

-
摘要: 近年来, 随着海洋资源的不断开发与海洋工程的全球化推进, 深海起重机得到了广泛应用, 其控制问题也引起研究人员的极大关注. 在深海作业环境中, 由于吊运过程受到水流作用力的影响, 负载摆动幅度增大, 系统状态量间非线性耦合关系增强, 使系统控制难度加大. 为此, 本文针对深海起重机系统提出了一种实时轨迹规划方法. 具体而言, 通过分析系统动力学特性和状态变量之间复杂的耦合关系, 提出了一种实时规划轨迹的方法, 并从理论上证明了该方法可在使台车准确快速到达指定位置的同时, 有效抑制负载摆动. 最后, 一系列仿真结果证明了所提方法的良好性能.Abstract: In recent years, with the continuous exploitation of marine resources and the global development of marine engineering, deep sea-oriented crane systems have been widely used, and their control problems have also attracted great attention. Under the deep sea working environment, since the transportation process is influenced by the hydrodynamic force, the payload's vibration amplitude increases, and the nonlinear coupling relationship between state variables becomes stronger, making the control problem more challenging. To this end, this paper proposes a real-time trajectory planning method for the deep sea crane system. Specifically, by analyzing the dynamics and the complex coupling relationship between state variables, a real-time trajectory planning method is proposed, and it is theoretically proved that this method can achieve fast and accurate trolley positioning and effective cargo swing suppression. Finally, numerical simulation results indicate the satisfactory performance of the designed method.
