

Parallel Systems and Digital Twins: A Data-driven Mathematical Representation and Computational Framework
-
摘要: 旨在为平行系统及ACP方法建立一种数据驱动的数学形式和计算框架, 该形式与框架也适用于数字孪生系统.首先, 基于动态系统状态方程方法论, 给出了平行系统的虚实双系统表示方法, 基于此表示方法为平行系统问题提供了一种数学表示.围绕该表示, 讨论了虚实系统互动、平行系统与数字孪生系统异同等问题.然后, 为ACP方法提供了一种计算框架, 详细解释了人工系统(Artificial systems, A)、计算实验(Computational experiments, C)、平行执行(Parallel execution, P)的数学计算求解过程, 并讨论了“学习与训练”、“实验与评估”、“管理与控制”、灵捷–聚焦–收敛(AFC)、小数据-大数据-小智能等概念的相关数学表示, 并讨论了智能科学与平行系统数学架构的关系以及平行智能的内涵.最后, 以大学校园园区能源管理系统为案例, 为平行系统数学架构和方法提供一个直观的算例.Abstract: This paper aims to provide a mathematical representation and computational framework for parallel systems and the ACP approach, which are also applicable to digital systems. Based on the system state equation methodology, the dual real-virtual system representation for parallel systems is presented, based on which the parallel system problem is described in mathematical forms. Further, the computational framework for the ACP approach, which explain in details the mathematical processes for artificial systems (A), computational experiments (C) and parallel execution (P). Based on the ACP approach framework, concepts such as "learning and training", "experiments and evaluation", "management and control" are mapped into ACP0s mathematical computational framework, as well as related concepts such as AFC (AgileFocus-Convergence) and "small data, big data, small intelligence". The synergy of parallel system framework and artificial intelligence technology is also discussed and investigated, leading to the origin and implications of "parallel intelligence". A campus-wide energy management problem with considerations of human factors is utilized as an illustrative example of applying the parallel system mathematical representation and computational framework in power and energy systems.
-
Key words:
- Parallel systems /
- digital twins /
- ACP /
- hybrid human-machine enhanced intelligence
1) 本文责任编委 刘德荣 -

图 2 美国某大学校园电网的网络拓扑
Fig. 2 The network topology of the campus network of an American university
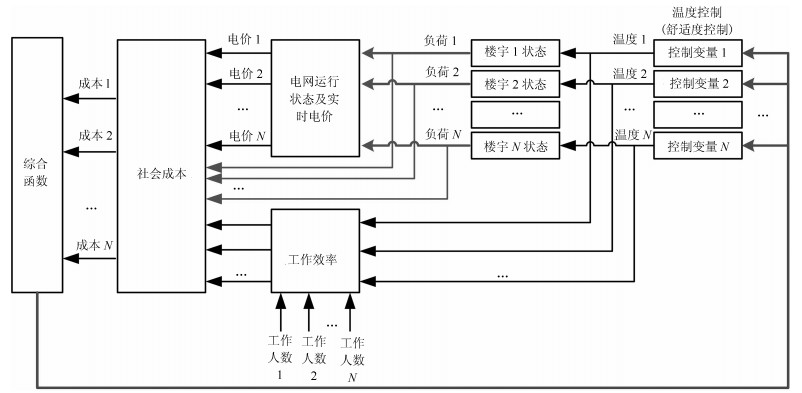
图 3 校园能源社区系统管控流程
Fig. 3 Management and control process of campus energy community system
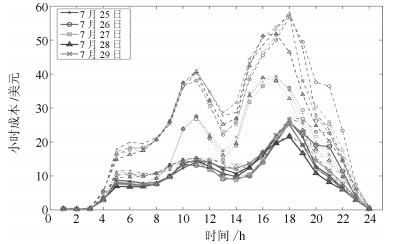
图 4 夏季场景中6个目标楼宇的总体社会成本与不同室内温度设置的比较
Fig. 4 Comparison of the total social cost of six target buildings and different indoor temperature settings in summer
表 1 用于训练目标建筑物的隐藏神经元的数量和训练结果的回归R值
Table 1 The number of hidden neurons used to train the target building and the regression R value of training results
编号 建筑名 隐藏神经元(个) R值 1 里奇中心 30 0.88 2 法律大楼 20 0.96 3 斯特姆礼堂 30 0.96 4 丹尼尔大楼 30 0.86 5 纽曼中心 50 0.86 6 奥林中心 5 0.94  下载: 导出CSV
下载: 导出CSV
-
[1] Wang F Y. Shadow Systems: A New Concept for Nested and Embedded Co-simulation for Intelligent Systems. Tucson, Arizona State, USA: University of Arizona, 1994. [2] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5): 485-489, 514 http://d.old.wanfangdata.com.cn/Periodical/kzyjc200405002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5): 485-489, 514 http://d.old.wanfangdata.com.cn/Periodical/kzyjc200405002 [3] 王飞跃.关于复杂系统的建模、分析、控制和管理.