

Bipartite Practical Consensus Control of Multi-agent Systems With Communication Constraints
-
摘要: 针对存在量化数据、通信时滞等通信约束以及带有竞争关系的多智能体系统, 研究其二分实用一致性问题, 提出了一种基于量化器的分布式控制协议. 该协议基于结构平衡拓扑假设, 通过规范变换将具有竞争关系系统转变为具有非负连接权重系统, 使二分实用一致性问题转变为一般实用一致性问题. 利用微分包含理论、菲利波夫解的框架、代数图论以及Lyapunov稳定性理论, 证明了在本文所提控制策略下, 具有竞争关系的多智能体系统能实现二分实用一致, 即智能体状态收敛至模相同但符号不同的可控区间, 并给出了误差收敛上界值. 仿真试验进一步验证了理论结果的有效性.Abstract: This paper investigates the bipartite practical consensus problem for a multi-agent system subject to quantization and communication delay. The interaction between agents is modeled by a structurally balanced topology, where both cooperation and competition coexist within a group. Based on the quantizer, a novel distributed controller is proposed. Up to a virtue of the gauge transformation, a system with competition interactions is equivalent to a system with non-negative connection weights. Accordingly, the bipartite practical consensus problem is turned into the general practical consensus problem. By employing the theory of differential inclusion, the framework of Filippov solution, Lyapunov stability theory and algebraic graph theory, we prove that all agents can be guaranteed to converge to an interval which is the same for all in modulus but not in sign and obtain the upper bound of convergence error. The simulation results are provided to demonstrate the effectiveness of the theoretical results.
-
Key words:
- Multi-agent systems /
- signed graphs /
- bipartite practical consensus /
- quantization /
- time delay
-
多智能体系统控制在近些年发展迅速, 广泛应用于无人机编队、传感器网络、机械臂装配、多导弹联合攻击等领域. 一致性作为协同控制的基础, 成为多智能体系统研究中的核心问题. 近年来, 学者们针对多智能体系统不同类型的一致性问题进行了大量研究, 如完全一致性[1-4]、领导-跟随一致性[5]、群体一致性[6]、比例一致性[7-9]等. 以上一致性成果主要集中在设计控制器使智能体状态误差最终趋于零. 但是在实际系统中, 由于执行器偏差、计算误差和恶劣环境, 智能体系统会存在通信约束(如通信时滞[10-11]、数据量化[12]等)、外部干扰、未知耦合等情况, 若仍要求每个智能体的真实运动状态之间的偏差趋于零, 这在有限条件下往往难以实现. 因此, Dong等[13]提出使智能体状态偏差函数在某一确定有界区间内波动的实用一致性概念, 可适用于更为复杂的实际系统.
为解决不同非理想网络环境中的一致性问题, 学者们对基于实用一致性概念的多智能体控制算法进行了深度研究[13-17]. 文献[13]研究了有向通信拓扑下具有外部扰动、相互作用不确定和时变时滞的一般高阶线性时不变群系统实用一致性问题. 在实际系统中, 当采样周期变大时, 若要使智能体状态误差趋于零, 初始状态就须非常接近, 显然限制了系统的有效性. 基于文献[13], 文献[14]进一步探讨了二阶多智能体系统齐次采样下的实用一致性. 为解决初始控制输入量过大, 出现输入饱和而导致削弱系统性能的问题, 文献[15]利用时基发生器, 提出多智能体系统的固定时间实用一致性框架. 具有振荡器的系统, 也难以实现智能体状态误差最终趋于零, 因此文献[16]研究了异质网络上非线性非均匀Stuart-Landa振子的实用动态一致性. 文献[17]研究了带未知耦合权重的领导-跟随多智能体系统的实用一致性. 以上已有的实用一致性研究只考虑非理想网络环境中智能体之间的合作关系, 即用非负权重的通信拓扑来表示. 在许多实际系统中, 合作与竞争关系同时存在.
文献[18]率先设通信拓扑权重为负以表示智能体间的竞争关系, 提出结构平衡图假设, 利用拉普拉斯算子证明了智能体系统能实现二分一致. 随后该结论被推广至更一般的线性多智能体系统[19-20]. 文献[21]研究了切换拓扑下多智能体系统的二分一致性, 建立了智能体稳态与拉普拉斯矩阵间的联系. 文献[22]引入正负生成树概念, 得出矩阵加权网络实现二分一致的充要条件, 但只适用于结构平衡图. 对于结构不平衡下的矩阵加权网络, 文献[23]通过矩阵耦合, 得出了实现二分一致的代数条件. 文献[24]针对含有对抗关系和时变拓扑的耦合离散系统, 考虑了拓扑切换后出现结构不平衡或结构平衡的两个子系统成员随时间变化的情况, 实现了有界双向同步. 上述二分一致性的研究大部分考虑智能体间的误差最终能趋于零, 本文将着重考虑受到通信时延、数据量化影响下智能体间的误差收敛于可控区间的二分实用一致性.
量化一致性概念最早由文献[25]提出, 随后文献[26]基于矩阵谱理论分别研究了通讯信息在一致量化和对数量化下多智能体系统的一致性问题. 文献[27]构建了基于磁滞效应量化的多智能体网络的混杂系统模型, 该混杂系统能够有效避免震颤现象, 并进一步分析了系统解的有限时间收敛性. 文献[28]考虑竞争关系和通信量化下多智能体系统的二分一致性. 文献[29]研究了具有量化通信约束的非线性多智能体系统分布式二分一致性问题. 以上论文对通信量化做了大量研究, 但均未考虑通信时滞, 而时滞也是影响多智能体系统一致性的重要因素.
综合考虑上述因素, 本文将以带有通信时滞和量化数据等通信约束且同时存在合作、竞争关系的实际系统为对象, 研究其二分实用一致性问题, 提出了基于融合时滞项、取整函数、符号函数的量化器的右端不连续控制协议. 根据微分包含理论和菲利波夫解的框架证明了控制器在右端不连续情况下仍能求得系统的全局解, 实现智能体位置状态收敛至模相同但符号不同的可控区间. 相较于文献[17], 本文同时考虑了智能体间的合作与竞争关系. 相较于文献[18, 20], 本文考虑了通信时滞、量化数据等通信约束对智能体系统的影响. 在文献[25, 28]的基础上, 本文将渐近一致性推广至实用一致性, 使智能体间的误差收敛于一个可控区间, 且收敛上界值与任何全局信息和初始值无关.
1. 预备知识及问题描述
1.1 图论
由
$n$ 个智能体组成的系统通信拓扑图可由有向图$G = \left( {V,E,{A}} \right)$ 描述, 其中$V = \left\{ {1,2, \cdots ,n} \right\}$ 为点集,$E \subseteq V \times V$ 为边集, 有向边${e_{ij}} = (i,j) \in E$ 表示智能体$i$ 向智能体$j$ 传输信息.${A} = [{a_{ij}}] \in {{\bf{R}}^{n \times n}}$ 为通信权重矩阵, 其对角线元素${a_{ii}} = 0$ . 若${a_{ij}} \ne 0$ , 则称智能体$j$ 为智能体$i$ 的邻居. 对任意$i,j$ 均有${a_{ij}} \geq 0$ , 则称图$G$ 为非负图, 否则为符号图. 度矩阵${D} \in {{\bf{R}}^{n \times n}}$ 定义为${D} = {\rm{diag}}\{ {d_1},{d_2}, \cdots ,{d_n}\}$ ,${\rm{diag}}\{ {d_1}, $ $ {d_2}, \cdots ,{d_n} \}$ 表示对角矩阵, 其对角线元素为$\{ {d_1}, $ $ {d_2}, \cdots ,{d_n} \}$ ,${d_i} = \sum\nolimits_{j = 1}^n {\left| {{a_{ij}}} \right|} $ . 拉普拉斯矩阵${L} \in {{\bf{R}}^{n \times n}}$ 定义为${L} = {D} - {A}$ , 其中${l_{ii}} = \sum\nolimits_{j = 1}^n {\left| {{a_{ij}}} \right|} $ , 且${l_{ij}} = - $ $ {a_{ij}}$ ,$\forall i \ne j$ . 若图中任意两个节点, 均存在一条有向路径, 则称图$G$ 为有向强连通图.定义 1[12]. 给定点
$p \in \bf{R}$ 到给定集合$U \subseteq \bf{R}$ 中的点的最短距离为:$${\rm dist}\left( {p,U} \right) = \mathop {\min }\limits_{r \in U} \left( {{\rm dist}\left( {p,r} \right)} \right) = \mathop {\min }\limits_{r \in U} \left| {p - r} \right|$$ (1) 定义 2[18]. 图
$G$ 为结构平衡图当且仅当节点集$V$ 可分成两个非空集合${V_1}$ 和${V_2}$ , 并满足以下条件:1)
${V_1} \cup {V_2} = V,{V_1} \cap {V_2} = \emptyset $ ;2)若
$\forall i,j \in {V_q}\left( {q \in \left\{ {1,2} \right\}} \right)$ , 则所有权重${a_{ij}} \geq 0$ ;3)若
$\forall i \in {V_q},j \in {V_r},q \ne r\left( {q,r \in \left\{ {1,2} \right\}} \right)$ , 则所有权重${a_{ij}} \leq 0$ .1.2 规范变换
引入一类正交矩阵
$\mathcal{C}$ , 其定义如下:$$\mathcal{C} = \{ {C} = {\rm{diag}}\left\{ {{\sigma _1},{\sigma _2}, \cdots ,{\sigma _n}} \right\}, {\sigma _i} = \{ - 1,1\} \} .$$ 易得,
${C}$ 满足${{C}^{\rm{T}}}{C} = {C}{{C}^{\rm{T}}} = {I}$ , 且${{C}^{ - 1}} = {C}$ .${\rm{diag}}\left\{ {{\sigma _1},{\sigma _2}, \cdots ,{\sigma _n}} \right\}$ 表示对角矩阵, 其对角线元素为$\left\{ {{\sigma _1},{\sigma _2}, \cdots ,{\sigma _n}} \right\}$ . 对于固定无向网络拓扑和零通信时延的多智能体系统, 常采用控制协议${\boldsymbol{\dot x}}(t) = $ $ {\boldsymbol{u}}(t) = - L{\boldsymbol{x}}\left( t \right)$ , 对其规范变换. 令${\boldsymbol{z}} = C{\boldsymbol{x}}$ ,${C} \in \mathcal{C}$ , 由${{C}^{ - 1}} = {C}$ ,${\boldsymbol{x}} = C{\boldsymbol{z}}$ , 则$${\boldsymbol{\dot z}} = - {{L}_{D}}{\boldsymbol{z}}$$ (2) 其中,
${{L}_{D}} = {CLC} = {D} - {CAC}$ 为规范变换后拉普拉斯矩阵,$${l_{d,ij}} = \left\{ {\begin{aligned} &{\sum\limits_{j = 1}^n {\left| {{a_{ij}}} \right|} }\ ,&{i = j} \\ &{ - {\sigma _i}{\sigma _j}{a_{ij}}}\ , &{i \ne j} \end{aligned}} \right.$$ (3) 引理 1[18].
