

Deep Neural Fuzzy System Algorithm and Its Regression Application
-
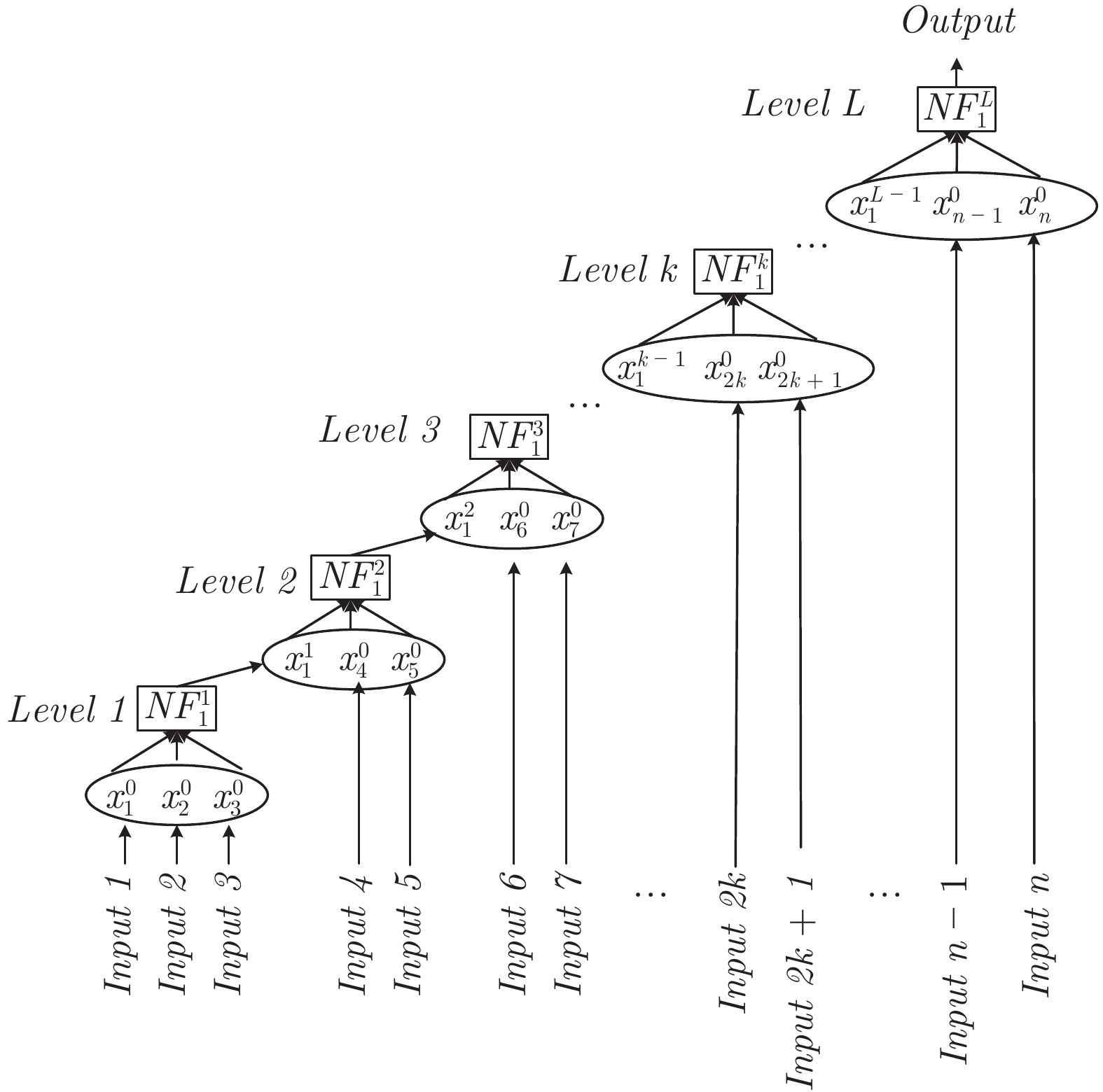
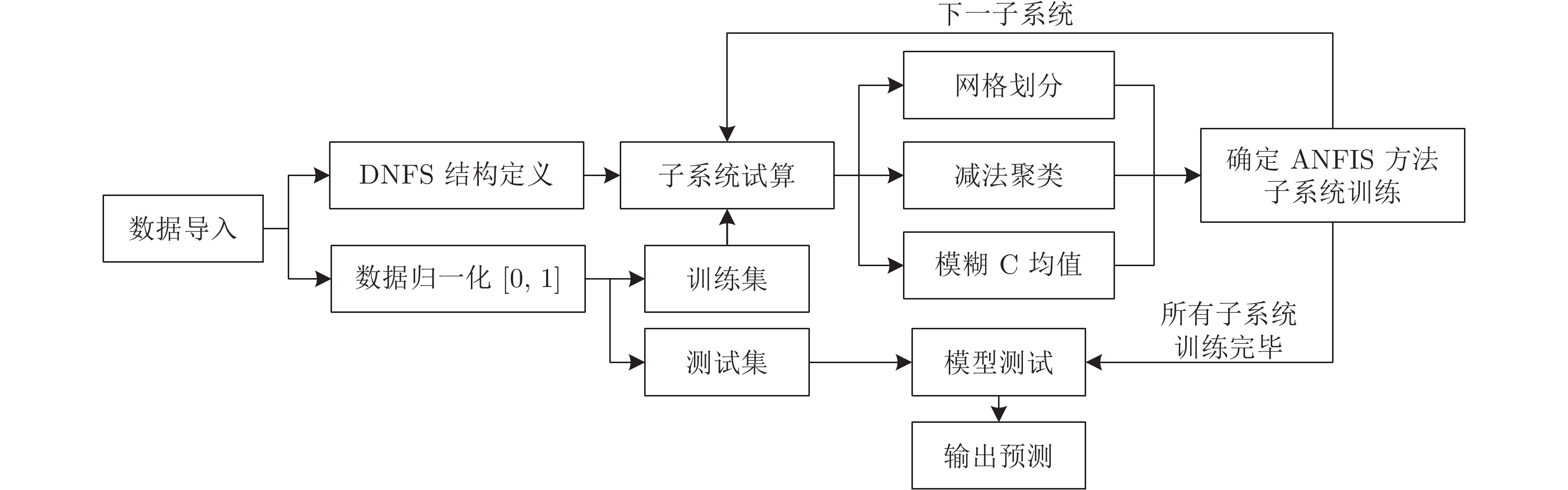
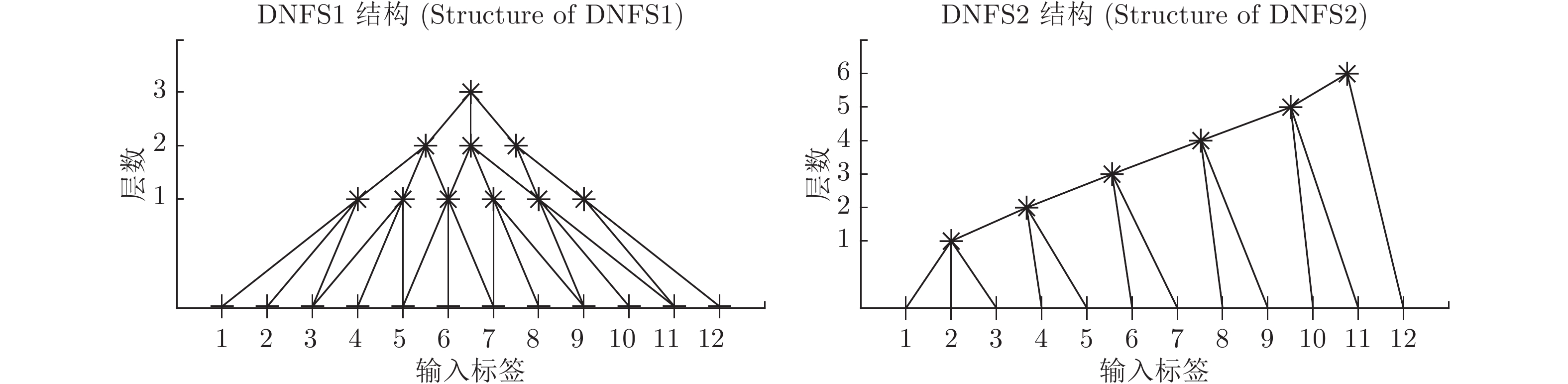
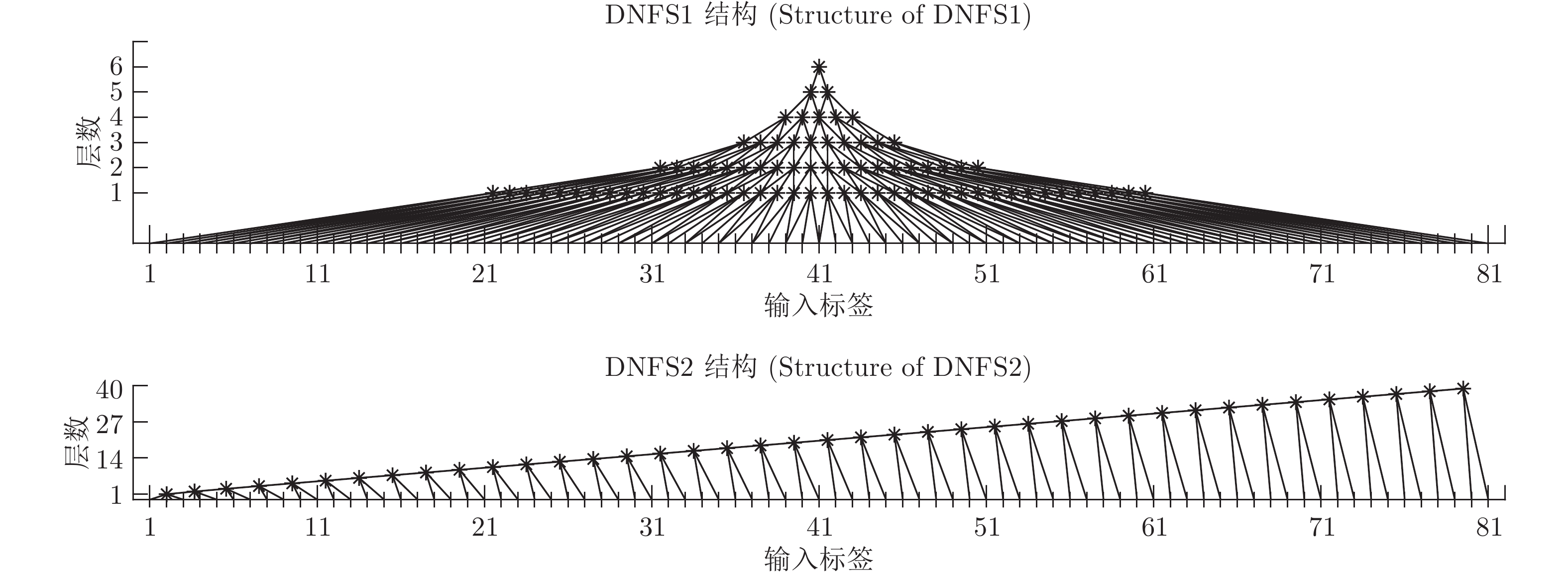
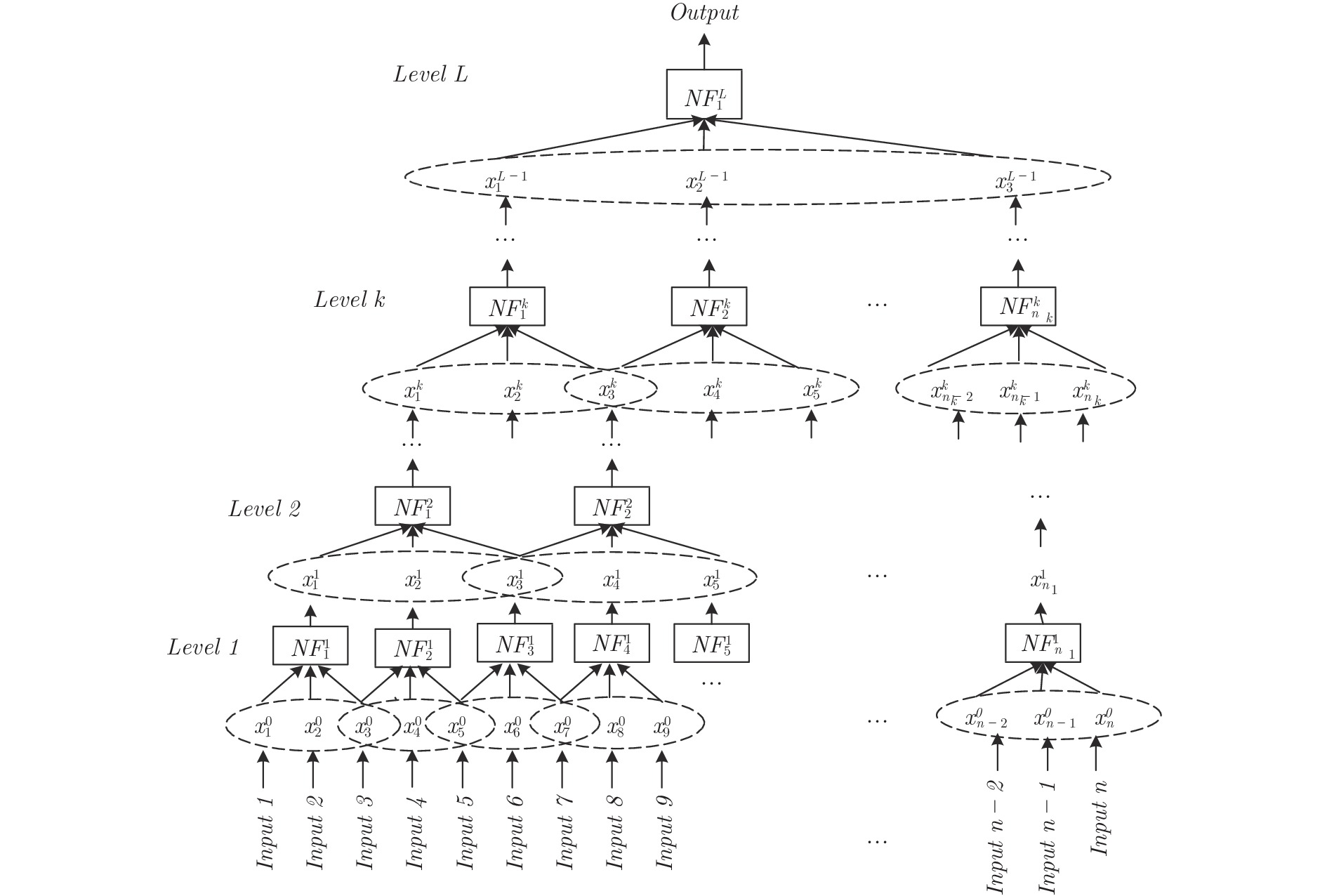
摘要: 深度神经网络是人工智能的热点, 可以很好处理高维大数据, 却有可解释性差的不足. 通过IF-THEN规则构建的模糊系统, 具有可解释性强的优点, 但在处理高维大数据时会遇到“维数灾难”问题. 本文提出一种基于ANFIS (Adaptive network based fuzzy inference system)的深度神经模糊系统(Deep neural fuzzy system, DNFS)及两种基于分块和分层的启发式实现算法: DNFS1和DNFS2. 通过四个面向回归应用的数据集的测试, 我们发现: 1)采用分块、分层学习的DNFS在准确度与可解释性上优于BP、RBF、GRNN等传统浅层神经网络算法, 也优于LSTM和DBN等深度神经网络算法; 2)在低维问题中, DNFS1具有一定优势; 3)在面对高维问题时, DNFS2表现更为突出. 本文的研究结果表明DNFS是一种新型深度学习方法, 不仅可解释性好, 而且能有效解决处理高维数据时模糊规则数目爆炸的问题, 具有很好的发展前景.Abstract: Deep neural network is a hot spot of artificial intelligence, which can deal with high-dimensional big data well, but has the disadvantage of poor interpretability. The fuzzy system constructed by if-then rules has the advantage of strong interpretability, but it will encounter