

Multi-objective Optimal Scheduling of Integrated Energy Systems Based On Distributed Neurodynamic Optimization
-
摘要: 研究了基于神经动态优化的综合能源系统(Integrated energy systems, IES)分布式多目标优化调度问题. 首先, 将IES元件单元(包含负荷)作为独立的决策主体, 联合考量其运行成本和排放成本, 并计及多能源设备间的传输损耗, 提出了IES多目标优化调度模型, 该模型可描述为一类非凸多目标优化问题. 其次, 针对此类问题的求解, 提出了一种基于神经动力学系统的分布式多目标优化算法, 该算法基于动态权重的神经网络模型, 可以解决不可分离的不等式约束问题. 该算法计算负担小, 收敛速度快, 并且易于硬件实现. 仿真结果表明, 所提算法能同时协调综合能源系统的经济性和环境性这两个冲突的目标, 且获得了整个帕累托前沿, 有效降低了综合能源系统的污染物排放量和综合运行成本.Abstract: This paper studies the distributed multi-objective optimized scheduling problem of integrated energy systems (IES) based on neurodynamic optimization. Firstly, IES component units (including load) are treated as independent decision-making entities, considering their fuel cost and emission cost, and taking into account the transmission loss between multi-energy devices, an IES multi-objective multi-objective optimized scheduling model is proposed, which can be described as a non-convex multi-objective optimization problem. Secondly, in order to solve such problems, a distributed multi-objective optimization algorithm based on the neurodynamics system is proposed. This algorithm is based on the dynamic weight neural network model, which can solve the inseparability inequality constraint problem. The algorithm has the advantages of small computational burden, fast convergence speed and easy hardware implementation. The simulation results show that the proposed method