

-
摘要: 针对感知范围受限的分布式传感网多目标跟踪问题, 在多伯努利滤波跟踪理论基础上提出分布式视场互补多伯努利关联算术平均融合跟踪方法. 首先, 通过视场互补扩大传感器感知范围, 其中, 局部公共区域只互补一次以降低计算成本. 其次, 每个传感器分别运行局部多伯努利滤波器, 并将滤波后验结果与相邻传感器进行泛洪通信使得每个传感器获取多个相邻传感器的后验信息. 随后, 通过距离划分进行多伯努利关联, 将对应于同一目标的伯努利分量关联到同一个子集中, 并对每个关联子集进行算术平均融合完成融合状态估计. 仿真实验表明, 所提方法在有限感知范围的分布式传感器网络中能有效地进行多目标跟踪.Abstract: In order to solve the problem of multi-target tracking in distributed sensor networks with limited sensing range (LSR), a distributed arithmetic average (AA) fusion multi-Bernoulli filter is proposed based on field of view complementation and multi-Bernoulli association. First, the sensor's sensing range is expanded by complementing the field of view, in which the local common areas are complemented only once to reduce the calculation cost. Secondly, each sensor separately operates a local multi-Bernoulli filter and conducts flood communication between neighbor sensors over the filter posteriors, so that each sensor can obtain posterior information of multiple sensors. Then, multi-Bernoulli correlation is performed by distance division to associate Bernoulli components corresponding to the same target to the same subset, and the AA fusion is performed for each associated subset to complete fusion state estimation. Simulation results show that the proposed method can effectively track multiple targets in distributed sensor networks with LSR.
-
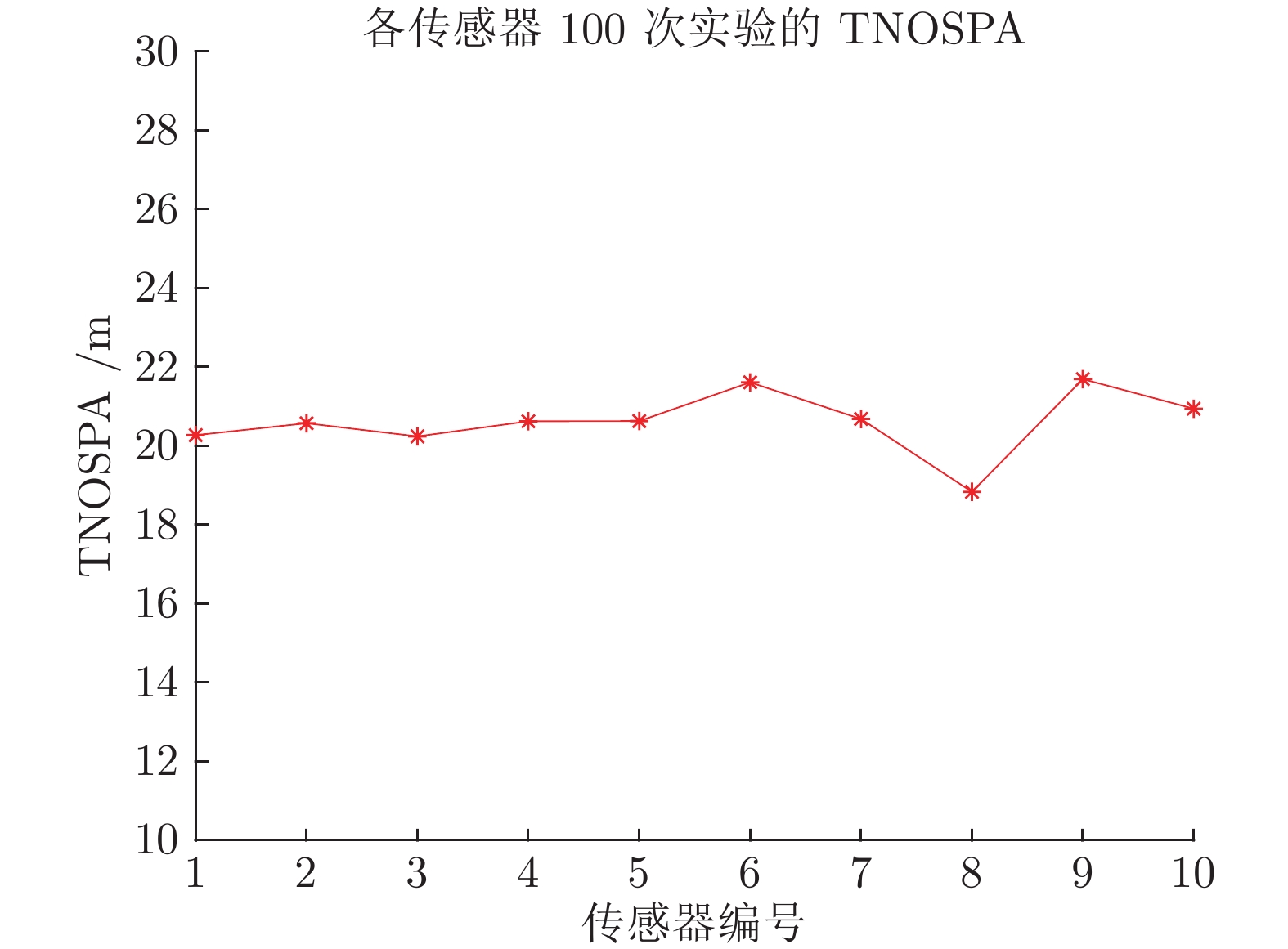
图 3 各传感器视场互补后滤波跟踪的TNOSPA
Fig. 3 Tracking error TNOSPA of local sensors with complementary field of view
