

Design of Team Formation Simulation System for Unmanned Ground Vehicles Based on USARSim and ROS
-
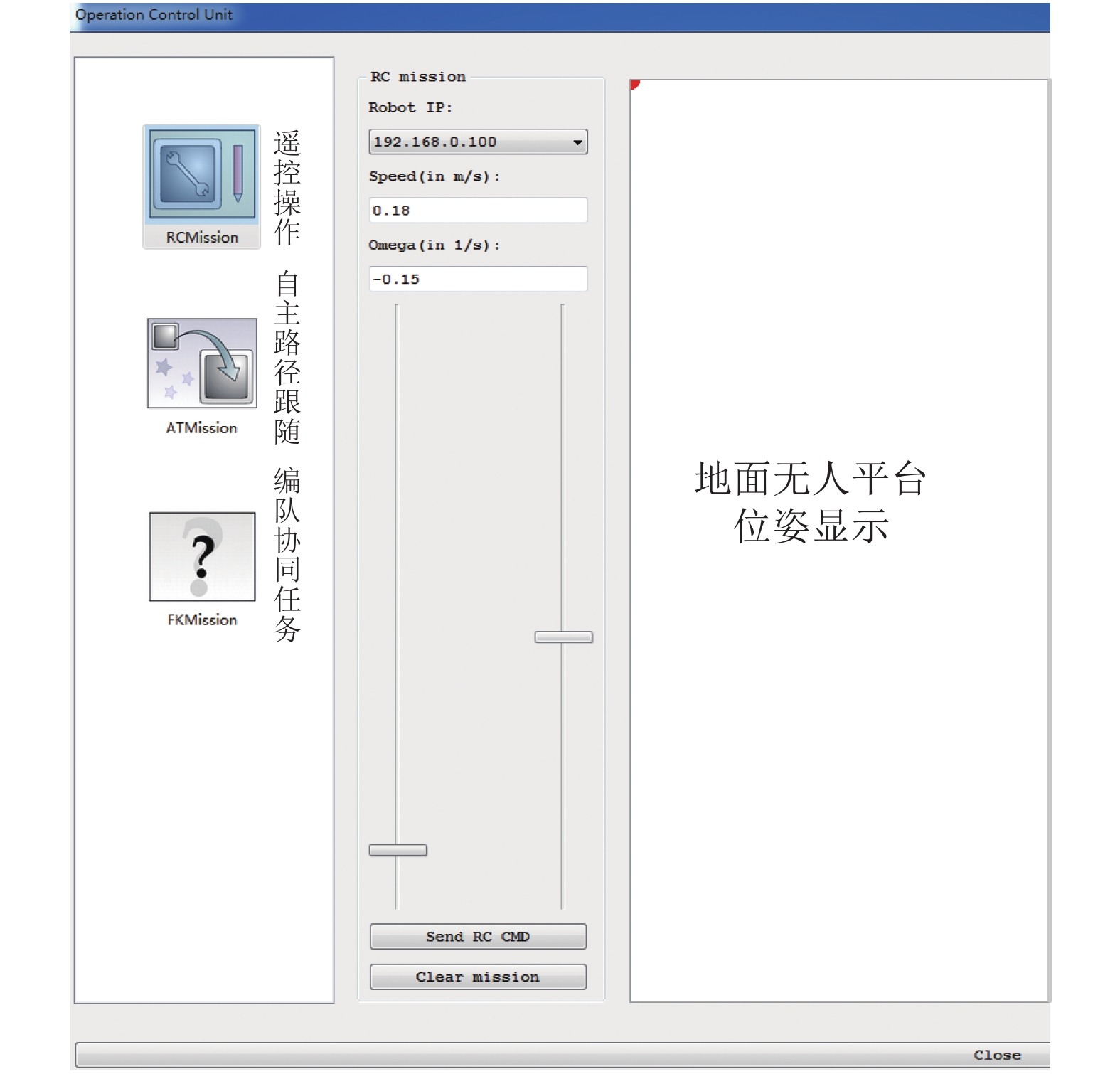
摘要: 针对越野非结构化环境下的地面无人平台(Unmanned ground vehicle, UGV)编队仿真系统存在功能模块不完善及算法集成测试困难等问题, 为便于有效测试地面无人平台编队协同控制方法性能及其适用的任务场景, 降低编队协同系统的开发成本, 本文提出了一种基于USARSim (Unified System for Automation and Robotics Simulator)和ROS (Robot Operating System)的地面无人平台编队协同仿真系统. 该仿真系统由人机交互界面、基于ROS架构的地面无人平台控制系统和基于USARSim的虚拟仿真场景三个部分组成, 其测试对象为地面无人平台编队协同控制算法. 通过充分利用ROS中集成的开源导航算法和USARSim中丰富的机器人及环境模型, 该系统为研究地面无人平台编队协同控制算法提供了新的思路和快速验证工具. 以领航者−跟随者编队控制方法为例进行该仿真系统的性能测试, 实验结果表明, 该仿真系统能够在外界条件一致的情况下完成对编队协同控制方法的性能测试, 系统稳定可靠.Abstract: Aiming at the problems of imperfect modules and difficult integration of UGV formation control system in off-road unstructured environment, a formation collaborative simulation system is proposed for testing the formation control method of UGV or its applicable mission scenarios, which is based on USARSim (Unified System for Automation and Robotics Simulator) and ROS (Robot Operating System). In this way, the cost for developing formation collaborative system should be reduced. The simulation system is composed of human-machine interaction, UGV control system based on ROS and virtual simulation scenarios based