the problem of “the curse of dimension” when dealing with high dimension big data. This paper presents a DNFS (Deep neural fuzzy system) based on ANFIS (Adaptive network based fuzzy inference system) and two heuristic algorithms based on block and layer: DNFS1 and DNFS2. Through the testing of four regression-oriented data sets, we found: 1) DNFS with block and layer learning is superior to BP, RBF, GRNN and other traditional shallow neural network algorithms in accuracy and interpretability, as well as LSTM, DBN and other deep neural network algorithms; 2) In low dimensional problems, DNFS1 has certain advantages; 3) In the face of high dimensional problems, DNFS2 is more prominent. The results of this paper show that DNFS is a new deep learning method, which not only has good interpretability, but also can effectively solve the problem that the number of fuzzy rules explodes when dealing with high-dimensional data, and has a good development prospect.
-
表 1 实验数据集
Table 1 Experimental data set
项目编号 数据集 输入维度 输出维度 样本数 DNFS1总层数 DNFS2总层数 1 Smartwatch_sens (SMW) 12 1 12000 15 30 2 Online News Popularity (ONP) 59 1 20000 25 145 3 Superconductivty (SUP) 81 1 10000 30 200 4 BlogFeedback (BF) 271 1 15000 40 675  下载: 导出CSV
下载: 导出CSV
表 2 SMW测试集评价指标
Table 2 Evaluation index of SMW test set
BP RBF GRNN LSTM DBN ANFIS DNFS1 DNFS2 STD 0.038869 0.038510 0.038441 0.039385 0.038596 0.039398 0.037643 0.040971 RMSE 0.038865 0.038506 0.038437 0.040219 0.038592 0.039397 0.037640 0.040970 MAE 0.017789 0.018355 0.017081 0.020928 0.017088 0.017965 0.016639 0.016834 SMAPE 3.5849 % 3.7368 % 3.4864 % 4.2653 % 3.4872 % 3.6510 % 3.3553 % 3.5535 % Score 16 16 27 7 21 11 32 14
下载: 导出CSV
表 3 ONP测试集评价指标
Table 3 Evaluation index of ONP test set
BP RBF GRNN LSTM DBN ANFIS DNFS1 DNFS2 STD 0.040148 0.017565 0.016941 0.016321 0.016217 0.234585 0.025012 0.016195 RMSE 0.040173 0.017567 0.016941 0.018827 0.016216 0.263966 0.025011 0.016195 MAE 0.005824 0.005347 0.004060 0.011639 0.004153 0.123609 0.004400 0.003975 SMAPE 83.1325 % 110.4412 % 77.8989 % 136.6059 % 88.0204 % 106.8444 % 78.3964 % 79.4094 % Score 12 15 26 13 24 6 18 30