${L}$ 与${{L}_{D}}$ 等谱, 即具有相同的特征值集合$sp\left( {L} \right) = sp\left( {{{L}_{D}}} \right)$ .1.3 右端不连续微分方程与微分包含Filippov解
针对右端不连续微分方程, 在微分包含理论和菲利波夫解的框架基础下求全局解.考虑如下
$m$ 维微分方程$$\left\{ \begin{aligned} & \frac{{{\rm{d}}{\boldsymbol{x}}\left( t \right)}}{{{\rm{d}}t}} = f\left( {{\boldsymbol{x}}\left( t \right)} \right) \\ & {\boldsymbol{x}}\left( 0 \right) = {{x}_0} \end{aligned} \right.$$ (4) 其中
${\boldsymbol{x}}\left( t \right) = \left[ {{x_1}\left( t \right),{x_2}\left( t \right), \cdots ,{x_n}\left( t \right)} \right] \in {{\bf{R}}^m}$ ,$f:{\bf{R}} \times $ $ {{\bf{R}}^m} \to {{\bf{R}}^m}$ 为勒贝格可测函数且本性局部有界.如果
${\boldsymbol{x}}\left( t \right)$ 在$\left[ {0,T} \right)$ 绝对连续, 且满足微分包含$$\begin{split} &\frac{{{\rm{d}}{\boldsymbol{x}}\left( t \right)}}{{{\rm{d}}t}} \in \mathcal{K}\left[ {f\left( {{\boldsymbol{x}}\left( t \right)} \right)} \right] = \\ &\qquad { \cap _{\delta > 0}}\left( {{ \cap _{v\left( D \right) = 0}} \ {\rm co}\left[ {f\left( {B\left( {{\boldsymbol{x}}\left( t \right),\delta } \right)\backslash D} \right)} \right]} \right) \end{split} $$ (5) 其中
$\mathcal{K}$ 是集值函数,${\rm co}\left( \Omega \right)$ 表示集合$\Omega $ 的凸闭包,${ \cap _{v\left( D \right) = 0}}$ 表示所有勒贝格测度为0的集合$D$ 的交集,$B\left( {{\boldsymbol{x}}\left( t \right),\delta } \right)$ 代表以${\boldsymbol{x}}\left( t \right)$ 为中心$\delta $ 为半径的闭球, 则称${\boldsymbol{x}}\left( t \right)$ 为右端不连续微分方程(4)的解, 也称为Filippov解.函数
$H:{{\bf{R}}^m} \times \left[ {0,T} \right) \to \bf{R}$ 满足局部李普希茨条件,$H$ 在$\left( {{\boldsymbol{x}}\left( t \right),t} \right)$ 上广义梯度定义为$$\begin{split} &\partial H\left( {{\boldsymbol{x}}\left( t \right),t} \right) = {\rm {co}}\left\{ {\left. {\lim \nabla H\left( {{\boldsymbol{x}}\left( t \right),t} \right)} \right|} \right. \\ &\qquad \left. {\left( {{x_i}\left( t \right),{t_i}} \right) \to \left( {{\boldsymbol{x}}\left( t \right),t} \right),\left( {{x_i}\left( t \right),{t_i}} \right) \notin {\Omega _H}} \right\} \end{split} $$ 其中集合
${\Omega _H}$ 测度为0且$\nabla H\left( {{\boldsymbol{x}}\left( t \right),t} \right)$ 不存在.1.4 问题陈述
考虑包含
$n$ 个智能体的系统, 智能体$i$ 的动力学方程为$${\dot x_i}(t) = {u_i}(t) \, , \begin{array}{*{20}{c}} {}&{} \end{array}i = 1,2, \cdots ,n $$ (6) 其中
${x_i}(t) \in \bf{R}$ 表示智能体$i$ 的位置状态变量,${u_i}(t) \in $ $ \bf{R}$ 表示智能体$i$ 的控制输入.定义 3. 给定的控制器
${u_i},i = 1,2, \cdots ,n$ , 若对任意初始值${x_i}(0),i = 1,2, \cdots ,n$ , 都存在一个不依赖任何全局信息和初始值的正数$\varepsilon $ , 使得$$\mathop {\lim }\limits_{t \to \infty } \left( {\left| {{x_i}\left( t \right)} \right| - \left| {{x_j}\left( t \right)} \right|} \right) \leq \varepsilon \, , \begin{array}{*{20}{c}} {}&{} \end{array}\forall \varepsilon > 0$$ (7) 则称系统(6)能实现二分实用一致.
2. 通信受限的多智能体系统二分实用一致性
针对多智能体系统(6), 提出如下控制器,
$$\begin{split} {u_i}\left( t \right) = \;& \sum\limits_{j = 1}^n {{a_{ij}}} \left[ {\left( {Q\left( {{x_j}\left( {t - \tau } \right)} \right) - } \right.} \right.{\rm{sign}}\left( {{a_{ij}}} \right) \cdot \\ &\left. {\left. {Q\left( {{x_i}\left( t \right)} \right)} \right)} \right] \end{split} $$ (8) 其中
$Q\left( x \right)$ 为量化函数, 定义$Q\left( x \right) = \lfloor \left( {x/\eta \gamma } \right) + 0.5 \rfloor \gamma$ ,$i = 1,2, \cdots ,n$ ,$\gamma $ 为量化水平参数,$\eta \in \left( {0,1} \right]$ 为量化器精度,$\tau $ 为智能体$j$ 向智能体$i$ 通信传输时发生的通信延迟,$\left\lfloor \cdot \right\rfloor $ 为向下取整函数,${\rm{sign}}\left( \cdot \right)$ 为符号函数.本文讨论的是有向强连通符号图下多智能体系统二分实用一致性问题, 系统邻接矩阵中存在负元素, 由式(2)得变换后的邻接矩阵为,
$${c_{ij}} = \left\{ {\begin{array}{*{20}{c}} 0\ ,&{i = j} \\ {{\sigma _i}{\sigma _j}{a_{ij}}}\ ,&{i \ne j} \end{array}} \right.$$ (9) 其中
${\sigma _i},{\sigma _j} = \left\{ { - 1,1} \right\}$ .上述量化器是将连续状态空间映射到离散信息符号码集合, 智能体状态仅取整数, 在控制器(8)作用下, 系统(6)本质上是一个右端不连续的非光滑系统, 其解需要在菲利波夫意义下讨论.
定义 4. 如果函数
${\boldsymbol{x}}\left( t \right):\left[ { - \tau ,T} \right) \to {{\bf{R}}^n}$ 满足:1)
${\boldsymbol{x}}\left( t \right)$ 在$\left[ { - \tau ,T} \right)$ 连续, 在$\left[ {0,T} \right)$ 绝对连续;2)存在可测向量函数
${\boldsymbol{w}}\left( t \right) = \left[ {{w_1}\left( t \right),} \right.$ ${w}_{2}(t),\cdots , $ $ {w}_{n}(t)]: [-\tau , T)\to {\bf{R}}^{n}$ 、${{\boldsymbol{w}}'}( t ) = [ {{{w'}_1}( t )}$ $,{{w}^{\prime }}_{2}\left(t\right),\cdots , $ $ {{w}^{\prime }}_{n}\left(t\right)]: \left[-\tau , T\right)\to {\bf{R}}^{n}$ 使得${\boldsymbol{x}}\left( t \right)$ 在$t \in \left[ {0,T} \right)$ 有$$\frac{{{\rm{d}}{x_i}}}{{{\rm{d}}t}} = \sum\limits_{j = 1}^n {{c_{ij}}\left( {{{w'_j}}\left( {t - \tau } \right) - {w_i}\left( t \right)} \right)}\ , \;\;\; i = 1,2, \cdots ,n$$ (10) 其中
${w_i}( t ) \in \mathcal{K}[ {{\rm{sign}}( {{a_{ij}}} )Q( {{x_i}( t )} )} ]$ 、${w'_i}( t ) \in \mathcal{K}$ $\left[ {Q\left( {{x_i}\left( t \right)} \right)} \right]$ 是关于解${\boldsymbol{x}}\left( t \right)$ 的输出函数, 则称${\boldsymbol{x}}\left( t \right)$ 为系统(6)在$\left[ {0,T} \right)$ 上的Filippov解.定义 5. 给定连续向量函数
