

Bipartite Practical Consensus Control of Multi-agent Systems With Communication Constraints
-
摘要: 针对存在量化数据、通信时滞等通信约束以及带有竞争关系的多智能体系统, 研究其二分实用一致性问题, 提出了一种基于量化器的分布式控制协议. 该协议基于结构平衡拓扑假设, 通过规范变换将具有竞争关系系统转变为具有非负连接权重系统, 使二分实用一致性问题转变为一般实用一致性问题. 利用微分包含理论、菲利波夫解的框架、代数图论以及Lyapunov稳定性理论, 证明了在本文所提控制策略下, 具有竞争关系的多智能体系统能实现二分实用一致, 即智能体状态收敛至模相同但符号不同的可控区间, 并给出了误差收敛上界值. 仿真试验进一步验证了理论结果的有效性.Abstract: This paper investigates the bipartite practical consensus problem for a multi-agent system subject to quantization and communication delay. The interaction between agents is modeled by a structurally balanced topology, where both cooperation and competition coexist within a group. Based on the quantizer, a novel distributed controller is proposed. Up to a virtue of the gauge transformation, a system with competition interactions is equivalent to a system with non-negative connection weights. Accordingly, the bipartite practical consensus problem is turned into the general practical consensus problem. By employing the theory of differential inclusion, the framework of Filippov solution, Lyapunov stability theory and algebraic graph theory, we prove that all agents can be guaranteed to converge to an interval which is the same for all in modulus but not in sign and obtain the upper bound of convergence error. The simulation results are provided to demonstrate the effectiveness of the theoretical results.
-
Key words:
- Multi-agent systems /
- signed graphs /
- bipartite practical consensus /
- quantization /
- time delay
-

图 2
$\gamma = 3,$ $\eta = 1$ 智能体位置状态轨迹Fig. 2
$\gamma = 3,$ $\eta = 1$ The trajectories of all agents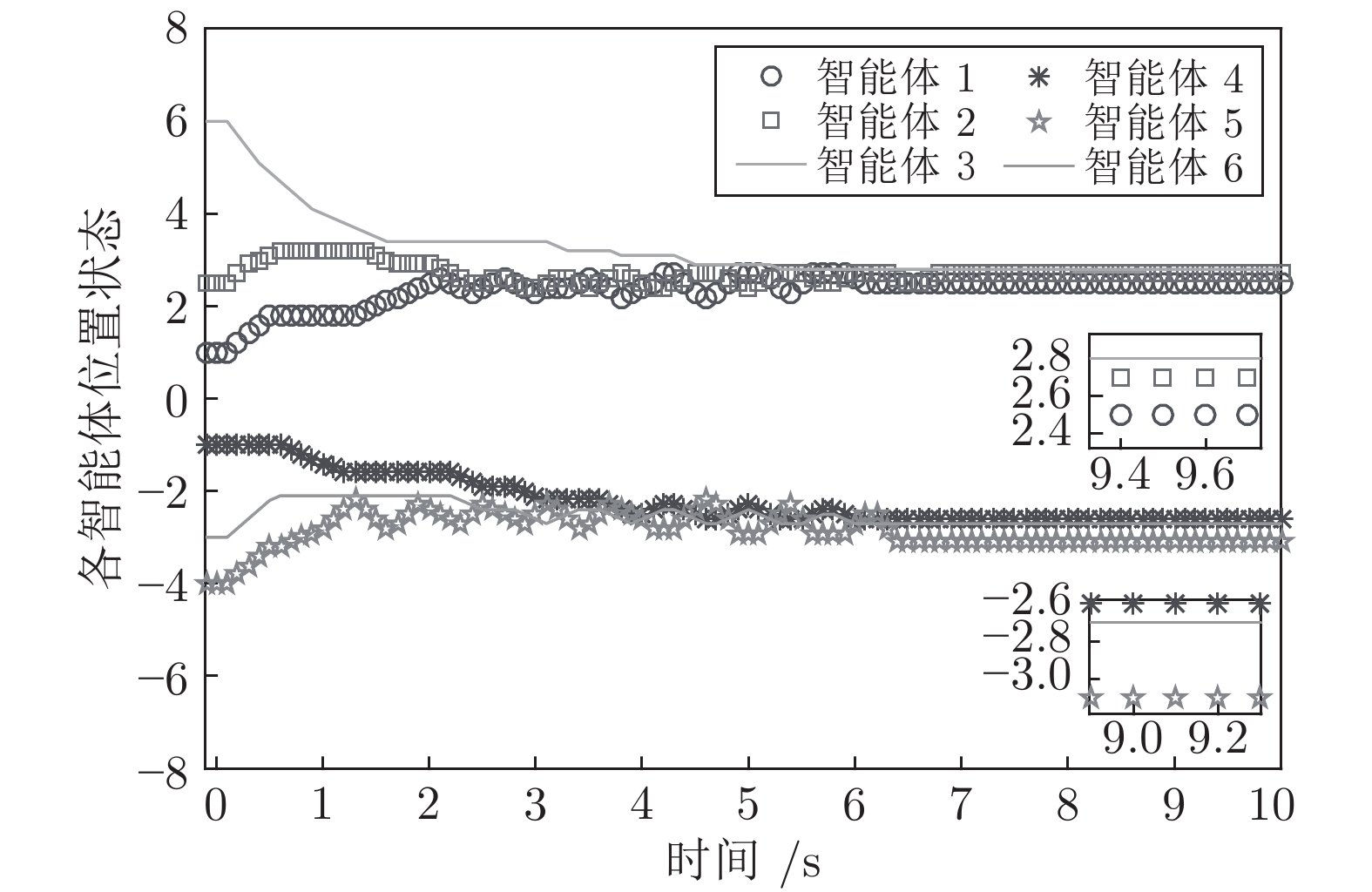
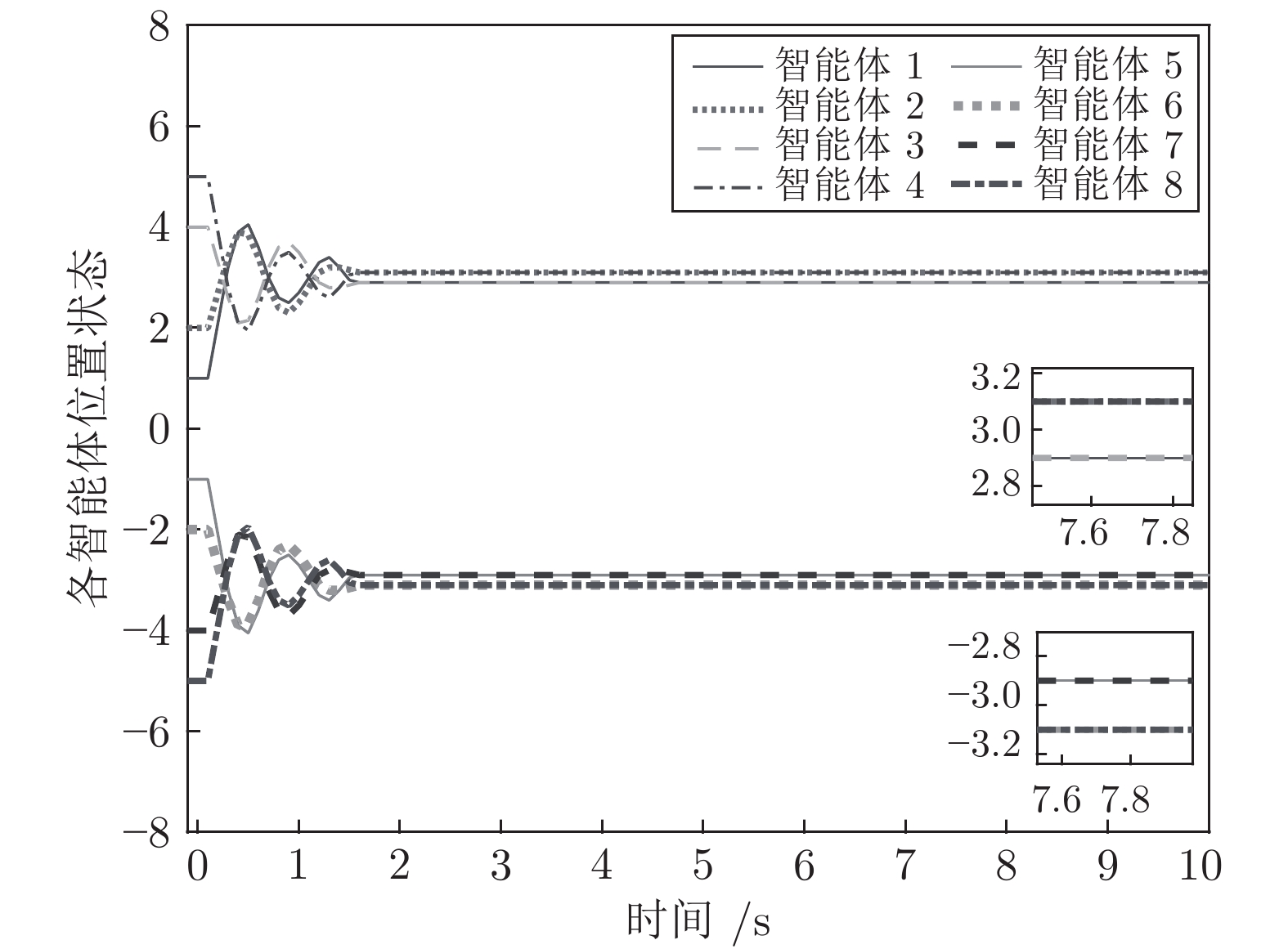
图 3
$\gamma = 1,$ $\eta = 1$ 智能体位置状态轨迹Fig. 3
$\gamma = 1,$ $\eta = 1$ The trajectories of all agents
图 4
$\gamma = 0.1,$ $\eta = 1$ 智能体位置状态轨迹Fig. 4
$\gamma = 0.1,$ $\eta = 1$ The trajectories of all agents -
