

Event-triggered Adaptive Fuzzy Control for Interconnected Large-scale Systems With Unmodeled Dynamics
-
摘要:
针对一类具有未建模动态及执行器故障的非严格反馈非线性互联大系统, 提出一种基于事件触发机制的模糊分散自适应输出反馈控制算法. 首先, 通过设计模糊状态观测器估计系统中不可测的状态, 并引入李雅普诺夫函数约束未建模动态. 然后, 提出一种基于事件触发机制的自适应容错控制器补偿多个执行器故障产生的影响. 最后, 利用障碍李雅普诺夫函数实现对系统输出的约束, 并证明闭环系统中所有信号均是半全局一致最终有界的, 且设计的事件触发机制可以避免Zeno行为. 数值仿真结果验证所提出设计方案的可行性及有效性.
Abstract:This paper develops an event-triggered fuzzy decentralized adaptive output feedback control method for a class of nonstrict-feedback interconnected large-scale nonlinear systems with unmodeled dynamics and actuator faults. Firstly, a fuzzy state observer is designed to estimate the unmeasurable states, and unmodeled dynamics will be addressed by using the Lyapunov function method. Furthermore, an event-triggered-based adaptive fault-tolerant controller is proposed to compensate the effect of multiple actuator faults. Finally, by using the barrier Lyapunov function, the contravention of the output constraint will be excluded. And all signals of the closed-loop system will be ensured to be semiglobally uniformly ultimately bounded and the Zeno behavior will be avoided. The numerical simulation results illustrate the effectiveness and availability of the proposed design method.
-
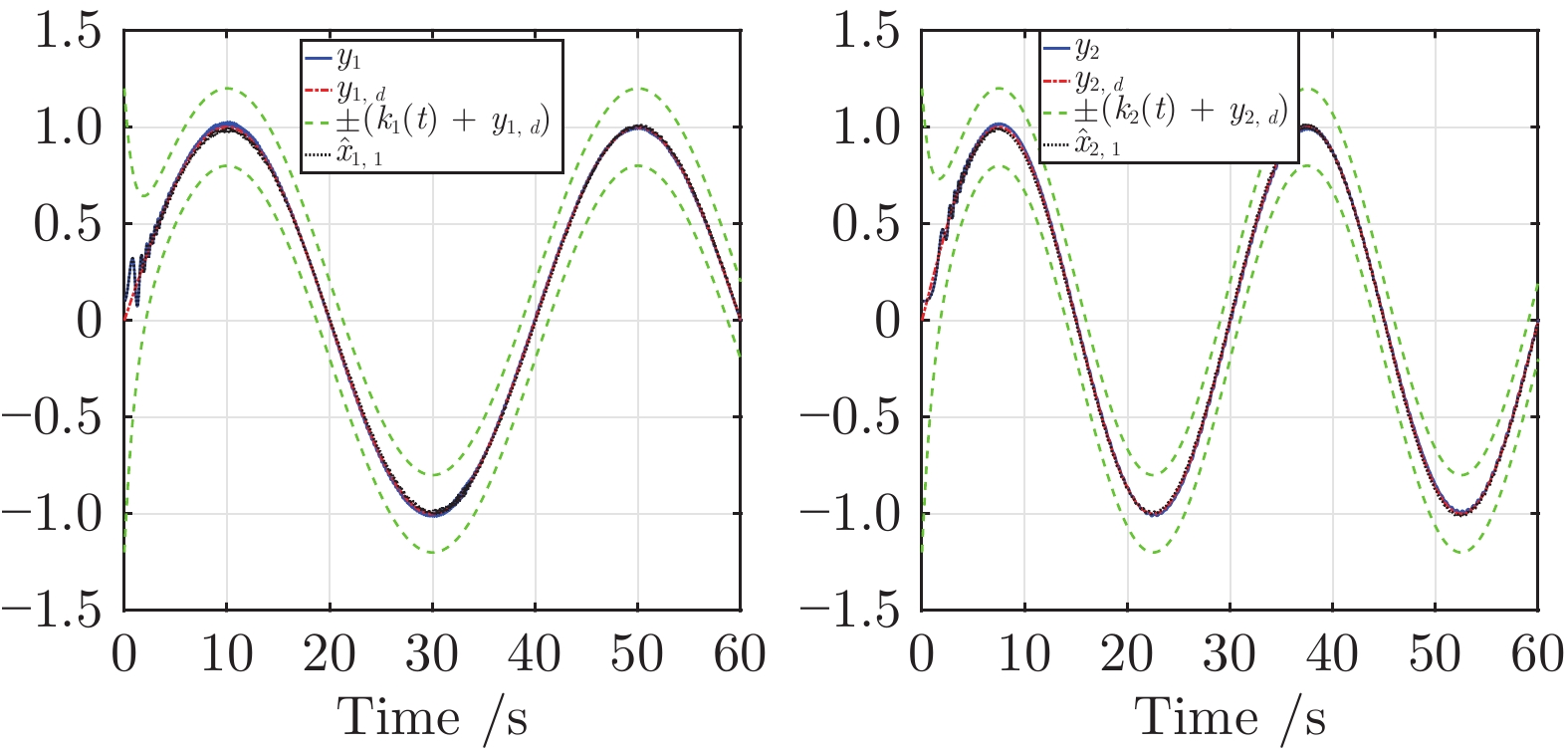
图 1 子系统的输出
$y_{1},y_2$ 和观测状态$\hat{x}_{1,1},\hat{x}_{2,1}$ 的响应曲线Fig. 1 Trajectories of output
$y_{1},y_2$ and observer$\hat{x}_{1,1},\hat{x}_{2,1}$ -
[1] Huang S N, Tan K K, Lee T H. Decentralized control design for large-scale systems with strong interconnections using neural networks. IEEE Transactions on Automatic Control, 2003, 48(5): 805-810 doi: 10.1109/TAC.2003.811258 [2] Huang S N, Tan K K, Lee T H. Decentralized control of a class of large-scale nonlinear systems using neural networks. Automatica, 2005, 41(9): 1645-1649 doi: 10.1016/j.automatica.2005.02.010 [3] Tong S C, Li Y M, Liu Y J. Adaptive fuzzy output feedback decentralized control of pure-feedback nonlinear large-scale systems. International Journal of Robust and Nonlinear Control, 2014, 24(5): 930-954 doi: 10.1002/rnc.2927 [4] Li T S, Li R H, Li J F. Decentralized adaptive neural control of nonlinear interconnected large-scale systems with unknown time delays and input saturation. Neurocomputing, 2011, 74(14): 2277-2283 [5] Tong S C, Li Y M, Li T S. Observer-based adaptive fuzzy backstepping dynamic surface control for a class of non-linear systems with unknown time delays. IET Control Theory & Applications, 2011, 5(12): 1426-1438 [6] Zhou Q, Shi P, Xu S Y, Li H Y. Observer-based adaptive neural network control for nonlinear stochastic systems with time delay. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(1): 71-80 doi: 10.1109/TNNLS.2012.2223824 [7] Wang F, Liu Z, Li X H, et al. Observer-based finite time control of nonlinear systems with actuator failures. Information Sciences, 2019, 500: 1-14 doi: 10.1016/j.ins.2019.05.067 [8] Yang Y, Yue D. Observer-based decentralized adaptive NNs fault-tolerant control of a class of large-scale uncertain nonlinear systems with actuator failures. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(3): 528-542 doi: 10.1109/TSMC.2017.2744676 [9] Zhang L L, Yang G H. Observer-based adaptive decentralized fault-tolerant control of nonlinear large-scale systems with sensor and actuator faults. IEEE Transactions on Industrial Electronics, 2019, 66(10): 8019-8029 doi: 10.1109/TIE.2018.2883267 [10] 杨彬, 周琪, 曹亮, 等. 具有指定性能和状态约束的多智能体系统事件触发控制. 自动化学报, 2019, 45(8): 1527-1535Yang Bin, Zhou Qi, Cao Liang, et al. Event-triggered control for multi-agent systems with prescribed performance and full state constraints. Acta Automatica Sinica, 2019, 45(8): 1527-1535 [11] Li Y M, Ma Z Y, Tong S C. Adaptive fuzzy output-constrained fault-tolerant control of nonlinear stochastic large-scale systems with actuator faults. IEEE Transactions on Cybernetics, 2017, 47(9): 2362-2376 doi: 10.1109/TCYB.2017.2681683 [12] 郑晓宏, 董国伟, 周琪, 等. 带有输出约束条件的随机多智能体系统容错控制. 控制理论与应用, 2020, 37(5): 961-968Zheng Xiao-hong, Dong Guo-wei, Zhou Qi, et al. Fault-tolerant control for stochastic multi-agent systems with output constraints. Control Theory&Applications, 2020, 37(5): 961-968 [13] Wang L J, Li H Y, Zhou Q, et al. Adaptive fuzzy control for nonstrict feedback systems with unmodeled dynamics and fuzzy dead zone via output feedback. IEEE Transactions on Cybernetics, 2017, 47(9): 2400-2412 doi: 10.1109/TCYB.2017.2684131 [14] Tong S C, Wang T, Li Y M, et al. Adaptive neural network output feedback control for stochastic nonlinear systems with unknown dead-zone and unmodeled dynamics. IEEE Transactions on Cybernetics, 2014, 44(6): 910-921 doi: 10.1109/TCYB.2013.2276043 [15] Wu Z J, Xie X J, Zhang S Y. Adaptive backstepping controller design using stochastic small-gain theorem. Automatica, 2007, 43(4): 608-620 doi: 10.1016/j.automatica.2006.10.020 [16] Wang X J, Yin X H, Wu Q H, et al. Disturbance observer based adaptive neural control of uncertain MIMO nonlinear systems with unmodeled dynamics. Neurocomputing, 2018, 313: 247-258 doi: 10.1016/j.neucom.2018.06.031 [17] Tong S C, Liu C L, Li Y M. Fuzzy-adaptive decentralized output-feedback control for large-scale nonlinear systems with dynamical uncertainties. IEEE Transactions on Fuzzy Systems, 2010, 18(5): 845-861 doi: 10.1109/TFUZZ.2010.2050326 [18] Xia X N, Zhang T P. Adaptive quantized output feedback DSC of uncertain systems with output constraints and unmodeled dynamics based on reduced-order K-filters. Neurocomputing, 2018, 310: 236-245 doi: 10.1016/j.neucom.2018.05.031 [19] Chen M, Tao G. Adaptive fault-tolerant control of uncertain nonlinear large-scale systems with unknown dead zone. IEEE Transactions on Cybernetics, 2016, 46(8): 1851-1862 doi: 10.1109/TCYB.2015.2456028 [20] 张绍杰, 吴雪, 刘春生. 执行器故障不确定非线性系统最优自适应输出跟踪控制. 