-
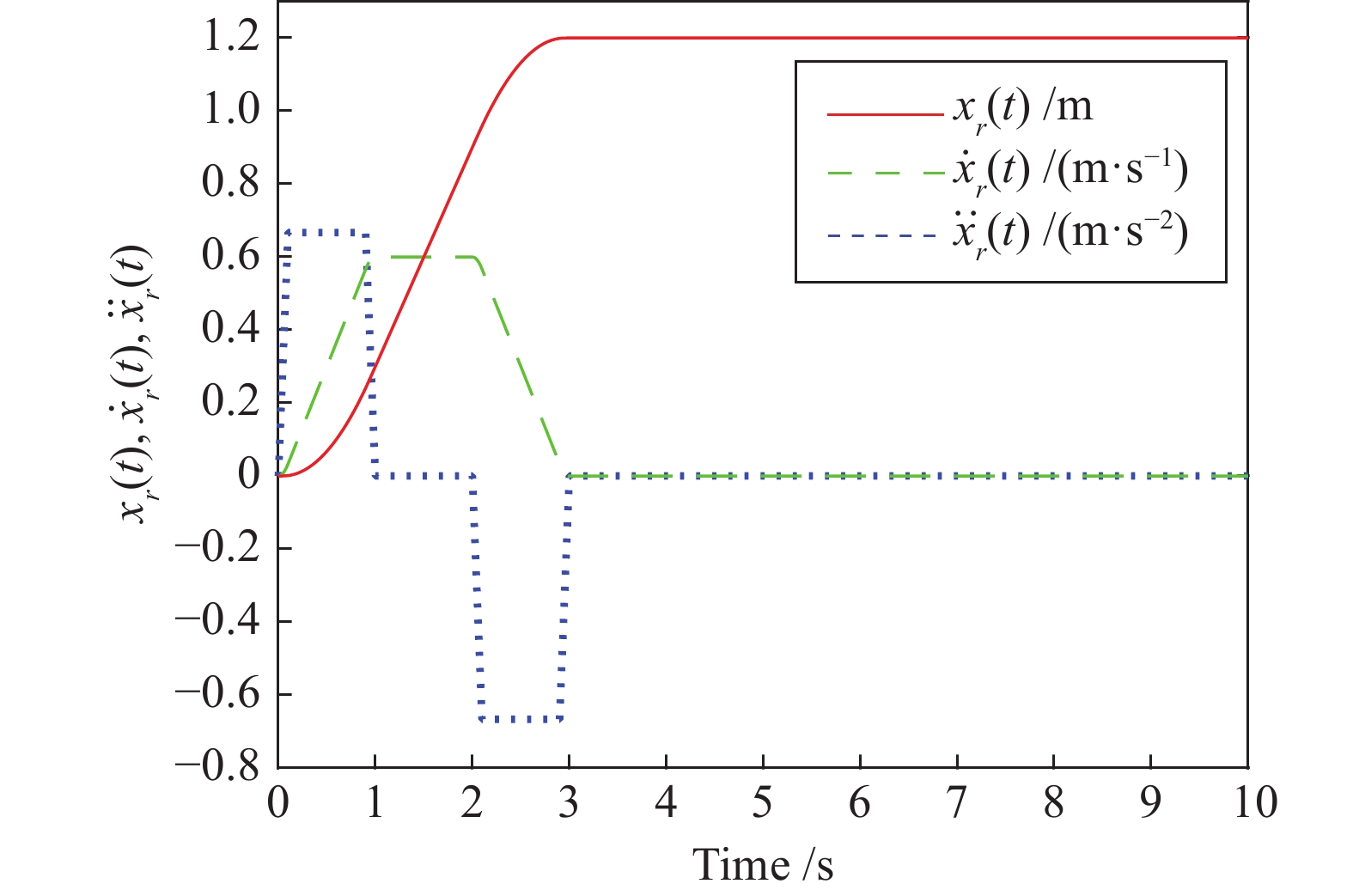
图 3 参考位移、速度、加速度轨迹
Fig. 3 The reference displacement, velocity, and acceleration trajectories
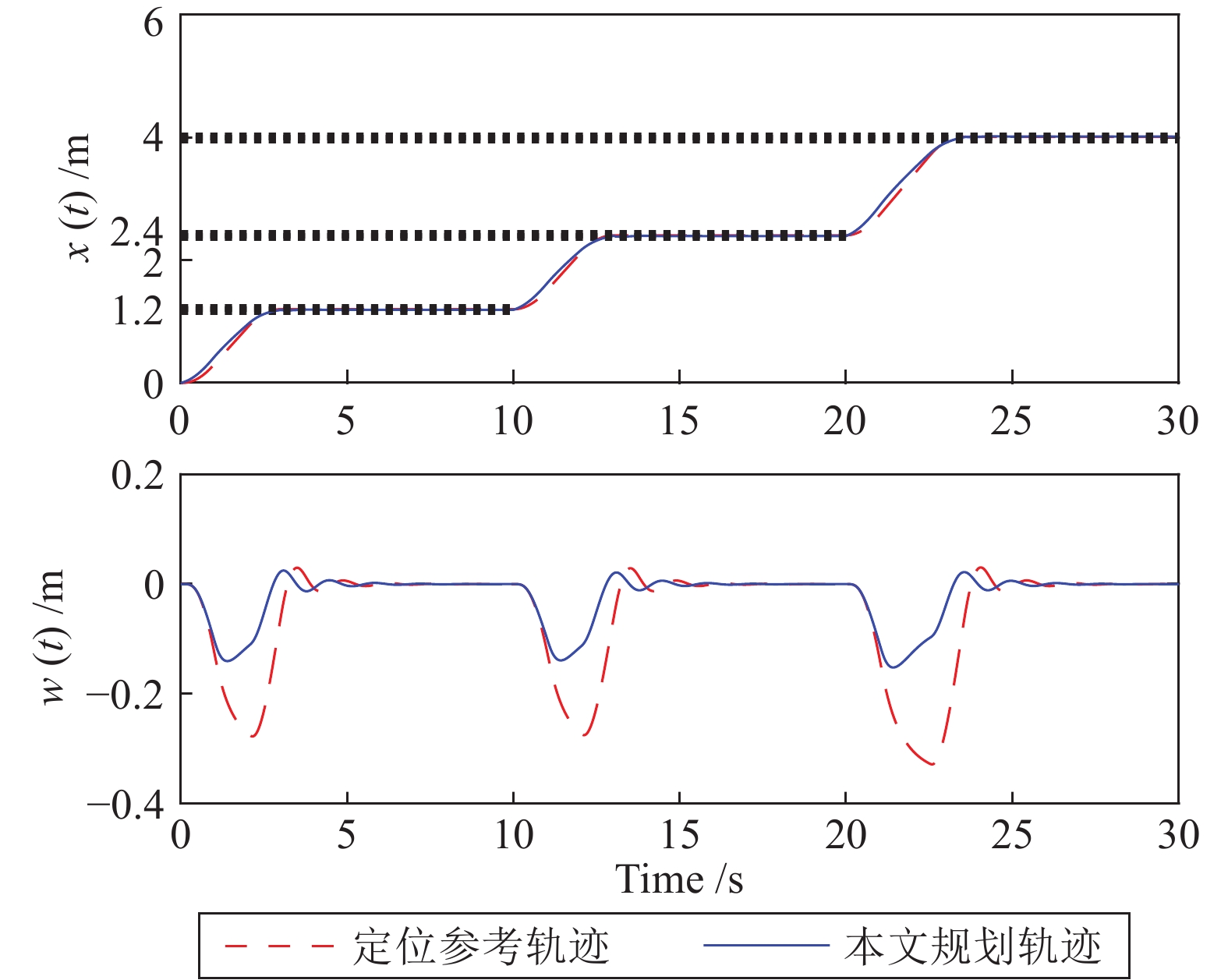
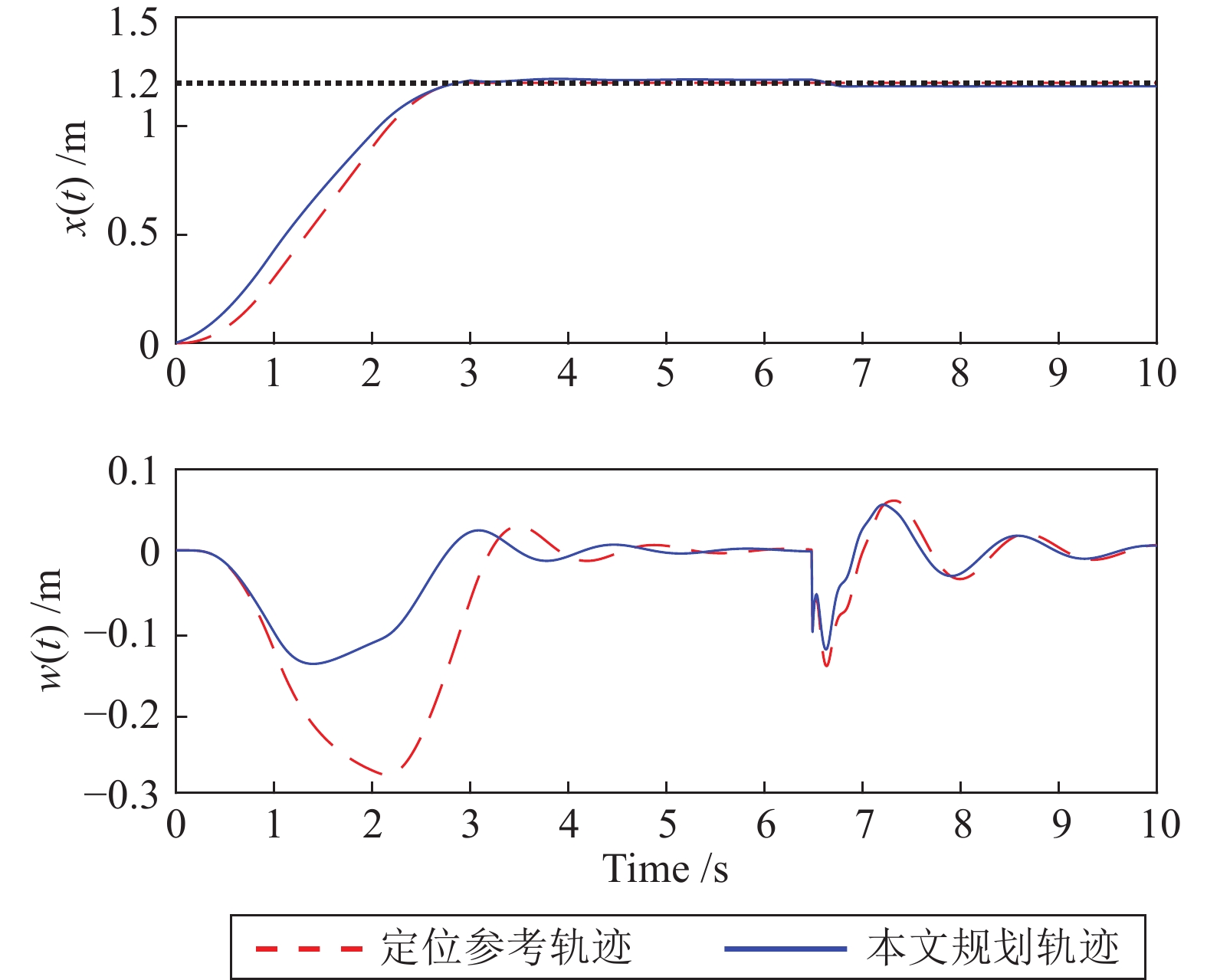
图 8 验证所提方法实时性的仿真结果
Fig. 8 Simulation results to verify the real-time performance of the proposed method
表 1 系统参数
Table 1 System parameters
参数 物理意义 单位 $m_r$ 负载质量 kg $m_t$ 台车质量 kg $d$ 负载截面直径 m $l$ 负载长度 m $E$ 杨氏模量 GPa $c$ 粘性阻尼系数 N·s/m $\rho_w$ 水密度 kg/m3 $C_a$ 附加质量系数 — $C_d$ 阻力系数 —  下载: 导出CSV
下载: 导出CSV
表 2 系统参数仿真值
Table 2 Simulation values of system parameters
参数 取值 单位 $m_r$ 0.37 kg $m_t$ 38.0 kg $d$ 0.008 m $l$ 1 m $E$ 248.3 GPa $c$ 0.6 N·s/m $\rho_w$ 1000 kg/m3 $C_a$ 0.93 — $C_d$ 1.28 —
下载: 导出CSV
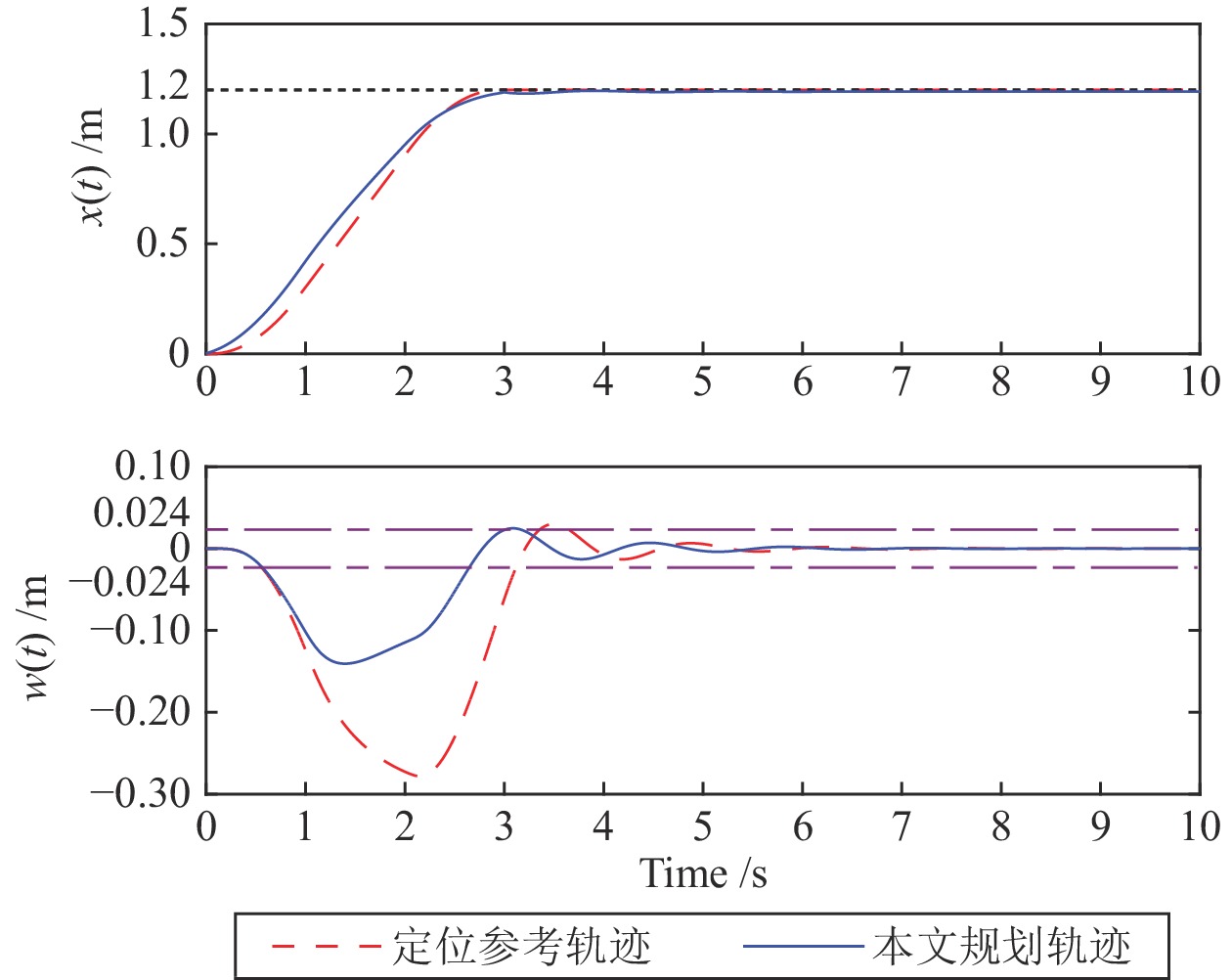
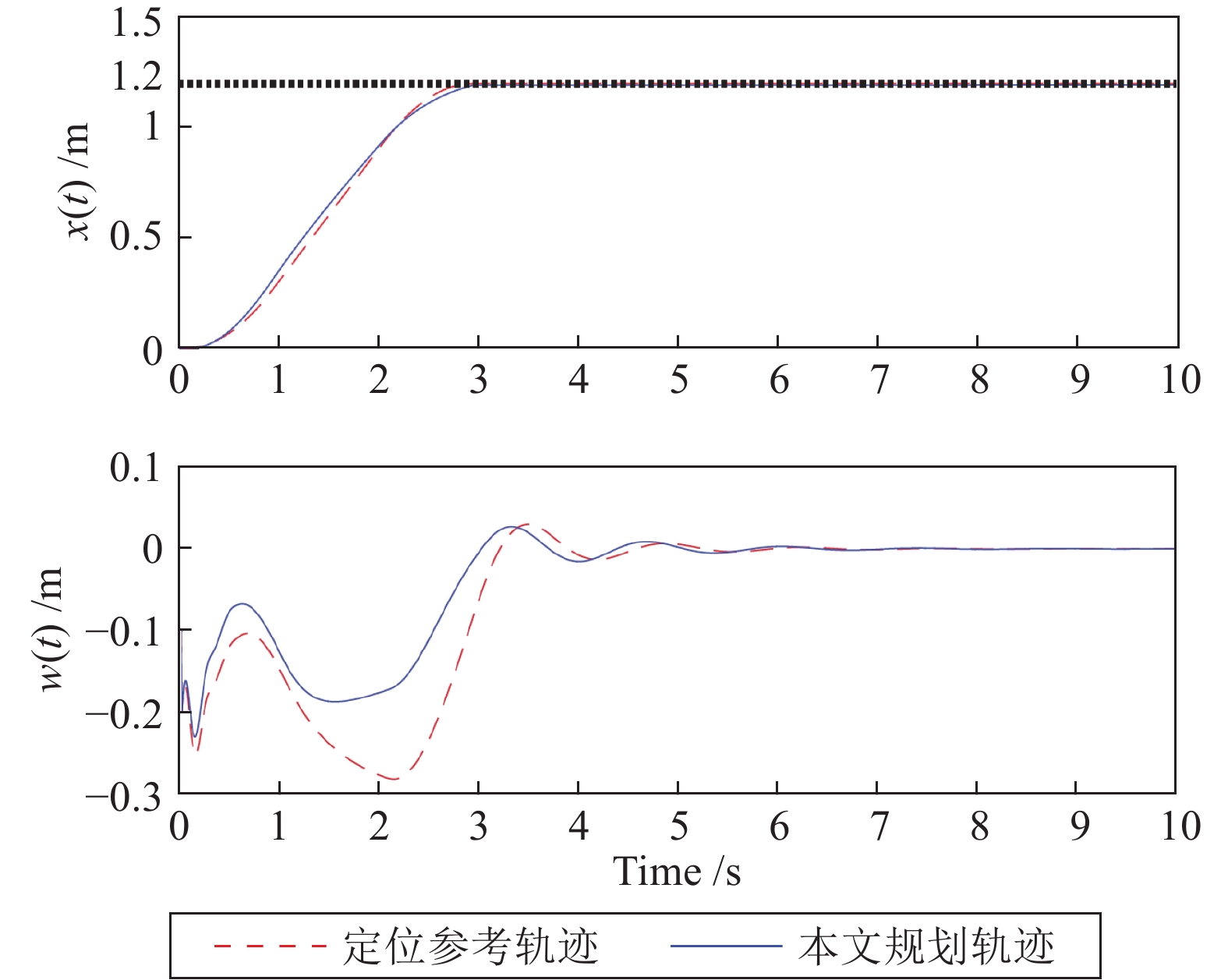
表 3 无外部扰动时量化指标对比结果
Table 3 Comparison results of quantitative indices without external disturbance
正向摆动
幅度 (m)反向摆动
幅度 (m)进入相对稳态
时间 (s)定位参考轨迹 –0.278 0.032 3.7 本文规划轨迹 –0.142 0.024 3.1
下载: 导出CSV
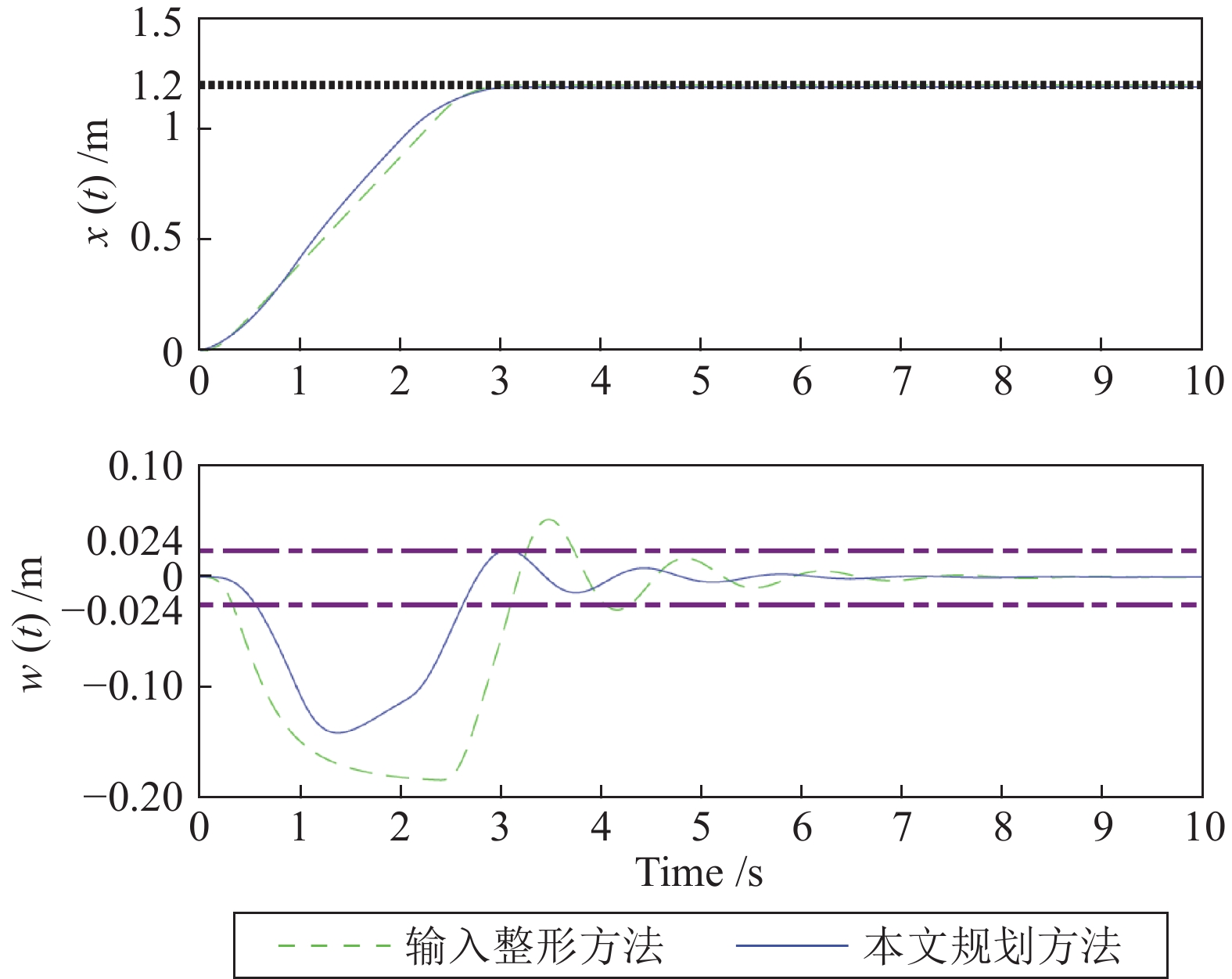
表 4 与输入整形方法的量化指标对比结果
Table 4 Comparison results of quantitative indices with input shaping method
正向摆动
幅度 (m)反向摆动
幅度 (m)进入相对稳态
时间 (s)输入整形方法 –0.183 0.052 4.3 本文规划方法 –0.142 0.024 3.1
下载: 导出CSV
-
