

-
摘要:
在基于表面肌电信号(Surface electromyography, sEMG)的意图识别研究领域, 目前大多数的研究主要集中在提高肌电识别的准确性方面. 然而, 在实际应用中, 基于sEMG识别的交互系统往往受到诸多非理想因素干扰, 肌电识别的准确性大大降低. 本文主要关注在非理想条件下肌电识别的鲁棒性研究, 首先详细归纳了肌电识别方法受到的非理想干扰因素(如电极偏移、个体性差异、肌肉疲劳、肢体姿态或其他综合性干扰), 总结了当前研究的抗干扰方法; 随后讨论了非理想干扰因素研究现状中的主要问题; 最后在构建肌电数据集、探索深度学习和迁移学习以及肌电分解研究等方面, 对未来的关键技术进行了展望.
Abstract:In sEMG (surface electromyography)-based recognition, most studies are currently focusing on improving recognition accuracies. While in real applications, sEMG-based recognition systems are limited by many disturbances in non-ideal conditions, and recognition accuracies are worsen greatly. This paper is focusing on the robustness of sEMG-based recognition. Many disturbances in non-ideal conditions are detailed and summarized, including electrode shifts, individual differences, muscle fatigue, limb postures and others. Also, many novel methods that are proposed to remove or reduce the impact of these disturbances are summarized. Furthermore, main problems in these current studies are discussed. Finally, prospections for the future development are proposed, including building sEMG-based datasets, exploiting deep learning based and transfer learning-based recognition, and sEMG decomposition.
-

图 1 基于监督学习的sEMG识别模型训练与测试框架
Fig. 1 The training and testing framework of sEMG recognition model based on supervised learning



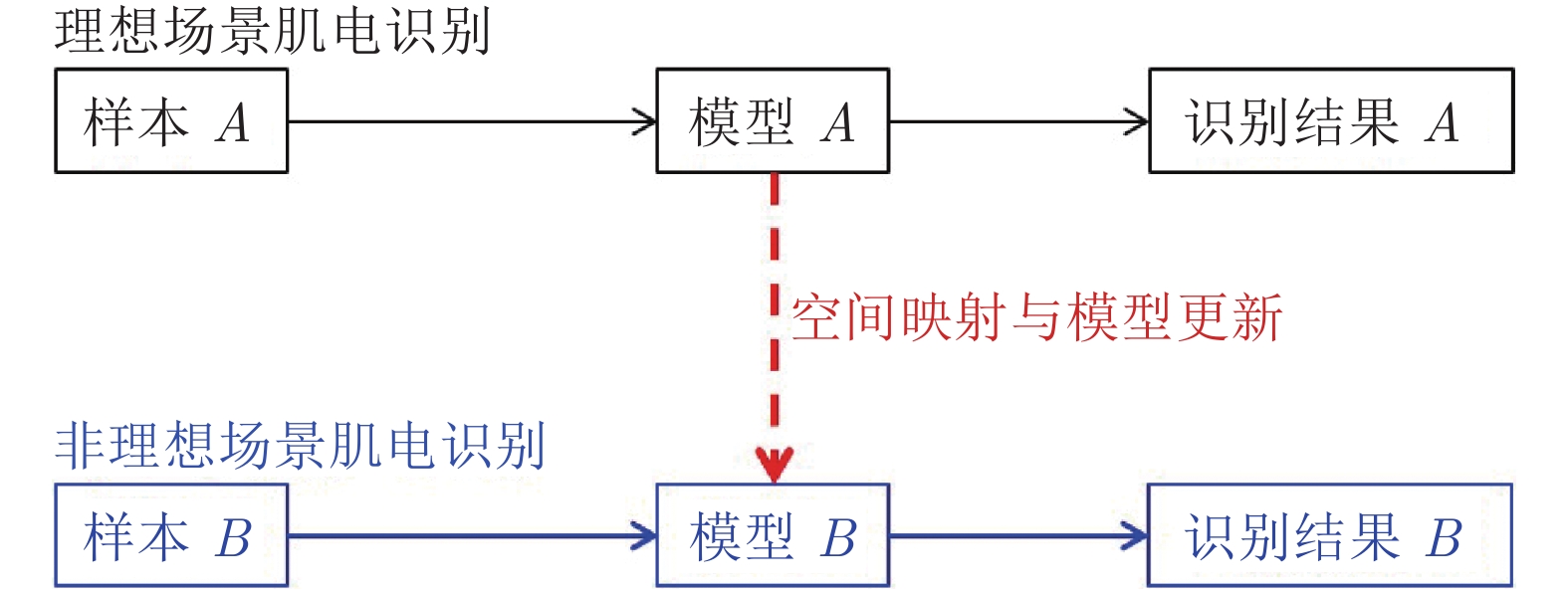
图 8 基于迁移学习的理想场景与非理想场景之间肌电识别模型的更新与适应
Fig. 8 Update and adaptation of sEMG-based recognition model between ideal and non-ideal scenarios based on transfer learning
表 1 非理想因素及解决方案
Table 1 Non-ideal factors and solutions
非理想因素 数据扩增 鲁棒特征 模型更新 电极偏移 1) 多位置数据扩增[13, 16]
2) 多通道数据扩增[12]
3) 惯导等数据融合[17-18]1) AR、TDAR特征[16, 19]
2) 倒频谱特征[20]
3) Variogram 特征[10]
4) 结构相似性特征[21]
5) 共空间模式特征[22]
6) 灰度共生矩阵特征[14]1) 模型修正与协方差偏移适应[24-25]
2) 期望最大化迁移学习[15, 26-27]
3) 自适应增量式混合分类器[28-29]
4) 偏移估计与模型更新[30]
5) 骨骼位置估计与校正[31]个体性差异 1) 多人数据扩增[36]
2) 惯导等数据融合[37]
3) 个体形态参数归一化[38]1) 肌电分解特征[39]
2) 多分辨率肌肉协同特征[40]
3) 共同空间映射[41]1) SVM权重更新策略[42-43, 91]
2) 典型相关分析低维共空间映射[44]
3) 用户、动作依赖的双线性模型[45]
4) 基于最大收缩力的模型泛化[46]
5) 基于卷积神经网络的模型迁移[47]肢体姿态 1) 多姿态下的数据扩增[75-77]
2) “动态训练”数据采集[70, 78]
3) 惯导等数据融合[17, 75-76, 79]1) 谱矩等频域特征[80-82]
2) 稀疏表达特征[83-84]— 肌肉疲劳 1) 频域特征归一化 (MDF, MNF[52, 92],
STFT, WT[93-94], iMDF, iMNF[56], 一维
频谱—标准差[59]等)
2) 疲劳状态的分类识别[59, 62–64] 下载: 导出CSV
下载: 导出CSV
表 2 sEMG数据集
Table 2 Surface EMG signal datasets
数据集 传感器 参与人数 动作类别 NinaPro[4] DB1 1) Otto Bock MyoBock 13E200 电极,
(10 通道, 肌电 RMS 特征)
2) 数据手套 Cyberglove (22 通道)27 名健康人 52 类手部动作重复 10 次 DB2/3 1) Delsys Trigno Wireless 肌电系统,
(12 通道双差分 EMG, 36 通道 ACC)
2) 数据手套 Cyberglove (22 通道)
3) 手指力传感器 (6 通道)
4) 腕部倾角传感器 (2 通道)40 名健康人 49 个手部动作重复 6 次 DB4 1) Cometa 单差分无线肌电电极 (12
通道单差分)10 名健康人 52 类手部动作重复 6 次 DB5 1) Thalmic Myo 肌电臂环 (2 套, 共计
2×8 通道单差分)
2) 数据手套 Cyberglove (22 通道)10 名健康人 52 类手部动作重复 6 次 DB6 1) Delsys Trigno Wireless 肌电系统
(14 通道, 42 通道 ACC)
2) Tobii Pro Glasses II (追踪眼动和视野)10 名健康人 7 个抓握动作重复 12 次
重复 5 天DB7 1) Delsys Trigno Wireless 肌电系统
(12 通道 EMG, 9 轴 IMU)
2) 数据手套 Cyberglove (22 通道)20 名健康人
2 名截肢者40 个手部动作重复 6 次 DB8 1) Delsys Trigno Wireless 肌电系统
(16通道 EMG, 9 轴 IMU, 采样至 2 kHz)
2) 数据手套 Cyberglove (22 通道)10 名健康人
2 名截肢者9 个手部动作 CSL-HDEMG[31] 1) HD-EMG (8×24 = 192通道) 5 名健康人 27 个手部/手指动作 CapgMyo[95] DB-a 1) HD-EMG (8×16 = 128 通道) 18 名健康人 8 个手指动作
8 个手指动作 (同上)
不同时间段重复两次
12 个手指动作DB-b 10 名健康人 DB-c 10 名健康人 UCI 等 Myo[96] 1) Thalmic Myo 肌电臂环 (8 通道) 36 名健康人 8 个抓握动作 Christos-Delsys[97] 1) Delsys Trigno Wireless (2 通道) 6 名健康人 6 个抓握动作
下载: 导出CSV
-