can simultaneously optimize the two conflicting objectives of cost and emission of the integrated energy systems, and obtain the whole Pareto front, which can effectively reduce the pollutant discharge and integrated operation costs of the integrated energy systems.
-
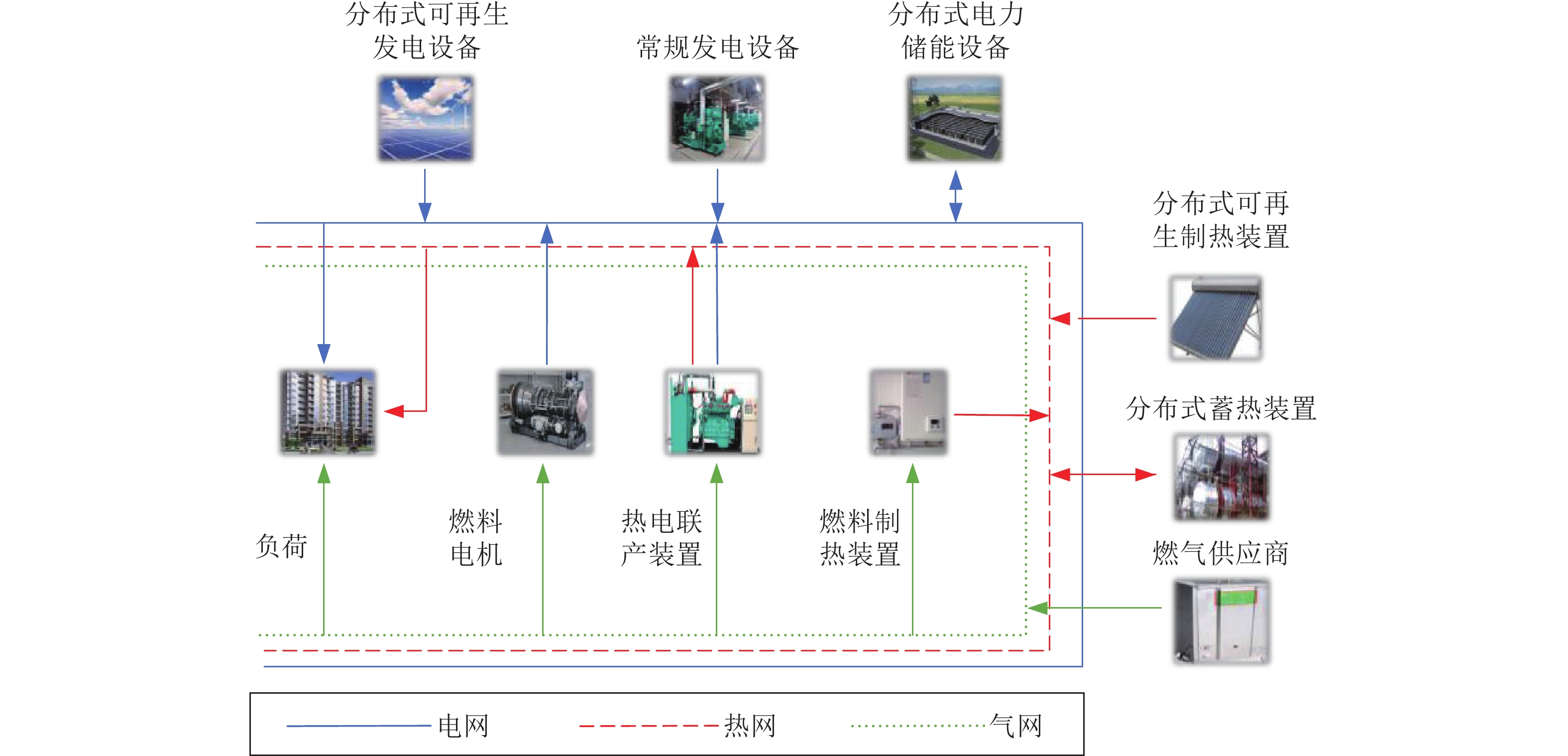
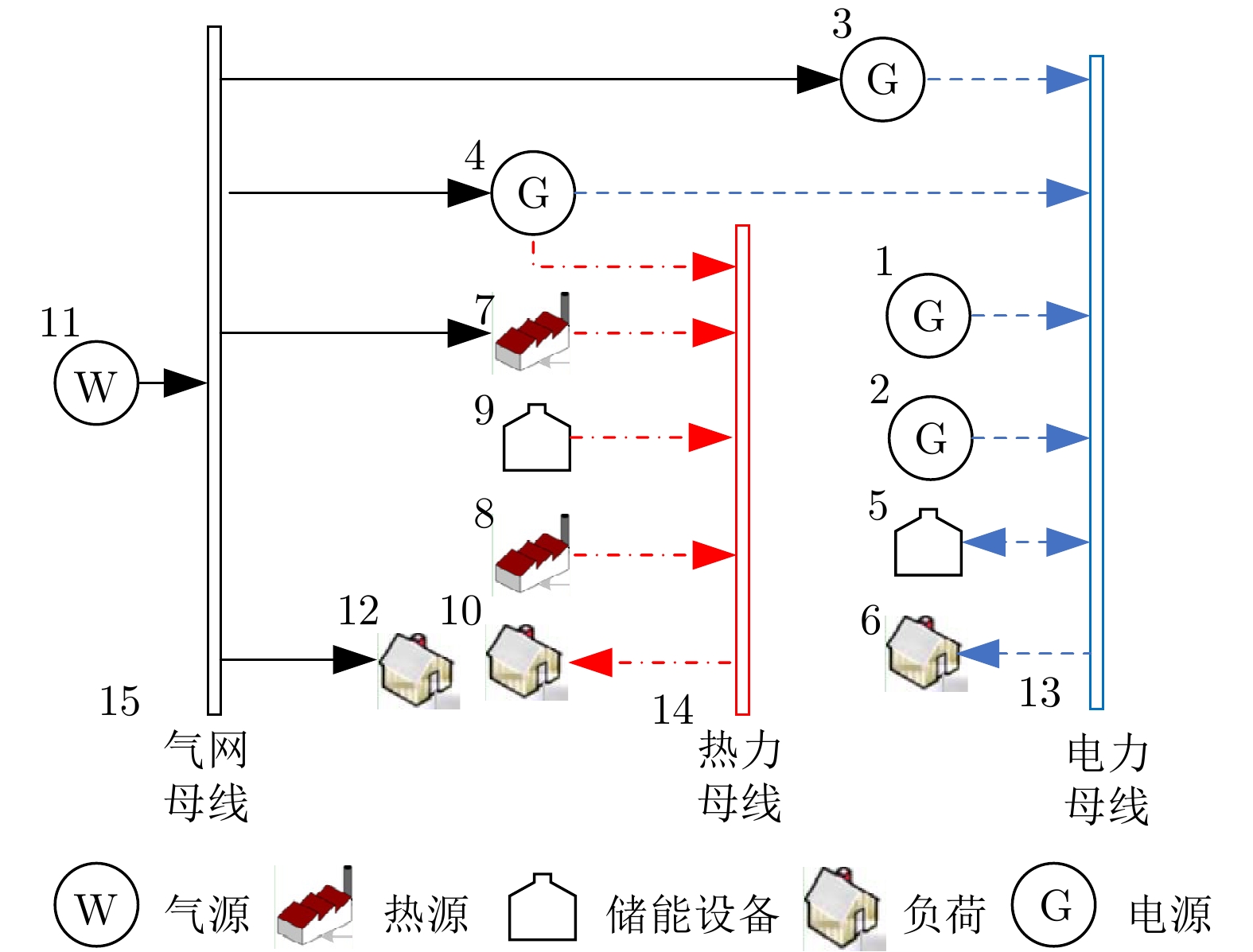
图 1 本文所考虑的综合能源系统结构图
Fig. 1 Architecture of integrated energy system considered in this paper

图 2 用于分布式优化的
$RN{N_i}$ 框图Fig. 2 Block diagram of
$RN{N_i}$ for distributed optimization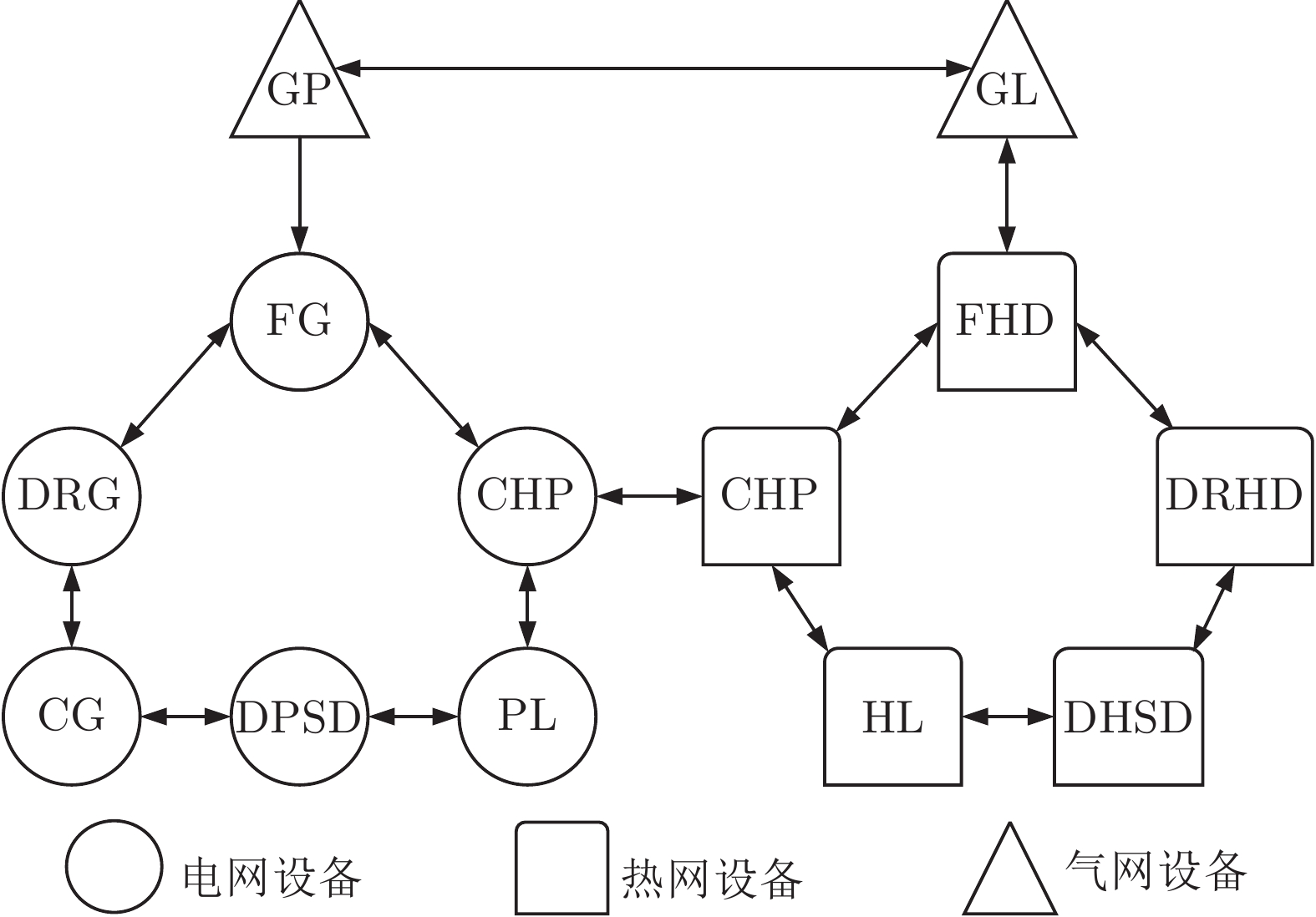
图 4 电热气系统的信息拓扑图
Fig. 4 Information topology of the integrated electro-heating-gas system

图 3 所提出的分布式方法在IES的实现过程
Fig. 3 Implementation diagram of the proposed distributed approach for IES
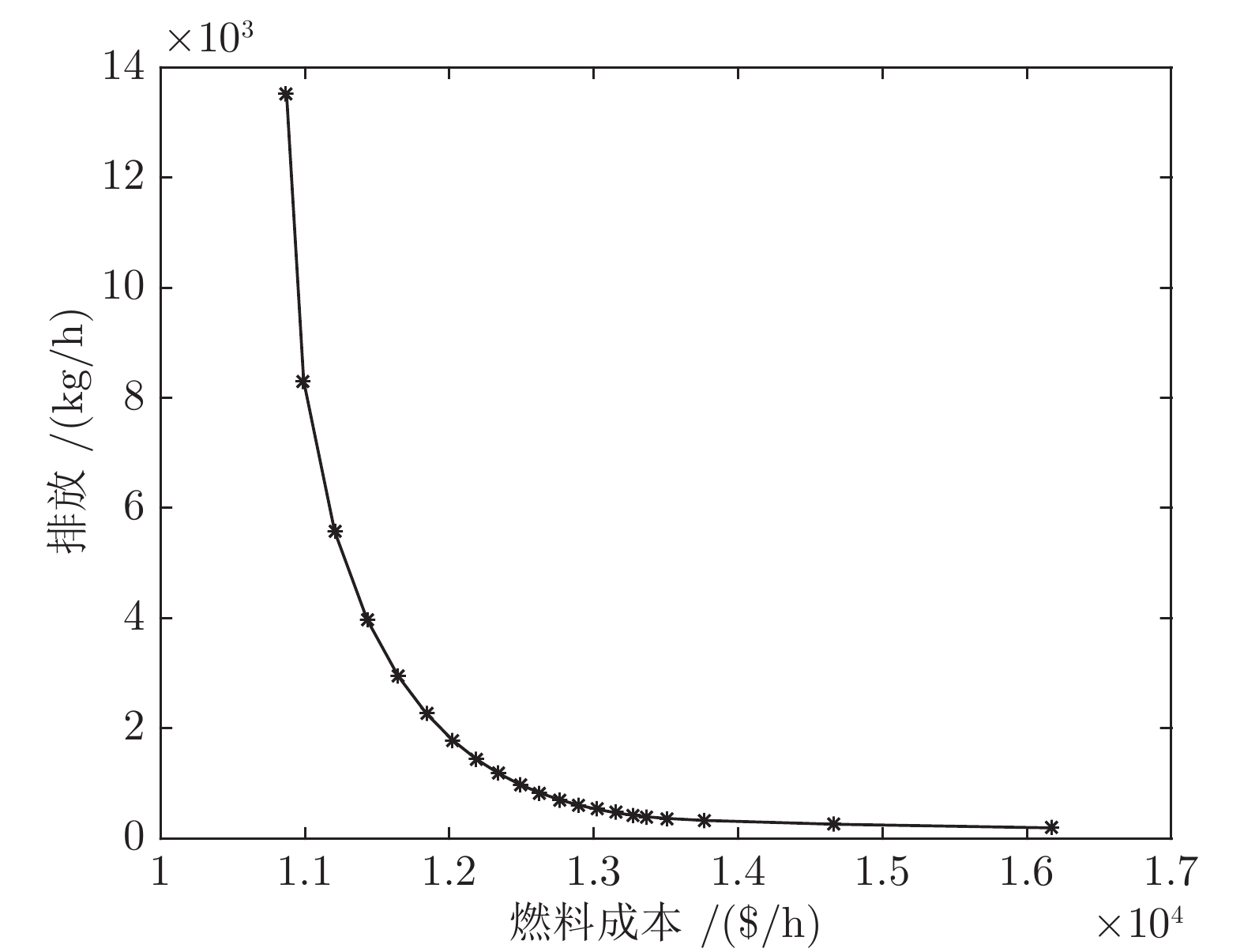
图 6 综合能源系统多目标优化调度问题的帕累托前沿
Fig. 6 The Pareto front of multi-objective optimized scheduling in the integrated energy systems
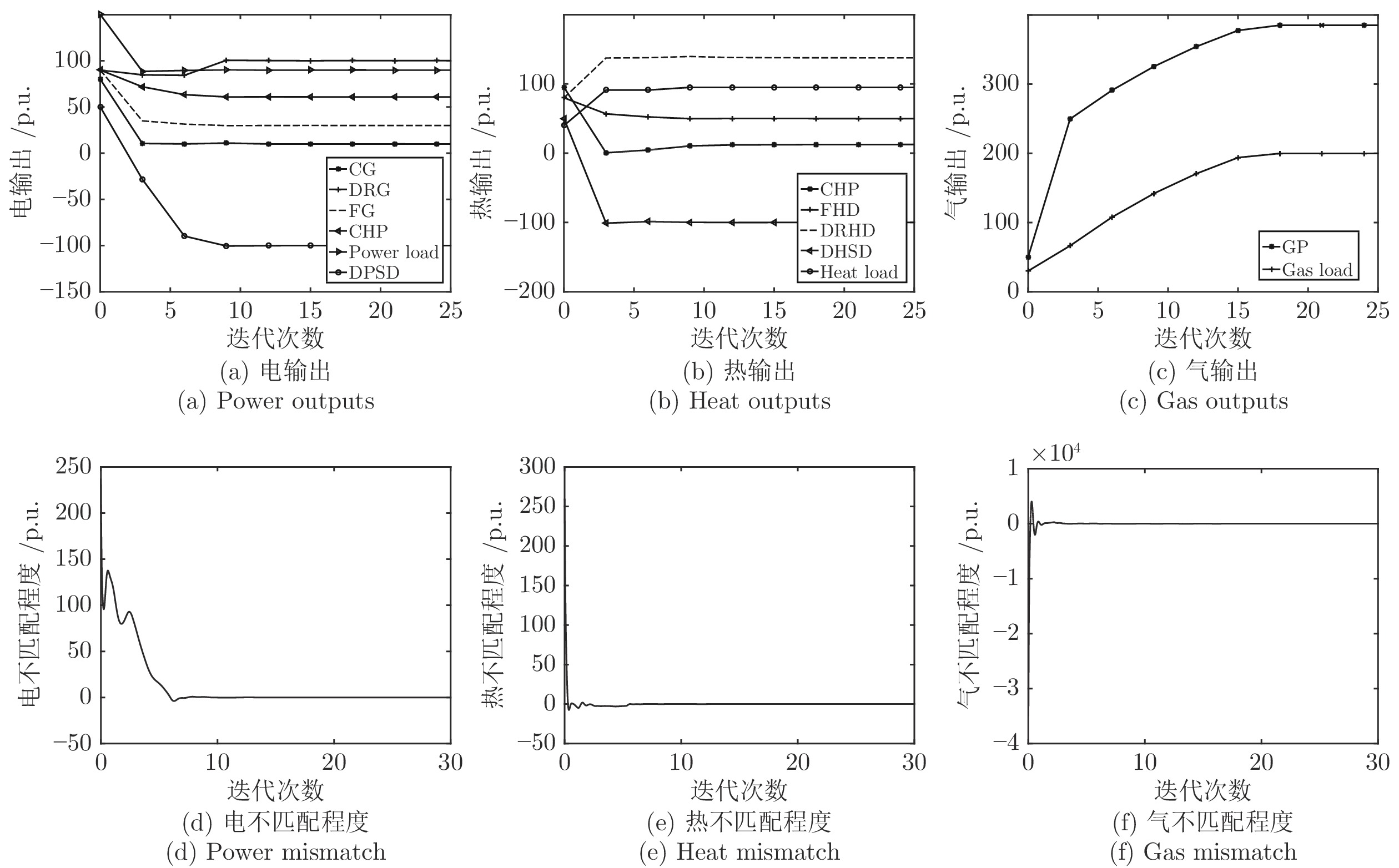
图 7 常规负荷下综合能源系统各元件的最优出力
Fig. 7 Optimal outputs of components the integrated energy systems under conventional load
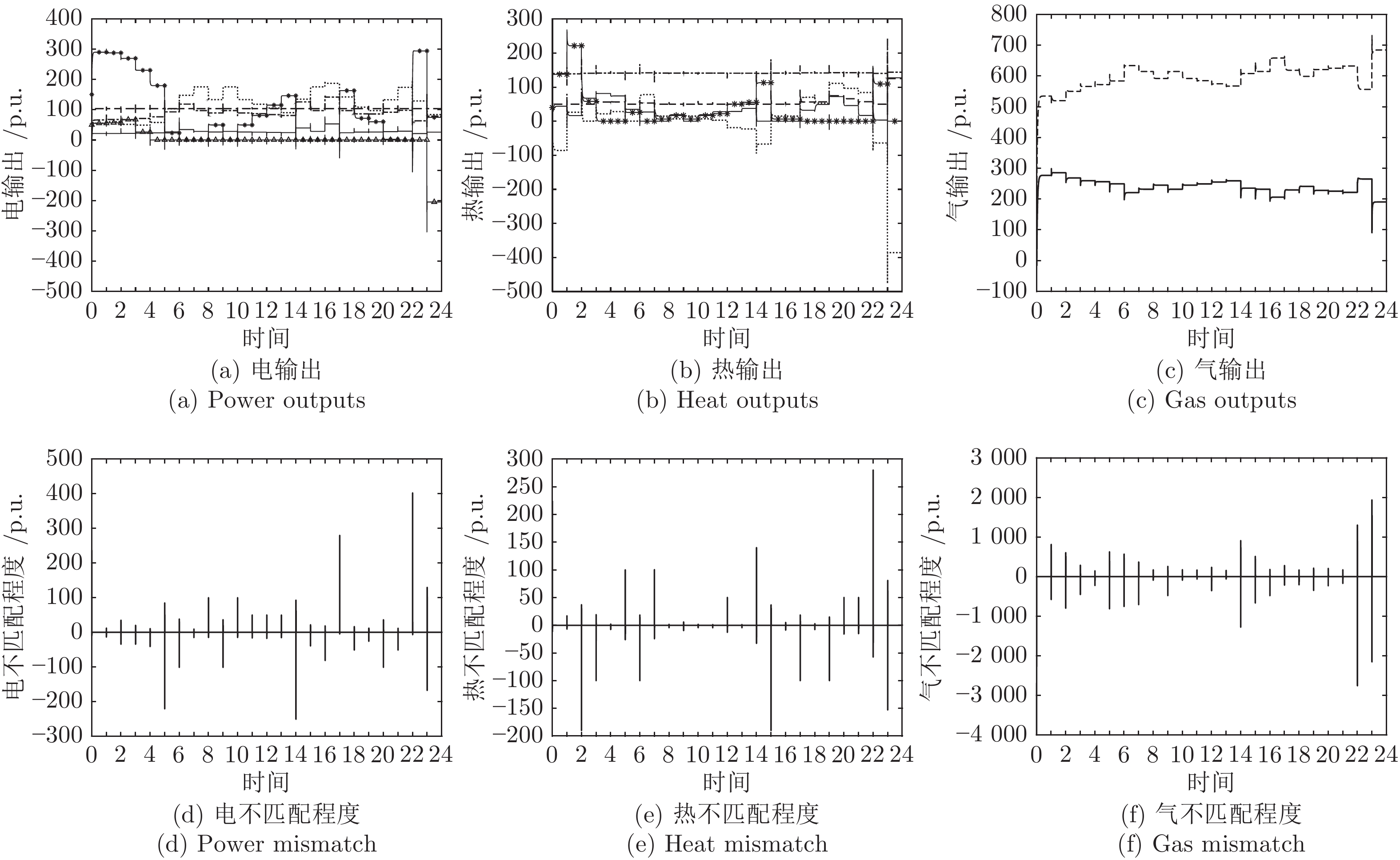
图 8 24小时负荷下综合能源系统各元件的最优出力
Fig. 8 Optimal outputs of components the integrated energy systems under 24 hour load
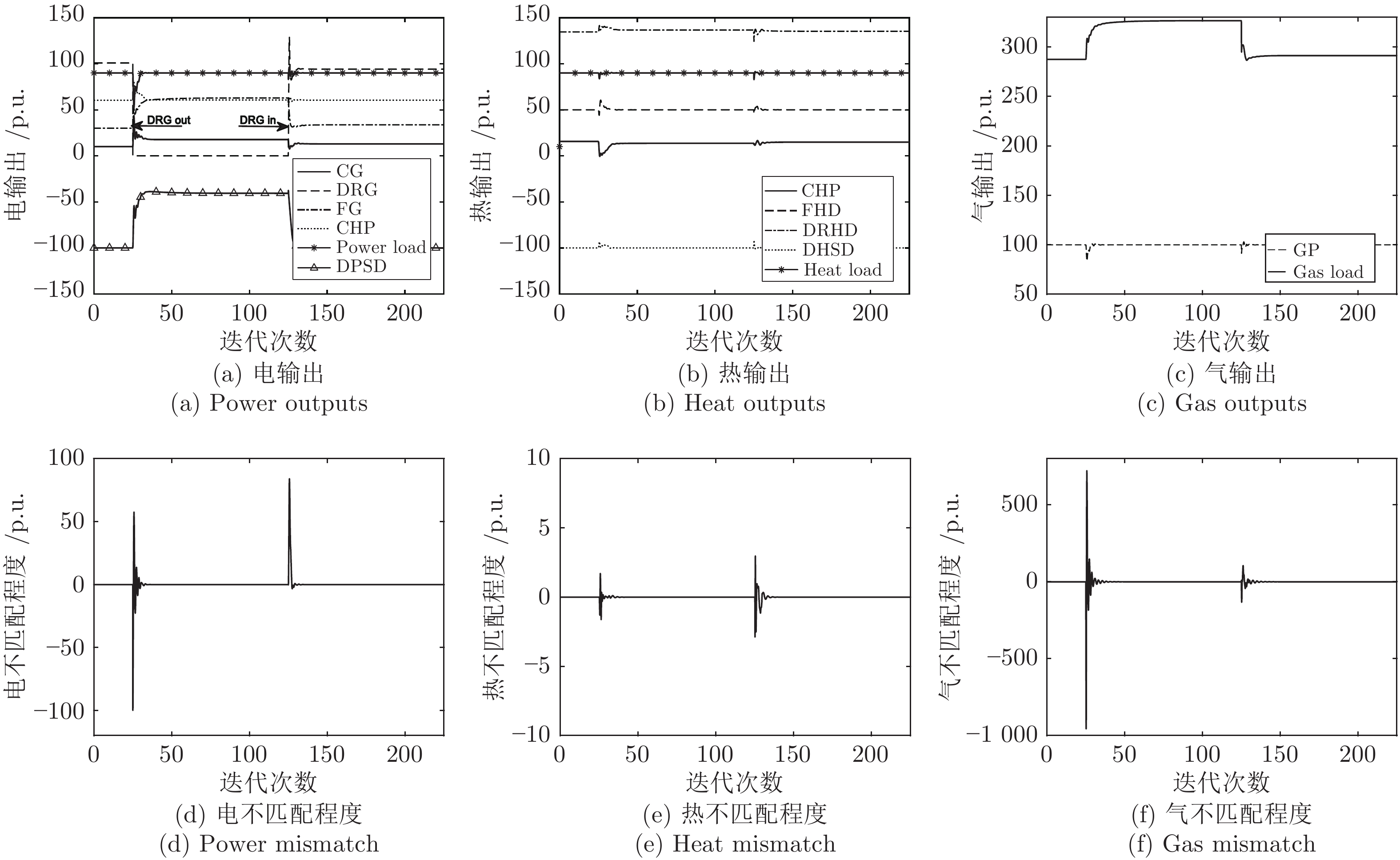
图 9 即插即用下综合能源系统各元件的最优出力
Fig. 9 Optimal outputs of components the integrated energy systems under the plug and play property
C1 各设备运行成本函数参数及出力上下限参数