[1] 刘殿通, 易建强, 谭民. 一类非线性系统的自适应滑模模糊控制. 自动化学报, 2004, 30(1): 144−150Liu Dian-Tong, Yi Jian-Qiang, Tan Min. Adaptive sliding mode fuzzy control for a class of nonlinear systems. Acta Automatica Sinica, 2004, 30(1): 144−150 [2] 武宪青, 何熊熊. 欠驱动RTAC系统的自适应耦合控制器设计. 自动化学报, 2015, 41(5): 1047−1052Wu Xian-Qing, He Xiong-Xiong. Adaptive coupling controller design for underactuated RTAC systems. Acta Automatica Sinica, 2015, 41(5): 1047−1052 [3] 魏萃, 柴天佑, 贾瑶, 王良勇. 补偿信号法驱动的Pendubot自适应平衡控制. 自动化学报, 2019, 45(6): 1146−1156Wei Cui, Chai Tian-You, Jia Yao, Wang Liang-Yong. Compensation signal driven adaptive balance control of the pendubot. Acta Automatica Sinica, 2019, 45(6): 1146−1156 [4] He W, Meng T T, He X Y, Ge S S. Unified iterative learning control for flexible structures with input constraints. Automatica, 2018, 96: 326−336 doi: 10.1016/j.automatica.2018.06.051 [5] 赖旭芝, 张镇, 吴敏. 欠驱动三连杆机械臂能量解耦控制策略. 自动化学报, 2011, 37(1): 67−73 doi: 10.3724/SP.J.1004.2011.00067Lai Xu-Zhi, Zhang Zhen, Wu Min. Energy decoupling control strategy for three-link underactuated manipulator. Acta Automatica Sinica, 2011, 37(1): 67−73 doi: 10.3724/SP.J.1004.2011.00067 [6] Sun W, Lin J W, Su S F, Wang N, Er M. Reduced adaptive fuzzy decoupling control for lower limb exoskeleton. IEEE Transactions on Cybernetics, 2020, DOI: 10.1109/TCYB.2020.2972582 [7] 梁潇, 方勇纯, 孙宁. 平面四旋翼无人飞行器运送系统的轨迹规划与跟踪控制器设计. 