[1] Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules[J]. IEEE Transactions on Automatic Control, 2003, 48(6): 988--1001. doi: 10.1109/TAC.2003.812781 [2] Forti M, Nistri P, Papini D. Global exponential stability and global convergence in finite time of delayed neural networks with infinite gain[J]. IEEE Transactions on Neural Networks, 2005, 16(6): 1449--1463. doi: 10.1109/TNN.2005.852862 [3] Yu W W, Chen G R, Cao M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems[J]. Automatica, 2010, 46(6): 1089--1095. doi: 10.1016/j.automatica.2010.03.006 [4] 陈世明, 化俞新, 祝振敏, 赖强. 邻域交互结构优化的多智能体快速蜂拥控制算法[J]. 自动化学报, 2015, 41(12): 2092--2099.Chen Shi-Ming, Hua Yu-Xin, Zhu Zhen-Min, Lai Qiang. Fast flocking algorithm for multi-agent systems by opti-mizing local interactive topology[J]. Acta Automatica Sinica, 2015, 41(12): 2092--2099. [5] Kim J M, Park J B, Choi Y H. Leaderless and leader-following consensus for heterogeneous multi-agent systems with random link failures[J]. Iet Control Theory and Applications, 2014, 8(1): 51--60. doi: 10.1049/iet-cta.2012.0855 [6] Ma Q, Wang Z, Miao G Y. Second-order group consensus for multi-agent systems via pinning leader-following approach[J]. Journal of The Franklin Institute-engineering and Applied Mathematics, 2014, 351(3): 1288--1300. doi: 10.1016/j.jfranklin.2013.11.002 [7] Roy S. Scaled consensus[J]. Automatica, 2015: 259--262. [8] Zhang Z, Chen S M, Su H S. Scaled Consensus of second-order nonlinear multiagent systems with time-varying delays via aperiodically intermittent control[J]. IEEE Transactions on Cybernetics, 2020, 50(8): 3503--3516. doi: 10.1109/TCYB.2018.2883793 [9] S. Chen, Z. Zhang and Y. Zheng, "H∞ Scaled Consensus for MASs With Mixed Time Delays and Disturbances via Observer-Based Output Feedback," in IEEE Transactions on Cybernetics, vol. 52, no. 2, pp. 1321-1334, Feb. 2022, doi: 10.1109/TCYB.2020.3001643. [10] Wang Z H, Xu J J, Zhang H S. Consensusability of multi-agent systems with time-varying communication delay[J]. Systems & Control Letters, 2014: 37--42. [11] Chen Y, Shi Y. Consensus for Linear Multiagent Systems With