on USARSim. The test object is the formation cooperative control algorithm of UGV. The simulation system makes full use of the open-source navigation algorithm integrated in ROS and the rich robotic models and environment models in USARSim to provide new ideas and rapid verification tools for the research of formation control algorithms. Taking the leader-followers formation control method as an example to test the performance of the proposed simulation system, the experimental results show that the simulation system can test the performance of the formation cooperative control method under the same external conditions, and the system is stable and reliable.
-
Key words:
- UGV /
- team formation /
- USARSim /
- ROS /
- simulation system
-
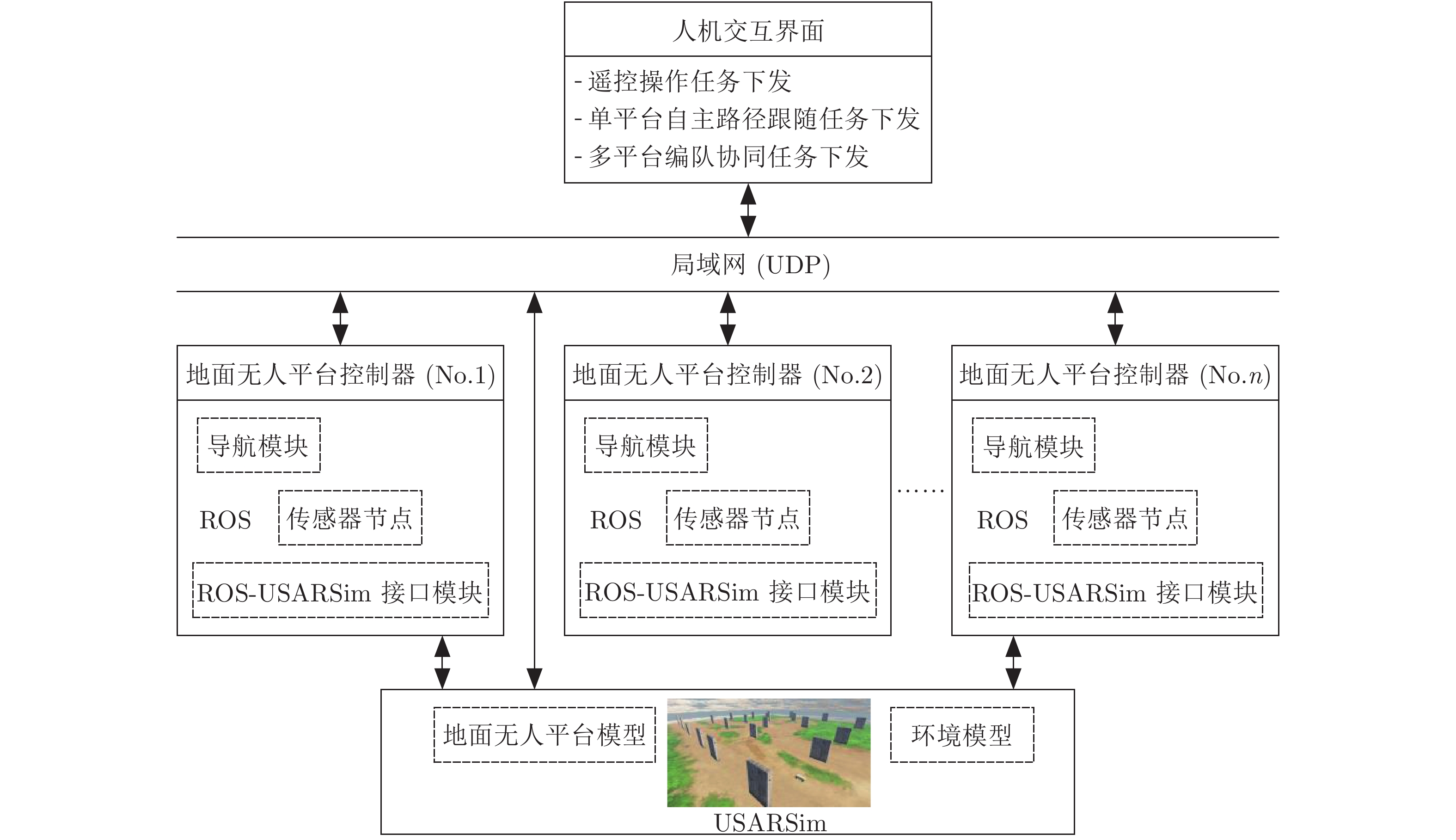
图 1 基于USARSim和ROS的地面无人平台编队协同仿真系统结构
Fig. 1 The architecture of formation simulation system for UGV based on USARSim and ROS

图 4 基于ROS架构的地面无人平台控制系统结构
Fig. 4 The architecture of control system for UGV based on ROS
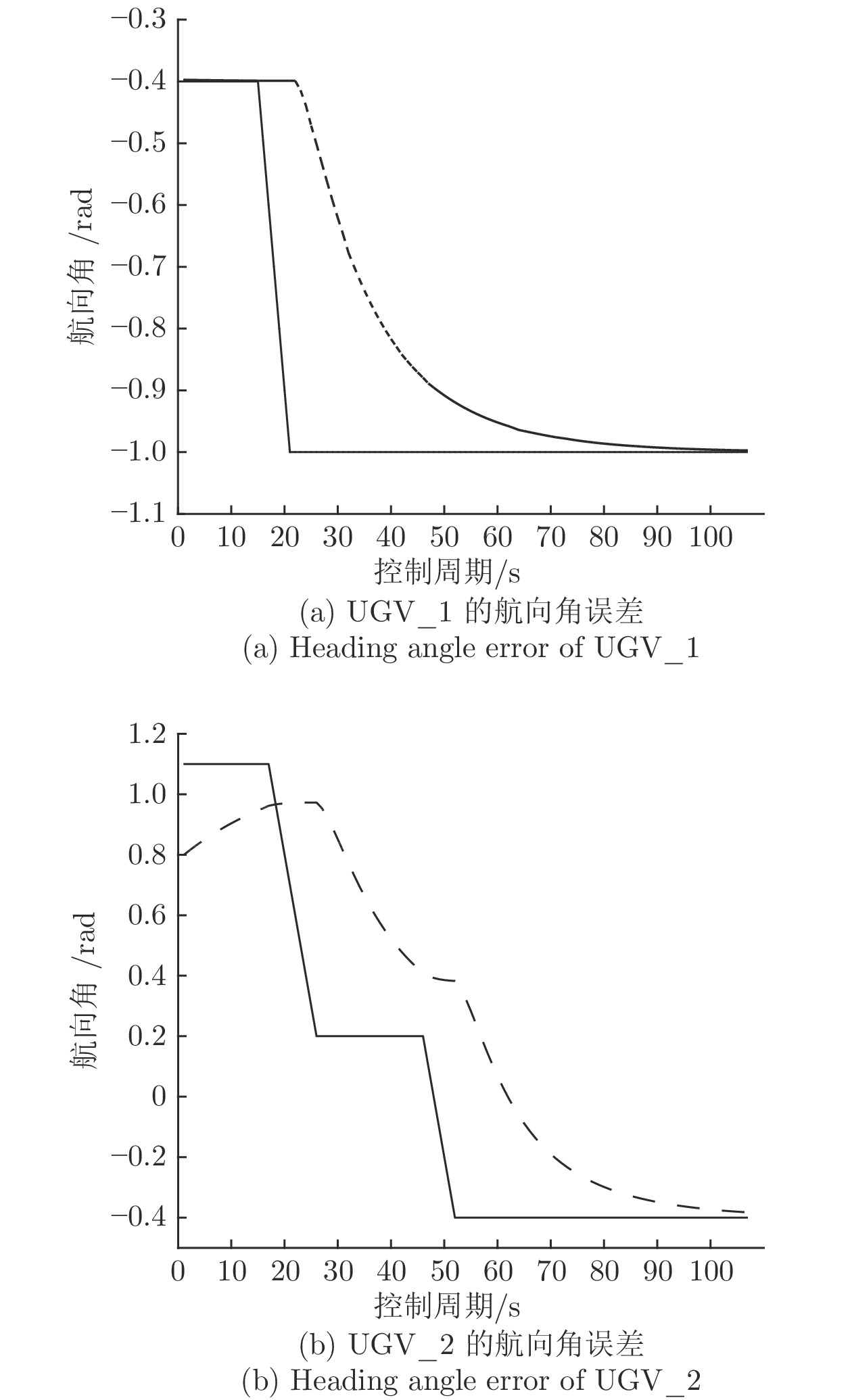
图 13 三角形编队任务中的跟随者航向角误差
Fig. 13 Heading angle error for followers during triangle formation control
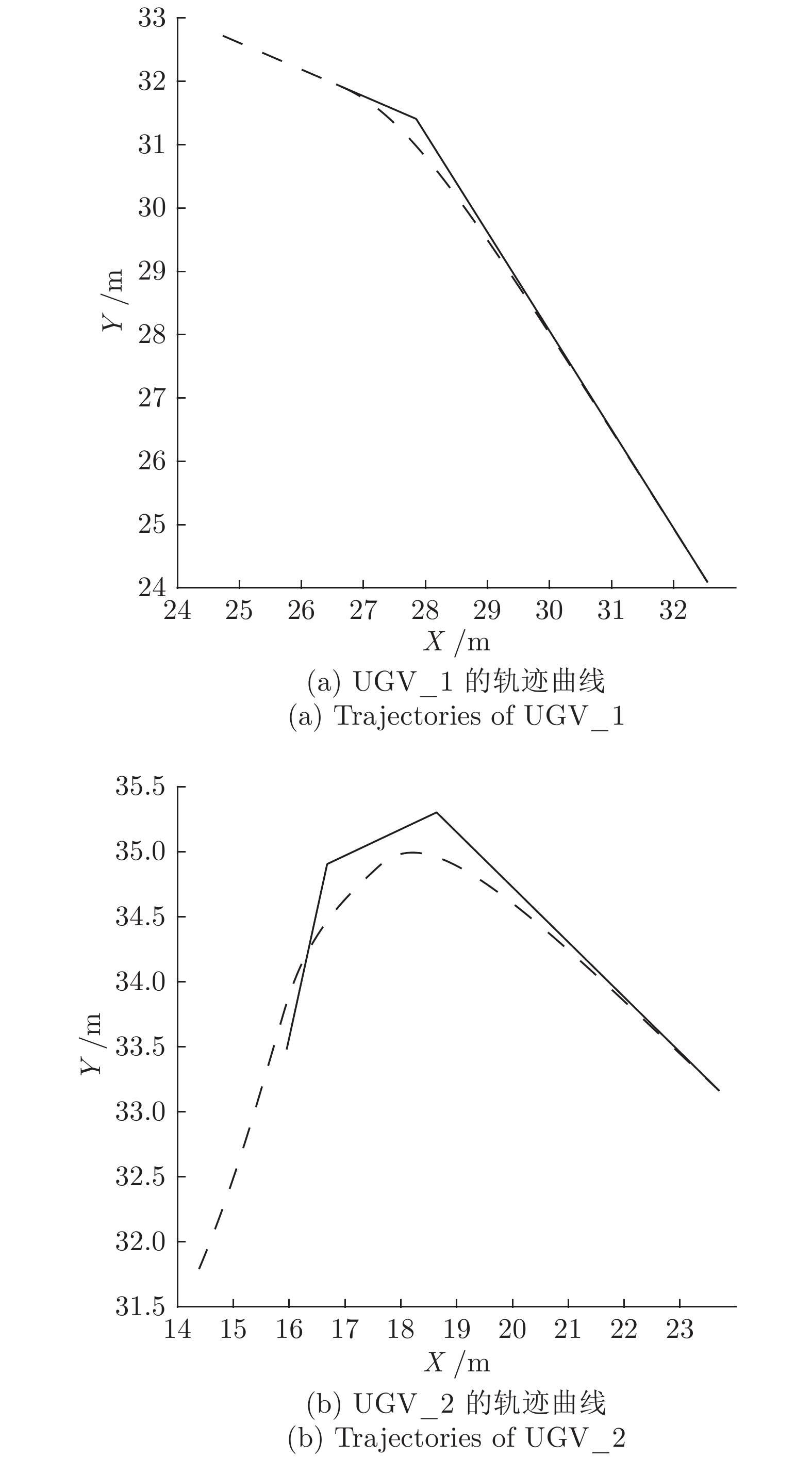
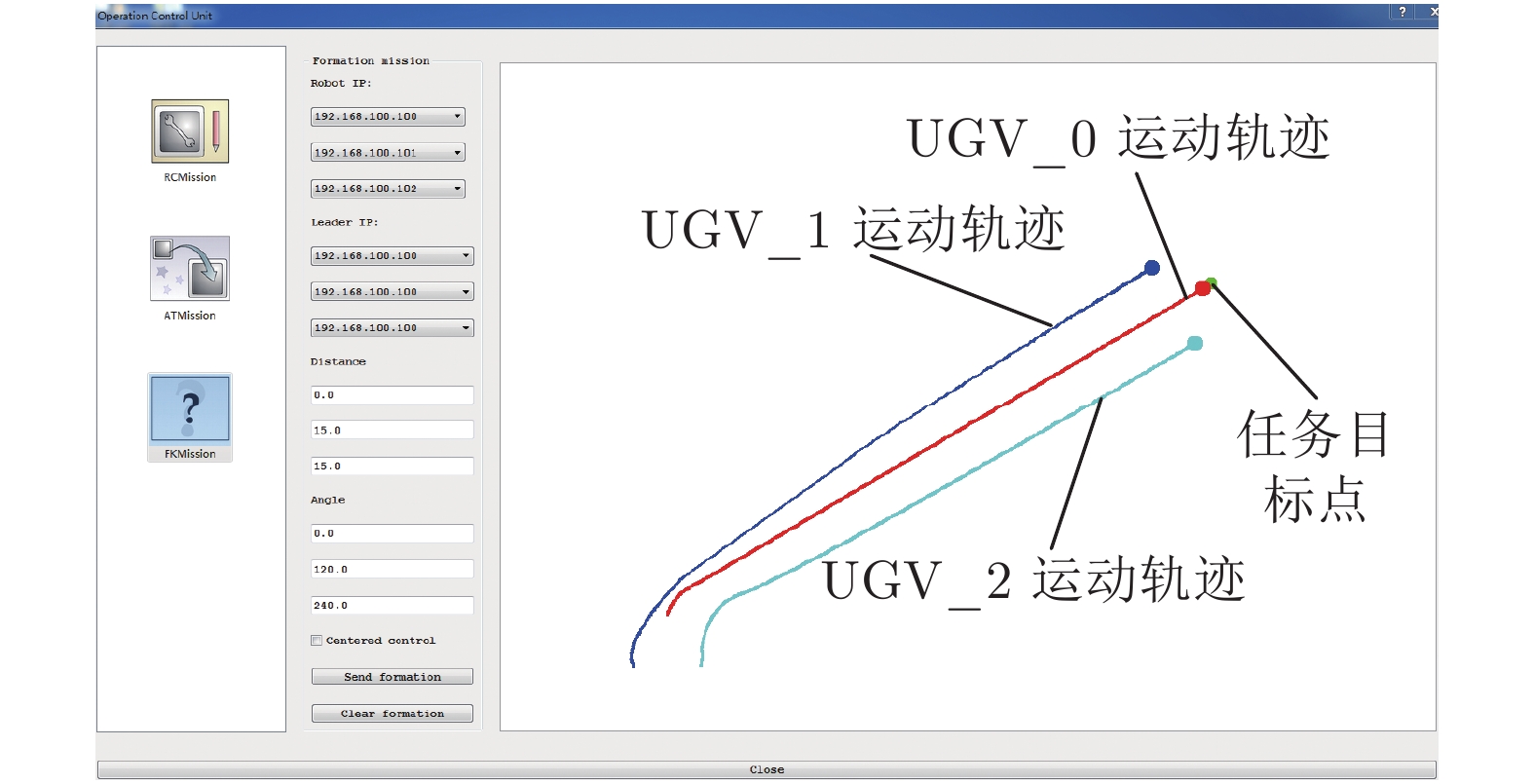
图 14 三角形编队任务中的跟随者轨迹曲线