C1 The operation cost function parameters and output limit parameters of equipment
设备名称 参数名称及参数值 CG ${\alpha _i}$ ${\beta _i}$ ${\gamma _i}$ $P_{{\rm{CGi}}}^{\min }$ $P_{{\rm{CGi}}}^{\max }$ $P_{{\rm{CGi}}}^{{\rm{ramp}}}$ 0.1 3 25 10 200 45 DRG ${b_i}$ ${\varepsilon _i}$ ${\gamma _i}$ $P_{{\rm{DRGi}}}^{\min }$ $P_{{\rm{DRGi}}}^{\max }$ 0.11 300 −1.1 84.3 103.5 DRHD ${b_i}$ ${\varepsilon _i}$ ${\gamma _i}$ $H_{{\rm{DRHDi}}}^{\min }$ $H_{{\rm{DRHDi}}}^{\max }$ 0.12 534 −1.3 133.2 148.2 FG ${a_i}$ ${b_i}$ ${c_i}$ ${\varepsilon _i}$ ${\eta _i}$ $P_{{\rm{FGi}}}^{\min }$ $P_{{\rm{FGi}}}^{\min }$ $P_{ {\rm{FGi} } }^{{\rm{ramp}}}$ 0.04 5 99 5 0.01 30 150 45 FHD ${a_i}$ ${b_i}$ ${c_i}$ ${\varepsilon _i}$ ${\eta _i}$ $H_{{\rm{FHDi}}}^{\min }$ $H_{{\rm{FHDi}}}^{\max }$ 0.027 5 60 5 0.008 50 150 CHP ${a_i}$ ${b_i}$ ${\alpha _i}$ ${\beta _i}$ ${\sigma _i}$ ${c_i}$ $P_{ {\rm{CHPi} } }^{{\rm{ramp}}}$ 0.0345 14.5 0.03 4.2 0.031 230 45 DPSD ${a_i}$ ${b_i}$ $P_{{\rm{sti}}}^{ds,\max }$ $P_{{\rm{sti}}}^{ch,\max }$ $S_{{\rm{sti}}}^{\min }$ $S_{{\rm{sti}}}^{\max }$ $S_{{\rm{sti}}}^{\rm{0}}$ 0.028 535 220 220 35 350 240 DHSD ${a_i}$ ${b_i}$ $P_{{\rm{sti}}}^{ds,\max }$ $P_{{\rm{sti}}}^{ch,\max }$ $S_{{\rm{sti}}}^{\min }$ $S_{{\rm{sti}}}^{\max }$ $S_{{\rm{sti}}}^{\rm{0}}$ 0.013 961 400 400 62 620 560 GP ${a_i}$ ${b_i}$ ${c_i}$ ${d_i}$ $g_{_{{\rm{GPi}}}}^{\min }$ $g_{_{{\rm{GPi}}}}^{\max }$ $2\times{10}^{-6}$ 0.006 50 4 100 1500 EL $a_i^p$ $b_i^p$ $a_i^h$ $b_i^h$ $a_i^g$ $b_i^g$ $P_{{\rm{fli}}}^{\max }$ $H_{{\rm{fli}}}^{\max }$ $g_{{\rm{fli}}}^{\max }$ 0.016 42.5 0.01 25.5 0.0167 22 1000 800 500  下载: 导出CSV