[1] 丁其川, 熊安斌, 赵新刚, 韩建达. 基于表面肌电的运动意图识别方法研究及应用综述. 自动化学报, 2016, 42(1): 13−25Ding Qi-Chuan, Xiong An-Bin, Zhao Xin-Gang, Han Jian-Da. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 2016, 42(1): 13−25 [2] He J Y, Jiang N. Biometric from surface electromyogram (sEMG): Feasibility of user verification and identification based on gesture recognition. Frontiers in Bioengineering and Biotechnology, 2020, 8: 58 doi: 10.3389/fbioe.2020.00058 [3] 赵新刚, 谈晓伟, 张弼. 柔性下肢外骨骼机器人研究进展及关键技术分析. 机器人, 2020, 42(3): 365−384Zhao Xin-Gang, Tan Xiao-Wei, Zhang Bi. Development of soft lower extremity exoskeleton and its key technologies: A survey. Robot, 2020, 42(3): 365−384 [4] Atzori M, Gijsberts A, Castellini C, Caputo B, Hager A G M, Elsig S, et al. Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Scientific Data, 2014, 1: 140053 doi: 10.1038/sdata.2014.53 [5] Cognolato M, Gijsberts A, Gregori V, Saetta G, Giacomino K, Hager A G M, et al. Gaze, visual, myoelectric, and inertial data of grasps for intelligent prosthetics. Scientific Data, 2020, 7(1): 43 doi: 10.1038/s41597-020-0380-3 [6] 丁其川, 赵新刚, 韩建达. 基于肌电信号的上肢多关节连续运动估计. 机器人, 2014, 36(4): 469−476Ding Qi-Chuan, Zhao Xin-Gang, Han Jian-Da. EMG-based estimation for multi-joint continuous movement of human upper limb. Robot, 2014, 36(4): 469−476 [7] Belyea A, Englehart K, Scheme E. FMG versus EMG: A comparison of usability for real-time pattern recognition based control. IEEE Transactions on Biomedical Engineering, 2019, 66(11): 3098−3104 doi: 10.1109/TBME.2019.2900415 [8] Bi L Z, Feleke A G, Guan C. A review on EMG-based motor intention prediction of continuous human upper limb motion for human-robot collaboration. Biomedical Signal Processing and Control, 2019, 51: 113−127 doi: 10.1016/j.bspc.2019.02.011 [9] Hudgins B, Parker P, Scott R N. A new strategy for multifunction myoelectric control. IEEE Transactions on Biomedical Engineering, 1993, 40(1): 82−94 doi: 10.1109/10.204774 [10] Stango A, Negro F, Farina D. Spatial correlation of high density EMG signals provides features robust to electrode number and shift in pattern recognition for myocontrol. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23(2): 189−198 doi: 10.1109/TNSRE.2014.2366752 [11] Young A J, Hargrove L J, Kuiken T A. The effects of electrode size and orientation on the sensitivity of myoelectric pattern recognition systems to electrode shift. IEEE Transactions on Biomedical Engineering, 2011, 58(9): 2537−2544 doi: 10.1109/TBME.2011.2159216 [12] He J Y, Sheng X J, Zhu X Y, Jiang N. Electrode density affects the robustness of myoelectric pattern recognition system with and without electrode shift. IEEE Journal of Biomedical and Health Informatics, 2019, 23(1): 156−163 doi: 10.1109/JBHI.2018.2805760 [13] Hargrove L, Englehart K, Hudgins B. The effect of electrode displacements on pattern recognition based myoelectric control. In: Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society. New York, USA: IEEE, 2006. 2203−2206 [14] He J Y, Zhu X Y. Combining improved gray-level Co-occurrence matrix with high density grid for myoelectric control robustness to electrode shift. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25(9): 1539−1548 doi: 10.1109/TNSRE.2016.2644264 [15] Prahm C, Schulz A, Paa\ssen B, Schoisswohl J, Kaniusas E, Dorffner G, et al. Counteracting electrode shifts in upper-limb prosthesis control via transfer learning. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019, 27(5): 956−962 doi: 10.1109/TNSRE.2019.2907200 [16] Hargrove L, Englehart K, Hudgins B. A training strategy to reduce classification degradation due to electrode displacements in pattern recognition based myoelectric control. Biomedical Signal Processing and Control, 2008, 3(2): 175−180 doi: 10.1016/j.bspc.2007.11.005 [17] Fougner A, Scheme E, Chan A D C, Englehart K, Stavdahl O. A multi-modal approach for hand motion classification using surface EMG and accelerometers. In: Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Boston, USA: IEEE, 2011. 