

Image Super-resolution Based on Multi-hierarchical Features Fusion Network
Author Bio:
LI Jin-Xin Master student at the School of Control and Computer Engineering, North China Electric Power University. He received his bachelor degree from Hebei University of Architecture in 2018. His research interest covers computer vision and deep learning
HUANG Zhi-Yong Master student at the School of Control and Computer Engineering, North China Electric Power University. He received his bachelor degree from North China Electric Power University in 2018. His research interest covers computer vision and deep learning
LI Wen-Bin Master student at the School of Control and Computer Engineering, North China Electric Power University. He received his bachelor degree from Shanghai University of Electric Power in 2017. His research interest covers computer vision and deep learning
ZHOU Deng-Wen Professor at the School of Control and Comput-er Engineering, North China Electric Power University. His main research interest is applications of neural network in image processing. Corresponding author of this paper



-
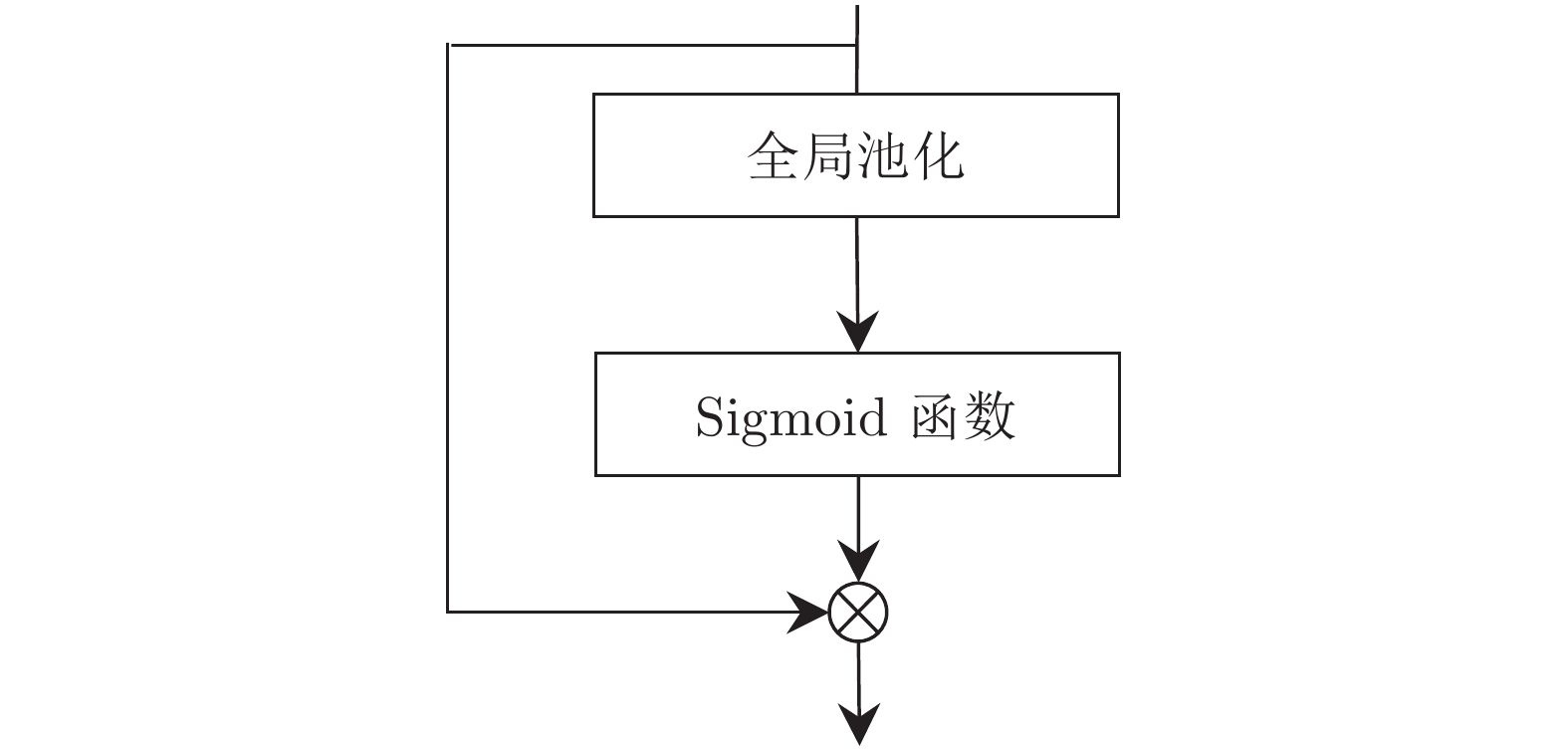
摘要: 深度卷积神经网络显著改进了单图像超分辨率的性能. 更深的网络往往能获得更好的性能. 但是, 加深网络会导致参数量急剧增加, 限制了它在资源受限设备上的应用, 比如智能手机. 提出了一个融合多层次特征的轻量级单图像超分辨率网络, 主要构件是双层嵌套残差块. 为了更好地提取特征, 减少参数量, 每个残差块采用对称结构: 先两次扩张, 然后两次压缩通道数. 在残差块中, 通过添加自相关权重单元, 加权融合不同通道的特征信息. 实验证明, 该方法显著优于当前同类方法.Abstract: Single image super-resolution based on deep convolutional neural network has made notable achievements. Deeper networks tend to get better performance. However, deepening the network will result in a sharp increase in the number of parameters, which limits its application in resource-constrained devices, such as mobile devices. In this paper, we propose a lightweight multi-hierarchical feature fusion network for single image super-resolution, whose main building blocks are the dual nested residual blocks. In order to better