下载: 导出CSV
C2 各设备环境成本参数
C2 The environmental cost function parameters of equipment
设备名称 参数名称及参数值 CG ${\omega _i}$ ${\mu _i}$ ${\kappa _i}$ ${\zeta _i}$ ${\pi _i}$ ${\tau _i}$ 0.0409 −2.7 0.649 2 0.02857 0.64 FG ${\omega _i}$ ${\mu _i}$ ${\kappa _i}$ ${\zeta _i}$ ${\pi _i}$ ${\tau _i}$ 0.0254 −3.025 0.05638 5 0.0333 0.52 CHP ${\omega _i}$ ${\mu _i}$ ${\tau _i}$ $ 1.5{10}^{-6} $ $ 1.5{10}^{-5} $ 0.2 FHD ${\omega _i}$ ${\mu _i}$ ${\tau _i}$ $ 8{10}^{-6} $ $ 1{10}^{-5} $ 0.8 GP ${\omega _i}$ ${\mu _i}$ ${\tau _i}$ $ 8{10}^{-6} $ $ 1{10}^{-5} $ 0.6
下载: 导出CSV
C3 电力网络传输线路参数 (MW)
C3 The parameters of power network transmission pipelines (MW)
线路 $P_e^{\min }$ $P_e^{\max }$ 线路 $P_e^{\min }$ $P_e^{\max }$ 1 ~ 13 0 200 4 ~ 13 0 200 2 ~ 13 0 200 5 ~ 13 0 200 3 ~ 13 0 200 6 ~ 13 0 200
下载: 导出CSV
C4 热力网络传输管道参数 (MW)
C4 parameters of heating network transmission pipelines (MW)
管道 ${l_g}$ $m_g^{\min }$ $m_g^{\max }$ ${R_h}$ 节点 $t_{s,f}^{\min }$ $t_{s,f}^{\min }$ 4 ~ 14 2.8 0 2700 20 4 80 100 7 ~ 14 2.5 0 2700 20 7 80 100 8 ~ 14 3.0 0 2700 20 8 80 100
下载: 导出CSV
C5 气网网络传输管道参数 (MW)
C5 The parameters of gas network transmission pipelines (MW)
管道 ${C_{ij}}$ 节点 $\pi _i^{\min }$ $\pi _i^{\max }$ 节点 $\pi _i^{\min }$ $\pi _i^{\max }$ 11 ~ 3 10 3 1000 4000 12 1000 4000 11 ~ 4 10 4 1000 4000 11 ~ 7 10 7 1000 4000 11 ~ 12 10 12 1000 4000