Fig. 14 Trajectories for followers during triangle formation control
表 1 仿真测试硬件配置
Table 1 Hardware configuration in simulation
计算机编号 操作系统 IP地址 角色 1# Windows10 192.168.0.200 人机交互 2# Windows10 192.168.0.201 USARSim 3# ROS Melodic 192.168.0.100 领航者(UGV_0) 4# ROS Melodic 192.168.0.101 跟随者(UGV_1) 5# ROS Melodic 192.168.0.102 跟随者(UGV_2)  下载: 导出CSV
下载: 导出CSV
表 2 领航者−跟随者编队方法在不同仿真平台下的测试对比
Table 2 The comparison of leader-follower formation in different simulation systems
对比项 本文仿真系统 MATLAB LabVIEW UGV_1 位置$x$绝对误差 2.18 cm $\Delta x\to 0$ $\Delta x\to 0$ UGV_1 位置$y$绝对误差 3.14 cm $\Delta y\to 0$ $\Delta y\to 0$ UGV_1 航向角相对误差 0.26 % $\Delta \theta\to 0$ $\Delta \theta\to 0$ UGV_2 位置$x$绝对误差 4.89 cm $\Delta x\to 0$ $\Delta x\to 0$ UGV_2 位置$y$绝对误差 3.38 cm $\Delta y\to 0$ $\Delta y\to 0$ UGV_2 航向角相对误差 0.43 % $\Delta \theta\to 0$ $\Delta \theta\to 0$ 场景逼真度 $\bullet\bullet\bullet$ $\bullet$ $\bullet\bullet$ 人机交互 $\bullet\bullet\bullet$ $\bullet$ $\bullet\bullet$ 可扩展性 (感知及导航) $\bullet\bullet\bullet$ $\bullet\bullet$ $\bullet$ 开发简易性 $\bullet\bullet\bullet$ $\bullet\bullet$ $\bullet$
下载: 导出CSV
-