extract features and reduce the number of parameters as much as possible, the dual residual block uses an excite-and-squeeze structure. To better transfer feature information, we add auto-correlation weigh units to the dual nested residual block, which can weigh each channel according to the image feature information. Extensive experiments show that our method is significantly better than the existing methods.1) 1 该结构是将特征信息
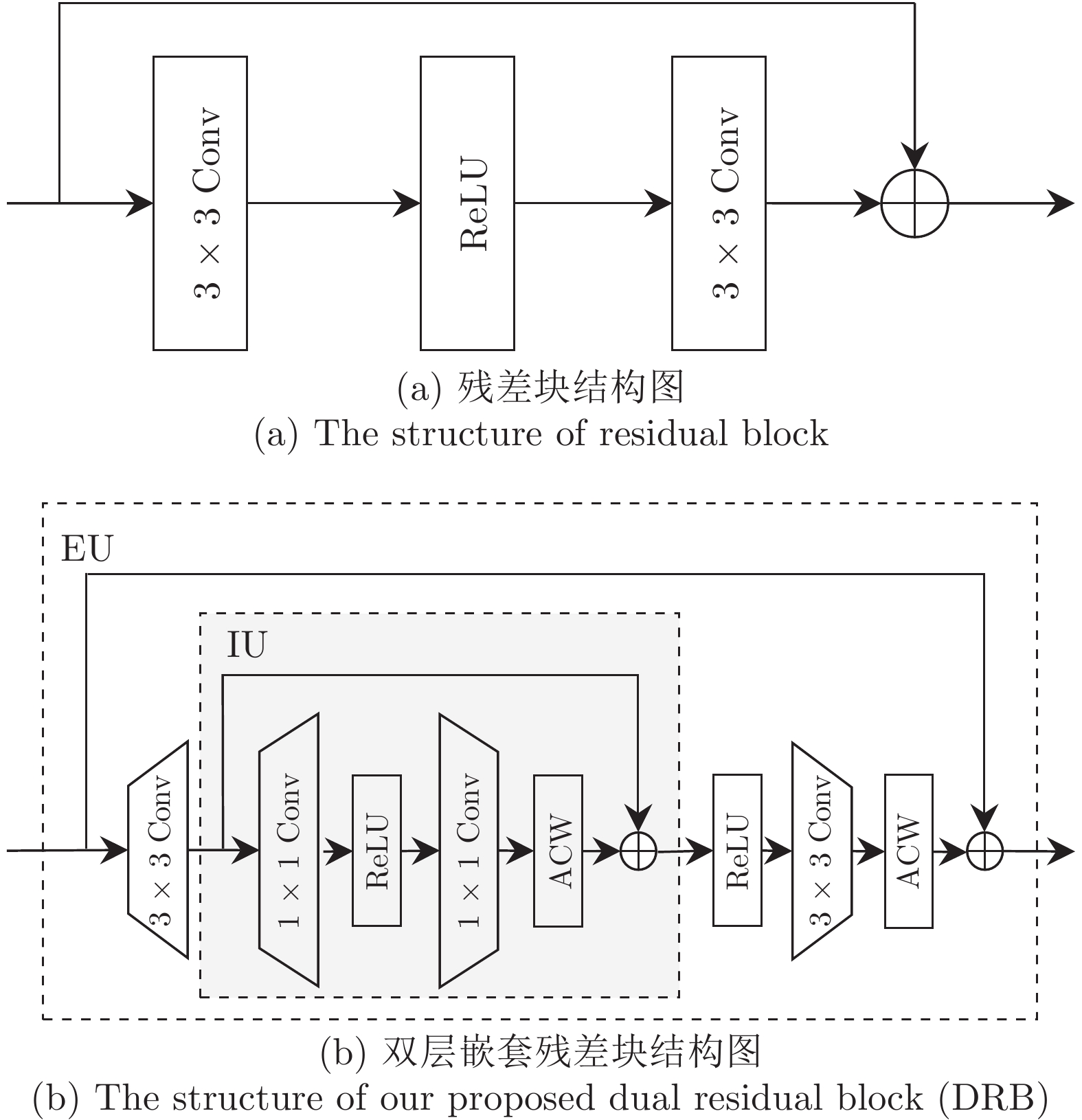
$ x $ 经过卷积处理再激活操作, 随后再次卷积处理得到$ \hat x $ , 结构最终输出为$ x+\hat x $ .2) 2https://github.com/thstkdgus35/EDSR-PyTorch -
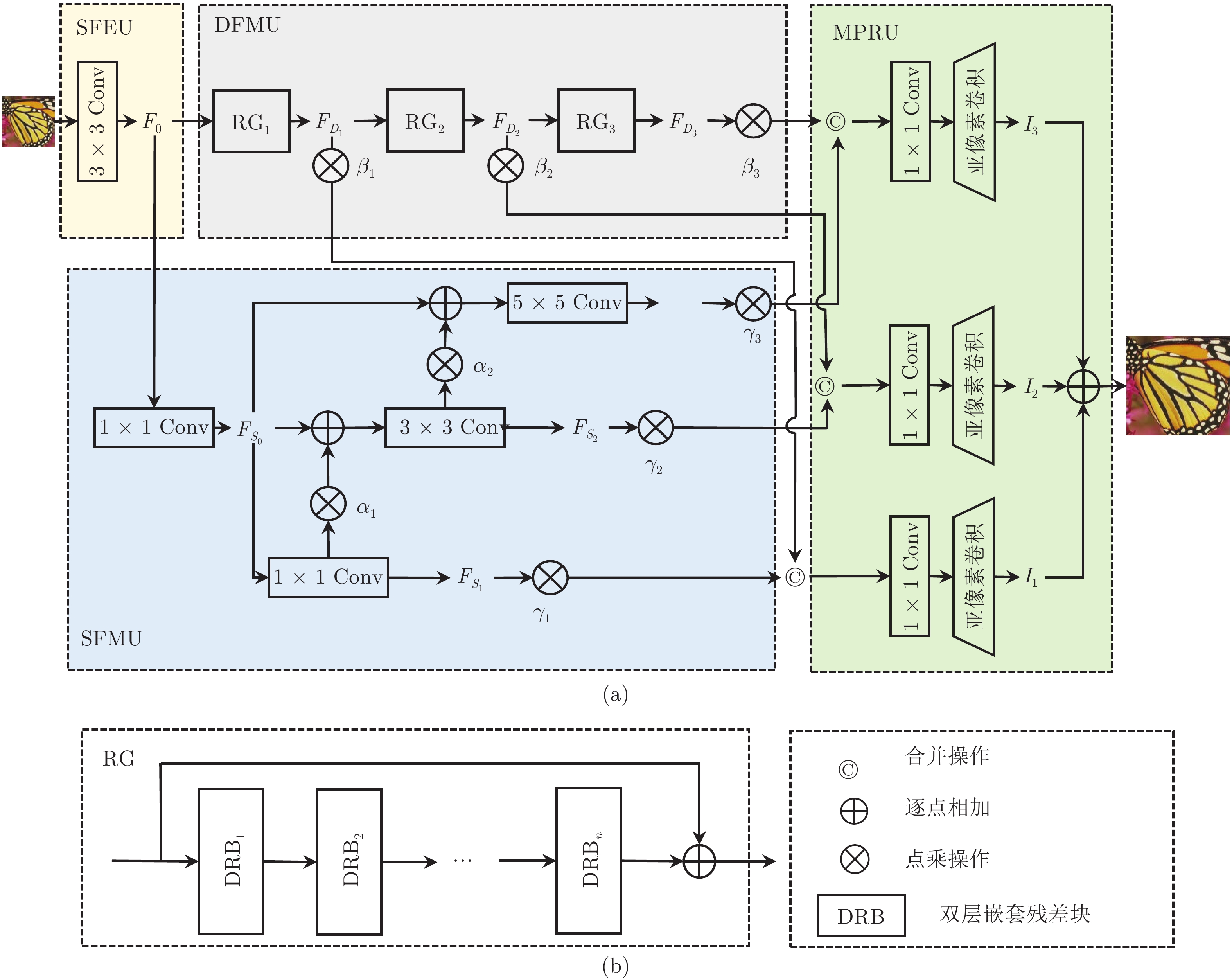
图 1 本文多层次特征融合网络结构与残差组结构((a) 多层次特征融合网络结构图; (b) 残差组结构图)
Fig. 1 Our multi-hierarchical feature fusion network structure and the residual group structure ((a) The architecture of multi hierarchical feature fusion network; (b) The structure of residual group)

图 4 标准测试集放大4倍视觉效果比较
Fig. 4 Visual qualitative comparison of
$\times $ 4 super-resolution on the standard test datasets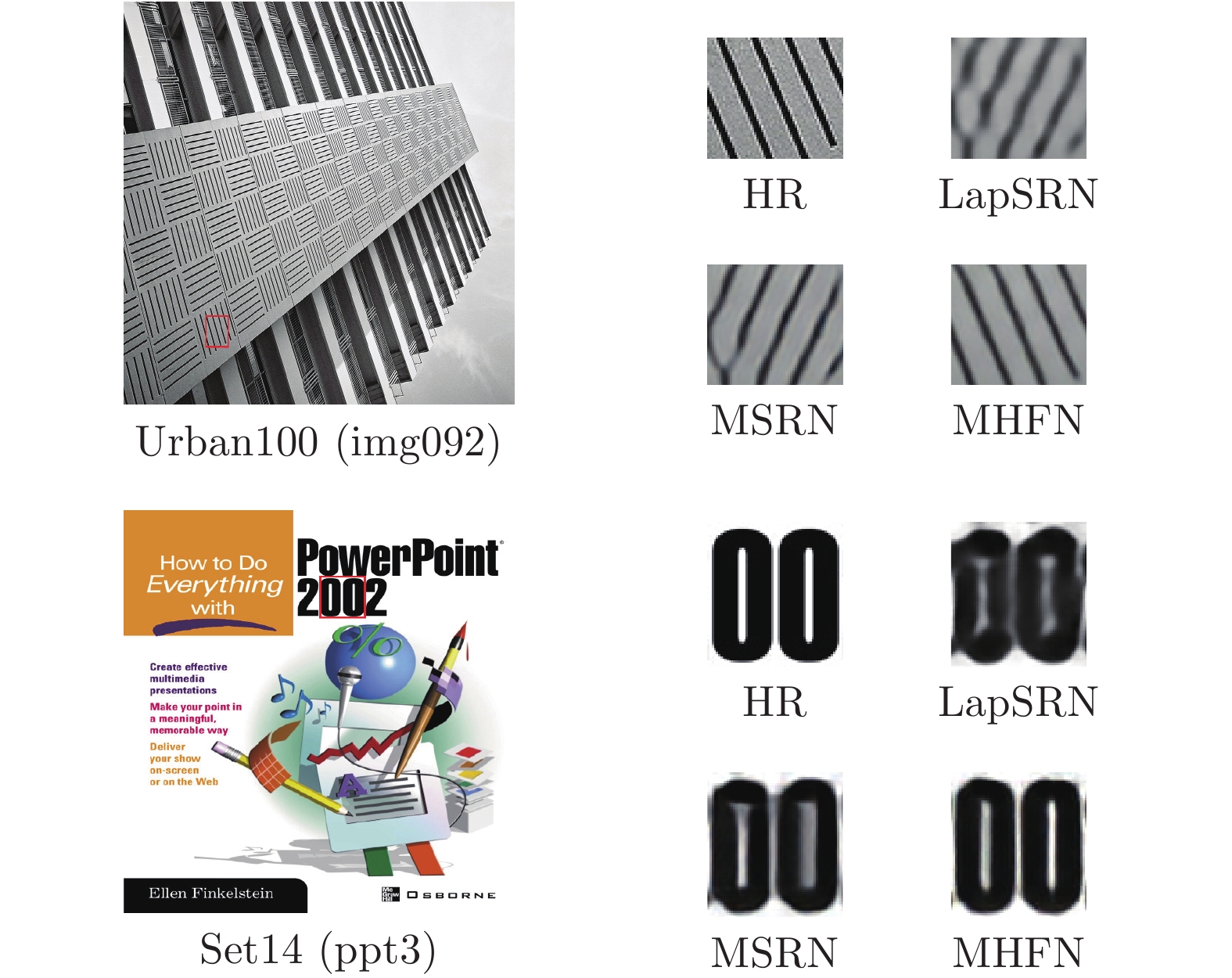
图 5 标准测试集下放大8倍视觉效果比较
Fig. 5 Visual qualitative comparison of
$\times $ 8 super-resolution on the standard test datasets表 1 Set5 和DIV2K-10 数据集上, 放大4倍, 运行200 个迭代周期, 残差组中不同双层嵌套残差块数模型的平均PSNR 及参数量
Table 1 Average PSNRs and number of parameter with different numbers of DRBs in the residual group with a factor of × 4 on Set5 and DIV2K-10 datasets under 200 epochs
数目 参数量 (MB) Set5 (%) DIV2K-10 (%) 5 1.23 32.23 29.51 6 1.47 32.26 29.55 7 1.71 32.25 29.55  下载: 导出CSV
下载: 导出CSV
表 2 Set5与DIV2K-10数据集上, 放大4倍, 运行200迭代周期, 浅层特征映射单元支路不同卷积核设置的平均PSNR
Table 2 Average PSNRs of the models with different convolutional kernel settings for SFMU branches for × 4 on Set5 and DIV2K-10 datasets under 200 epochs
卷积核设置 Set5 (%) DIV2K-10 (%) — 32.22 29.52 1 1 1 32.18 29.50 3 3 3 32.24 29.53 5 5 5 32.25 29.53 1 3 5 32.26 29.55
下载: 导出CSV
表 3 Set5与DIV2K-10数据集上, 放大4倍, 运行200个迭代周期, 不同模型的平均PSNR
