

Adaptive Robust Visual Servoing Control of a Soft Manipulator in Underwater Environment
-
摘要: 水下仿生软体机器人在水底环境勘测, 水下生物观测等方面具有极高的应用价值. 为进一步提升仿章鱼臂软体机器人在特殊水下环境中控制效果, 提出一种自适应鲁棒视觉伺服控制方法, 实现其在干扰无标定环境中的高精度镇定控制. 基于水底动力学模型, 设计保证动力学稳定的控制器; 针对柔性材料离线标定过程繁琐、成本高, 提出材料参数自适应估计算法; 针对水下特殊工作条件, 设计自适应鲁棒视觉伺服控制器, 实现折射效应的在线补偿, 并通过自适应未知环境干扰上界, 避免先验环境信息的求解. 所提算法在软体机器人样机中验证其镇定控制性能, 为仿生软体机器人的实际应用提供理论基础.Abstract: Underwater bioinspired soft robots enjoy high applicability in underwater exploring, biology observing, etc. This paper proposes an adaptive robust controller to improve the performance of the octopus-inspired soft robot in underwater environment and to realize accurate positioning control in the uncalibrated environment with disturbances. The paper designed a dynamically stable controller based on the underwater dynamic model. Considering the high-costing and tedious offline identification of soft material parameters, the paper proposed an adaptive method to estimate the unknowns. Considering the special underwater working condition, the paper proposed an adaptive robust visual servo controller, which can online compensate for refraction effect and avoid solving prior environment information by estimating unknown upper bound of environment disturbances. The proposed algorithm was experimentally validated in a soft robot prototype, serving as a theoretical basis of applications of bioinspired soft robots.
-
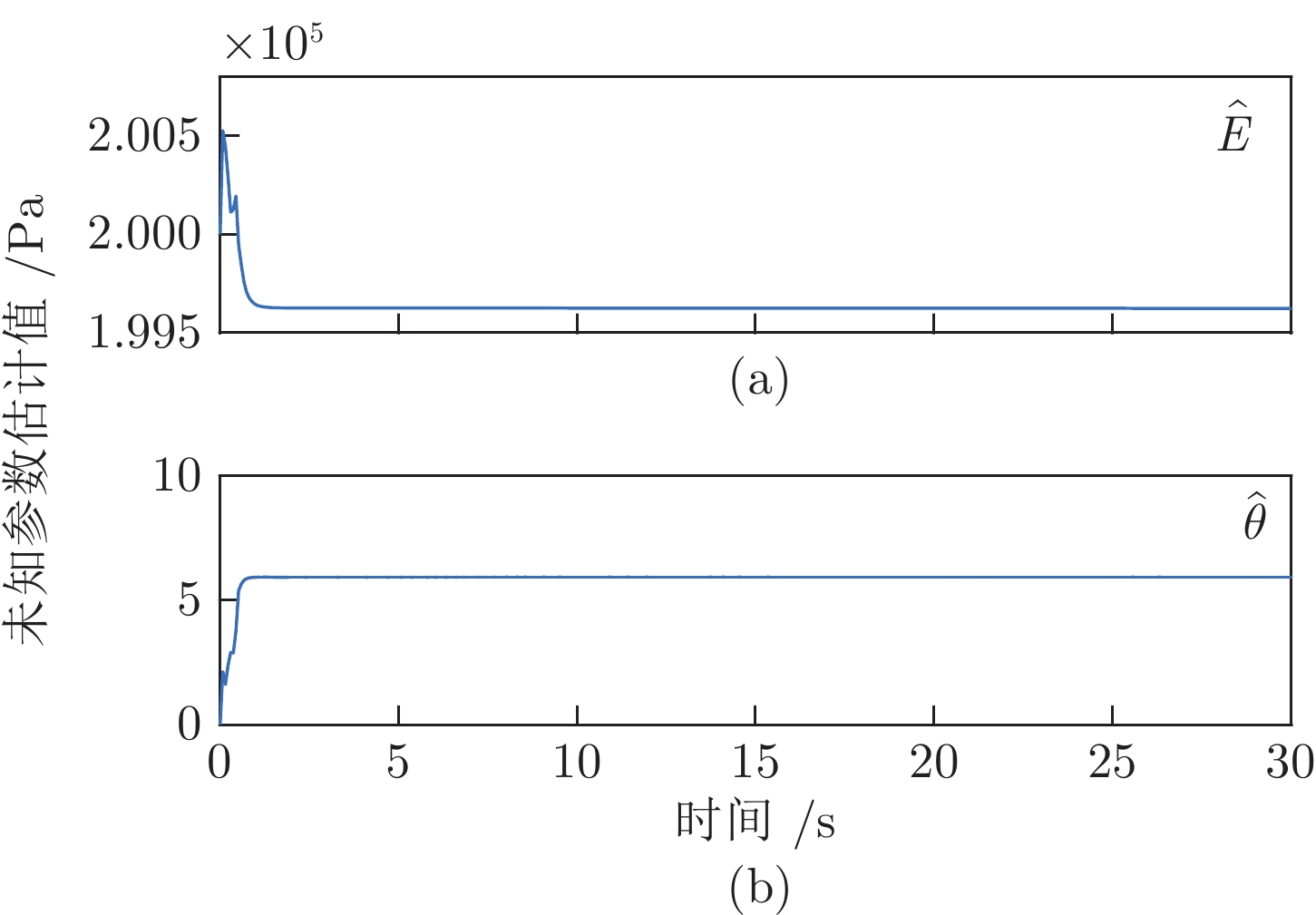
图 8
${\hat {\boldsymbol{\chi}} _D}$ 中未知参数$\hat E$ 和未知干扰上界$\hat \theta $ 的收敛过程曲线Fig. 8 Converging process of estimated parameters
$\hat E $ in${\hat {\boldsymbol{\chi}} _D}$ and of unknown interference upper bound$\hat \theta $ -
[1] Rus D, Tolley MT. Design, fabrication and control of soft robots. Nature 2015, 521(7553): 467-475. [2] Gong Z Y, Fang X, Chen X Y, Cheng J H, Xie Z X, Liu J Q, et al. A soft manipulator for efficient delicate grasping in shallow water: Modeling, control, and real-world experiments. The International Journal of Robotics Research, 2021, 40(1): 449−469 [3] Till J, Aloi V, Rucker C. Real-time dynamics of soft and continuum robots based on Cosserat rod models. The International Journal of Robotics Research 2019, 38(6): 723-746. [4] Qiao H, Li QS, Li GQ. Vibratory characteristics of flexural non-uniform Euler–Bernoulli beams carrying an arbitrary number of spring–mass systems. International Journal of Mechanical Sciences 2002, 44(4): 725-743. [5] Jones BA, Walker ID. Kinematics for multisection continuum robots. IEEE Transactions on Robotics 2006, 22(1): 43-55. [6] Allen T F, Rupert L, Duggan T R, Hein G, Albert K. Closed-form non-singular constant-curvature continuum manipulator kinematics. In: Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft). New Haven, CT, USA: IEEE, 2020. 