${\boldsymbol {\phi}} \left( t \right):\left[ { - \tau ,0} \right] \to {{\bf{R}}^n}$ , 可测向量函数${\boldsymbol {\psi}} \left( t \right) \in \mathcal{K}\left[ {Q\left( {\phi \left( t \right)} \right)} \right]:\left[ { - \tau ,0} \right] \to$ ${{\bf{R}}^n}$ 、${\boldsymbol {\psi}} ' \left( t \right) \in\mathcal{K}\left[ {{\rm{sign}}\left( {{a_{ij}}} \right)Q\left( {{\boldsymbol {\phi}} \left( t \right)} \right)} \right]:\left[ { - \tau ,0} \right] \to$ ${{\bf{R}}^n}$ , 如果$\exists T > 0$ , 使得在$\left[ {0,T} \right)$ 上${\boldsymbol{x}}\left( t \right)$ 为系统(6)的解, 且满足$$\left\{ \begin{aligned} & {{\dot x}_i}\left( t \right) = \sum\limits_{j = 1}^n {{c_{ij}}\left( {{{w'_j}}\left( {t - \tau } \right) - {w_i}\left( t \right)} \right)}\ ,\ t \in \left[ {0,T} \right) \ , \\ &\qquad\qquad\qquad\quad\qquad\qquad\qquad{i = 1,2, \cdots ,n} \\ &{\boldsymbol{x}}\left( t \right) = {\boldsymbol {\phi}} \left( t \right)\ ,\ t \in \left[ { - \tau ,0} \right) \\ &{\boldsymbol{w}}\left( t \right) = {\boldsymbol {\psi}} \left( t \right)\ ,\ t \in \left[ { - \tau ,0} \right) \\ &{{\boldsymbol{w}}'}\left( t \right) = {\boldsymbol {\psi}} '\left( t \right)\ ,\ t \in \left[ { - \tau ,0} \right) \end{aligned} \right.$$ (11) 则
$\left[ {{\boldsymbol{x}}\left( t \right),{\boldsymbol{w}}\left( t \right),{{\boldsymbol{w}}'}\left( t \right)} \right]:\left[ { - \tau ,T} \right) \to {{\bf{R}}^n} \times {{\bf{R}}^n}$ 为系统(6)满足初始条件$\left( {{\boldsymbol {\phi}} \left( t \right),{\boldsymbol {\psi}} \left( t \right),{\boldsymbol {\psi}} '\left( t \right)} \right)$ 的解.定理 1. 对任意初始向量函数
${\boldsymbol {\phi}} \left( t \right)$ 和任意可测向量输出函数${\boldsymbol {\psi}} \left( t \right)$ 、${\boldsymbol {\psi}} '\left( t \right)$ , 系统(11)存在全局解.证明. 1)局部解的存在性
基于参考文献[2]对引理1的证明, 易得系统(11)在
$\left[ {0,T} \right)$ 上存在局部解. 依据泛函微分方程理论, 通过局部解的有界性可得存在全局解. 故进一步证明局部解的有界性.2)设系统(11)的解为
$\left[ {{\boldsymbol{x}}\left( t \right),{\boldsymbol{w}}\left( t \right),{{\boldsymbol{w}}'}\left( t \right)} \right]:$ $[ - \tau , $ $ T ) \to {{\bf{R}}^n} \times {{\bf{R}}^n}$ , 令$$\begin{split} &Y\left( t \right) = {\max _{i \in n}}\left( {{{\max }_{\lambda \in \left[ { - \tau ,0} \right]}}{x_i}\left( {t + \lambda } \right)} \right) \\ &y\left( t \right) = {\min _{i \in n}}\left( {{{\min }_{\lambda \in \left[ { - \tau ,0} \right]}}{x_i}\left( {t + \lambda } \right)} \right) \end{split} $$ (12) 若能证明
$Y\left( t \right)$ 对$t$ 为非增函数,$y\left( t \right)$ 对$t$ 为非减函数, 则上述解有界. 我们将利用反证法证明该解的有界性. 首先分四步证明$Y\left( t \right)$ 对$t$ 为非增函数.假设
$Y\left( t \right)$ 是增函数,$\exists 0 < {t_0} < {t_1} \in \left[ {0,T} \right)$ , 使得$Y\left( {{t_0}} \right) < Y\left( {{t_1}} \right)$ .第1步: 证明
$\exists {t_2} \in \left[ {{t_0},{t_1}} \right],Y\left( {{t_2}} \right) = Y\left( {{t_0}} \right)$ , 且有$\forall t \in \left( {{t_2},{t_1}} \right]$ ,$Y\left( t \right) > Y\left( {{t_2}} \right)$ .令
${t_2} = \sup \left\{ {t \in \left[ {{t_0},{t_1}} \right]:Y\left( t \right) = Y\left( {{t_0}} \right)} \right\}$ , 则有$Y\left( {{t_2}} \right) = $ $ Y\left( {{t_0}} \right)$ .假设
$\exists {t_3} \in \left( {{t_2},{t_1}} \right]$ ,$Y\left( {{t_3}} \right) \leq Y\left( {{t_2}} \right)$ .$Y\left( t \right)$ 为增函数,$Y\left( {{t_1}} \right) > Y\left( {{t_0}} \right)$ , 由介值定理,$\exists {t_4} \in \left( {{t_3},{t_1}} \right] \subseteq \left( {{t_2},{t_1}} \right]$ , 使得$Y\left( {{t_4}} \right) = Y\left( {{t_0}} \right)$ .这与
${t_2}$ 定义相矛盾, 上述假设不成立. 故有,$\exists {t_2} \in \left[ {{t_0},{t_1}} \right],Y\left( {{t_2}} \right) = Y\left( {{t_0}} \right)$ , 且有$$Y\left( t \right) > Y\left( {{t_2}} \right)\ ,\begin{array}{*{20}{c}} {}&{}&{} \end{array}\forall t \in \left( {{t_2},{t_1}} \right]$$ (13) 第2步: 推导
$\exists {i^*} \in n,\alpha > 0,t \in \left[ {{t_2},{t_2} + \alpha } \right)$ , 有$Y\left( t \right) = {x_{{i^*}}}\left( {t + \lambda \left( t \right)} \right)$ ,$\lambda \left( t \right) \in \left[ { - \tau ,0} \right]$ . 令${Y'_i}\left( t \right) = $ $ {\max _{\lambda \in \left[ { - \tau ,0} \right]}}\left( {{x_i}\left( {t + \lambda \left( t \right)} \right)} \right) = {x_i}\left( {t + \lambda \left( t \right)} \right)$ , 由函数连续性可得,$Y\left( t \right) = {\max _{i \in n}}\left( {{Y'_i}\left( t \right)} \right)$ .因此
$\exists {i^*} \in n$ ,$\alpha > 0$ , 当$t \in \left[ {{t_2},{t_2} + \alpha } \right)$ , 使得$Y\left( t \right) =$ ${Y'_{{i^*}}}\left( t \right)$ . 即$Y\left( t \right) = {x_{{i^*}}}\left( {t + \lambda \left( t \right)} \right)$ ,$\lambda \left( t \right) \in \left[ { - \tau ,0} \right]$ .第3步: 证明
$\lambda \left( {{t_2}} \right) = 0$ .设
$t = {t_2}$ ,$\lambda \left( {{t_2}} \right) \ne 0$ ,$$Y\left( {{t_2}} \right) = {Y'_{{i^*}}}\left( {{t_2}} \right){\rm{ = }}{x_{{i^{\rm{*}}}}}\left( {{t_{\rm{2}}} + \lambda \left( t \right)} \right) > {x_{{i^{\rm{*}}}}}\left( {{t_{\rm{2}}}} \right)$$ 令
$\kappa \left( t \right) = {x_{{i^*}}}\left( {{t_2} + \lambda \left( {{t_2}} \right)} \right) - {x_{{i^*}}}\left( t \right),\kappa \left( {{t_2}} \right) > 0$ , 则有, 当$t \in \left[ {{t_2},{t_2} + \alpha '} \right),\alpha ' \in \left( {0,\alpha } \right)$ ,$${x_{{i^{\rm{*}}}}}\left( {{t_{\rm{2}}} + \lambda \left( {{t_{\rm{2}}}} \right)} \right) > {x_{{i^{\rm{*}}}}}\left( t \right)$$ (14) 由此, 当
