

-
摘要: 由于复杂装备系统缺少可工程应用的弹性度量方法, 且传统可靠性工程难以描述装备从故障到修复全过程的性质, 因此考虑装备系统在工作过程中性能变化的连续性以及扰动、故障和修复的不确定性, 利用可靠性工程相关参数, 针对无子系统的简单装备提出一种混合型弹性度量方法. 在此基础上, 考虑子系统对复杂系统的影响, 以及复杂系统故障和修复概率, 提出一种针对复杂装备系统的弹性度量方法. 最后, 通过基于弹性理论的组件重要度计算案例, 评估复杂装备系统各个子系统性能变化对整个装备的影响重要程度, 验证了方法的可行性和有效性.Abstract: Because of the engineering resilience theory has few applicable measurement formulas for equipment systems, and because of the traditional reliability engineering is difficult to describe the whole process of equipment from fault to repair, considering the continuity of performance change and the uncertainty of disturbance, fault occurrence and repair in the working process of the equipment system, a hybrid resilience measurement method is proposed for the simple equipment without subsystems by using the parameters of reliability engineering. On this basis, considering the influence of subsystems on complex systems and the possibility of complex system failure and repair, a resilience measurement method for complex equipment systems is proposed. Finally, a component importance calculation method based on resilience theory is presented to evaluate the influence of the performance change of each subsystem overall complex equipment system, and the effectiveness of the method is verified by simulation.
-
Key words:
- Resilience /
- reliability engineering /
- complex system /
- component importance
-

图 6 含有7个子系统的复杂传输系统网络拓扑结构
Fig. 6 Network topology of complex transport system with 7 subsystems
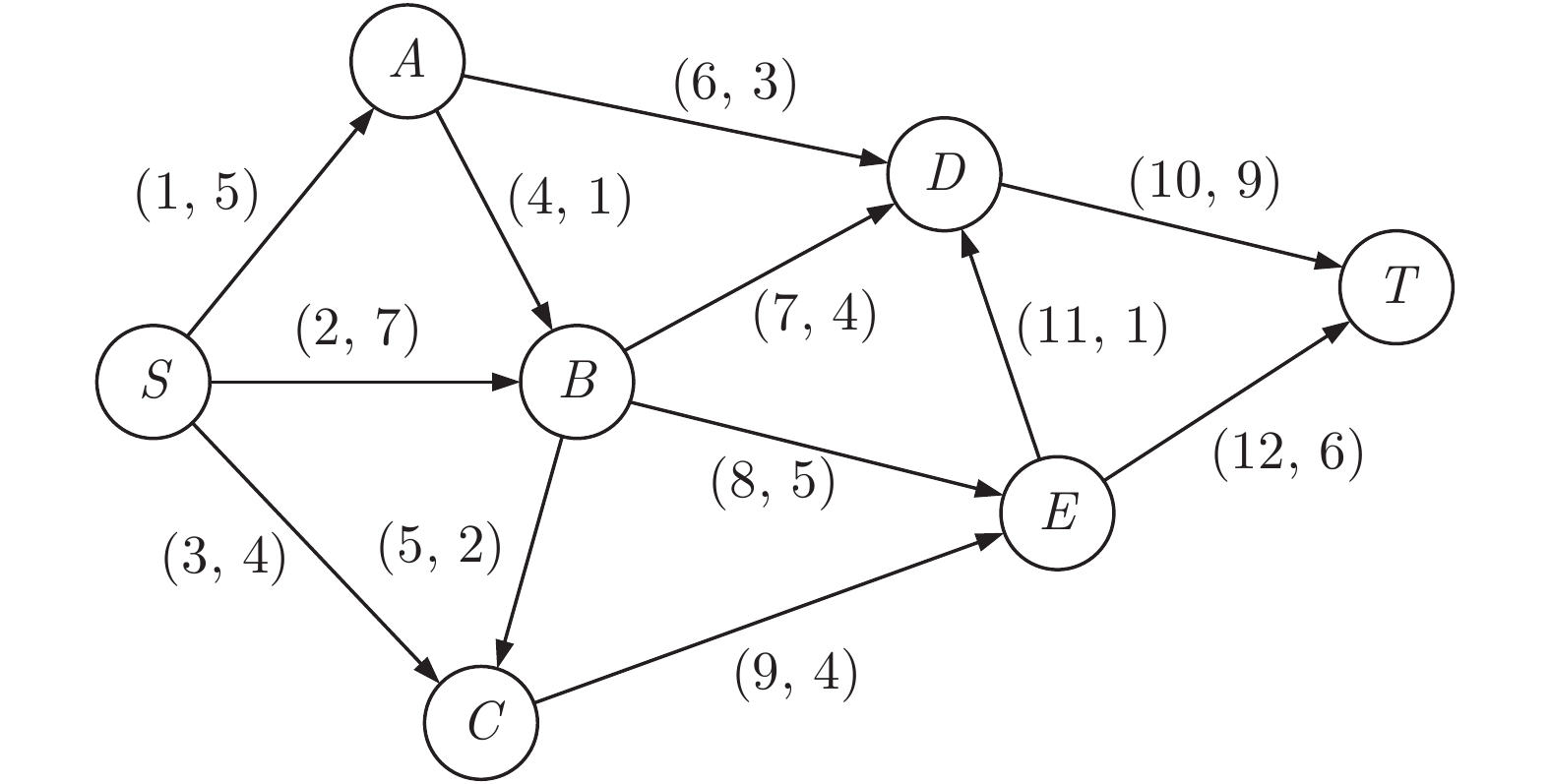
图 10 含有12个子系统的复杂传输系统网络拓扑结构
Fig. 10 Network topology of complex transport system with 12 subsystems
表 1 复杂系统可靠性参数
Table 1 Reliability parameters complex system
序号 PF (%) PR (%) MTTR (h) MTBF (h) 1 2 70 2.0 8.0 2 2 80 3.0 7.0 3 3 80 2.5 7.5 4 5 70 2.0 8.0 5 3 75 2.5 7.5 6 2 85 3.5 6.5 7 3 80 3.0 7.0 8 4 75 2.5 7.5 9 2 80 2.0 8.0 10 4 85 3.0 7.0 11 3 75 2.5 7.5 12 1 65 2.0 8.0  下载: 导出CSV
下载: 导出CSV
表 2 故障和修复子系统集合(部分)
Table 2 The sets of failed and repaired subsystems (portion)
X Y $\emptyset $ $\emptyset $ [1] $\emptyset $, [1] [1, 2] $\emptyset $, [1], [2], [1, 2] [1, 2, 3] $\emptyset $, [1], [2], [3], [1, 2], [1, 3], [2, 3], [1, 2, 3] [1, 2, 3, 4] $\emptyset $, [1], [2], [3], [4], [1, 2], [1, 3], [1, 4],