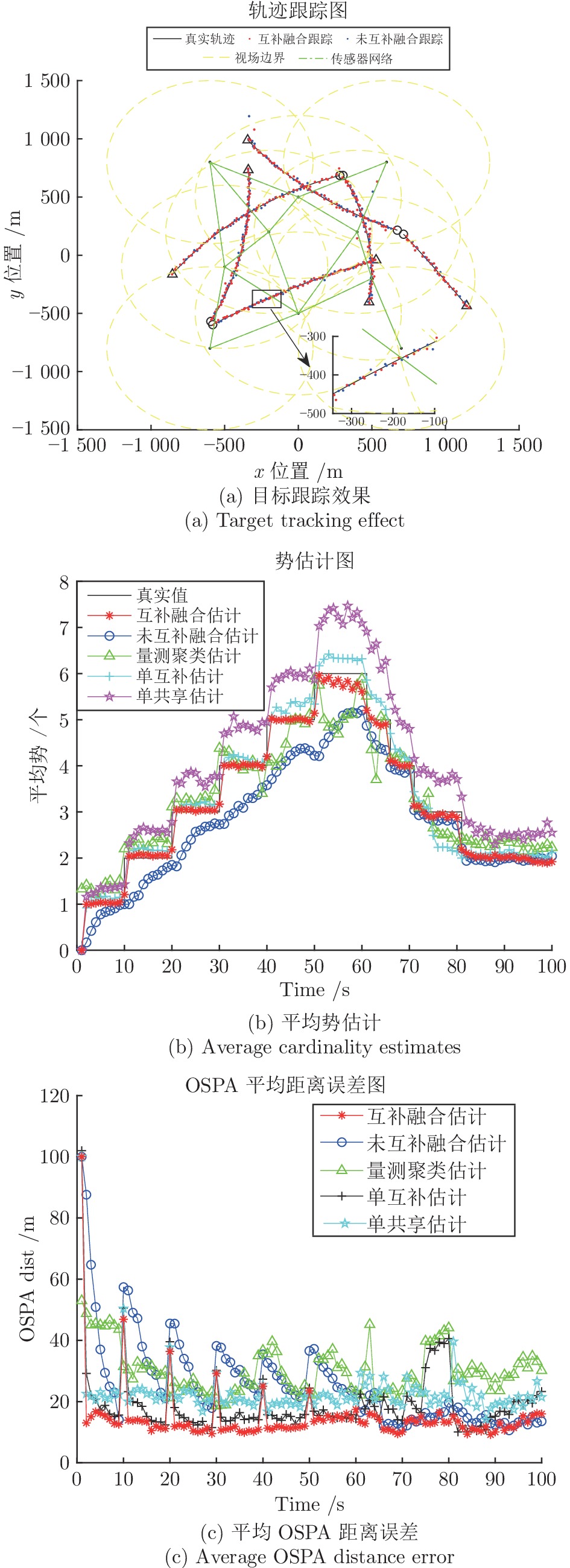
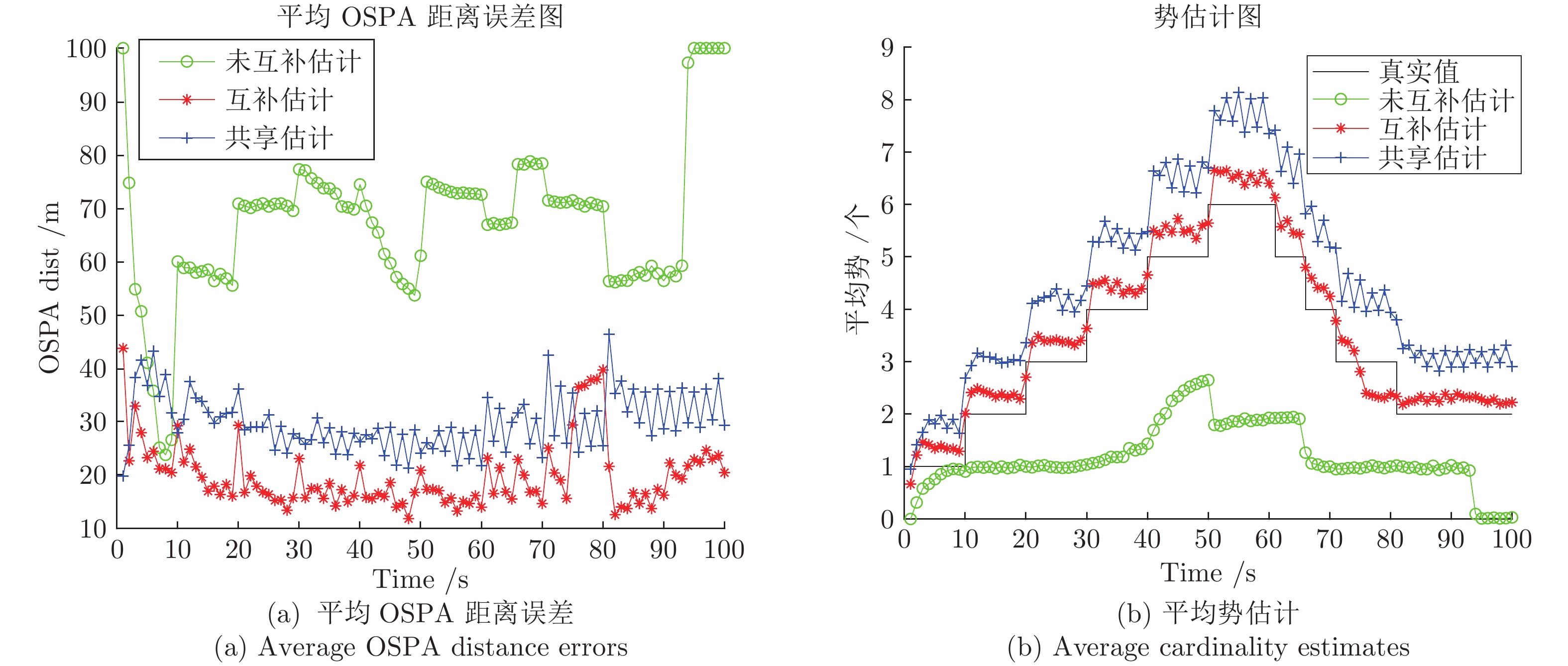
图 7 多传感器多伯努利滤波AA融合仿真效果
Fig. 7 Multi-sensor multi-Bernoulli filter AA fusion simulation effect

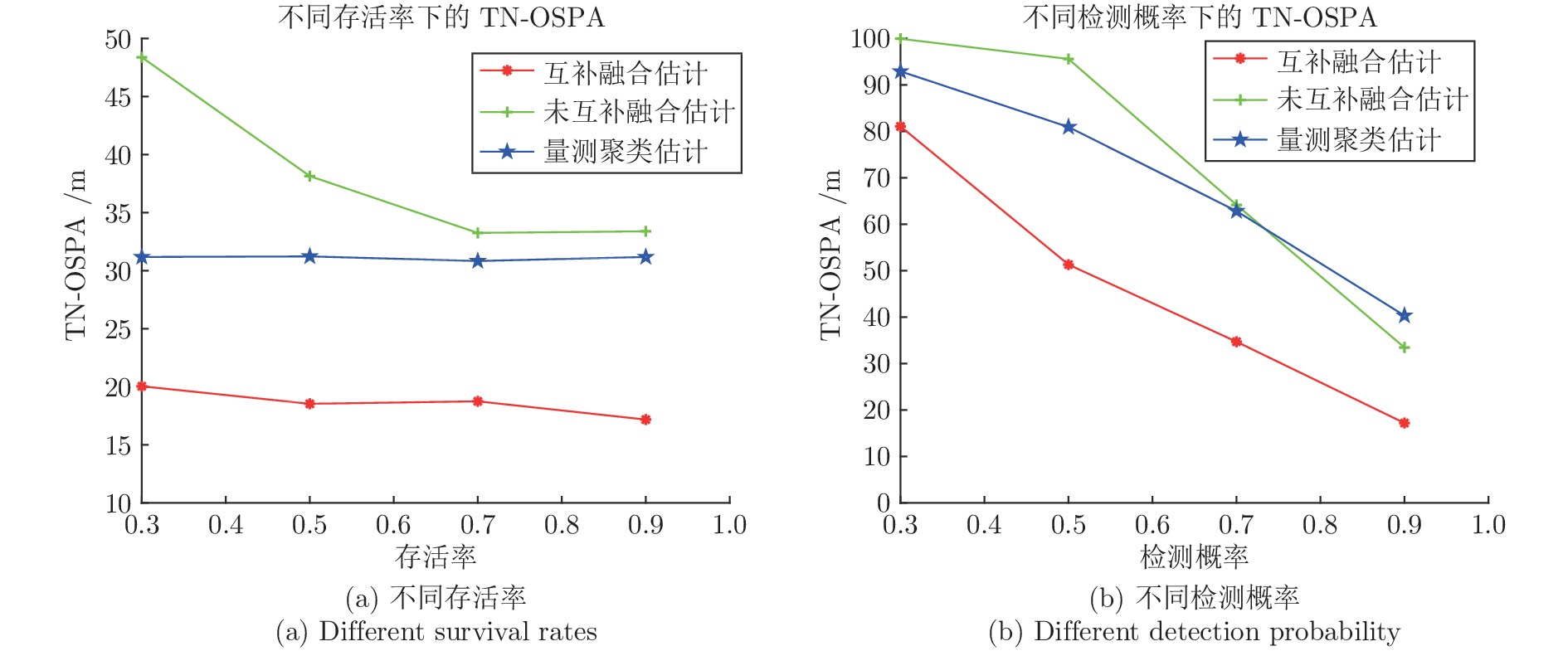
图 9 本文方法在不同存活率下的跟踪性能
Fig. 9 The tracking performance of this paper under different survival rates1
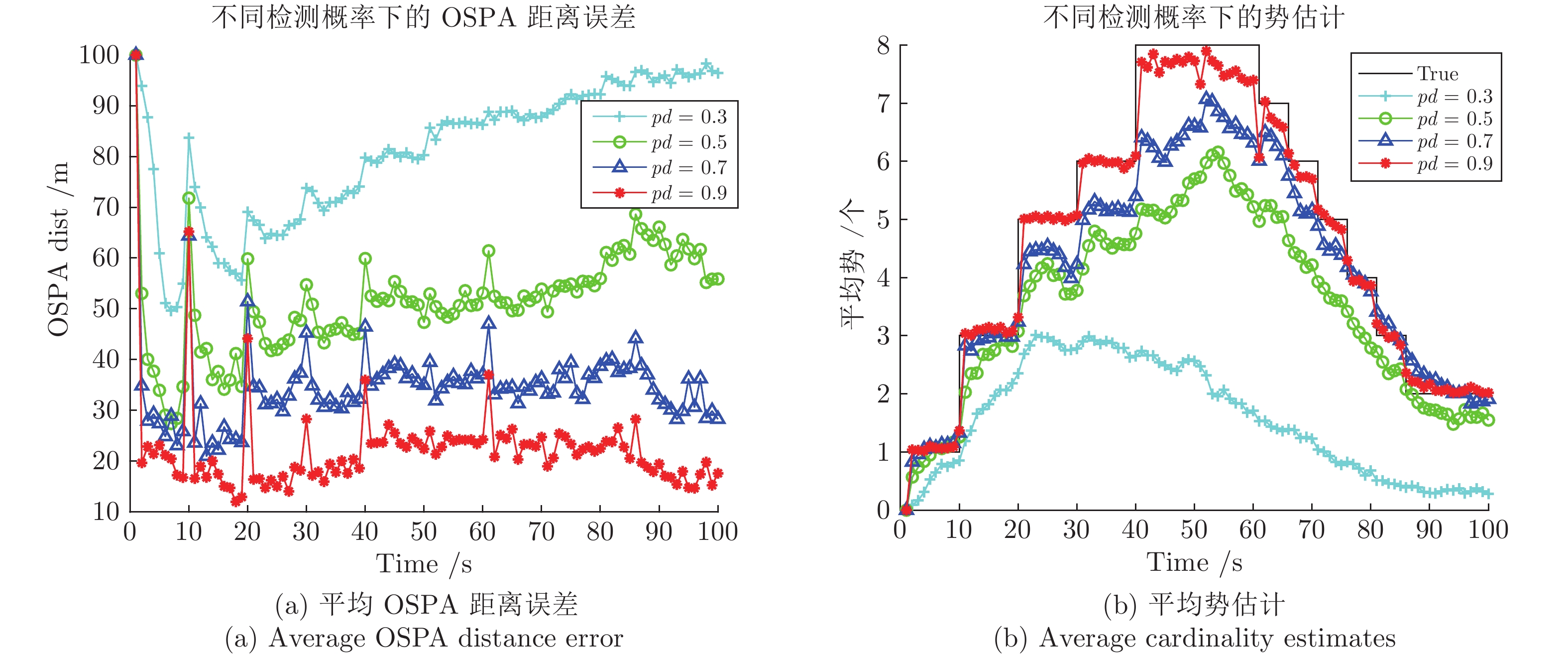
图 10 本文方法在不同检测概率下的跟踪性能
Fig. 10 The tracking performance of this paper under different detection probability
表 1 目标初始位置和存活时间
Table 1 Target's initial position and survival time
目标 出生位置 出生时间 (s) 死亡时间 (s) 目标1 [−596.14, −606.75] 1 70 目标2 [307.38, 693.2] 10 65 目标3 [692.7, 206.8] 20 80 目标4 [700, 200] 30 60 目标5 [−603.9, −588.93] 40 100 目标6 [294.12, 705.41] 50 100  下载: 导出CSV
下载: 导出CSV
表 2 单次MC平均运行时间
Table 2 Average running time per MC
方法 时间(s) 未互补估计(M1) 2.7923 视场互补估计(M2) 9.8989 共享估计(M3) 32.7096
下载: 导出CSV
表 3 单次MC平均运行时间
Table 3 Average running time per MC
方法 时间(s) 单互补估计 9.9252 量测聚类估计 10.4984 未互补融合估计 15.5495 单共享估计 31.5351 互补融合估计 45.5696
下载: 导出CSV
-
[1] 杨小军. 无线传感器网络下分布式决策融合方法综述. 计算机工程与应用, 2012, 48(11): 1-6. doi: 10.3778/j.issn.1002-8331.2012.11.001Yang Xiao-jun. Review of distributed decision fusion in wireless sensor networks. Computer Engineering and Applications, 2012, 48(11): 1-6. doi: 10.3778/j.issn.1002-8331.2012.11.001 [2] 陈辉, 韩崇昭. 机动多目标跟踪中的传感器控制策略的研究. 