下载: 导出CSV
C6 各设备在不同运行方式下的功率 (MW)
C6 Power of each device under different operating modes (MW)
CG DRG DRHD FG FHD CHP DPSD DHSD GP PL HL GL 以电定热 10 100 135 30 50 60.5/14.7 −100 −100 375.5 90 95 190 本文 12.6 103.5 133.2 30 50 55/44 −100 −100 405.9 90 95 190
下载: 导出CSV
-
[1] 唐昊, 刘畅, 杨明, 汤必强, 许丹, 吕凯. 考虑电网调峰需求的工业园区主动配电系统调度学习优化. 自动化学报, 2019, 45(x): 1−15Tang Hao, Liu Chang, Yang Ming, Tang Bi-Qiang, Xu Dan, Lv Kai. Learning-based optimization of active distribution system dispatch in industrial park considering the peak operation demand of power grid. Acta Automatica Sinica, 2019, 45(x): 1−15 [2] 姜兆宇, 贾庆山, 管晓宏. 多时空尺度的风力发电预测方法综述. 自动化学报, 2019, 45(1): 51-71Jiang Zhao-Yu, Jia Qing-Shan, Guan Xiao-Hong. A review of multi-temporal-and-spatial-scale wind power forecasting method. Acta Automatica Sinica, 2019, 45(1): 51-71 [3] 刘建刚, 杨胜杰. 具有容性负载的直流微电网系统分布式协同控制. 自动化学报, 2020, 46(6): 1283−1290Liu Jian-Gang, Yang Sheng-Jie. Distributed cooperative control of DC micro-grid systems with capacitive loads. Acta Automatica Sinica, 2020, 46(6): 1283−1290 [4] Dey B, Roy S K, Bhattacharyya B, et al. Solving multi-objective economic emission dispatch of a renewable integrated microgrid using latest bio-inspired algorithms. Engineering Science and Technology, an International Journal, 2019, 22(1): 55-66 doi: 10.1016/j.jestch.2018.10.001 [5] Qiu H, Gu W, Xu Y, et al. Tri-level mixed-integer optimization for two-stage microgrid dispatch with multi-uncertainties. IEEE