控制理论与应用, 2015, 32(11): 1430−1438Liang Xiao, Fang Yong-Chun, Sun Ning. Trajectory planning and tracking controller design for a planar quadrotor unmanned aerial vehicle transportation system. Control Theory and Applications, 2015, 32(11): 1430−1438 [8] 武宪青, 徐可心, 张益波. 基于输出反馈的欠驱动TORA系统的有界输入控制. 自动化学报, 2020, 46(1): 200−204Wu Xian-Qing, Xu Ke-Xin, Zhang Yi-Bo. Output-based feedback control of underactuated TORA systems by bounded inputs. Acta Automatica Sinica, 2020, 46(1): 200−204 [9] 胡洲, 王志胜, 甄子洋. 带输入饱和的欠驱动吊车非线性信息融合控制. 自动化学报, 2014, 40(7): 1522−1527Hu Zhou, Wang Zhi-Sheng, Zhen Zi-Yang. Nonlinear information fusion control for underactuated cranes with input saturation. Acta Automatica Sinica, 2014, 40(7): 1522−1527 [10] Tuan L A, Lee S G. Modeling and advanced sliding mode controls of crawler cranes considering wire rope elasticity and complicated operations. Mechanical Systems and Signal Processing, 2018, 103: 250−263 doi: 10.1016/j.ymssp.2017.09.045 [11] 孙宁, 方勇纯, 王鹏程, 张雪波. 欠驱动三维桥式吊车系统自适应跟踪控制器设计. 自动化学报, 2010, 36(9): 1287−1294 doi: 10.3724/SP.J.1004.2010.01287Sun Ning, Fang Yong-Chun, Wang Peng-Cheng, Zhang Xue-Bo. Adaptive trajectory tracking control of underactuated 3-dimensional overhead crane systems. Acta Automatica Sinica, 2010, 36(9): 1287−1294 doi: 10.3724/SP.J.1004.2010.01287 [12] Rigatos G, Siano