[2, 3], [2, 4], [3, 4], [1, 2, 3], [1, 2, 4],
[1, 3, 4], [2, 3, 4], [1, 2, 3, 4]${\bf{\vdots } }$ ${\bf{\vdots} }$
下载: 导出CSV
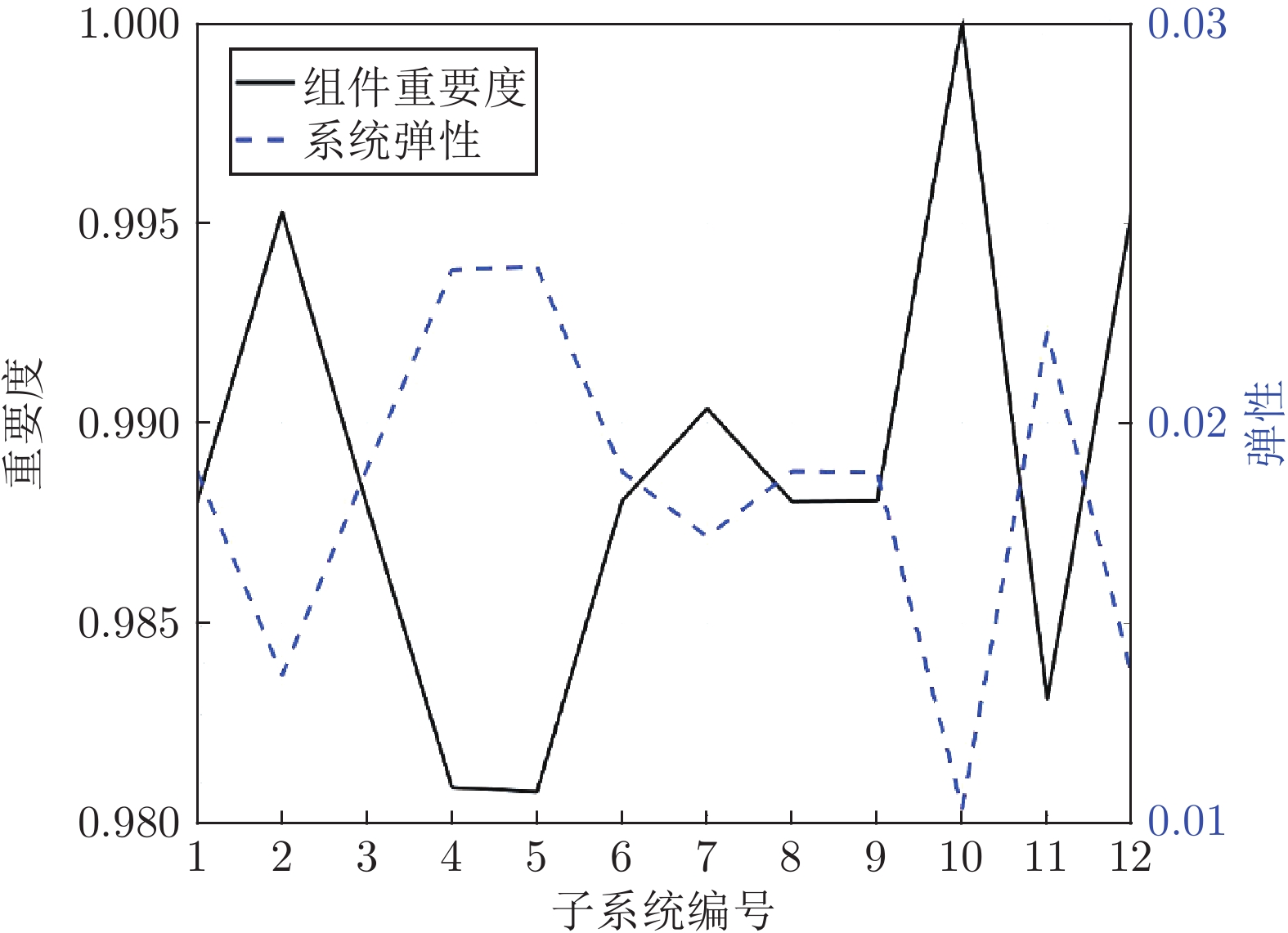
表 3 归一化的子系统重要度
Table 3 The normalized importance of subsystems
序号 RF CIR 1 0.0188 0.9881 2 0.0137 0.9953 3 0.0189 0.9880 4 0.0238 0.9809 5 0.0239 0.9808 6 0.0188 0.9881 7 0.0172 0.9904 8 0.0188 0.9881 9 0.0188 0.9881 10 0.0104 1.0000 11 0.0223 0.9831 12 0.0137 0.9953
下载: 导出CSV
-
[1] Feng G, Patelli E, Beer M, Coolen F P A. Imprecise system reliability and component importance based on survival signature. Reliability Engineering & System Safety, 2016, 150: 116-125 [2] Cats O, Koppenol G J, Warnier M. Robustness assessment of link capacity reduction for complex networks: Application for public transport systems. Reliability Engineering & System Safety, 2017, 167: 544-553 [3] Jiang W, Xie C H, Zhuang M Y, Shou Y H, Tang Y C. Sensor data fusion with Z-numbers and its application in fault diagnosis. Sensors, 2016, 16(9): Article No. 1509 doi: 10.3390/s16091509 [4] Holling C S. Resilience and stability of ecological systems. Annual Review of Ecology and Systematics, 1973, 4: 1-23 doi: 10.1146/annurev.es.04.110173.000245 [5] Leveson N. A new accident model for engineering safer systems. Safety Science, 2004, 42(4): 237-270 doi: 10.1016/S0925-7535(03)00047-X [6] Aven T. On some recent definitions and analysis frameworks for risk, vulnerability, and resilience. Risk Analysis, 2011, 31(4): 515-522 doi: 10.1111/j.1539-6924.2010.01528.x [7] Neches R. Engineered Resilient Systems DoD Science and Technology Priority Area. Washington: Office of the Deputy Assistant Secretary of Defense for Systems Engineering, 2012 [8] Scott L. Engineered Resilient Systems DoD Science and Technology Priority. Washington: Office of the Deputy Assistant Secretary of Defense for Systems Engineering, 2012 [9] Carlson J, Bassett G, Buehring W, Collins M, Folga S, Haffenden B, et al. Resilience: Theory and Application, Technical Report: ANL/DIS-12-1, Argonne National Laboratory, 2012 [10] Henry D, Ramirez-Marquez J E. Generic metrics and quantitative approaches for system resilience as a function of time. Reliability Engineering & System Safety, 2012, 99: 114-122 [11] Goerger S R, Madni A M, Eslinger O J. Engineered resilient systems: A DoD perspective. Procedia Computer Science, 2014, 28: 865-872 doi: 10.1016/j.procs.2014.03.103 [12] 蓝羽石, 周光霞, 王珩, 易侃. 