4247−4250 [18] Lopez N M, Di Sciascio F, Soria C M, Valentinuzzi M E. Robust EMG sensing system based on data fusion for myoelectric control of a robotic arm. BioMedical Engineering OnLine, 2009, 8: 5 doi: 10.1186/1475-925X-8-5 [19] Young A J, Hargrove L J, Kuiken T A. Improving myoelectric pattern recognition robustness to electrode shift by changing interelectrode distance and electrode configuration. IEEE Transactions on Biomedical Engineering, 2012, 59(3): 645−652 doi: 10.1109/TBME.2011.2177662 [20] Tkach D, Huang H, Kuiken T A. Study of stability of time-domain features for electromyographic pattern recognition. Journal of NeuroEngineering and Rehabilitation, 2010, 7: 21 doi: 10.1186/1743-0003-7-21 [21] Boschmann A, Platzner M. Towards robust HD EMG pattern recognition: Reducing electrode displacement effect using structural similarity. In: Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Chicago, USA: IEEE, 2014. 4547−4750 [22] Pan L Z, Zhang D G, Jiang N, Sheng X J, Zhu X Y. Improving robustness against electrode shift of high density EMG for myoelectric control through common spatial patterns. Journal of NeuroEngineering and Rehabilitation, 2015, 12: 110 doi: 10.1186/s12984-015-0102-9 [23] Huang G, Xian Z E, Tang F, Li L L, Zhang L, Zhang Z. Low-density surface electromyographic patterns under electrode shift: Characterization and NMF-based classification. Biomedical Signal Processing and Control, 2020, 59: 101890 doi: 10.1016/j.bspc.2020.101890 [24] Amsuss S, Goebel P M, Jiang N, Graimann B, Paredes L, Farina D. Self-correcting pattern recognition system of surface EMG signals for upper limb prosthesis control. IEEE Transactions on Biomedical Engineering, 2014, 61(4): 1167−1176 doi: 10.1109/TBME.2013.2296274 [25] Vidovic M M C, Hwang H J, Amsuss S, Hahne J M, Farina D, Muller K R. Improving the robustness of myoelectric pattern recognition for upper limb prostheses by covariate shift adaptation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(9): 961−970 doi: 10.1109/TNSRE.2015.2492619 [26] Prahm C, Paassen B, Schulz A, Hammer B, Aszmann O. Transfer learning for rapid re-calibration of a myoelectric prosthesis after electrode shift. In: Proceedings of the 3rd International Conference on NeuroRehabilitation on Converging Clinical and Engineering Research on Neurorehabilitation Ⅱ. Segovia, Spain: Springer, 2017. 153−157 [27] Paaβen B, Schulz A, Hahne J, Hammer B. Expectation maximization transfer learning and its application for bionic hand prostheses. Neurocomputing, 2018, 298: 122−133 doi: 10.1016/j.neucom.2017.11.072 [28] 丁其川, 赵新刚, 李自由, 韩建达. 基于自更新混合分类模型的肌电运动识别方法. 自动化学报, 2019, 45(8): 1464−1474Ding Qi-Chuan, Zhao Xin-Gang, Li Zi-You, Han Jian-Da. An EMG-motion recognition method with self-update hybrid classification model. Acta Automatica Sinica, 2019, 45(8): 1464−1474 [29] Ding Q C, Zhao X G, Han J D, Bu C G, Wu C D. Adaptive hybrid classifier for myoelectric pattern recognition against the interferences of outlier motion, muscle fatigue, and electrode doffing. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019, 27(5): 1071−1080 doi: 10.1109/TNSRE.2019.2911316 [30] 李自由, 王丰焱, 赵新刚, 丁其川, 张道辉, 韩建达. 基于Myo旋转偏移估计与自适应校正的手势识别方法. 自动化学报, 2020, 46(9): 1896−1907Li Zi-You, Wang Feng-Yan, Zhao Xin-Gang, Ding Qi-Chuan, Zhang Dao-Hui, Han Jian-Da. The method for gestures recognition based on Myo rotation shifts estimation and adaptive correction. Acta Automatica Sinica, 2020, 46(9): 1896−1907 [31] Amma C, Krings T, Boer J, Schultz T. Advancing muscle-computer interfaces with high-density electromyography. In: Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems. Seoul, Korea (South): ACM, 2015. 