自动化学报, 2016, 42(4): 34-45.Chen Hui, Han Chon-Zhao. Sensor control strategy for maneuvering multi-target tracking. Acta Automatica Sinica, 2016, 42(4): 34-45. [3] Shu S L, Lin H L, Ma J, Li X Y. Multi-sensor distributed fusion estimation with applications in networked systems: A review paper. Information Fusion, 2017, 38: 122-134. doi: 10.1016/j.inffus.2017.03.006 [4] 李正杰, 谢军伟, 张浩为, 蔡保杰, 葛佳昂. 基于集中式MIMO雷达的多目标跟踪功率分配优化算法. 空军工程大学学报(自然科学版), 2019, 20(5): 76-82.Li Zheng-Jie, Xie Jun-Wei, Zhang Hao-Wei, Cai Bao-Jie, Ge Jia-Ang. Multi-target tracking power allocation optimization algorithm based on centralized MIMO radar. Journal of Air Force Engineering University (Natural Science Edition), 2019, 20(5): 76-82. [5] Mahler R P S. Advances In Statistical Multisource Multitarget Information Fusion. Artech House, 2014.161-644 [6] Vo B N, MA W K. The Gaussian mixture probability hypothesis density filter. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104. doi: 10.1109/TSP.2006.881190 [7] Vo B T, Vo B N, Cantoni A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Transactions on Signal Processing, 2007, 55(7): 3553 -3567. doi: 10.1109/TSP.2007.894241 [8] Mahler R P S, Ebrary I. Statistical Multisource-Multitarget Information Fusion. Norwood, MA: Artech House, 2007. [9] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423. doi: 10.1109/TSP.2008.2007924 [10] Li T C, Wang X X, Liang Y, Pan Q. On arithmetic average fusion and its application for distributed multi-Bernoulli multitarget tracking. IEEE Transactions on Signal Processing, 2020, 68: 2883–2896. [11] 陈辉, 贺忠良, 邓东明, 李国财. 高斯混合多伯努利滤波器基于柯西施瓦兹散度的传感器控制方法. 