Table 3 Average PSNRs of different models for × 4 super-resolution on Set5 and DIV2K-10 datasets under 200 epochs
测试模型 残差块参数量 (KB) Set5 (%) DIV2K-10 (%) 模型 I 73.8 32.11 29.42 模型 II 53.5 32.12 29.47
下载: 导出CSV
表 4 Set5和DIV2K-10 数据集上, 放大4 倍, 运行200个迭代周期, 包含/不包含ACW模型的平均PSNR
Table 4 Average PSNRs of the models with/without the ACW for × 4 super-resolution on the Set5 and DIV2K-10 datasets under 200 epochs
模型 Set5 (%) DIV2K-10 (%) 不包含 ACW 32.11 29.42 包含 ACW 32.13 29.45
下载: 导出CSV
表 5 Set5和DIV2K-10 数据集上, 放大4 倍, 运行200 个迭代周期, 不同重建单元模型的平均PSNR
Table 5 Average PSNRs of the models with different reconstruction modules for × 4 super-resolution on Set5 and DIV2K-10 datasets under 200 epochs
重建单元 参数量 (KB) Set5 (%) DIV2K-10 (%) EDSR 重建单元 297.16 32.11 29.42 MPRU 9.36 32.13 29.47
下载: 导出CSV
表 6 各个SISR方法的平均PSNR和SSIM
Table 6 The average PSNRs/SSIMs of different SISR methods
放大倍数 模型 参数量 (KB) Set14
PSNR (%)/SSIM (%)B100
PSNR (%)/SSIM (%)Urban100
PSNR (%)/SSIM (%)Manga109
PSNR (%)/SSIM (%)× 2 SRCNN 57 32.42/0.9063 31.36/0.8879 29.50/0.8946 35.74/0.9661 FSRCNN 12 32.63/0.9088 31.53/0.8920 29.88/0.9020 36.67/0.9694 VDSR 665 33.03/0.9124 31.90/0.8960 30.76/0.9140 37.22/0.9729 DRCN 1774 33.04/0.9118 31.85/0.8942 30.75/0.9133 37.63/0.9723 LapSRN 813 33.08/0.9130 31.80/0.8950 30.41/0.9100 37.27/0.9740 DRRN 297 33.23/0.9136 32.05/0.8973 31.23/0.9188 37.92/0.9760 MemNet 677 33.28/0.9142 32.08/0.8978 31.31/0.9195 37.72/0.9740 SRMDNF 1513 33.32/0.9150 32.05/0.8980 31.33/0.9200 38.07/0.9761 CARN 1592 33.52/0.9166 32.09/0.8978 31.92/0.9256 38.36/0.9765 MSRN 5930 33.70/0.9186 32.23/0.9002 32.29/0.9303 38.69/0.9772 SRFBN-S 282 33.35/0.9156 32.00/0.8970 31.41/0.9207 38.06/0.9757 CBPN 1036 33.60/0.9171 32.17/0.8989 32.14/0.9279 — IMDN 694 33.63/0.9177 32.19/0.8996 32.17/0.9283 38.88/0.9774 本文 MHFN 1463 33.79/0.9196 32.20/0.8998 32.40/0.9301 38.88/0.9774 ×3 SRCNN 57 29.28/0.8209 28.41/0.7863 26.24/0.7989 30.59/0.9107 FSRCNN 12 29.43/0.8242 28.53/0.7910 26.43/0.8080 