P, Abbaszadeh M. Nonlinear H-infinity control for 4-DOF underactuated overhead cranes. Transactions of the Institute of Measurement and Control, 2018, 40(7): 2364−2377 doi: 10.1177/0142331217703702 [13] 孙宁, 方勇纯, 陈鹤. 欠驱动桥式吊车消摆跟踪控制. 控制理论与应用, 2015, 32(3): 326−333 doi: 10.7641/CTA.2015.31139Sun Ning, Fang Yong-Chun, Chen He. Antiswing tracking control for underactuated bridge cranes. Control Theory and Applications, 2015, 32(3): 326−333 doi: 10.7641/CTA.2015.31139 [14] Peng J H, Huang J, Singhose W. Payload twisting dynamics and oscillation suppression of tower cranes during slewing motions. Nonlinear Dynamics, 2019, 98(2): 1041−1048 doi: 10.1007/s11071-019-05247-4 [15] Zhang M H, Zhang Y F, Ouyang H M, Ma C H, Cheng X G. Adaptive integral sliding mode control with payload sway reduction for 4-DOF tower crane systems. Nonlinear Dynamics, 2020, 99: 2727−2741 doi: 10.1007/s11071-020-05471-3 [16] Yang T, Sun N, Chen H, Fang Y C. Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(3): 901−914 doi: 10.1109/TNNLS.2019.2910580 [17] 欧阳慧珉, 王健, 张广明, 梅磊, 邓歆. 基于新型滑模算法的双摆旋转起重机消摆跟踪控制. 自动化学报, 2019, 45(7): 1344−1353Ouyang Hui-Min, Wang Jian, Zhang Guang-Ming, Mei Lei, Deng Xin. Tracking and anti-sway control for double-pendulum rotary cranes using novel sliding mode algorithm. Acta Automatica Sinica, 2019, 