电子学报, 2020, 48(4): 706-716. doi: 10.3969/j.issn.0372-2112.2020.04.012Chen Hui, He Zhong-Liang, Deng Dong-Ming, Li Guo-Cai. Sensor control using Cauchy-Schwarz divergence via Gaussian mixture multi-Bernoulli filter. Acta Electronica Sinica, 2020, 48(4): 706-716. doi: 10.3969/j.issn.0372-2112.2020.04.012 [12] 王佰录. 基于随机集理论的分布式多传感器多目标跟踪技术研究[博士学位论文]. 电子科技大学, 中国, 2018Wang Bai-Lu. Distributed Multi-sensor Multi-target Tracking in the Framework of Random Finite Sets [Ph. D. dissertation]. University of Electronic Science and Technology of China, China, 2018 [13] Ren W, Beard R W, Atkins E M. Information consensus in multivehicle cooperative control. IEEE Control systems magazine, 2007, 27(2): 71-82. doi: 10.1109/MCS.2007.338264 [14] Li T C, Fan H Q, Garcia J, Corchado J M. Second-order statistics analysis and comparison between arithmetic and geometric average fusion: application to multi-sensor target tracking. Information Fusion, 2019, 51: 233-243. doi: 10.1016/j.inffus.2019.02.009 [15] Li G C, Battistelli G, Yi W, Kong L J. Distributed multi-sensor multi-view fusion based on generalized covariance intersection. Signal Processing, 2020, 166: 107246. doi: 10.1016/j.sigpro.2019.107246 [16] Wang B L, Yi W, Hoseinnezhad R, Li S Q, Yang X B. Distributed fusion with multi-Bernoulli filter based on generalized covariance intersection. IEEE Transactions on Signal Processing, 2016, 65(1): 242-255. [17] 王佰录, 易伟, 李溯琪, 孔令讲, 杨晓波. 分布式多目标伯努利滤波器的网络共识技术. 