30.98/0.9212 VDSR 665 29.77/0.8314 28.82/0.7976 27.14/0.8279 32.01/0.9310 DRCN 1774 29.76/0.8311 28.80/0.7963 27.15/0.8276 32.31/0.9328 DRRN 297 29.96/0.8349 28.95/0.8004 27.53/0.8378 32.74/0.9390 MemNet 677 30.00/0.8350 28.96/0.8001 27.56/0.8376 32.51/0.9369 SRMDNF 1530 30.04/0.8370 28.97/0.8030 27.57/0.8400 33.00/0.9403 CARN 1592 30.29/0.8407 29.06/0.8034 27.38/0.8404 33.50/0.9440 MSRN 6114 30.41/0.8437 29.15/0.8064 28.33/0.8561 33.67/0.9456 SRFBN-S 376 30.10/0.8372 28.96/0.8010 27.66/0.8415 33.02/0.9404 ×3 IMDN 703 30.32/0.8417 29.09/0.8046 28.17/0.8519 33.61/0.9445 本文 MHFN 1465 30.40/0.8428 29.13/0.8056 28.35/0.8557 33.85/0.9460 × 4 SRCNN 57 27.49/0.7503 26.90/0.7101 24.52/0.7221 27.66/0.8505 FSRCNN 12 27.59/0.7535 26.98/0.7150 24.62/0.7280 27.90/0.8517 VDSR 665 28.01/0.7674 27.29/0.7251 25.18/0.7524 28.83/0.8809 DRCN 1774 28.02/0.7670 27.23/0.7233 25.14/0.7510 28.98/0.8816 LapSRN 813 28.19/0.7720 27.32/0.7280 25.21/0.7560 29.09/0.8845 DRRN 297 28.21/0.7720 27.38/0.7284 25.44/0.7638 29.46/0.8960 MemNet 677 28.26/0.7723 27.40/0.7281 25.50/0.7630 29.42/0.8942 SRMDNF 1555 28.35/0.7770 27.49/0.7340 25.68/0.7730 30.09/0.9024 CARN 1592 28.60/0.7806 27.58/0.7349 26.07/0.7837 30.47/0.9084 MSRN 6078 28.63/0.7836 27.61/0.7380 26.22/0.7911 30.57/0.9103 SRFBN-S 483 28.45/0.7779 27.44/0.7313 25.71/0.7719 29.91/0.9008 CBPN 1197 28.63/0.7813 27.58/0.7356 26.14/0.7869 — IMDN 715 28.58/0.7811 27.56/0.7353 26.04/0.7838 30.45/0.9075 本文 MHFN 1468 28.66/0.7830 27.61/0.7371 26.27/0.7909 30.74/0.9114 × 8 SRCNN 57 23.86/0.5443 24.14/0.5043 21.29/0.5133 22.46/0.6606 FSRCNN 12 23.94/0.5482 24.21/0.5112 21.32/0.5090 22.39/0.6357 VDSR 655 23.20/0.5110 24.34/0.5169 21.48/0.5289 22.73/0.6688 DRCN 1774 24.25/0.5510 24.49/0.5168 21.71/0.5289 23.20/0.6686 LapSRN 813 24.45/0.5792 24.54/0.5293 21.81/0.5555 23.39/0.7068 MSRN 6226 24.88/0.5961 24.70/0.5410 22.37/0.5977 24.28/0.7517 本文 MHFN 1490 25.02/0.6426 24.80/0.5968 22.46/0.6170 24.60/0.7811