下载: 导出CSV
表 4 SUP测试集评价指标
Table 4 Evaluation index of SUP test set
BP RBF GRNN LSTM DBN ANFIS DNFS1 DNFS2 STD 0.12385 0.13038 0.17493 0.15997 0.21074 0.16866 0.13415 0.12293 RMSE 0.12384 0.13038 0.17527 0.16004 0.21076 0.16972 0.13418 0.12293 MAE 0.08786 0.10038 0.14956 0.12958 0.18245 0.12657 0.10165 0.08735 SMAPE 30.1760 % 32.4668 % 43.0296 % 38.5752 % 51.2832 % 37.7120 % 31.2728 % 28.7900 % Score 28 23 8 14 4 14 21 32
下载: 导出CSV
表 5 BF测试集评价指标
Table 5 Evaluation index of BF test set
BP RBF GRNN LSTM DBN ANFIS DNFS1 DNFS2 STD 0.10900 0.04217 0.04322 0.03355 0.04457 0.09683 0.04465 0.03155 RMSE 0.10973 0.04259 0.04324 0.03398 0.04457 0.33922 0.04466 0.03156 MAE 0.02304 0.01112 0.01120 0.01409 0.01607 0.32630 0.01028 0.00859 SMAPE 54.675 % 76.842 % 81.804 % 96.684 % 102.462 % 142.341 % 64.263 % 54.162 % Score 12 23 19 21 13 5 19 32
下载: 导出CSV
-