信号处理, 2018, 34(01): 1-12.Wang Bai-Lu, Yi Wei, Li Su-Qi, Kong Ling-Jiang, Yang Xiao-Bo. Consensus for distributed multi-Bernoulli filter. Signal Processing, 2018, 34(1): 1-12. [18] Da K, Li T C, Zhu Y F, Fan H Q, Fu Q. Kullback-Leibler averaging for multitarget density fusion. In: Proceedings of the International Symposium on Distributed Computing and Artificial Intelligence. Springer, 2019. 253−261 [19] Li T C, Corchado J M, Sun S D. Partial consensus and conservative fusion of gaussian mixtures for distributed PHD fusion. IEEE Transactions on Aerospace and Electronic Systems, 2017, 55(5): 2150-2163. [20] Li T C, Hlawatsch F. A distributed particle-PHD filter with arithmetic-average PHD fusion. arXiv preprint arXiv: 1712.06128 [21] Li T C, Liu Z G, Pan Q. Distributed Bernoulli filtering for target detection and tracking based on arithmetic average fusion. IEEE Signal Processing Letters, 2019, 26(12): 1812-1816. doi: 10.1109/LSP.2019.2950588 [22] Gao L, Battistelli G, Chisci L. Multiobject fusion with minimum information loss. IEEE Signal Process Letters, 2020, 27: 201-205. doi: 10.1109/LSP.2019.2963817 [23] Kim H, Granstrǒm K, Gao L, Battistelli G, Kim S, Wymeersch H. 5G mmWave cooperative positioning and mapping using multi-model PHD filter and map fusion. IEEE Transactions on Wireless Communications, 2020, 19(6): 3782-3795. [24] 卢建华, 韩旭, 李冀鑫. 带宽受限下的基于一致性的分布式融合估计器. 