$t \in \left[ {{t_2},{t_2} + \alpha '} \right),Y\left( t \right) \leq Y\left( {{t_2}} \right)$ . 这与第1步所得结论相矛盾, 上述假设不成立.故有, 当$t = {t_2}$ 时,$\lambda \left( {{t_2}} \right) = 0$ ,$Y\left( {{t_2}} \right) = {x_{{i^*}}}\left( {{t_2}} \right)$ .第4步: 证明
$Y\left( t \right)$ 对$t$ 为非增函数. 若对连续函数${x_{{i^*}}}\left( t \right),{x_{{i^*}}}\left( {{t_2}} \right) \ne \left( {\theta + 0.5} \right)\gamma \eta $ ,$\theta $ 为正整数,$\exists \alpha '' < \alpha '$ ,$\forall t \in \left( {{t_2},{t_2} + \alpha ''} \right)$ , 使得${x_{{i^*}}}\left( t \right) \ne \left( {\theta + 0.5} \right)\gamma \eta , $ $ {w'_{{i^*}}}\left( t \right) = {w'_{{i^*}}}\left( {{t_2}} \right) = Q\left( {{x_{{i^*}}}\left( {{t_2}} \right)} \right),$ ${w_{{i^*}}}\left( t \right) = {w_{{i^*}}}\left( {{t_2}} \right) = $ $\sum\nolimits_{j = 1}^n {\left( {{\rm{sign}}\left( {{a_{ij}}} \right)Q\left( {{x_{{i^*}}}\left( {{t_2}} \right)} \right)} \right)}. $ 由
$Y\left( {{t_2}} \right) = {x_{{i^*}}}\left( {{t_2}} \right)$ , 则${x_j}\left( {{t_2} - \tau } \right) \leq {x_{{i^*}}}\left( {{t_2}} \right)$ .又因
$Q\left( \cdot \right)$ 为非递减函数,$\exists \alpha ''' \in \left( {0,\alpha ''} \right)$ , 对$t \in \left( {{t_2},{t_2} + \alpha '''} \right)$ , 有${w'_j}\left( {t - \tau } \right) \leq {w_{{i^*}}}\left( t \right)$ , 则$${\dot x_{{i^*}}}\left( t \right) = \sum\limits_{j = 1}^n {{a_{ij}}\left( {{{w'_j}}\left( {t - \tau } \right) - {w_{{i^*}}}\left( t \right)} \right)} \leq 0$$ (15) 由式(14),
$\exists {t_5} \in \left( {{t_2},{t_2} + \alpha '''} \right)$ ,${x_{{i^*}}}\left( {{t_5}} \right) > {x_{{i^*}}}\left( {{t_2}} \right)$ , 则必须存在集合$\left( {{t_2},{t_5}} \right)$ 的子集${\Omega _1}$ ,${\Omega _1}$ 有正测度, 且${\dot x_{{i^*}}}\left( t \right) > 0$ . 这与式(15)矛盾.若
${x_{{i^*}}}\left( {{t_2}} \right) = \left( {\theta + 0.5} \right)\gamma \eta $ , 由上述分析, 对$\forall \alpha ''$ ,$\exists {t_6} \in \left( {{t_2},{t_2} + \alpha ''} \right]$ 使得${x_{{i^*}}}\left( {{t_6}} \right) > {x_{{i^*}}}\left( {{t_2}} \right)$ .令
${t_7} = \sup \left\{ {t \in \left[ {{t_2},{t_6}} \right]:{x_{{i^*}}}\left( t \right) = {x_{{i^*}}}\left( {{t_2}} \right)} \right\}$ , 由${x_{{i^*}}}\left( t \right)$ 函数连续性,${t_2} \leq {t_7} < {t_6}$ ,${x_{{i^*}}}\left( {{t_7}} \right) = $ ${x_{{i^*}}}\left( {{t_2}} \right)$ .因此, 对
$\forall t \in ( {{t_7},{t_6}} ]$ , 有${x_{{i^*}}}( t ) \geq Y( {{t_2}} )$ , 且${x_{{i^*}}} ( t ) \ne $ $ ( {\theta + 0.5} )\gamma \eta$ .与上同理, 由
${x_{{i^*}}}\left( {{t_7}} \right) > {x_{{i^*}}}\left( {{t_6}} \right)$ , 必须存在集合$\left( {{t_7},{t_6}} \right]$ 的一个子集${\Omega _2}$ ,${\Omega _2}$ 有正测度, 且${\dot x_{{i^*}}}\left( t \right) > 0$ . 这与式(15)矛盾.得证,
$Y\left( t \right)$ 对$t$ 为非增函数. 同理, 可证得$y\left( t \right)$ 对$t$ 为非减函数.可得, 对
$\forall i \in n$ , 有$y\left( 0 \right) \leq {x_i}\left( t \right) \leq Y\left( 0 \right)$ , 系统(11)的局部解$\left[ {{\boldsymbol{x}}\left( t \right),{\boldsymbol{w}}\left( t \right),} \right.\left. {{{\boldsymbol{w}}'}\left( t \right)} \right]$ 有界.由此, 系统(11)存在全局解. □
定理 2. 假设多智能体系统的固定有向通信拓扑
$G$ 为强连通符号图, 考虑存在通信时延和量化数据通信约束的多智能体系统(6), 在控制器(8)的作用下, 系统在任意初始条件下均能实现二分实用一致, 即$$\mathop {\lim }\limits_{t \to \infty } \left( {\left| {{x_i}\left( t \right)} \right| - \left| {{x_j}\left( t \right)} \right|} \right) \leq \varepsilon $$ (16) 其中,
$\forall \varepsilon > 0$ .证明. 构造如下Lyapunov函数:
$$\begin{split} V {\rm{ = }}\;& {V_1} + {V_2} =\\ & \sum\limits_{i = 1}^n {\int_0^{{x_i}\left( t \right)} {\left( {Q\left( t \right) + {\rm{sign}}\left( {{a_{ij}}} \right)Q\left( t \right)} \right){\rm{d}}t} } + \\ & \frac{1}{2}\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\int_{t - \tau }^t {{c_{ij}}\left( {{w_j^2}{{\left( t \right)}} + {{w'_j}^2}{{\left( t \right)}}} \right){\rm{d}}t} } } \end{split} $$ (17) 求导有
$$\begin{split} \frac{{{\rm{d}}{V_1}}}{{{\rm{d}}t}} =\;& \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\left( {Q\left( {{x_i}\left( t \right)} \right){{\dot x}_i}\left( t \right)} \right.} } + \\ &\left. {{\rm{sign}}\left( {{a_{ij}}} \right)Q\left( {{x_i}\left( t \right)} \right){{\dot x}_i}\left( t \right)} \right) =\\ & \sum\limits_{i = 1}^n {{w_i}\left( t \right)\sum\limits_{j = 1}^n {{c_{ij}}\left[ {{{w'_j}}\left( {t - \tau } \right) - {w_i}\left( t \right)} \right]} } + \\ & \sum\limits_{i = 1}^n {{{w'_j}}\left( t \right)\sum\limits_{j = 1}^n {{c_{ij}}\left[ {{w_i}\left( {t - \tau } \right) - {{w'_j}}\left( t \right)} \right]} } =\\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}\left[ {{w_i}\left( t \right){{w'_j}}\left( {t - \tau } \right) - w^2_i\left( t \right)} \right]} } + \\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}\left[ {{{w'_j}}\left( t \right){w_i}\left( {t - \tau } \right) - {{w'_j}}^2\left( t \right)} \right]} }= \\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } \left[ {2{w_i}\left( t \right){{w'_j}}\left( {t - \tau } \right) - } \right.\left. {2w^2_i\left( t \right)} \right] + \\ &\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } \left[ {2{{w'_j}}\left( t \right){w_i}\left( {t - \tau } \right) - } \right.