[1] Daniel A K. Robotic and Autonomous Systems Strategy. US Army, 2018. 1−31 [2] Muangmin K, Wanichanon T. Formation keeping of unmanned ground vehicles. MATEC Web of Conferences, 2017, 95: 09006 doi: 10.1051/matecconf/20179509006 [3] 黄健飞, 马彦. 基于跟随领航者的车辆自适应编队控制. 吉林大学学报(信息科学版), 2019, 37(3): 253−259Huang Jian-Fei, Ma Yan. Adaptive formation control for vehicles based on leader-follower strategy. Journal of Jinlin University (Information Science Edition), 2019, 37(3): 253−259 [4] Sun Z, Li B, Cai W C, Liao X H, Song Y D. Virtual leader based robust adaptive formation control of multi-unmanned ground vehicles (UGVs). In: Proceedings of the 2007 American Control Conference. NewYork, USA: IEEE, 2007. 1876−1881 [5] 郑延斌, 席鹏雪, 王林林, 樊文鑫, 韩梦云. 基于人工势场法的多智能体编队避障方法. 计算机应用, 2018, 38(12): 3380−3384 doi: 10.11772/j.issn.1001-9081.2018051119Zheng Yan-Bin, Xi Peng-Xue, Wang Lin-Lin, Fan Wen-Xin, Han Meng-Yun. Obstacle avoidance method for multi-agent formation based on artificial potential field method. Journal of Computer Applications, 2018, 38(12): 3380−3384 doi: 10.11772/j.issn.1001-9081.2018051119 [6] 郭宏达, 李永乐, 娄静涛. 车辆无人编队控制系统技术与应用分析. 军事交通学院学报, 2018, 20(6): 23−28Guo Hong-Da, Li Yong-Le, Lou Jing-Tao. Technology for vehicular autonomous platoon control system and its application. Journal of Military Transportation University, 2018, 20(6): 23−28 [7] 卫恒, 吕强, 刘扬, 林辉灿, 梁冰. 基于状态切换的分布式多机器人编队控制. 