下载: 导出CSV
-
[1] Shi W Z, Caballero J, Ledig C, Zhuang X H, Bai W J, Bhatia K, et al. Cardiac image super-resolution with global correspondence using multi-atlas PatchMatch. In: Proceedings of the 16th International Conference on Medical Image Computing and Com-puter-Assisted Intervention. Nagoya, Japan: 2013. 9−16 [2] Luo Y M, Zhou L G, Wang S, Wang Z Y. Video satellite imagery super resolution via convolutional neural networks. IEEE Geoscience and Remote Sensing Letters, 2017, 14(12): 2398-2402 doi: 10.1109/LGRS.2017.2766204 [3] Zou W W W, Yuen P C. Very low resolution face recognition problem. IEEE Transactions on Image Processing, 2012, 21(1): 327-340 doi: 10.1109/TIP.2011.2162423 [4] 孙旭, 李晓光, 李嘉锋, 卓力. 基于深度学习的图像超分辨率复原研究进展. 自动化学报, 2017, 43(5): 697-709Sun Xu, Li Xiao-Guang, Li Jia-Feng, Zhuo Li. Review on deep learning based image super-resolution restoration algorithms. Acta Automatica Sinica, 2017, 43(5): 697-709 [5] 周登文, 赵丽娟, 段然, 柴晓亮. 基于递归残差网络的图像超分辨率重建. 自动化学报, 2019, 45(6): 1157-1165Zhou Deng-Wen, Zhao Li-Juan, Duan Ran, Chai Xiao-Liang. Image super-resolution based on recursive residual networks. Acta Automatica Sinica, 2019, 45(6): 1157-1165 [6] 张毅锋, 刘袁, 蒋程, 程旭. 用于超分辨率重建的深度网络递进学习方法. 自动化学报, 2020, 46(2): 274-282Zhang Yi-Feng, Liu Yuan, Jiang Cheng, Cheng Xu. A curriculum learning approach for single image super resolution. Acta Automatica Sinica, 2020, 46(2): 274-282 [7] Dong C, Loy C C, He K M, Tang X O. Learning a deep convolutional network for image super-resolution. In: Proceedings of the 13th European Conference on Computer Vision. Zurich, Swi-tzerland: 2014. 184−199 [8] Kim J, Kwon Lee J, Mu Lee K. Deeply-recursive convolutional network for image super-resolution. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: 2016. 1637−1645 [9] Tai Y, Yang J, Liu X M. Image super-resolution via deep recursive residual network. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: 2017. 