Transactions on Power Systems, 2020, PP(99): 1-1 [6] Chen C, Lee T, Jan R, et al. A novel direct search approach for combined heat and power dispatch. International Journal of Electrical Power & Energy Systems, 2012, 43(1): 766-773 [7] Bahrami S, Sheikhi A. From demand response in smart grid toward integrated demand response in smart energy hub. IEEE Transactions on Smart Grid, 2016, 7(2): 650-658 [8] Alkano D, Scherpen J M, Chorfi Y, et al. Asynchronous distributed control of biogas supply and multi-energy demand. IEEE Transactions on Automation Science and Engineering, 2017, 14(2): 558-572 doi: 10.1109/TASE.2017.2648789 [9] Li Y, Zhang H, Liang X, et al. Event-triggered-based distributed cooperative energy management for multi-energy systems. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2008-2022 doi: 10.1109/TII.2018.2862436 [10] Yi Z, Xu Y, Hu J, et al. Distributed neurodynamic-based approach for economic dispatch in an integrated energy system. IEEE Transactions on Industrial Informatics, 2020, 16(4): 2245-2257 doi: 10.1109/TII.2019.2905156 [11] Lou Y, Wang S. Approximate representation of the pareto frontier in multiparty negotiations: decentralized methods and privacy preservation. European Journal of Operational Research, 2016, 254(3): 968-976 doi: 10.1016/j.ejor.2016.04.060 [12] Dandurand B, Wiecek M M. Distributed computation of pareto sets. Siam Journal on Optimization, 2015, 25(2): 1083-1109 doi: 10.1137/130929564 [13] Chen J, Sayed A H. Distributed pareto optimization via diffusion strategies. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(2): 205-220 doi: 10.1109/JSTSP.2013.2246763 [14] Yang S, Liu Q, Wang J, et al. A collaborative neurodynamic approach to multiple-objective distributed optimization. IEEE Transactions on Neural Networks, 2018, 29(4): 981-992 doi: 10.1109/TNNLS.2017.2652478 [15] Le X, Chen S, Yan Z, et al. A neurodynamic approach to distributed optimization with globally coupled constraints. IEEE Transactions on Cybernetics, 2017, 48(11): 3149-3158 [16] Zhang H, Li Y, Gao D, et al. Distributed optimal energy management for energy internet. IEEE Transactions on Industrial Informatics, 2017, 13(6): 3081-3097 doi: 10.1109/TII.2017.2714199 [17] Zhao C, He J, Cheng P, et al. Consensus-based energy management in smart grid with transmission losses and directed communication. IEEE Transactions on Smart Grid, 2016, 8(5): 2049-2061 [18] Goncalves E, Balbo A R, Silva D N, et al. Deterministic approach for solving multi-objective non-smooth environmental and economic dispatch problem. International Journal of Electrical Power & Energy Systems, 2018, 104(JAN.): 880-897. [19] 顾伟, 陆帅, 王珺, 等. 多区域综合能源系统热网建模及系统运行优化. 