控制与决策, 2016, 31(12): 2155-2162.Lu Jian-Hua, Han Xu, Li Ji-Xin. Consensus-based distributed fusion estimator with communication bandwidth constraints. Control and Decision, 2016, 31(12): 2155-2162. [25] Olfati S R, Sandell N F. Distributed tracking in sensor networks with limited sensing range. In: Proceedings of the American Control Conference. Washington, USA: IEEE, 2008. 3157−3162 [26] Gan J, Vasic M, Martinoli A. Cooperative multiple dynamic object tracking on moving vehicles based on sequential monte carlo probability hypothesis density filter. In: Proceedings of the 19th International Conference on Intelligent Transportation Systems. Rio, Brazil: IEEE, 2016. 2163−2170 [27] Kamal A T, Farrell J A, Roy-Chowdhury A K. Information weighted consensus filters and their application in distributed camera networks. IEEE Transactions on Automatic Control, 2013, 58(12): 3112-3125. doi: 10.1109/TAC.2013.2277621 [28] Ilic N, Stankovic M S, Stankovic S S. Adaptive consensus-based distributed target tracking in sensor networks with limited sensing range. IEEE Transactions on Control Systems Technology, 2013, 22(2): 778-785. [29] Li T C, Elvira V, Fan H Q, Corchado J M. Local-diffusion based distributed SMC-PHD filtering using sensors with limited sensing range. IEEE Sensors Journal, 2018, 19(4): 1580-1589. [30] Yi W, Jiang M, Li S Q, Wang B L. Distributed sensor fusion for RFS density with consideration of limited sensing ability. In: Proceedings of the 20th International Conference on Information Fusion. Xi'an, China: IEEE, 2017. 