Time-Varying Delays: A Frequency Domain Perspective[J]. IEEE Transactions on Systems, Man, and Cybernetics, 2017, 47(8): 2143--2150. [12] Qiu Z R, Xie L H, Hong Y G. Quantized Leaderless and Leader-Following Consensus of High-Order Multi-Agent Systems With Limited Data Rate[J]. IEEE Transactions on Automatic Control, 2016, 61(9): 2432--2447. doi: 10.1109/TAC.2015.2495579 [13] Dong X W, Xi J X, Shi Z Y, Zhong Y S. Practical consensus for high-order linear time-invariant swarm systems with interaction uncertainties, time-varying delays ang external disturbances[J]. International Journal of systems Science, 2013, 44(10): 1843--1856. doi: 10.1080/00207721.2012.670296 [14] Bernuau E, Moulay E, Coirault P, Lsfoula F. Practical consensus of homogeneous sampled-data multiagent systems[J]. IEEE Transactions on Automatic Control, 2019, 64(11): 4691--4697. doi: 10.1109/TAC.2019.2904442 [15] Ning B, Han Q L, Zuo Z Y. Practical fixed-time consensus for integrator-type multi-agent systems: A time base generator approach[J]. Automatica, 2019, 105(105): 406--414. [16] Panteley E, Loria A, Elati A. Practical dynamic consensus of Stuart–Landau oscillators over heterogeneous networks[J]. International Journal of Control, 2020, 93(2): 261--273. doi: 10.1080/00207179.2018.1551618 [17] 张文, 马忠军, 王毅. 带未知耦合权重的领导-跟随多智能体系统的实用一致性[J]. 自动化学报, 2018, 44(12): 2300--2304.Zhang Wen, Ma Zhong-Jun, Wang Yi. Practical consensus of leader-following multi-agent system with unknown coupling weights[J]. Acta Automatica Sinica, 2018, 44(12): 2300--2304. [18] Altafini C. Consensus problems on networks with antagonistic interactions[J]. IEEE Transactions on Automatic Control, 2013, 58(4): 935--946. doi: 10.1109/TAC.2012.2224251 [19] Zhang H, Chen J. Bipartite consensus of multi-agent systems over signed graphs: State feedback and output feedback control approaches[J]. International Journal of Robust and Nonlinear Control, 2017, 27(1): 3--14. doi: 10.1002/rnc.3552 [20] Jiang Y, Zhang H W, Chen J. Sign-consensus of linear multi-agent