中国电机工程学报, 2017, 37(5): 1305-1315Gu Wei, Lu Shuai, Wang Jun, et al. Modeling of the heating network for multi-district integrated energy system and its operation optimization. Proceedings of the CSEE, 2017, 37(5): 1305-1315 [20] Correaposada C M, Sanchezmartin P. Integrated power and natural gas model for energy adequacy in short-term operation. IEEE Transactions on Power Systems, 2015, 30(6): 3347-3355 doi: 10.1109/TPWRS.2014.2372013 [21] Xu T, Wu W, Zheng W, et al. Fully distributed quasi-newton multi-area dynamic economic dispatch method for active distribution networks. IEEE Transactions on Power Systems, 2018, 33(4): 4253-4263 doi: 10.1109/TPWRS.2017.2771950 [22] Ruizcanales P, Rufianlizana A. A characterization of weakly efficient points. Mathematical Programming, 1995, 68(2): 205-212 [23] Mardle S, Miettinen K M. Nonlinear multi-objective optimization. Journal of the Operational Research Society, 1999, 51(2): 246 [24] Attouch H, Garrigos G, Goudou X, et al. A dynamic gradient approach to pareto optimization with nonsmooth convex objective functions. Journal of Mathematical Analysis and Applications, 2015, 422(1): 741-771 doi: 10.1016/j.jmaa.2014.09.001 [25] Liu Q, Yang S, Wang J. A collective neurodynamic approach to distributed constrained optimization. IEEE Transactions on Neural Networks and Learning Systems, 2016, 28(8): 1747-1758 [26] Liu Q, Wang J. A one-layer projection neural network for nonsmooth optimization subject to linear equalities and bound constraints. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(5): 812-824 doi: 10.1109/TNNLS.2013.2244908 -

 下载:
下载:



计量
- 文章访问数: 2900
- HTML全文浏览量: 1508
- PDF下载量: 497
- 被引次数: 0