2790−2798 [10] Ahn N, Kang B, Sohn K A. Fast, accurate, and lightweight super-resolution with cascading residual network. In: Proceedings of the 15th European Conference on Computer Vision. Munich, Germany: 2018. 256−272 [11] Li J C, Fang F M, Mei K F, Zhang G X. Multi-scale residual network for image super-resolution. In: Proceedings of the 15th European Conference on Computer Vision. Munich, Germany: 2018. 527−542 [12] Lim B, Son S, Kim H, Nah S, Lee K M. Enhanced deep residual networks for single image super-resolution. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops. Honolulu, USA: 2017. 1132−1140 [13] Zhang Y L, Tian Y P, Kong Y, Zhong B N, Fu Y. Residual dense network for image super-resolution. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: 2018. 2472−2481 [14] Lecun Y, Bottou L, Bengio Y, Haffner P. Gradient-based learning applied to document recognition. Proceedings of the IEEE, 1998, 86(11): 2278-2324 doi: 10.1109/5.726791 [15] Kim J, Kwon Lee J, Mu Lee K. Accurate image super-resolution using very deep convolutional networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: 2016. 1646−1654 [16] He K M, Zhang X Y, Ren S Q, Sun J. Deep residual learning for image recognition. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016. 770−778 [17] Li Z, Yang J L, Liu Z, Yang X M, Jeon G, Wu W. Feedback network for image super-resolution. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach, USA: 2019. 3862−3871 [18] Hui Z, Gao X B, Yang Y C, Wang X M. Lightweight image super-resolution with information multi-distillation network. In: Proceedings of the 27th ACM International Conference on Multimedia. Nice, France: 2019. 2024−2032 [19] Zhu F Y, Zhao Q J. Efficient single image super-resolution via hybrid residual feature learning with compact back-projection network. In: Proceedings of the IEEE/CVF International Conference on Computer Vision Workshop. Seoul, South Korea: 2019. 