1−6 [31] Li S Q, Battistelli G, Chisci L, Yi W, Wang B L, Kong L J. Multi-sensor multi-object tracking with different fields-of-view using the LMB filter. In: Proceedings of the 21st International Conference on Information Fusion. Cambridge, UK: IEEE, 2018. 1201−1208 [32] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245. doi: 10.1109/TAES.2005.1561884 [33] Mahler R P S. "Statistics 101" for multi-sensor, multitarget data fusion. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1): 53-64. doi: 10.1109/MAES.2004.1263231 [34] 李天成, 范红旗, 孙树栋, 粒子滤波理论, 方法及其在多目标跟踪中的应用. 自动化学报, 2015, 41(12): 1981-2002.LI Tian-Cheng, Fan Hong-Qi, Sun Shu-Dong, Particle filtering: theory, approach, and application for multitarget tracking. Acta Automatica Sinica, 2015, 41(12): 1981-2002. [35] Ye J C, Bresler Y, Moulin P. Asymptotic global confidence regions in parametric shape estimation problems. IEEE Transactions on Information Theory, 2000, 46(5): 1881-1895. doi: 10.1109/18.857798 [36] 刘国营, 陈秀宏. 多目标跟踪算法的最优子模式分配概率度量. 计算机工程, 2013, 39(5): 293-296. doi: 10.3969/j.issn.1000-3428.2013.05.065Liu Guo-Ying, Chen Xiu-Hong. Optimal sub pattern assignment probability metric for multi-target tracking algorithm. Computer Engineering, 2013, 39(5): 293-296. doi: 10.3969/j.issn.1000-3428.2013.05.065 [37] Li T C, Corchado J M, Chen H M. Distributed flooding-then-clustering: A lazy networking approach for distributed multiple target tracking. In: Proceedings of the 21st International Conference on Information Fusion. Cambridge, UK: IEEE, 2018. -

 下载:
下载:




计量
- 文章访问数: 1424
- HTML全文浏览量: 892
- PDF下载量: 297
- 被引次数: 0