\left. {2{{w'_j}}^2\left( t \right)} \right] \end{split} $$ (18) $$\begin{split} \frac{{{\rm{d}}{V_2}}}{{{\rm{d}}t}} =\;&\frac{1}{2}\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}} } \left[ {{{\left( {{w_j}\left( t \right)} \right)}^2} - {{\left( {{w_j}\left( {t - \tau } \right)} \right)}^2} + } \right. \\ &\left. {{{\left( {{{w'_j}}\left( t \right)} \right)}^2} - {{\left( {{{w'_j}}\left( {t - \tau } \right)} \right)}^2}} \right] =\\ & \frac{1}{2}\sum\limits_{j = 1}^n {\sum\limits_{i = 1}^n {{c_{ji}}\left[ {{{\left( {{w_i}\left( t \right)} \right)}^2} - {{\left( {{w_i}\left( {t - \tau } \right)} \right)}^2}} \right]} } + \\ & \frac{1}{2}\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}\left[ {{{\left( {{{w'_j}}\left( t \right)} \right)}^2} - {{\left( {{{w'_j}}\left( {t - \tau } \right)} \right)}^2}} \right]} } = \\ & \frac{1}{2}\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}} } \left[ {{{\left( {{w_i}\left( t \right)} \right)}^2} - {{\left( {{w_i}\left( {t - \tau } \right)} \right)}^2} + } \right. \\ &\left. {{{\left( {{{w'_j}}\left( t \right)} \right)}^2} - {{\left( {{{w'_j}}\left( {t - \tau } \right)} \right)}^2}} \right] \\[-10pt] \end{split} $$ (19) 从而有,
$$\begin{split} \frac{{{\rm{d}}V}}{{{\rm{d}}t}} = \;& \frac{{{\rm{d}}{V_1}}}{{{\rm{d}}t}} + \frac{{{\rm{d}}{V_2}}}{{{\rm{d}}t}} =\\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } \left[ {2{w_i}\left( t \right){{w'_j}}\left( {t - \tau } \right) - } \right.\left. {2w^2_i\left( t \right)} \right] + \\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } \left[ {2{{w'_j}}\left( t \right){w_i}\left( {t - \tau } \right) - } \right.\left. {2{{w'_j}}^2\left( t \right)} \right] + \\ &\frac{1}{2}\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}} } \left[ {{{\left( {{w_i}\left( t \right)} \right)}^2} - {{\left( {{w_i}\left( {t - \tau } \right)} \right)}^2} + } \right. \\ & \left. {{{\left( {{{w'_j}}\left( t \right)} \right)}^2} - {{\left( {{{w'_j}}\left( {t - \tau } \right)} \right)}^2}} \right]= \\ & - \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } {\left( {{w_i}\left( t \right) - {{w'_j}}\left( {t - \tau } \right)} \right)^2} - \\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } {\left( {{{w'_j}}\left( t \right) - {w_i}\left( {t - \tau } \right)} \right)^2} \leq 0 \\[-10pt] \end{split} $$ (20) 由式(20)得,
$V\left( t \right)$ 对$t$ 为非增函数,$V\left( t \right) > 0$ ,${\lim _{t \to \infty }}V\left( t \right) = 0$ 存在, 因此多智能体系统能实现稳定.令
${a_1} = {\max _{1 \leq i \leq j \leq n}}{c_{ij}}$ ,$\forall \varepsilon > 0$ ,$\exists {T_0}$ 使得$\forall t \geq $ $ {T_0}$ ,$\rho \in \left[ {0,\tau } \right]$ $$\begin{split} \frac{{{\varepsilon ^2}}}{{2n{a_1}\tau }} \ge\;& \left| {V\left( {t + \rho } \right) - V\left( t \right)} \right| = \left| {\int_t^{t + \rho } {\dot V\left( x \right){\rm{d}}x} } \right|=\\ & \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {\frac{1}{2}{c_{ij}}} } \cdot \Bigg[ {\int_t^{t + \rho } \Big({{{\left( {{w_i}\left( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right)}^2}} } + \\ & {{\left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right)^2 \Big)}{\rm{d}}x} \Bigg] \end{split}$$ 则
$$\begin{split} &{\varepsilon ^2} \ge \tau n\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}} } \cdot {a_1}\Bigg[ {\int_t^{t + \rho }\Big( {{{\left( {{w_i}\left(( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right)}^2}} } + \\ &\quad \left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right)^2\Big){\rm{d}}x \Bigg] \ge \\ &\quad \rho n\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}} } \cdot {a_1}\left[ {\int_t^{t + \rho } \Big({{{\left( {{w_i}\left( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right)}^2}} } \right. + \\ &\quad \left. {\left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right)^2\Big){\rm{d}}x} \right] \ge \\ &\quad n{\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} ^2} \cdot \left[ {{{\left( {\int_t^{t + \rho }{\left( {{w_i}\left( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right){\rm{d}}x} } \right)}^2}} \right.+\\ &\quad \left. { {{\left( {\int_t^{t + \rho } {\left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right){\rm{d}}x} } \right)}^2}} \right] \ge \end{split}$$ $$\begin{split} &{\left( {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {\left( {{w_i}\left( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right){\rm{d}}x} } \right)} \right)^2} + \\ &{\left( {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {{{\left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right)}^2}{\rm{d}}x} } \right)} \right)^2} \ge \\ &\quad {\left| {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {\left( {{w_i}\left( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right){\rm{d}}x} } \right)} \right|^2} + \\ &\quad {\left| {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {{{\left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right)}^2}{\rm{d}}x} } \right)} \right|^2} \end{split}$$ 从而有,