2453−2460 [20] Lai W S, Huang J B, Ahuja N, Yang M H. Deep laplacian pyramid networks for fast and accurate super-resolution. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: 2017. 5835−5843 [21] Timofte R, Agustsson E, van Gool L, Yang M H, Zhang L, Lim B, et al. NTIRE 2017 challenge on single image super-resolution: Methods and results. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops. Honolulu, USA: 2017. 1110−1121 [22] Liu J, Zhang W J, Tang Y T, Tang J, Wu G S. Residual feature aggregation network for image super-resolution. In: Proce-edings of the IEEE/CVF Conference on Computer Visi-on and Pattern Recognition. Seattle, USA: 2020. 2356−2365 [23] Zhang Y L, Li K P, Li K, Wang L C, Zhong B N, Fu Y. Image super-resolution using very deep residual channel attention networks. In: Proceedings of the 15th European Conference on Com-puter Vision. Munich, Germany: 2018. 294−310 [24] Sandler M, Howard A, Zhu M L, Zhmoginov A, Chen L C. MobileNetV2: Inverted residuals and linear bottlenecks. In: Proce-edings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: 2018. 4510− 4520 [25] Szegedy C, Ioffe S, Vanhoucke V, Alemi A A. Inception-v4, inception-ResNet and the impact of residual connections on learning. In: Proceedings of the 31st AAAI Conference on Artificial Intelligence. San Francisco, USA: 2017. 4278−4284 [26] Wang Z H, Chen J, Hoi S C H. Deep learning for image super-resolution: A survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(10): 3365-3387 doi: 10.1109/TPAMI.2020.2982166 [27] Kingma D P, Ba J. Adam: A method for stochastic optimization. In: Proceedings of the 3rd International Conference on Lea-rning Representations. San Diego, USA, 2014. [28] Salimans T, Kingma D P. Weight normalization: A simple reparameterization to accelerate training of deep neural networks. In: Proceedings of the 30th International Conference on Neural Information Processing Systems. Barcelona, Spain: 2016. 