韧性指挥信息系统构建机理及实现研究. 指挥与控制学报, 2015, 1(3): 284-291Lan Yu-Shi, Zhou Guang-Xia, Wang Heng, Yi Kan. Construction mechanism and implementation of resilient command information systems. Journal of Command and Control, 2015, 1(3): 284-291 [13] 费爱国. 韧性指挥与控制系统设计相关问题探析. 指挥信息系统与技术, 2017, 8(2): 1-4Fei Ai-Guo. Analysis on related issues about resilient command and control system design. Command Information System and Technology, 2017, 8(2): 1-4 [14] 崔琼, 李建华. 网络化指挥信息系统弹性度量方法. 军事运筹与系统工程, 2016, 30(4): 18-24, 48Cui Qiong, Li Jian-Hua. Resilience measurement of networked command information system. Military Operations Research and Assessment, 2016, 30(4): 18-24, 48 [15] 杨飞生, 汪璟, 潘泉, 康沛沛. 网络攻击下信息物理融合电力系统的弹性事件触发控制. 自动化学报, 2019, 45(1): 110-119Yang Fei-Sheng, Wang Jing, Pan Quan, Kang Pei-Pei. Resilient event-triggered control of grid cyber-physical systems against cyber attack. Acta Automatica Sinica, 2019, 45(1): 110-119 [16] Toroghi S S H, Thomas V M. A framework for the resilience analysis of electric infrastructure systems including temporary generation systems. Reliability Engineering & System Safety, 2020, 202: Article No. 107013 [17] Azarbahram A, Amini A, Sojoodi M. Resilient fixed-order distributed dynamic output feedback load frequency control design for interconnected multi-area power systems. IEEE/CAA Journal of Automatica Sinica, 2019, 6(5): 1139-1151 doi: 10.1109/JAS.2019.1911687 [18] Mishra S, Anderson K, Miller B, Boyer K, Warren A. Microgrid resilience: A holistic approach for assessing threats, identifying vulnerabilities, and designing corresponding mitigation strategies. Applied Energy, 2020, 264: Article No. 114726 doi: 10.1016/j.apenergy.2020.114726 [19] Patriarca R, Bergström J, Di Gravio G, Costantino F. Resilience engineering: Current status of the research and future challenges. Safety Science, 2018, 102: 79-100 doi: 10.1016/j.ssci.2017.10.005 [20] Li X H, Zhao P, Li L X. Resilience