410−416 [7] Grazioso S, Di Gironimo G, Siciliano B. A Geometrically Exact Model for Soft Continuum Robots: The Finite Element Deformation Space Formulation. Soft Robotics 2018, 6(6): 790-811. [8] Thuruthel TG, Falotico E, Renda F, Laschi C. Model-Based Reinforcement Learning for Closed-Loop Dynamic Control of Soft Robotic Manipulators. IEEE Transactions on Robotics 2019, 35(1): 124-134. [9] Xu F, Wang H, Au KWS, Chen W, Miao Y. Underwater Dynamic Modeling for a Cable-Driven Soft Robot Arm. IEEE/ASME Transactions on Mechatronics 2018, 23(6): 2726-2738. [10] Han L J, Wang H S, Liu Z, Chen W D, Zhang X F. Vision-based cutting control of deformable objects with surface tracking. IEEE/ASME Transactions on Mechatronics, 2021, 26(4): 2016−2026 [11] Qiao H, Li Y, Tang T, Wang P. Introducing Memory and Association Mechanism Into a Biologically Inspired Visual Model. IEEE Trans Cybern 2014, 44(9): 1485-1496. [12] 徐德. 单目视觉伺服研究综述. 自动化学报 2018, 44(10): 1729-1746.Xu De. A tutorial for monocular visual servoing. Acta Automatica Sinica, 2018, 44(10): 1729-1746. [13] Xu F, Wang H, Liu Z, Chen W. Adaptive visual servoing for an underwater soft robot considering refraction effects. IEEE Transactions on Industrial Electronics 2020, 67(12): 10575-10586. [14] Gu H Y, Wang H S, Xu F, Liu Z, Chen W D. Active fault detection of soft manipulator in visual servoing. IEEE Transactions on Industrial Electronics, 2021, 68(10): 9778−9788 [15] Liu YH, Wang H, Wang C, Lam KK. Uncalibrated visual servoing of robots using a depth-independent interaction matrix. IEEE Transactions on Robotics 2006, 22(4): 804-817. [16] Bonkovic M, Hace A, Jezernik K. Population-based uncalibrated visual servoing. IEEE/ASME Transactions on Mechatronics 2008, 13(3): 393-397. [17] Li M, Kang R, Branson DT, Dai JS. Model-free control for continuum robots based on an adaptive kalman filter. IEEE/ASME Transactions on Mechatronics 2018, 23(1): 286-297. [18] Meline A, Triboulet J, Jouvencel B. A camcorder for 3D underwater reconstruction of archeological objects. In: Proceedings of IEEE Oceans 2010 MTS/IEEE Seattle. Seattle, USA: IEEE, 2010. 1−9 [19] Botelho S S da C, Drews P, Oliveira G L, Figueiredo M da S. Visual odometry and mapping for underwater autonomous vehicles. In: Proceedings of the 6th Latin American Robotics Symposium. Valparaiso, Chile: IEEE, 2009. 1−6 [20] Tsai R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE Journal on Robotics and Automation 1987, 3(4): 323-344. [21] Traffelet L, Eppenberger T, Millane A, Schneider T, Siegwart R. Target-based calibration of underwater camera housing parameters. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Lausanne, Switzerland: IEEE, 2016. 201−206 [22] Zhao S, Li X J, Liu T. Camera distortion calibration method based on nonspecific planar target. In: Proceedings of the IEEE International Conference on Signal and Image Processing (ICSIP). Beijing, China: IEEE, 2016. 452−457 [23] He W, Ge SS, Zhang S. Adaptive boundary control of a flexible marine installation system. Automatica 2011, 47(12): 2728-2734. [24] Forsyth D A, Ponce J. Computer Vision: A Modern Approach. London: Pearson Education, 2002. -

 下载:
下载:












图(9)
计量
- 文章访问数: 2110
- HTML全文浏览量: 793
- PDF下载量: 383
- 被引次数: 0