901− 909 [29] Bevilacqua M, Roumy A, Guillemot C, Alberi Morel M L. Low-complexity single-image super-resolution based on nonnegative neighbor embedding. In: Proceedings of the British Mach-ine Vision Conference. Surrey, UK: 2012. 1−10 [30] Zeyde R, Elad M, Protter M. On single image scale-up using sparse-representations. In: Proceedings of the 7th International Conference on Curves and Surfaces. Avignon, France: 2010. 711−730 [31] Martin D, Fowlkes C, Tal D, Malik J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In: Proceedings of the 8th International Conference on Computer Vision. Vancouver, Canada: 2001. 416−423 [32] Huang J B, Singh A, Ahuja N. Single image super-resolution from transformed self-exemplars. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, USA: 2015. 5197−5206 [33] Matsui Y, Ito K, Aramaki Y, Fujimoto A, Ogawa T, Yamasaki T, et al. Sketch-based manga retrieval using manga109 dataset. Multimedia Tools and Applications, 2017, 76(20): 21811-21838 doi: 10.1007/s11042-016-4020-z [34] Wang Z, Bovik A C, Sheikh H R, Simoncelli E P. Image quality assessment: From error visibility to structural similarity. IEEE Transactions on Image Processing, 2004, 13(4): 600-612 doi: 10.1109/TIP.2003.819861 [35] Dong C, Loy C C, Tang X O. Accelerating the super-resolution convolutional neural network. In: Proceedings of the 14th Eur-opean Conference on Computer Vision. Amsterdam, Netherlan-ds: 2016. 391−407 [36] Tai Y, Yang J, Liu X M, Xu C Y. MemNet: A persistent mem-ory network for image restoration. In: Proceedings of the IEEE International Conference on Computer Vision. Venice, Italy: 2017. 4539−4547 [37] Zhang K, Zuo W M, Zhang L. Learning a single convolutional super-resolution network for multiple degradations. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: 2018. 3262−3271 -

 下载:
下载:



计量
- 文章访问数: 2519
- HTML全文浏览量: 722
- PDF下载量: 468
- 被引次数: 0