复杂系统与复杂性科学, 2006, 3(2): 26-34 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200602004Wang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2): 26-34 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200602004 [4] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4): 293-302 doi: 10.3724/SP.J.1004.2013.00293Wang Fei-Yue. Parallel Control: A Method for Data-Driven and Computational Control. Acta Automatica Sinica, 2013, 39(4): 293-302. doi: 10.3724/SP.J.1004.2013.00293 [5] 王飞跃.平行控制与数字孪生:控制理论的回顾与展望.智能科学与技术学报, 2020, 2(3): 213-222Wang Fei-Yue. Parallel control and digital twins: Control Theory revisited and reshaped. Chinese Journal of Intelligent Science and Technology, 2020, 2(3): 213-222 [6] 杨林瑶, 陈思远, 王晓, 张俊, 王成红.数字孪生与平行系统:发展现状、对比及展望.自动化学报, 2019, 45(11): 2001-2031 doi: 10.16383/j.aas.2019.y000002Yang Lin-Yao, Chen Si-Yuan, Wang Xiao, Zhang Jun, Wang Cheng-Hong. Digital twins and parallel systems: State of the art, comparisons and prospect. Acta Automatica Sinica, 2019, 45(11): 2001-2031 doi: 10.16383/j.aas.2019.y000002 [7] 王飞跃, 刘德荣, 熊刚, 程长建, 赵冬斌.复杂系统的平行控制理论及应用.复杂系统与复杂性科学, 2012, 9(3): 1-12 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201203001Wang Fei-Yue, Liu De-Rong, Xiong Gang, Cheng Chang-Jian, Zhao Dong-Bin. Parallel control theory of complex systems and applications. Complex Systems and Complexity Science, 2012, 9(3): 1-12 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201203001 [8] Wang F Y, Wang X, Li L X, Li L. Steps toward parallel intelligence. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4): 345-348 http://d.old.wanfangdata.com.cn/Periodical/zdhxb-ywb201604001 [9] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习—机器学习的一个新型理论框架.自动化学报, 2017, 43(1): 1-8 doi: 10.16383/j.aas.2017.y000001Li Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning — a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1): 1-8 doi: 10.16383/j.aas.2017.y000001 [10] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP: Parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1): 1-5 http://d.old.wanfangdata.com.cn/Periodical/gpxygpfx200512007 [11] Wang F Y, Zhang J J, Zheng X H, Yuan Y, Dai X X, Zhang J, et al. Where does AlphaGo go: From church-turing thesis to alphago thesis and beyond. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2): 113-120 http://cn.bing.com/academic/profile?id=1a2559dd75dbcccdd436bdd38af37c14&encoded=0&v=paper_preview&mkt=zh-cn [12] Wei Q L, Li H Y, Wang F Y. Parallel control for continuous-time linear systems: A case study. IEEE/CAA Journal of Automatica Sinica, 2020, 7(4): 919-928 http://d.old.wanfangdata.com.cn/Periodical/zdhxb-ywb202004001 [13] 王飞跃. X5.0:平行时代的平行智能体系.中国计算机学会通讯, 2015, 11(5): 10-14 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0210208514/Wang Fei-Yue. X5.0: parallel intelligence in parallel age. Communications of CCF, 2015, 11(5): 10-14 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0210208514/ [14] (Koller D, Friedman N[著], 王飞跃, 韩素青[译].概率图模型:原理与技术.北京:清华大学出版社, 2015.Koller D, Friedman N[Author], Wang Fei-Yue, Han Su-Qing[Translator]. Probabilistic Graphical Models. Beijing: Tsinghua University Press, 2015. [15] Singhal A. Introducing the knowledge graph: Things, not strings[Online], available: https://www.blog.google/products/search/introducing-knowledge-graph-things-not/, February 26, 2020 [16] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1): 1-8 doi: 10.16383/j.aas.2015.c000001Wang Fei-Yue. Software-defined systems and knowledge automation: A parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1): 1-8 doi: 10.16383/j.aas.2015.c000001 [17] Tan K C, Lee T H, Khor E F. Evolutionary algorithms for multi-objective optimization: Performance assessments and comparisons. Artificial Intelligence Review, 2002, 17(4): 251-290 doi: 10.1023-A-1015516501242/ [18] 王飞跃.