自动化学报, 2018, 44(12): 2188-2197Zhan Shao-Jie, Wu Xue, Liu Chun-Sheng. Optimal adaptive output tracking control for a class of uncertain nonlinear systems with actuator failures. Acta Automatica Sinica, 2018, 44(12): 2188-2197 [21] Cao L, Li H Y, Wang N, et al. Observer-based event-triggered adaptive decentralized fuzzy control for nonlinear large-scale systems. IEEE Transactions on Fuzzy Systems, 2019, 27(6): 1201-1214 doi: 10.1109/TFUZZ.2018.2873971 [22] Yu H, Hao F, Chen T W. A uniform analysis on input-to-state stability of decentralized event-triggered control systems. IEEE Transactions on Automatic Control, 2019, 64(8): 3423-3430 doi: 10.1109/TAC.2018.2879764 [23] Rahnama A, Xia M, Antsaklis P J. A QSR-dissipativity based design for event-triggered networked systems. IEEE Transactions on Automatic Control, 2019, 64(6): 2590-2597 doi: 10.1109/TAC.2018.2866987 [24] 周琪, 陈广登, 鲁仁全, 等. 基于干扰观测器的输入饱和多智能体系统事件触发控制. 中国科学:信息科学, 2019, 49(11): 1502-1516 doi: 10.1360/SSI-2019-0105Zhou Qi, Chen Guang-Deng, Lu Ren-Quan, et al. Disturbance-observer-based event-triggered control for multi-agent systems with input saturation. Scientia Sinica Information, 2019, 49(11): 1502-1516 doi: 10.1360/SSI-2019-0105 [25] Jiang Z P, Hill D J. A robust adaptive backstepping scheme for nonlinear systems with unmodeled dynamics. IEEE Transactions on Automatic Control, 1999, 44(9): 1705-1711 doi: 10.1109/9.788536 [26] Chen B, Liu X P, Ge S S, et al. Adaptive fuzzy control of a class of nonlinear systems by fuzzy approximation approach. IEEE Transactions on Fuzzy Systems, 2012, 20(6): 1012-1021 doi: 10.1109/TFUZZ.2012.2190048 [27] Wang L Q, Dong J X, Xi C J. Event-triggered adaptive consensus for fuzzy output-constrained multi-agent systems with observers. Journal of the Franklin Institute, 2020, 357(1): 82-105 doi: 10.1016/j.jfranklin.2019.09.033 [28] Wang H Q, Chen B, Liu X P, et al. Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints. IEEE Transactions on Cybernetics, 2013, 43(6): 2093-2104 doi: 10.1109/TCYB.2013.2240296 [29] 郭子杰, 白伟伟, 周琪, 等. 基于性能指标约束的一类输入死区非线性系统最优控制. 自动化学报, 2019, 45(11): 2128-2136Guo Zi-Jie, Bai Wei-Wei, Zhou Qi, et al. Adaptive optimal control for a class of nonlinear systems with dead zone input and prescribed performance. Acta Automatica Sinica, 2019, 45(11): 2128-2136 [30] Yu J P, Shi P, Dong W J, et al. Observer and command-filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5962-5970 doi: 10.1109/TIE.2015.2418317 [31] Dong W J, Jay A Farrel, Marios M, et al. Command filtered adaptive backstepping. IEEE Transactions on Control Systems Technology, 2012, 20(3): 566-580 doi: 10.1109/TCST.2011.2121907 [32] Han Y, Yu J P, Zhao L, et al. Finite-time adaptive fuzzy control for induction motors with input saturation based on command filtering. IET Control Theory & Applications, 2018, 12(15): 2148-2155 [33] Qiu J B, Sun K K, Rudas I J, et al. Command filter-based adaptive NN control for MIMO nonlinear systems with full-state constraints and actuator hysteresis. IEEE Transactions on Cybernetics, 2019, 50(7): 2905-2915 -





 下载:
下载:




计量
- 文章访问数: 1626
- HTML全文浏览量: 440
- PDF下载量: 336
- 被引次数: 0