systems over signed directed graphs[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5075--5083. doi: 10.1109/TIE.2016.2642878 [21] Meng D Y, Meng Z Y, Hong Y G. Uniform convergence for signed networks under directed switching topologies[J]. Automatica, 2018, 90: 8--15. doi: 10.1016/j.automatica.2017.12.028 [22] Pan L, Shao H, Mesbahi M, Li D. Bipartite consensus on matrix-valued weighted networks[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2018, 66(8): 1441--1445. [23] Su H S, Chen J H, Yang Y C. The bipartite consensus for multi-agent systems with matrix-weight-based signed network[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2019, 67(10): 2019--2023. [24] 翟世东, 刘佩, 高辉. 具有对抗关系和时变拓扑的耦合离散系统有界双向同步[J]. 自动化学报, 2020.Zhai Shi-Dong, Liu Pei, Gao Hui. Bounded bipartite synchronization for coupled discrete systems under antagonistic[J]. Acta Automatica Sinica, to be publication. 2020. [25] Akshay K, Tamer B, R. Srikant. Quantized consensus[J]. Automatica, 2007, 43: 1192--1203. doi: 10.1016/j.automatica.2007.01.002 [26] Dimarogonasa D V, Johansson K H. Stability analysis for multi-agent systems using the incidence martrix: Quantized communication and formation control[J]. Automatica, 2010, 46(4): 695--700. doi: 10.1016/j.automatica.2010.01.012 [27] Ceragioli F, Claudio D P, Paolo F. Discontinuities and hysteresis in quantized average consensus[J]. Automatica, 2011, 47(9): 1916--1928. doi: 10.1016/j.automatica.2011.06.020 [28] Zhu Y R, Li S L, Ma J Y, Zheng Y S. Bipartite consensus in networks of agents with antagonistic interactions and quantization[J]. IEEE Transactions on circuits and systems-express briefs, 2018, 65(12): 2012--2018. doi: 10.1109/TCSII.2018.2811803 [29] Wu J, Deng Q, Han T, Yan H C. Distributed bipartite tracking consensus of nonlinear multi-agent systems with quantized communication[J]. Neurocomputing, 2020. 395: 78--85. doi: 10.1016/j.neucom.2020.02.017 -

 下载:
下载:

















图(6)
计量
- 文章访问数: 1886
- HTML全文浏览量: 741
- PDF下载量: 350
- 被引次数: 0