词计算和语言动力学系统的计算理论框架.模式识别与人工智能, 2001, 14(4): 377-384 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn200104001Wang Fei-Yue. Computing with words and a framework for computational linguistic dynamic systems. Pattern Recognition and Artificial Intelligence, 2001, 14(4): 377-384 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn200104001 [19] 王飞跃.词计算和语言动力学系统的基本问题和研究.自动化学报, 2005, 31(6): 844-852 http://www.aas.net.cn/article/id/15941Wang Fei-Yue. Fundamental issues in research of computing with words and linguistic dynamic systems. Acta Automatica Sinica, 2005, 31(6): 844-852 http://www.aas.net.cn/article/id/15941 [20] 王飞跃, 张俊.智联网:概念、问题和平台.自动化学报, 2017, 43(12): 2061-2070 doi: 10.16383/j.aas.2017.y000006Wang Fei-Yue, Zhang Jun. Internet of minds: The concept, issues and platforms. Acta Automatica Sinica, 2017, 43(12): 2061-2070 doi: 10.16383/j.aas.2017.y000006 [21] 王飞跃, 张军, 张俊, 王晓.工业智联网:基本概念、关键技术与核心应用.自动化学报, 2018, 44(9): 1606-1617 doi: 10.16383/j.aas.2018.y000004Wang Fei-Yue, Zhang Jun, Zhang Jun, Wang Xiao. Industrial internet of minds: Concept, technology and application. Acta Automatica Sinica, 2018, 44(9): 1606-1617 doi: 10.16383/j.aas.2018.y000004 [22] Roweis S T, Saul L K. Nonlinear dimensionality reduction by locally linear embedding. Science, 2001, 290(5500): 2323-2326 doi: 10.1126-science.290.5500.2323/ [23] Almalaq A, Hao J, Zhang J J, Wang F Y. Parallel building: A complex system approach for smart building energy management. IEEE/CAA Journal of Automatica Sinica, 2019, 6(6): 1452-1461 http://d.old.wanfangdata.com.cn/Periodical/zdhxb-ywb201906015 [24] 马世乾, 崇志强, 何富林, 郝君, 张俊, 宫晓燕.平行能源系统:博弈的复杂社会技术系统.电力系统及其自动化学报, 2019, 31(8): 59-65, 85 http://d.old.wanfangdata.com.cn/Periodical/dlxtjqzdhxb201908011Ma Shi-Qian, Chong Zhi-Qiang, He Fu-Lin, Hao Jun, Zhang Jun, Gong Xiao-Yan. Parallel energy systems: A game method for composite social-technical systems. Proceedings of the CSU – EPSA, 2019, 31(8): 59-65, 85 http://d.old.wanfangdata.com.cn/Periodical/dlxtjqzdhxb201908011 [25] Zhang J J, Gao D W, Zhang Y C, Wang X, Zhao X Y, Duan D L, et al. Social energy: Mining energy from the society. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3): 466-482 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1311.5158 [26] 张俊, 王飞跃, 方舟.社会能源:从社会中获取能源.智能科学与技术学报, 2019, 1(1): 7-20 http://d.old.wanfangdata.com.cn/Periodical/hjbh201018018Zhang Jun, Wang Fei-Yue, Fang Zhou. Social energy: Mining energy from the society. Chinese Journal of Intelligent Science and Technology, 2019, 1(1): 7-20 http://d.old.wanfangdata.com.cn/Periodical/hjbh201018018 [27] Wang F Y, Zhang J J, Qin R, Yuan Y. Social energy: Emerging token economy for energy production and consumption. IEEE Transactions on Computational Social Systems, 2019, 6(3): 388-393 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/0306312786016002008 -

 下载:
下载:


计量
- 文章访问数: 2587
- HTML全文浏览量: 639
- PDF下载量: 679
- 被引次数: 0