$$\begin{split} \varepsilon \ge \;& \left| {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {\left( {{w_i}\left( x \right) - {{w'_j}}\left( {x - \tau } \right)} \right){\rm{d}}x} } \right)} \right| + \\ &\left| {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {\left( {{{w'_j}}\left( x \right) - {w_i}\left( {x - \tau } \right)} \right){\rm{d}}x} } \right)} \right| \end{split}$$ (21) 再由式(21)可得,
$$\begin{split} & \left| {{x_i}\left( {t + \rho } \right)} \right| - \left| {{x_i}\left( t \right)} \right| \le \left| {{x_i}\left( {t + \rho } \right) - {x_i}\left( t \right)} \right|=\\ & \left| {\int_t^{t + \rho } {{{\dot x}_i}\left( z \right){\rm{d}}z} } \right|=\\ & \left| {\int_t^{t + \rho } {\sum\limits_{j = 1}^n {{c_{ij}}} \cdot \left( {{w_j}\left( {z - \tau } \right) - {{w'}_i}\left( z \right)} \right){\rm{d}}z} } \right| \le \\ & \left| {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {\left( {{w_i}\left( z \right) - {{w'_j}}\left( {z - \tau } \right)} \right){\rm{d}}z} } \right)} \right| + \\ &\left| {\sum\limits_{j = 1}^n {\left( {{a_{ij}}} \right)} \cdot \left( {\int_t^{t + \rho } {{{\left( {{{w'_j}}\left( z \right) - {w_i}\left( {z - \tau } \right)} \right)}^2}{\rm{d}}z} } \right)} \right| \le \varepsilon \end{split}$$ 由此, 对
$\forall \varepsilon > 0$ ,$\exists {T_0}$ 使得$\forall t \geq {T_0}$ ,$\rho \in \left[ {0,\tau } \right]$ $$\left| {{x_i}\left( {t + \rho } \right)} \right| - \left| {{x_i}\left( t \right)} \right| \leq \varepsilon $$ (22) 进一步假设存在集合
${ E} = \{ {| {{\boldsymbol{x}}( {t + \lambda } )} |} \in \mathcal{C}( [ { - \tau ,0}); $ $ {{\bf{R}}^n} ):( {{w_i}( t ) - }$ ${ {{{w'_j}}( {t - \tau } )} )^2} + {{( {{{w'_j}}( t ) - {w_i}( {t - \tau } )} )}^2} \leq $ ${{( {{\gamma /{n + 1}}} )}^2} \} $ , 对$\forall t' \ge 0$ ,$\exists t'' \geq t'$ 使得系统中所有智能体都能在$t''$ 收敛至集合${ E}$ . 令$${M} = \left\{ {t \geq t':\left| {{\boldsymbol{x}}\left( {t + \lambda } \right)} \right| \notin { E}} \right\}.$$ 对
$\left| {{\boldsymbol{x}}\left( {t + \lambda } \right)} \right| \in \mathcal{C}\left( {\left[ { - \tau ,0} \right];{{\bf{R}}^n}} \right)$ ,$t \in {M}$ , 使$( {w_i}( t ) - $ $ {{w'_j}}( {t - \tau } ))^2 + {( {{{w'_j}}( t ) - {w_i}( {t - \tau } )} )^2} \geq$ ${\left( {{\gamma /{n + 1}}} \right)^2}$ , 有$$\begin{split} \dot V\left( t \right) \leq\;& - \frac{1}{2}\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{c_{ij}}{{\left( {{\gamma /{n + 1}}} \right)}^2}} } \leq \\ &-\frac{1}{2}\left( {{{{c_{ij}}}/{{{\left( {n + 1} \right)}^2}}}} \right){\gamma ^2} \leq - \frac{1}{2}\chi {\gamma ^2} \end{split} $$ (23) 其中,
$\chi = {{\min \left( {{c_{ij}}} \right)}/{{{\left( {n + 1} \right)}^2}}}$ .假设,
$t \in {M}$ , 对$\forall t' \geq 0$ ,$$V\left( t \right) - V\left( {t'} \right) \leq - \frac{1}{2}\chi {\gamma ^2}\left( {t - t'} \right)$$ (24) 对
$t > \left( {{{2V\left( {t'} \right)}/({\chi {\gamma ^2}}}}) \right) + t'$ , 由式(24)得$V\left( t \right) < 0$ , 这与$V\left( t \right)$ 的定义相矛盾. 由此, 对$\forall t' \geq 0$ ,$\exists t'' \geq t'$ 使所有智能体能在$t''$ 收敛至集合${E}$ .由
$Q\left( {{x_i}} \right) = \left\lfloor {\left( {{x_i}\left( t \right)/(\gamma \eta) } \right) + 0.5} \right\rfloor \gamma$ ,$$\begin{split} &{\cal K}\left[ {Q\left( {{x_i}\left( t \right)} \right)} \right] = \\ &\left\{ \begin{aligned} &{\gamma {\theta _1}} ,&{{x_i}\left( t \right) \in \left[ {\left( {{\theta _1} - 0.5} \right)\gamma \eta , \left( {\theta_1 + 0.5} \right)\gamma \eta } \right)} \\ &\gamma \left( {{\theta _1} + 1} \right), & {x_i}\left( t \right) = \left( {{\theta _1} + 0.5} \right)\gamma \eta \qquad\qquad\qquad\;\; \end{aligned} \right. \end{split}$$ 其中
${\theta _1} \in \bf{Z}$ .又由
${w_i}\left( {t''} \right) \in \mathcal{K}\left[ {{\rm{sign}}\left( {{a_{ij}}} \right)Q\left( {{x_i}\left( {t''} \right)} \right)} \right]$ 、${w'_i}\left( {t''} \right) \in $ $ \mathcal{K}$ $\left[ {Q\left( {{x_i}\left( {t''} \right)} \right)} \right]$ , 易得$\exists {\theta _{ij}} \in \bf{Z}$ , 使得$$\left\{ \begin{aligned} &{x_i}\left( {t'} \right) \in \left[ {\left( {{\theta _{ij}} - 0.5} \right)\gamma \eta ,\left( {{\theta _{ij}} + 0.5} \right)\gamma \eta } \right] \\ &{x_j}\left( {t' - \tau } \right) \in \left[ {\left( {{\theta _{ij}} - 0.5} \right)\gamma \eta ,\left( {{\theta _{ij}} + 0.5} \right)\gamma \eta } \right] \end{aligned} \right.$$ (25) 由于所考虑的网络为强连通图, 对任意智能体
$i$ 到其邻居智能体$i'$ 、${i^{\rm{*}}}$ 有不超过$n - 1$ 条路径.结合上述分析, 可得$$\left\{ \begin{aligned} &\left| {{w_i}\left( {t'} \right) - {{w'}_{i'}}\left( {t' - \tau } \right)} \right| < \left( {{{n - 1}/{n + 1}}} \right)\gamma \\ &\left| {{w_i}\left( {t'} \right) - {{w'}_{{i^{\rm{*}}}}}\left( {t' - \tau } \right)} \right| < \left( {{n/{n + 1}}} \right)\gamma \end{aligned} \right.$$ (26) 因此, 对
$\forall t' \geq 0$ ,$\exists t''$ , 使得任意一个智能体$i$ 的状态${x_i}\left( {t''} \right) \in \left[ {\left( {\theta - 0.5} \right)\gamma \eta ,\left( {\theta + 0.5} \right)\gamma \eta } \right]$ .由定理1的证明知,