兵工学报, 2019, 40(5): 1103−1112 doi: 10.3969/j.issn.1000-1093.2019.05.024Wei Heng, Lv Qiang, Liu Yang, Lin Hui-Can, Liang Bing. State switching-based distributed multi-robot formation control. Acta Armamentarii, 2019, 40(5): 1103−1112 doi: 10.3969/j.issn.1000-1093.2019.05.024 [8] Yang T, Meng Z Y, Dimarogonas D V, Johansson K H. Global consensus for discrete-time multi-agent systems with input saturation constraints. Automatica, 2014, 50(2): 499−506 doi: 10.1016/j.automatica.2013.11.008 [9] 李润梅, 张立威, 王剑. 基于时变间距和相对角度的无人车跟随控制方法研究. 自动化学报, 2018, 44(11): 2031−2040Li Run-Mei, Zhang Li-Wei, Wang Jian. A control method of unmanned car following under time-varying relative distance and angle. Acta Automatica Sinica, 2018, 44(11): 2031−2040 [10] Ren W. Consensus based formation control strategies for multi-vehicle systems. In: Proceedings of the 2006 American Control Conference. New York, USA: IEEE, 2006. 4237−4242 [11] Glavaski S, Chaves M, Day R, Nag P, Williams A, Zhang W. Vehicle networks: achieving regular formation. In: Proceedings of the 2003 American Control Conference. New York, USA: IEEE, 2003. 4095−4100 [12] 张瑞雷, 李胜, 陈庆伟, 杨春. 复杂地形环境下多机器人编队控制方法. 