45(7): 1344−1353 [18] Qian D W, Tong S W, Lee S G. Fuzzy-logic-based control of payloads subjected to double-pendulum motion in overhead cranes. Automation in Construction, 2016, 65(C): 133−143 [19] Fang Y, Hu J, Liu W H, Shao Q Q, Qi J, Peng Y H. Smooth and time-optimal S-curve trajectory planning for automated robots and machines. Mechanism and Machine Theory, 2019, 137: 127−153 doi: 10.1016/j.mechmachtheory.2019.03.019 [20] Wang H, Heng W, Huang J H, Zhao B, Quan L. Smooth point-to-point trajectory planning for industrial robots with kinematical constraints based on high-order polynomial curve. Mechanism and Machine Theory, 2019, 139: 284−293 doi: 10.1016/j.mechmachtheory.2019.05.002 [21] Yin Z, He W, Yang C G. Tracking control of a marine surface vessel with full-state constraints. International Journal of Systems Science, 2017, 48(3): 535−546 doi: 10.1080/00207721.2016.1193255 [22] 于欣波, 贺威, 薛程谦, 孙永坤, 孙长银. 基于扰动观测器的机器人自适应神经网络跟踪控制研究. 自动化学报, 2019, 45(7): 1307−1324Yu Xin-Bo, He Wei, Xue Cheng-Qian, Sun Yong-Kun, Sun Chang-Yin. Disturbance observer-based adaptive neural network tracking control for robots. Acta Automatica Sinica, 2019, 45(7): 1307−1324 [23] 王鹏程, 方勇纯, 江紫亚. 一种直接基于摆角约束的欠驱动桥式吊车轨迹规划方法. 