and reliability analysis of P2P network systems. Operations Research Letters, 2010, 38(1): 20-26 doi: 10.1016/j.orl.2009.09.006 [21] Tran H T, Balchanos M, Domerçant J C, Mavris D N. A framework for the quantitative assessment of performance-based system resilience. Reliability Engineering & System Safety, 2017, 158: 73-84 [22] 李瑞莹, 杜时佳, 康锐. 复杂系统弹性建模与评估. 北京: 化学工业出版社, 2019.Li Rui-Ying, Du Shi-Jia, Kang Rui. Modeling and Evaluation of Complex System Resilience. Beijing: Chemical Industry Press, 2019. [23] Jin C, Li R Y, Kang R. Analysis and comparison of three measures for system resilience. Risk, Reliability and Safety: Innovating Theory and Practice. London: CRC Press, 2016. 2145−2151 [24] Bruneau M, Chang S E, Eguchi R T, Lee G C, O'Rourke T D, Reinhorn A M, et al. A framework to quantitatively assess and enhance the seismic resilience of communities. Earthquake Spectra, 2003, 19(4): 733-752 doi: 10.1193/1.1623497 [25] Cimellaro G P, Reinhorn A M, Bruneau M. Seismic resilience of a hospital system. Structure and Infrastructure Engineering, 2010, 6(1-2): 127-144 doi: 10.1080/15732470802663847 [26] 黄浪, 吴超, 王秉. 系统安全韧性的塑造与评估建模. 中国安全生产科学技术, 2016, 12(12): 15-21Huang Lang, Wu Chao, Wang Bing. Modeling on shaping and assessment of system safety resilience. Journal of Safety Science and Technology, 2016, 12(12): 15-21 [27] Reed D A, Kapur K C, Christie R D. Methodology for assessing the resilience of networked infrastructure. IEEE Systems Journal, 2009, 3(2): 174-180 doi: 10.1109/JSYST.2009.2017396 [28] Zobel C W. Representing perceived tradeoffs in defining disaster resilience. Decision Support Systems, 2011, 50(2): 394-403 doi: 10.1016/j.dss.2010.10.001 [29] Zobel C W, Khansa L. Characterizing multi-event disaster resilience. Computers & Operations Research, 2014, 42: 83-94 [30] Ouyang M, Dueñas-Osorio L, Min X. A three-stage resilience analysis framework for urban infrastructure systems. Structural Safety, 2012, 36-37: 23-31 doi: 10.1016/j.strusafe.2011.12.004 [31] Ouyang M, Wang Z H. Resilience assessment of interdependent infrastructure systems: With a focus on joint restoration modeling and analysis. Reliability Engineering & System Safety, 2015, 141: 74-82 [32] Li Z L, Jin C, Hu P, Wang C. Resilience-based transportation network recovery strategy during emergency recovery phase under uncertainty. Reliability Engineering & System Safety, 2019, 188: 503-514 [33] Chang S E, Shinozuka M. Measuring improvements in the disaster resilience of communities. Earthquake Spectra, 2004, 20(3): 739-755 doi: 10.1193/1.1775796 [34] Li Y, Lence B J. Estimating resilience for water resources systems. Water Resources Research, 2007, 43(7): Article No. W07422 [35] 石建伟, 刘俊先, 姜志平, 权冀川. 基于超网络的军事体系韧性评估. 指挥与控制学报, 2017, 3(3): 213-217Shi Jian-Wei, Liu Jun-Xian, Jiang Zhi-Ping, Quan Ji-Chuan. Evaluating military system of systems resilience using super networks. Journal of Command and Control, 2017, 3(3): 213-217 [36] 崔琼, 李建华, 冉淏丹, 南明莉. 基于任务能力的指挥信息系统超网络弹性度量. 指挥与控制学报, 2017, 3(2): 137-143Cui Qiong, Li Jian-Hua, Ran Hao-Dan, Nan Ming-Li. Resilience measurement of command information system super-network based on mission capability. Journal of Command and Control, 2017, 3(2): 137-143 [37] 荣明, 胡晓峰, 杨镜宇. 基于试验床的作战体系弹性评估研究. 系统仿真学报, 2018, 30(12): 4711-4717Rong Ming, Hu Xiao-Feng, Yang Jing-Yu. Research on assessment of operation system's resilience based on test bed. Journal of System Simulation, 2018, 30(12): 4711-4717 [38] Zhang C, Xu X, Dui H. Resilience Measure of Network Systems by Node and Edge Indicators. Reliability Engineering & System Safety, 2020, 202: Article No. 107035 [39] 康建设, 宋文渊, 白永生, 田霞. 装备可靠性工程. 北京: 国防工业出版社, 2019.Kang Jian-She, Song Wen-Yuan, Bai Yong-Sheng, Tian Xia. Equipment Reliability Engineering. Beijing: National Defense Industry Press, 2019. [40] Whitson J C, Ramirez-Marquez J E. Resiliency as a component importance measure in network reliability. Reliability Engineering & System Safety, 2009, 94(10): 1685-1693 [41] 潘星, 张国忠, 张跃东, 康锐. 工程弹性系统与系统弹性理论研究综述. 系统工程与电子技术, 2019, 41(9): 2006-2015 doi: 10.3969/j.issn.1001-506X.2019.09.13Pan Xing, Zhang Guo-Zhong, Zhang Yue-Dong, Kang Rui. Review of engineered resilient systems and system resilience theory. Systems Engineering and Electronics, 2019, 41(9): 2006-2015 doi: 10.3969/j.issn.1001-506X.2019.09.13 -

 下载:
下载:

计量
- 文章访问数: 1411
- HTML全文浏览量: 388
- PDF下载量: 179
- 被引次数: 0