929−938 [32] Ameri A, Akhaee M A, Scheme E, Englehart K. A deep transfer learning approach to reducing the effect of electrode shift in EMG pattern recognition-based control. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2020, 28(2): 370−379 doi: 10.1109/TNSRE.2019.2962189 [33] Li G L, Samuel O W, Lin C, Asogbon M G, Fang P, Idowu P O. Realizing efficient EMG-based prosthetic control strategy. Neural Interface: Frontiers and Applications. Singapore: Springer, 2019. 149−166 [34] Campbell E, Phinyomark A, Al-Timemy A H, Khushaba R N, Petri G, Scheme E. Differences in EMG feature space between able-bodied and amputee subjects for myoelectric control. In: Proceedings of the 9th International IEEE/EMBS Conference on Neural Engineering. San Francisco, USA: IEEE, 2019. 33−36 [35] Kim K T, Guan C, Lee S W. A subject-transfer framework based on single-trial EMG analysis using convolutional neural networks. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019, 28(1): 94−103 [36] Guo W C, Sheng X J, Liu J W, Hua L, Zhang D G, Zhu X Y. Towards zero training for myoelectric control based on a wearable wireless sEMG armband. In: Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics. Busan, Korea (South): IEEE, 2015. 196−201 [37] Stival F, Michieletto S, De Agnoi A, Pagello E. Toward a better robotic hand prosthesis control: Using EMG and IMU features for a subject independent multi joint regression model. In: Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics. Enschede, the Nether lands: IEEE, 2018. 185−192 [38] Phinyomark A, Quaine F, Charbonnier S, Serviere C, Tarpin-Bernard F, Laurillau Y. A feasibility study on the use of anthropometric variables to make muscle–computer interface more practical. Engineering Applications of Artificial Intelligence, 2013, 26(7): 1681−1688 doi: 10.1016/j.engappai.2013.01.004 [39] Xiong A B, Zhao X G, Han J D, Liu G J, Ding Q C. An user-independent gesture recognition method based on sEMG decomposition. In: Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015. 4185−4190 [40] Ison M R, Artemiadis P. Beyond user-specificity for EMG decoding using multiresolution muscle synergy analysis. In: Proceedings of the 2013 ASME Dynamic Systems and Control Conference. Palo Alto, USA: ASME, 2013. [41] Chattopadhyay R, Krishnan N C, Panchanathan S. Topology preserving domain adaptation for addressing subject based variability in sEMG signal. In: Proceedings of the 2011 AAAI Spring Symposium Series. Stanford, USA: AAAI, 2011. [42] Tommasi T, Orabona F, Castellini C, Caputo B. Improving control of dexterous hand prostheses using adaptive learning. IEEE Transactions on Robotics, 2013, 29(1): 207−219 doi: 10.1109/TRO.2012.2226386 [43] Patricia N, Tommasi T, Caputo B. Multi-source adaptive learning for fast control of prosthetics hand. In: Proceedings of the 22nd International Conference on Pattern Recognition. Stockholm, Sweden: IEEE, 2014. 2769−2774 [44] Khushaba R N. Correlation analysis of electromyogram signals for multiuser myoelectric interfaces. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(4): 745−755 doi: 10.1109/TNSRE.2014.2304470 [45] Matsubara T, Morimoto J. Bilinear modeling of EMG signals to extract user-independent features for multiuser myoelectric interface. IEEE Transactions on Biomedical Engineering, 2013, 60(8): 2205−2213 doi: 10.1109/TBME.2013.2250502 [46] Pan L Z, Crouch D L, Huang H. Myoelectric control based on a generic musculoskeletal model: Toward a multi-user neural-machine interface. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018, 26(7): 1435−1442 doi: 10.1109/TNSRE.2018.2838448 [47] Cote-Allard U, Fall C L, Campeau-Lecours A, Gosselin C, Laviolette F, Gosselin B. Transfer learning for sEMG hand gestures recognition using convolutional neural networks. In: Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics. Banff, Canada: IEEE, 2017. 1663−1668 [48] Cobb S, Forbes A. Electromyographic studies of muscular fatigue in man. American Journal of Physiology-Legacy Content, 1923, 65(2): 234−251 doi: 10.1152/ajplegacy.1923.65.2.234 [49] Enoka R M, Duchateau J. Muscle fatigue: What, why and how it influences muscle function. The Journal of Physiology, 2008, 586(1): 11−23 doi: 10.1113/jphysiol.2007.139477 [50] Kim K, Sheng Z Y, Sharma N. Assessing FES-induced muscle fatigue using ultrasound to determine the inverse neuromuscular model for optimal FES input. The Journal of the Acoustical Society of America, 2019, 145(3): 1858 [51] Yousif H A, Zakaria A, Rahim N A, Salleh A F B, Mahmood M, Alfarhan K A, et al. Assessment of muscles fatigue based on surface EMG signals using machine learning and statistical approaches: A review. IOP Conference Series: Materials Science and Engineering, 2019, 705: 012010 doi: 10.1088/1757-899X/705/1/012010 [52] De Luca C J. Myoelectrical manifestations of localized muscular fatigue in humans. Critical Reviews in Biomedical Engineering, 1984, 11(4): 251−279 [53] Merletti R, Knaflitz M, De Luca C J. Myoelectric manifestations of fatigue in voluntary and electrically elicited contractions. Journal of Applied Physiology, 1990, 69(5): 1810−1820 doi: 10.1152/jappl.1990.69.5.1810 [54] Cifrek M, Medved V, Tonkovic S, Ostojic S. Surface EMG based muscle fatigue evaluation in biomechanics. Clinical Biomechanics, 2009, 24(4): 327−340 doi: 10.1016/j.clinbiomech.2009.01.010 [55] Jero S E, Ramakrishnan S. Analysis of muscle fatigue conditions in surface EMG signal with a novel Hilbert marginal spectrum entropy method. In: Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Berlin, Germany: IEEE, 2019. 2675−2678 [56] Bonato P, Roy S H, Knaflitz M, De Luca C J. Time-frequency parameters of the surface myoelectric signal for assessing muscle fatigue during cyclic dynamic contractions. IEEE Transactions on Biomedical Engineering, 2001, 48(7): 745−753 doi: 10.1109/10.930899 [57] Cao H, El Hajj Dib I, Antoni J, Marque C. Analysis of muscular fatigue during cyclic dynamic movement. In: Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Lyon, France: IEEE, 2007. 1880-1883 [58] Thongpanja S, Phinyomark A, Phukpattaranont P, Limsakul C. Mean and median frequency of EMG signal to determine muscle force based on time-dependent power spectrum. Elektronika Ir Elektrotechnika, 2013, 19(3): 51−56 [59] Al-Mulla M R, Sepulveda F. Novel feature modelling the prediction and detection of sEMG muscle fatigue towards an automated wearable system. Sensors, 2010, 10(5): 4838−4854 doi: 10.3390/s100504838 [60] Xu L F, Chen X, Cao S, Zhang X, Chen X. A fatigue involved modification framework for force estimation in fatiguing contraction. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018, 26(11): 2153−2164 doi: 10.1109/TNSRE.2018.2872554 [61] Sheng X J, Ding X C, Guo W C, Hua L, Wang M, Zhu X Y. Toward an integrated multi-modal sEMG/MMG/NIRS sensing system for human-machine interface robust to muscular fatigue. IEEE Sensors Journal, 2021, 21(3): 3702−3712 doi: 10.1109/JSEN.2020.3023742 [62] Al-Mulla M R, Sepulveda F, Colley M, Kattan A. Classification of localized muscle fatigue with genetic programming on sEMG during isometric contraction. In: Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Minneapolis, USA: IEEE, 2009. 