$Y\left( t \right)$ 为非增函数,$y\left( t \right)$ 为非减函数, 由式(12), 存在${i_M},{\lambda _M},{i_m},{\lambda _m}$ , 使得$$\left\{ \begin{aligned} & Y\left( {t''} \right) = {x_{{i_M}}}\left( {t'' + {\lambda _M}} \right) \\ & y\left( {t''} \right) = {x_{{i_m}}}\left( {t'' + {\lambda _m}} \right) \end{aligned} \right.$$ 设
${x_{{i_M}}}\left( {t''} \right) \in \left[ {\left( {\theta - 0.5} \right)\gamma \eta ,\left( {\theta + 0.5} \right)\gamma \eta } \right]$ ,${x_{{i_m}}}( t'' - $ $ \tau ) \in \left[ {\left( {\theta - 0.5} \right)\gamma \eta ,\left( {\theta + 0.5} \right)\gamma \eta } \right]$ .由式(22)得,
$$\left\{ \begin{aligned} & Y\left( {t''} \right) - {x_{{i_M}}}\left( {t''} \right) \leq \varepsilon \\ & {x_{{i_m}}}\left( {t''} \right) - y\left( {t''} \right) \leq \varepsilon \end{aligned} \right.$$ 从而得,
$${x_{{i_m}}}\left( {t'' - \tau } \right) - \varepsilon \leq y\left( {t''} \right) \leq {x_{{i_M}}}\left( {t''} \right) + \varepsilon $$ 再由
$Y\left( t \right)$ 和$y\left( t \right)$ 的单调性可得, 对$\forall t \geq t''$ ,$$\begin{split} &{x_{{i_m}}} \left( {t'' - \tau } \right) - \varepsilon \leq y\left( {t''} \right) \leq y\left( t \right) \leq \\ &\qquad Y \left( t \right) \leq Y\left( {t''} \right) \leq {x_{{i_M}}}\left( {t''} \right) + \varepsilon \\ \end{split} $$ (27) 由式(1), 对
$\forall \varepsilon > 0$ , 有$${\rm {dist}}\left( {{x_i}\left( t \right),\left[ {\left( {\theta - 0.5} \right)\gamma \eta ,\left( {\theta + 0.5} \right)\gamma \eta } \right]} \right) \leq \varepsilon $$ (28) 由此可得, 对任意一个智能体
$i$ 的状态${x_i}\left( t \right)$ 都能收敛到集合$\left[ {\left( {\theta - 0.5} \right)\gamma \eta ,\left( {\theta + 0.5} \right)\gamma \eta } \right]$ 中. 由此可得,$$\begin{split} & \mathop {\lim }\limits_{t \to \infty } \left( {\left| {{x_i}\left( t \right)} \right| - \left| {{x_j}\left( t \right)} \right|} \right) \leq \varepsilon = \\ &\qquad \left| {\left( {\theta - 0.5} \right)\gamma \eta - \left( {\theta + 0.5} \right)\gamma \eta } \right| = \gamma \eta \end{split} $$ (29) □
3. 仿真实例
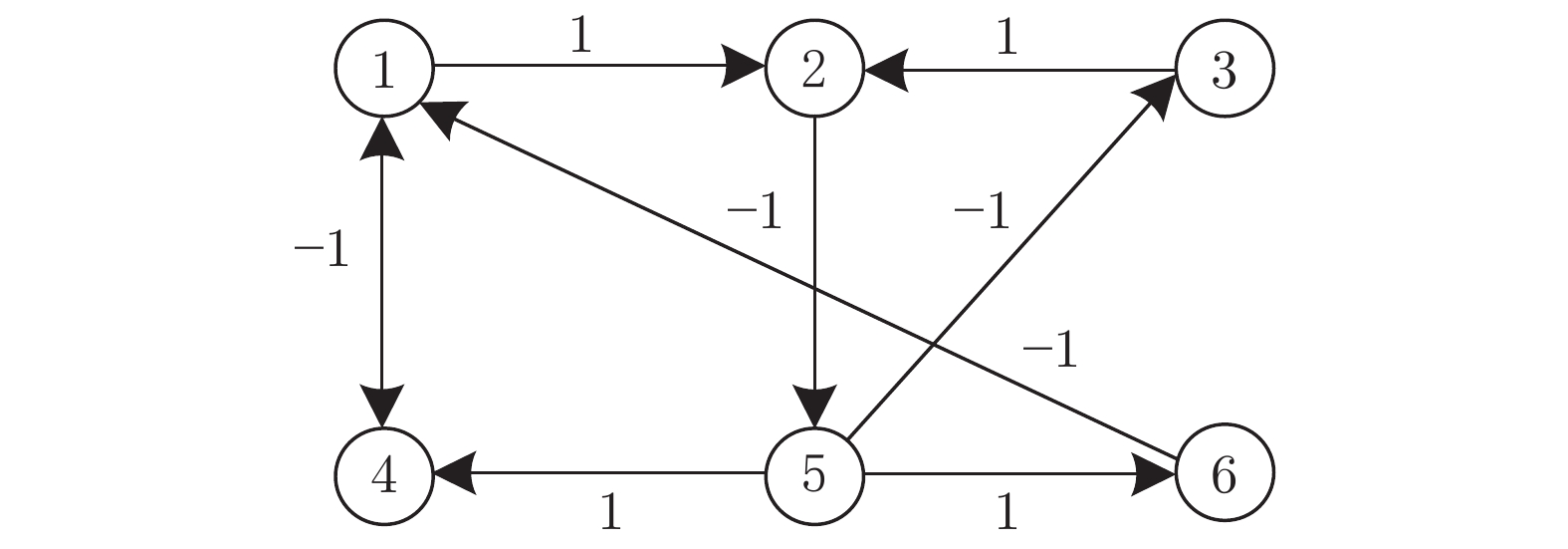
实例 1. 考虑由6个智能体构成的多智能体系统, 其有向通信拓扑结构如图1所示.该拓扑图满足结构平衡, 图中两个子群分别为
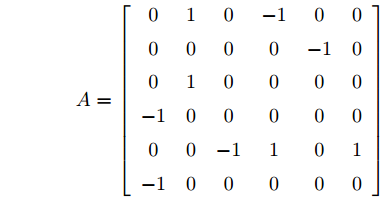
$ {V}_{1}=\left\{\rm{1}, \rm{2}, \rm{3}\right\}$ 和$ {V}_{2}=\left\{\rm{4}, \rm{5}, \rm{6}\right\}$ , 子群之间为竞争关系, 子群内部为合作关系.由通信拓扑图不难得到邻接矩阵
${A}$ , 对邻接矩阵${A}$ 规范变换, 取转换矩阵为${C} = {\rm{diag}}\{ 1,1,1, - 1, $ $ - 1, - 1 \}$ . 其中, 转换矩阵${C}$ 为正交矩阵,${C} = {\rm{diag}}\{ {\sigma _1}, $ $ {\sigma _2}, \cdots ,{\sigma _n} \},$ ${\sigma _i} = \{ - 1,1\} $ , 满足${{C}^{\rm{T}}}{C} = {C}{{C}^{\rm{T}}} = {I}$ ,${{C}^{ - 1}} = {C}$ ;${\rm{diag}}\left\{ {{\sigma _1},{\sigma _2}, \cdots ,{\sigma _n}} \right\}$ 表示对角矩阵, 其对角线元素为$\left\{ {{\sigma _1},{\sigma _2}, \cdots ,{\sigma _n}} \right\}$ .$${A} = \left[ {\begin{array}{*{20}{c}} 0&1&0&{ - 1}&0&0 \\ 0&0&0&0&{ - 1}&0 \\ 0&1&0&0&0&0 \\ { - 1}&0&0&0&0&0 \\ 0&0&{ - 1}&1&0&1 \\ { - 1}&0&0&0&0&0 \end{array}} \right]$$ 取
$\eta = 1$ ,$\gamma = {\rm{3}}$ ,$\tau = 0.1$ , 各智能体初始值${\boldsymbol{x}}\left( t \right) = [ 1\;\;{2.5}\;\;6\;\;{ - 1}\;\;{ - 4}\;\;{ - 3} ]$ ,$t \in \left[ { - 0.1,0} \right)$ . 由式(29)易得,$\mathop {\lim }_{t \to \infty } \left( {\left| {{x_i}\left( t \right)} \right| - \left| {{x_j}\left( t \right)} \right|} \right) = \gamma \eta = {\rm{3}}$ .图2为系统(6)在控制器(8)的作用下各智能体位置状态变化曲线, 由图可知各智能体位置状态绝对值的误差收敛于可控区间
$\left[ {0,{\rm{3}}} \right]$ , 存在竞争关系的两个子群最终能实现收敛, 即通信受限的多智能体系统能实现二分实用一致. 图 2
图 2$\gamma = 3,$ $\eta = 1$ 智能体位置状态轨迹Fig. 2$\gamma = 3,$ $\eta = 1$ The trajectories of all agents图3、图4为在相同初始值状态下分别取
$\gamma = {\rm{1}}$ 、$\gamma = {\rm{0}}{\rm{.1}}$ 时的各智能体位置状态曲线, 表明通过改变$\gamma $ 值可以控制智能体位置状态绝对值误差的波动区间, 所设计的$\gamma $ 值越小, 智能体位置状态绝对值的误差波动区间也越小.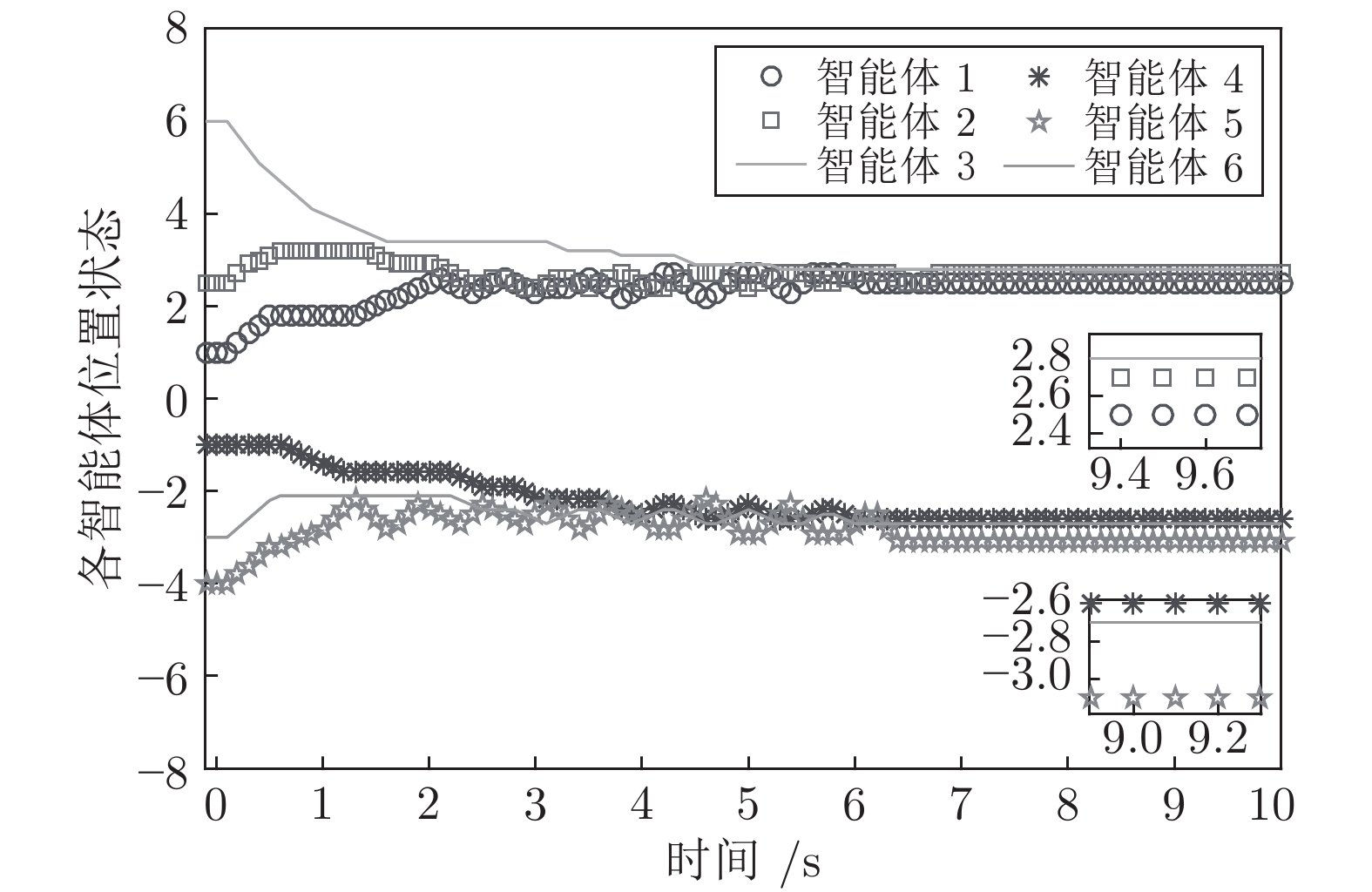 图 3
图 3$\gamma = 1,$ $\eta = 1$ 智能体位置状态轨迹Fig. 3$\gamma = 1,$ $\eta = 1$ The trajectories of all agents 图 4
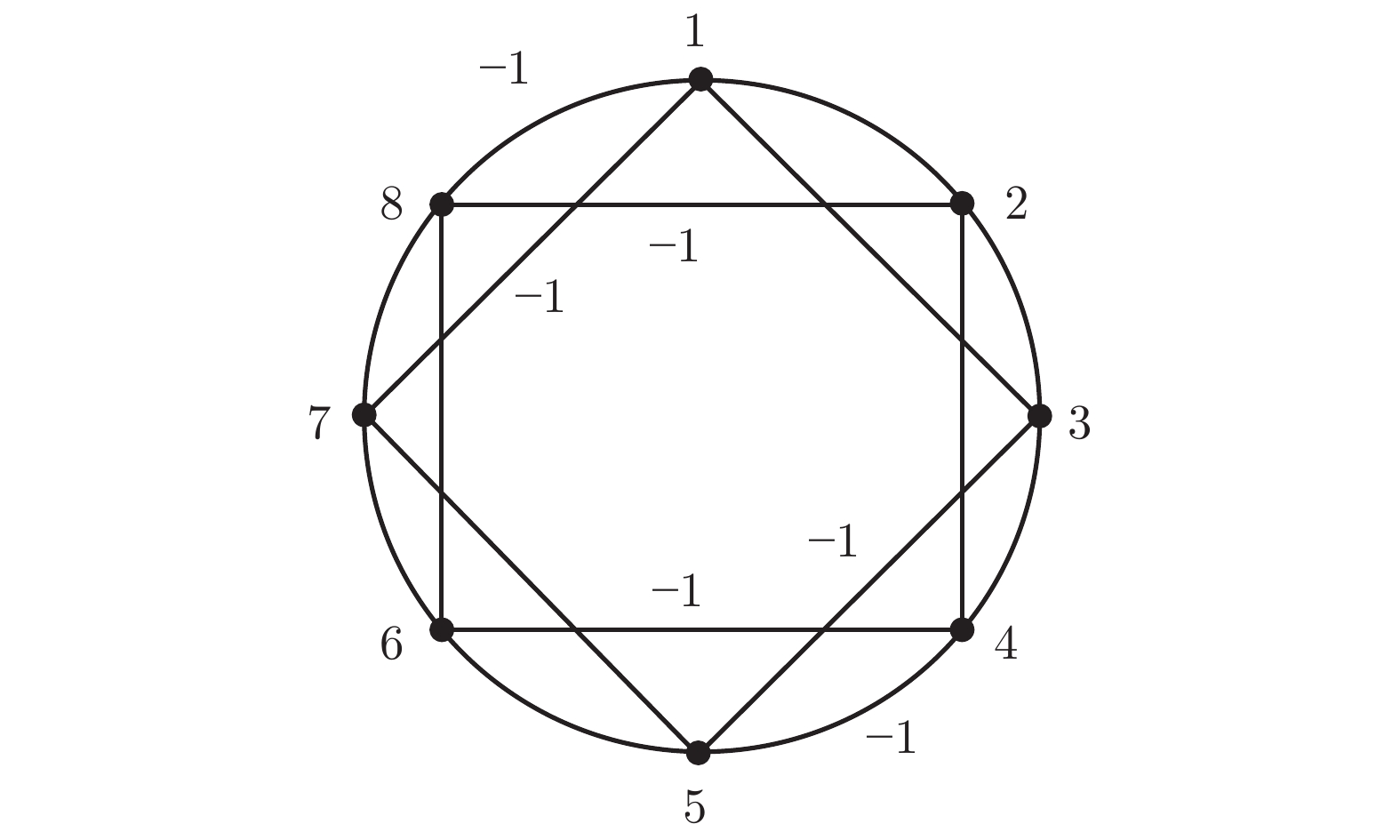
图 4$\gamma = 0.1,$ $\eta = 1$ 智能体位置状态轨迹Fig. 4$\gamma = 0.1,$ $\eta = 1$ The trajectories of all agents实例 2. 为了进一步说明本文的研究意义, 选用8个智能体组成的最邻近耦合小世界网络系统, 智能体互连构成的有向拓扑图如图5所示, 此处无向图为一种特殊的有向图, 图中未标权重的连边权重设为1. 其中, 两个子群
${V_1} = \left\{ {1,2,3,4} \right\}$ 、${V_2} = \{ 5,6, $ $ 7,8 \}$ , 取$\eta = 1$ ,$\gamma = {\rm{0}}{\rm{.5}}$ ,$\tau = 0.1$ , 智能体初始状态分别为${\boldsymbol{x}}\left( t \right) = [ 1\;\;2\;\;4\;\;5\;\;{ - 1}\;\;{ - 2}\;\;{ - 4}\;\;{ - 5} ]$ ,$t \in \left[ { - 0.1,0} \right)$ .对邻接矩阵
${A}$ 规范变换, 取转换矩阵为${C} = $ $ {\rm{diag}}\left\{ {1,1,1,1, - 1, - 1, - 1, - 1} \right\}$ . 由式(29)易得,$\mathop {\lim }_{t \to \infty } \left( {\left| {{x_i}\left( t \right)} \right| - \left| {{x_j}\left( t \right)} \right|} \right) \le \varepsilon = \gamma \eta = {\rm{0}}{\rm{.5}}$ .图6为系统(6)在控制器(8)的作用下各智能体位置状态变化曲线. 由图可知, 各智能体位置状态绝对值的误差收敛于可控区间
$\left[ {2.8,3.2} \right]$ , 存在竞争关系的两个子群最终能实现收敛, 运用本文所设计的控制策略, 最邻近耦合小世界网络系统能实现二分实用一致.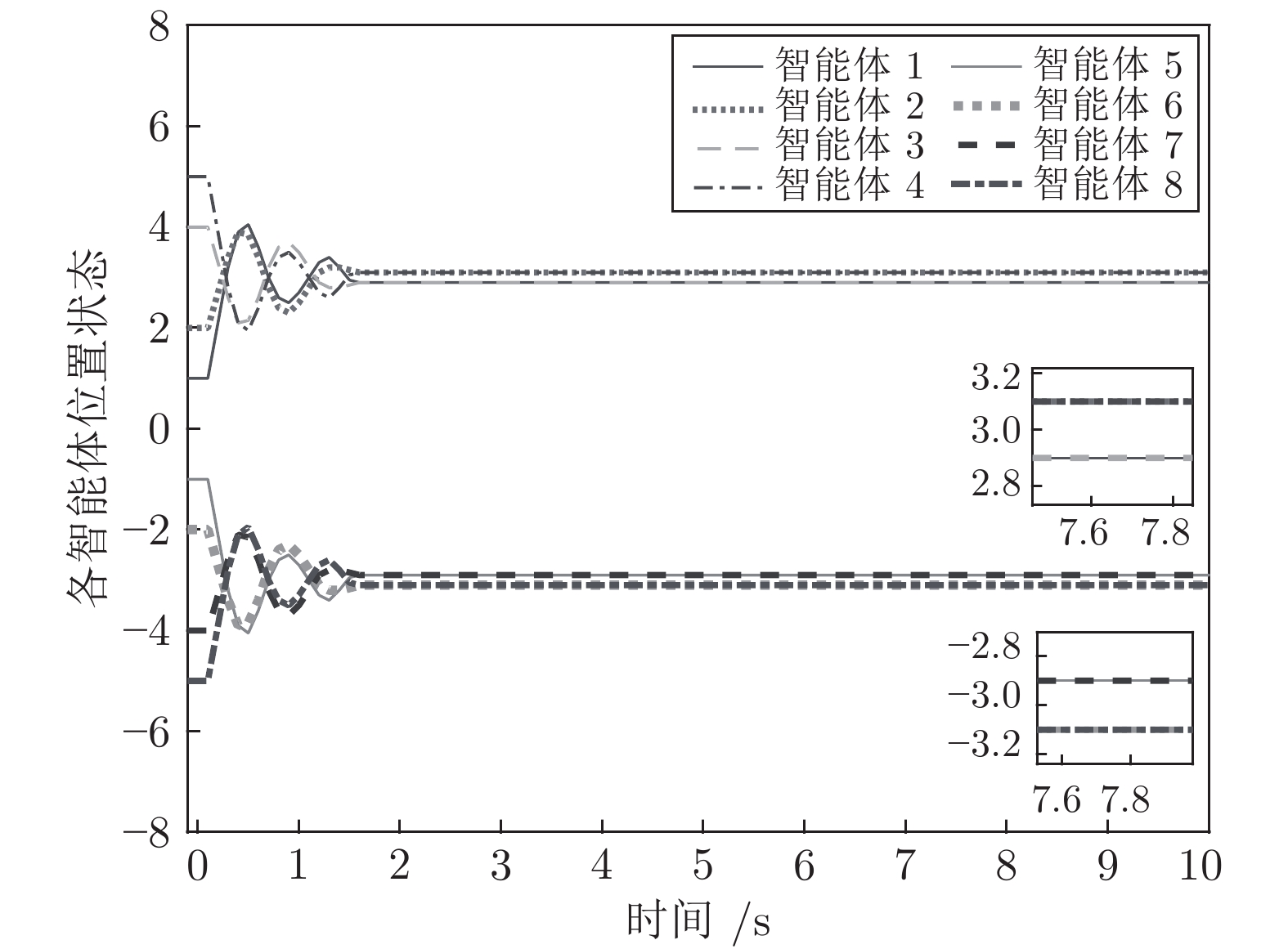 图 6
图 6$\gamma = 0.5,$ $\eta = 1$ 智能体位置状态轨迹Fig. 6$\gamma = 0.5,$ $\eta = 1$ The trajectories of all agents4. 结论
本文研究了有向强连通符号图下通信受限的多智能体子群系统二分实用一致性问题, 设计了一种基于量化器的分布式控制协议, 使智能体位置状态绝对值的误差收敛于可控区间, 并得到了误差收敛上界值, 该上界值不依赖于任何全局信息和初始状态, 仅与量化器参数有关, 所设计量化水平参数越小, 收敛区间也越小. 后续工作将考虑推广至离散系统和高阶系统.