控制理论与应用, 2014, 31(4): 531−537 doi: 10.7641/CTA.2014.30924Zhang Rui-Lei, Li Sheng, Chen Qing-Wei, Yang Chun. Formation control for multi-robot system in complex terrain. Control Theory and Applications, 2014, 31(4): 531−537 doi: 10.7641/CTA.2014.30924 [13] Meng D Y, Jia Y M, Du J P, Zhang J. On iterative learning algorithms for the formation control of nonlinear multi-agent systems. Automatica, 2014, 50: 291−295 doi: 10.1016/j.automatica.2013.11.009 [14] 王晓森, 曹国华. 带有多未知性的无人车编队控制. 车辆与动力技术, 2019, 2: 43−47 doi: 10.3969/j.issn.1009-4687.2019.02.009Wang Xiao-Sen, Cao Guo-Hua. Formation control for unmanned vehicles with multiple unknowns. Vehicle and Power Technology, 2019, 2: 43−47 doi: 10.3969/j.issn.1009-4687.2019.02.009 [15] 田大新, 康璐. 基于鱼群效应的无人驾驶车辆编队算法研究. 无人系统技术, 2018, 1(4): 62−67Tian Da-Xin, Kang Lu. Research on algorithm of unmanned vehicle formation based on fish school. Unmanned Systems Technology, 2018, 1(4): 62−67 [16] Soni A, Hu H. Formation control for a fleet of autonomous ground vehicles: A survey. Robotics, 2018, 7(67): 1−25 [17] Krajzewicz D, Hertkorn G, Wagner P, Rossel C. SUMO(Simulation of Urban Mobility): An open-source traffic simulation. In: Proceedings of the 4th Middle East Symposium on Simulation and Modelling. NewYork, USA: IEEE, 2002. 183−187 [18] 高力, 陆丽萍, 褚端峰, 张勇, 吴超仲. 基于图与势场法的多车道编队控制. 