自动化学报, 2014, 40(11): 2414−2419 doi: 10.1016/S1874-1029(14)60397-9Wang Peng-Cheng, Fang Yong-Chun, Jiang Zi-Ya. A direct swing constraint-based trajectory planning method for underactuated overhead cranes. Acta Automatica Sinica, 2014, 40(11): 2414−2419 doi: 10.1016/S1874-1029(14)60397-9 [24] 孙宁, 方勇纯, 钱彧哲. 带有状态约束的双摆效应吊车轨迹规划. 控制理论与应用, 2014, 31(7): 974−980 doi: 10.7641/CTA.2014.40054Sun Ning, Fang Yong-Chun, Qian Yu-Zhe. Motion planning for cranes with double pendulum effects subject to state constraints. Control Theory and Applications, 2014, 31(7): 974−980 doi: 10.7641/CTA.2014.40054 [25] 陈鹤, 方勇纯, 孙宁, 钱彧哲. 基于伪谱法的双摆吊车时间最优消摆轨迹规划策略. 自动化学报, 2016, 42(1): 153−160Chen He, Fang Yong-Chun, Sun Ning, Qian Yu-Zhe. Pseudospectral method based time optimal anti-swing trajectory planning for double pendulum crane systems. Acta Automatica Sinica, 2016, 42(1): 153−160 [26] Sun N, Wu Y M, Chen H, Fang Y C. An energy-optimal solution for transportation control of cranes with double pendulum dynamics: Design and experiments. Mechanical Systems and Signal Processing, 2018, 102: 87−101 doi: 10.1016/j.ymssp.2017.09.027 [27] Boscariol P, Richiedei D. Robust point-to-point trajectory planning for nonlinear underactuated systems: Theory and experimental assessment. Robotics and Computer-Integrated Manufacturing, 2018, 50: 256−265 doi: 10.1016/j.rcim.2017.10.001 [28] Zhang M H, Ma X, Rong X W, Tian X C, Li