2633−2638 [63] Wu Q, Mao J F, Wei C F, Fu S, Law R, Ding L, et al. Hybrid BF–PSO and fuzzy support vector machine for diagnosis of fatigue status using EMG signal features. Neurocomputing, 2016, 173: 483−500 doi: 10.1016/j.neucom.2015.06.002 [64] Wu Q, Xi C, Ding L, Wei C F, Ren H, Law R, et al. Classification of EMG signals by BFA-optimized GSVCM for diagnosis of fatigue status. IEEE Transactions on Automation Science and Engineering, 2017, 14(2): 915−930 doi: 10.1109/TASE.2016.2564419 [65] Jang G, Kim J, Lee S, Choi Y. EMG-based continuous control scheme with simple classifier for electric-powered wheelchair. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3695−3705 doi: 10.1109/TIE.2016.2522385 [66] Artemiadis P K, Kyriakopoulos K J. A switching regime model for the EMG-based control of a robot arm. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(1): 53−63 doi: 10.1109/TSMCB.2010.2045120 [67] Lalitharatne T D, Teramoto K, Hayashi Y, Nanayakkara T, Kiguchi K. Evaluation of fuzzy-neuro modifiers for compensation of the effects of muscle fatigue on EMG-based control to be used in upper-limb power-assist exoskeletons. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2013, 7(4): 736−751 doi: 10.1299/jamdsm.7.736 [68] Mainardi E, Urbano E, Davalli A. Design of a new EMG sensor for upper limb prosthetic control and real time frequency analysis. In: Proceedings of the 2008 MyoElectric Controls/Powered Prosthetics Symposium. Fredericton, Canada, 2008. [69] Peternel L, Tsagarakis N, Caldwell D, Ajoudani A. Adaptation of robot physical behaviour to human fatigue in human-robot co-manipulation. In: Proceedings of the 16th IEEE-RAS International Conference on Humanoid Robots. Cancun, Mexico: IEEE, 2016. 489−494 [70] Scheme E, Biron K, Englehart K. Improving myoelectric pattern recognition positional robustness using advanced training protocols. In: Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Boston, USA: IEEE, 2011. 4828−4831 [71] Liu J W, Zhang D G, He J Y, Zhu X Y. Effect of dynamic change of arm position on myoelectric pattern recognition. In: Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics. Guangzhou, China: IEEE, 2012. 1470−1475 [72] Jiang N, Muceli S, Graimann B, Farina D. Effect of arm position on the prediction of kinematics from EMG in amputees. Medical and Biological Engineering and Computing, 2013, 51(1−2): 143−151 [73] Yang D P, Yang W, Huang Q, Liu H. Classification of multiple finger motions during dynamic upper limb movements. IEEE Journal of Biomedical and Health Informatics, 2017, 21(1): 134−141 doi: 10.1109/JBHI.2015.2490718 [74] Beringer C R, Mansouri M, Fisher L E, Collinger J L, Munin M C, Boninger M L, et al. The effect of wrist posture on extrinsic finger muscle activity during single joint movements. Scientific Reports, 2020, 10(1): 8377 doi: 10.1038/s41598-020-65167-x [75] Scheme E, Fougner A, Stavdahl O, Chan A D C, Englehart K. Examining the adverse effects of limb position on pattern recognition based myoelectric control. In: Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology. Buenos Aires, Argentina: IEEE, 2010. 6337−6340 [76] Fougner A, Scheme E, Chan A D C, Englehart K, Stavdahl O. Resolving the limb position effect in myoelectric pattern recognition. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2011, 19(6): 644−651 doi: 10.1109/TNSRE.2011.2163529 [77] Park K H, Suk H I, Lee S W. Position-independent decoding of movement intention for proportional myoelectric interfaces. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(9): 928−939 doi: 10.1109/TNSRE.2015.2481461 [78] Radmand A, Scheme E, Englehart K. On the suitability of integrating accelerometry data with electromyography signals for resolving the effect of changes in limb position during dynamic limb movement. Journal of Prosthetics and Orthotics, 2014, 26(4): 185−193 doi: 10.1097/JPO.0000000000000041 [79] Geng Y J, Zhou P, Li G L. Toward attenuating the impact of arm positions on electromyography pattern-recognition based motion classification in transradial amputees. Journal of NeuroEngineering and Rehabilitation, 2012, 9: 74 doi: 10.1186/1743-0003-9-74 [80] Khushaba R N, Shi L, Kodagoda S. Time-dependent spectral features for limb position invariant myoelectric pattern recognition. In: Proceedings of the 2012 International Symposium on Communications and Information Technologies. Gold Coast, Australia: IEEE, 2012. 1015−1020 [81] Khushaba R N, Takruri M, Miro J V, Kodagoda S. Towards limb position invariant myoelectric pattern recognition using time-dependent spectral features. Neural Networks, 2014, 55: 42−58 doi: 10.1016/j.neunet.2014.03.010 [82] Khushaba R N, Al-Timemy A, Kodagoda S, Nazarpour K. Combined influence of forearm orientation and muscular contraction on EMG pattern recognition. Expert Systems with Applications, 2016, 61: 154−161 doi: 10.1016/j.eswa.2016.05.031 [83] Betthauser J L, Hunt C L, Osborn L E, Kaliki R R, Thakor N V. Limb-position robust classification of myoelectric signals for prosthesis control using sparse representations. In: Proceedings of the 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Orlando, USA: IEEE, 2016. 6373−6376 [84] Betthauser J L, Hunt C L, Osborn L E, Masters M R, Levay G, Kaliki R R, et al. Limb position tolerant pattern recognition for myoelectric prosthesis control with adaptive sparse representations from extreme learning. IEEE Transactions on Biomedical Engineering, 2018, 65(4): 770−778 doi: 10.1109/TBME.2017.2719400 [85] 丁其川, 赵新刚, 韩建达. 基于肌电信号容错分类的手部动作识别. 机器人, 2015, 37(1): 9−16Ding Qi-Chuan, Zhao Xin-Gang, Han Jian-Da. Recognizing hand motions based on fault-tolerant classification with EMG signals. Robot, 2015, 37(1): 9−16 [86] Akmal M, Zubair S, Jochumsen M, Kamavuako E N, Niazi I K. A tensor-based method for completion of missing electromyography data. IEEE Access, 2019, 7: 104710−104720 doi: 10.1109/ACCESS.2019.2931371 [87] Bell D G. The influence of air temperature on the EMG/force relationship of the quadriceps. European Journal of Applied Physiology and Occupational Physiology, 1993, 67(3): 256−260 doi: 10.1007/BF00864225 [88] Ladrova M, Martinek R, Nedoma J, Fajkus M. Methods of power line interference elimination in EMG signal. Journal of Biomimetics, Biomaterials and Biomedical Engineering, 2019, 40: 64−70 doi: 10.4028/www.scientific.net/JBBBE.40.64 [89] Zheng Y, Hu X G. Interference removal from electromyography based on independent component analysis. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019, 27(5): 887−894 doi: 10.1109/TNSRE.2019.2910387 [90] Fitts P M, Posner M I. Human Performance. Belmont, USA: Brooks/Cole, 1967. 7-16 [91] Orabona F, Castellini C, Caputo B, Fiorilla A E, Sandini G. Model adaptation with least-squares SVM for adaptive hand prosthetics. In: Proceedings of the 2009 IEEE International Conference on Robotics and Automation. Kobe, Japan: IEEE, 2009. 2897−2903 [92] Park E, Meek S G. Fatigue compensation of the electromyographic signal for prosthetic control and force estimation. IEEE Transactions on Biomedical Engineering, 1993, 40(10): 1019−1023 doi: 10.1109/10.247800 [93] Camata T V, Dantas J L, Abrao T, Brunetto M A O C, Moraes A C, Altimari L R. Fourier and wavelet spectral analysis of EMG signals in supramaximal constant load dynamic exercise. In: Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology. Buenos Aires, Argentina: IEEE, 2010. 