-
图 2
$\gamma = 3,$ $\eta = 1$ 智能体位置状态轨迹Fig. 2
$\gamma = 3,$ $\eta = 1$ The trajectories of all agents
图 3
$\gamma = 1,$ $\eta = 1$ 智能体位置状态轨迹Fig. 3
$\gamma = 1,$ $\eta = 1$ The trajectories of all agents
图 4
$\gamma = 0.1,$ $\eta = 1$ 智能体位置状态轨迹Fig. 4
$\gamma = 0.1,$ $\eta = 1$ The trajectories of all agents -
[1] Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules[J]. IEEE Transactions on Automatic Control, 2003, 48(6): 988--1001. doi: 10.1109/TAC.2003.812781 [2] Forti M, Nistri P, Papini D. Global exponential stability and global convergence in finite time of delayed neural networks with infinite gain[J]. IEEE Transactions on Neural Networks, 2005, 16(6): 1449--1463. doi: 10.1109/TNN.2005.852862 [3] Yu W W, Chen G R, Cao M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems[J]. Automatica, 2010, 46(6): 1089--1095. doi: 10.1016/j.automatica.2010.03.006 [4] 陈世明, 化俞新, 祝振敏, 赖强. 邻域交互结构优化的多智能体快速蜂拥控制算法[J]. 自动化学报, 2015, 41(12): 2092--2099.Chen Shi-Ming, Hua Yu-Xin, Zhu Zhen-Min, Lai Qiang. Fast flocking algorithm for multi-agent systems by opti-mizing local interactive topology[J]. Acta Automatica Sinica, 2015, 41(12): 2092--2099. [5] Kim J M, Park J B, Choi Y H. Leaderless and leader-following consensus for heterogeneous multi-agent systems with random link failures[J]. Iet Control Theory and Applications, 2014, 8(1): 51--60. doi: 10.1049/iet-cta.2012.0855 [6] Ma Q, Wang Z, Miao G Y. Second-order group consensus for multi-agent systems via pinning leader-following approach[J]. Journal of The Franklin Institute-engineering and Applied Mathematics, 2014, 351(3): 1288--1300. doi: 10.1016/j.jfranklin.2013.11.002 [7] Roy S. Scaled consensus[J]. Automatica, 2015: 259--262. [8] Zhang Z, Chen S M, Su H S. Scaled Consensus of second-order nonlinear multiagent systems with time-varying delays via aperiodically intermittent control[J]. IEEE Transactions on Cybernetics, 2020, 50(8): 3503--3516. doi: 10.1109/TCYB.2018.2883793 [9] S. Chen, Z. Zhang and Y. Zheng, "H∞ Scaled Consensus for MASs With Mixed Time Delays and Disturbances via Observer-Based Output Feedback," in IEEE Transactions on Cybernetics, vol. 52, no. 2, pp. 1321-1334, Feb. 2022, doi: 10.1109/TCYB.2020.3001643. [10] Wang Z H, Xu J J, Zhang H S. Consensusability of multi-agent systems with time-varying communication delay[J]. Systems & Control Letters, 2014: 37--42. [11] Chen Y, Shi Y. Consensus for Linear Multiagent Systems With Time-Varying Delays: A Frequency Domain Perspective[J]. IEEE Transactions on Systems, Man, and Cybernetics, 2017, 47(8): 2143--2150. [12] Qiu Z R, Xie L H, Hong Y G. Quantized Leaderless and Leader-Following Consensus of High-Order Multi-Agent Systems With Limited Data Rate[J]. IEEE Transactions on Automatic Control, 2016, 61(9): 2432--2447. doi: 10.1109/TAC.2015.2495579 [13] Dong X W, Xi J X, Shi Z Y, Zhong Y S. Practical consensus for high-order linear time-invariant swarm systems with interaction uncertainties, time-varying delays ang external disturbances[J]. International Journal of systems Science, 2013, 44(10): 1843--1856. doi: 10.1080/00207721.2012.670296 [14] Bernuau E, Moulay E, Coirault P, Lsfoula F. Practical consensus of homogeneous sampled-data multiagent systems[J]. IEEE Transactions on Automatic Control, 2019, 64(11): 4691--4697. doi: 10.1109/TAC.2019.2904442 [15] Ning B, Han Q L, Zuo Z Y. Practical fixed-time consensus for integrator-type multi-agent systems: A time base generator approach[J]. Automatica, 2019, 105(105): 406--414. [16] Panteley E, Loria A, Elati A. Practical dynamic consensus of Stuart–Landau oscillators over heterogeneous networks[J]. International Journal of Control, 2020, 93(2): 261--273. doi: 10.1080/00207179.2018.1551618 [17] 张文, 马忠军, 王毅. 带未知耦合权重的领导-跟随多智能体系统的实用一致性[J]. 自动化学报, 2018, 44(12): 2300--2304.Zhang Wen, Ma Zhong-Jun, Wang Yi. Practical consensus of leader-following multi-agent system with unknown coupling weights[J]. Acta Automatica Sinica, 2018, 44(12): 2300--2304. [18] Altafini C. Consensus problems on networks with antagonistic interactions[J]. IEEE Transactions on Automatic Control, 2013, 58(4): 935--946. doi: 10.1109/TAC.2012.2224251 [19] Zhang H, Chen J. Bipartite consensus of multi-agent systems over signed graphs: State feedback and output feedback control approaches[J]. International Journal of Robust and Nonlinear Control, 2017, 27(1): 3--14. doi: 10.1002/rnc.3552 [20] Jiang Y, Zhang H W, Chen J. Sign-consensus of linear multi-agent systems over signed directed graphs[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5075--5083. doi: 10.1109/TIE.2016.2642878 [21] Meng D Y, Meng Z Y, Hong Y G. Uniform convergence for signed networks under directed switching topologies[J]. Automatica, 2018, 90: 8--15. doi: 10.1016/j.automatica.2017.12.028 [22] Pan L, Shao H, Mesbahi M, Li D. Bipartite consensus on matrix-valued weighted networks[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2018, 66(8): 1441--1445. [23] Su H S, Chen J H, Yang Y C. The bipartite consensus for multi-agent systems with matrix-weight-based signed network[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2019, 67(10): 2019--2023. [24] 翟世东, 刘佩, 高辉. 具有对抗关系和时变拓扑的耦合离散系统有界双向同步[J]. 自动化学报, 2020.Zhai Shi-Dong, Liu Pei, Gao Hui. Bounded bipartite synchronization for coupled discrete systems under antagonistic[J]. Acta Automatica Sinica, to be publication. 2020. [25] Akshay K, Tamer B, R. Srikant. Quantized consensus[J]. Automatica, 2007, 43: 1192--1203. doi: 10.1016/j.automatica.2007.01.002 [26] Dimarogonasa D V, Johansson K H. Stability analysis for multi-agent systems using the incidence martrix: Quantized communication and formation control[J]. Automatica, 2010, 46(4): 695--700. doi: 10.1016/j.automatica.2010.01.012 [27] Ceragioli F, Claudio D P, Paolo F. Discontinuities and hysteresis in quantized average consensus[J]. Automatica, 2011, 47(9): 1916--1928. doi: 10.1016/j.automatica.2011.06.020 [28] Zhu Y R, Li S L, Ma J Y, Zheng Y S. Bipartite consensus in networks of agents with antagonistic interactions and quantization[J]. IEEE Transactions on circuits and systems-express briefs, 2018, 65(12): 2012--2018. doi: 10.1109/TCSII.2018.2811803 [29] Wu J, Deng Q, Han T, Yan H C. Distributed bipartite tracking consensus of nonlinear multi-agent systems with quantized communication[J]. Neurocomputing, 2020. 395: 78--85. doi: 10.1016/j.neucom.2020.02.017 期刊类型引用(10)
1. 李菲,周超,范利蓉,王芳. 控制方向未知的受限多智能体系统的预设时间模糊控制. 工程科学学报. 2025(01): 121-129 .  百度学术
百度学术2. 蔡玉良,吕春慧,何强,于波,陈东岳,王友童,王强,刘宇轩,赵婧婧. 基于强化学习的完全分布式事件驱动二分一致性算法. 计算机科学. 2025(02): 279-290 . 百度学术3. 隆紫庭,马忠军,李科赞. 多智能体系统的实用-分量一致性. 广西师范大学学报(自然科学版). 2024(01): 139-146 . 百度学术4. 张善祺,刘兵,柴利. 基于从众行为的改进Hegselmann-Krause观点动力学分析. 控制与决策. 2024(03): 965-974 . 百度学术5. 高林庆,王超,哈登喆,耿华,侯帅. 领导-跟随混合阶异质多智能体系统的一致性. 河北大学学报(自然科学版). 2024(01): 104-112 . 百度学术6. 丁勐,陈蓓. 信道衰落下多智能体系统有限时间一致性控制. 电子科技. 2024(03): 44-50 . 百度学术7. 马小陆,谭毅波,梅宏. 符号图下含扰动的多智能体系统预定时间二分一致性. 控制与决策. 2024(05): 1517-1526 . 百度学术8. 任鸿儒,刘庆海,周琪,鲁仁全. 无人自主系统分布式协同控制研究综述. 广东工业大学学报. 2024(04): 1-13 . 百度学术9. 刘沛明,郭祥贵. 基于观测器的人在环多机械臂系统预设性能二分一致性. 自动化学报. 2024(09): 1761-1771 . 本站查看10. 辛红伟,李昊齐,祝国强,张秀宇. 基于自调节有限时间预设性能函数的多智能体系统动态面状态约束量化控制. 控制与决策. 2023(05): 1319-1326 . 百度学术其他类型引用(14)
-














































































































































































































































































































 下载:
下载:















































 下载:
下载:
计量
- 文章访问数: 1589
- HTML全文浏览量: 543
- PDF下载量: 336
- 被引次数: 24