Y B. Error tracking control for underactuated overhead cranes against arbitrary initial payload swing angles. Mechanical Systems and Signal Processing, 2017, 84: 268−285 doi: 10.1016/j.ymssp.2016.07.028 [29] Liu Z Q, Yang T, Sun N, Fang Y C. An antiswing trajectory planning method with state constraints for 4-DOF tower cranes: Design and experiments. IEEE Access, 2019, 7: 62142−62151 doi: 10.1109/ACCESS.2019.2915999 [30] Otto S, Seifried R. Real-time trajectory control of an overhead crane using servo-constraints. Multibody System Dynamics, 2018, 42(1): 1−17 doi: 10.1007/s11044-017-9569-4 [31] Li F, Zhang C H, Sun B. A minimum-time motion online planning method for underactuated overhead crane systems. IEEE Access, 2019, 7: 54586−54594 doi: 10.1109/ACCESS.2019.2912460 [32] Shah U H, Hong K S, Choi S H. Open-loop vibration control of an underwater system: Application to refueling machine. IEEE/ASME Transactions on Mechatronics, 2017, 22(4): 1622−1632 doi: 10.1109/TMECH.2017.2706304 [33] Sun N, Fang Y C, Chen H, Fu Y, Lu B. Nonlinear stabilizing control for ship-mounted cranes with ship roll and heave movements: design, analysis, and experiments. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 48(10): 1781−1793 -

 下载:
下载:


计量
- 文章访问数: 1859
- HTML全文浏览量: 443
- PDF下载量: 349
- 被引次数: 0