自动化学报, 2020, 46(1): 117−126Gao Li, LU Li-Ping, Chu Duan-Feng, Zhang Yong, Wu Chao-Zhong. Multi-lane convoy control based on graph and potential field. Acta Automatica Sinica, 2020, 46(1): 117−126 [19] Dosovitskiy A, Ros G, Codevilla F, Lopez A, Koltun V. CARLA: An open urban driving simulator. In: Proceedings of the 1st Conference on Robot Learning. New York, USA: IEEE, 2017. 1−10 [20] Goodin C, George T R, Cummins C L, Durst P J, Gates B Q, Mckinley G B. The virtual autonomous navigation environment: High fidelity simulations of sensor, environment, and terramechanics for robotics. In: Proceedings of the 13th ASCE Aerospace Division Conference on Engineering, Science, Construction, and Operations in Challenging Environments. New York, USA: IEEE, 2012. 1441−1447 [21] Carpin S, Lewis M, Wang J J, Balakirsky S. USARSim: a robot simulator for research and education. In: Proceedings of the IEEE International Conference on Robotics and Automation. New York, USA: IEEE, 2007. 1400−1405 [22] Quigley M, Conley K, Gerkey B P, Faust J. ROS: an open-source robot operating system. In: Proceedings of the 2009 IEEE International Conference on Robotics and Automation Workshop on Open Source Software. New York, USA: IEEE, 2009. 