1364−1367 [94] Kumar D K, Pah N D, Bradley A. Wavelet analysis of surface electromyography. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2003, 11(4): 400−406 doi: 10.1109/TNSRE.2003.819901 [95] Du Y, Jin W G, Wei W T, Hu Y, Geng W D. Surface EMG-based inter-session gesture recognition enhanced by deep domain adaptation. Sensors, 2017, 17(3): 458 doi: 10.3390/s17030458 [96] Lobov S, Krilova N, Kastalskiy I, Kazantsev V, Makarov V A. Latent factors limiting the performance of sEMG-interfaces. Sensors, 2018, 18(4): 1122 doi: 10.3390/s18041122 [97] Sapsanis C, Georgoulas G, Tzes A, Lymberopoulos D. Improving EMG based classification of basic hand movements using EMD. In: Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Osaka, Japan: IEEE, 2013. 5754−5757 [98] Tsinganos P, Cornelis B, Cornelis J, Jansen B, Skodras A. Improved gesture recognition based on sEMG signals and TCN. In: Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing. Brighton, United Kingdom: IEEE, 2019. 1169−1173 [99] Cote-Allard U, Fall C L, Drouin A, Campeau-Lecours A, Gosselin C, Glette K, et al. Deep learning for electromyographic hand gesture signal classification using transfer learning. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019, 27(4): 760−771 doi: 10.1109/TNSRE.2019.2896269 [100] Cote-Allard U, Campbell E, Phinyomark A, Laviolette F, Gosselin B, Scheme E. Interpreting deep learning features for myoelectric control: A comparison with handcrafted features. Frontiers in Bioengineering and Biotechnology, 2020, 8: 158 doi: 10.3389/fbioe.2020.00158 [101] Christ M, Braun N, Neuffer J, Kempa-Liehr A W. Time series feature extraction on basis of scalable hypothesis tests (tsfresh–a python package). Neurocomputing, 2018, 307: 72−77 doi: 10.1016/j.neucom.2018.03.067 [102] Fındık M, Yılmaz S, Koseoglu M. Random forest classification of finger movements using electromyogram (EMG) signals. In: Proceedings of the 2020 IEEE Sensors. Rotterdam, the Netherlands: IEEE, 2020. [103] Zhuang F Z, Qi Z Y, Duan K Y, Xi D B, Zhu Y C, Zhu H S, et al. A comprehensive survey on transfer learning. Proceedings of the IEEE, 2021, 109(1): 43−76 doi: 10.1109/JPROC.2020.3004555 [104] Fernando B, Habrard A, Sebban M, Tuytelaars T. Unsupervised visual domain adaptation using subspace alignment. In: Proceedings of the 2013 IEEE International Conference on Computer Vision. Sydney, Australia: IEEE, 2013. 2960−2967 [105] Schiel F, Hagengruber A, Vogel J, Triebel R. Incremental learning of EMG-based control commands using Gaussian processes. In: Proceedings of the 2020 Conference on Robot Learning (CoRL). 2020. [106] Wei W T, Dai Q F, Wong Y, Hu Y, Kankanhalli M, Geng W D. Surface-electromyography-based gesture recognition by multi-view deep learning. IEEE Transactions on Biomedical Engineering, 2019, 66(10): 2964−2973 doi: 10.1109/TBME.2019.2899222 [107] Maldonado R, Harabagiu S M. Active deep learning for the identification of concepts and relations in electroencephalography reports. Journal of Biomedical Informatics, 2019, 98: 103265 doi: 10.1016/j.jbi.2019.103265 [108] Clarke A K, Atashzar S F, Del Vecchio A, Barsakcioglu D Y, Muceli S, Bentley P, et al. Deep learning for robust decomposition of high-density surface EMG signals. IEEE Transactions on Biomedical Engineering, 2021, 68(2): 526−534 doi: 10.1109/TBME.2020.3006508 [109] De Luca C J, Adam A, Wotiz R, Gilmore L D, Nawab S H. Decomposition of surface EMG signals. Journal of Neurophysiology, 2006, 96(3): 1646−1657 doi: 10.1152/jn.00009.2006 -

 下载:
下载:



计量
- 文章访问数: 3126
- HTML全文浏览量: 3376
- PDF下载量: 777
- 被引次数: 0