1−6 [23] Akash U, Ananya N, Sandeep S, Raj D. Autonomous navigation with collision avoidance using ROS. Journal of Remote Sensing GIS & Technology, 2019, 5(2): 14−18 [24] Ceriani S, Migliavacca M. Middleware in Robotics, Internal Report for Advanced Methods of Information Technology for Autonomous Robotics, 2016 [25] 韩青, 孙树栋, 智睿瑞. 基于纯角度观测信息的leader-followers机器人编队控制方法. 西北工业大学学报, 2015, 33(2): 244−250 doi: 10.3969/j.issn.1000-2758.2015.02.013Han Qing, Sun Shu-Dong, Zhi Rui-Rui. Bearing-only leader-followers multi-robot formation control. Journal of Northwestern Polytechnical University, 2015, 33(2): 244−250 doi: 10.3969/j.issn.1000-2758.2015.02.013 [26] Das A K, Fierro R, Kumar V, Ostrowski J P, Spletzer J, Taylor C J. A vision-based formation control framework. IEEE Transaction on Robotics and Automation, 2002, 18(5): 813−825 doi: 10.1109/TRA.2002.803463 [27] Madhevan B, Sreekumar M. Tracking algorithm using leader follower approach for multi robots. Procedia Engineering, 2013, 64: 1426−1435 doi: 10.1016/j.proeng.2013.09.224 [28] Yu X, Liu L. Leader-follower formation of vehicles with velocity constraints and local coordinate frames. Science China Information Sciences, 2017, 60(7): 070206 doi: 10.1007/s11432-016-9094-1 -

 下载:
下载:




计量
- 文章访问数: 2409
- HTML全文浏览量: 1087
- PDF下载量: 380
- 被引次数: 0