[1] Mcclloch W S, Pitts W. A logical calculus of the ideas immanent in nervous activity. Bulletin of Mathematical Biology, 1943, 10(5): 115−133 [2] Rosenblatt, F. The perceptron: A probabilistic model for information storage and organization in the brain. Psychological Review, 1958, 65: 386−408 doi: 10.1037/h0042519 [3] Minsky M L, Papert S A. Perceptrons. American Journal of Psychology, 1969, 84(3): 449−452 [4] Hopfield J J. Neural networks and physical systems with emergent collective computational abilities. Proceedings of the National Academy of Sciences of the United States of America, 1982, 79(8): 2554−2558 doi: 10.1073/pnas.79.8.2554 [5] Lv Y S, Chen Y Y, Zhang X Q, Duan Y J, Li N Q. Social media based transportation research: The state of the work and the networking. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1): 19−26 doi: 10.1109/JAS.2017.7510316 [6] Rumelhart, David E, Hinton, Geoffrey E, Williams, Ronald J. Learning representations by back-propagating errors. Nature, 1986, 323(6088): 533−536 doi: 10.1038/323533a0 [7] Cortes C, Vapnik V. Support-vector networks. Machine Learning, 1995, 20(3): 273−297 [8] Hinton, G. E. Reducing the dimensionality of data with neural networks. Science, 2006, 313(5786): 504−507 doi: 10.1126/science.1127647 [9] Lecun Y, Bengio Y, Hinton G. Deep learning. Nature, 2015, 521(7553): 436−444 doi: 10.1038/nature14539 [10] Sabour S, Frosst N, Hinton G E. Dynamic routing between capsules. In: Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA. 2017. 1−11 [11] Guha A, Ghosh S, Roy A, Chatterjee S. Epileptic seizure recognition using deep neural network. Emerging Technology in Modelling and Graphics. Springer, Singapore, 2020. 21−28 [12] Kantz E D, Tiwari S, Watrous J D, Cheng S. Deep neural networks for classification of lc-ms spectral peaks. Analytical Chemistry, 2019, 91(19): 12407−12413. DOI: 10.1021/acs.analchem.9b02983 [13] Liu B S, Chen X M, Han Y H, Li J J, Xu H B, Li X W. Accelerating DNN-based 3D point cloud processing for mobile computing. Science China. Information Sciences, 2019, 32(11): 36−46 [14] Mercedes E. Paoletti. Deep pyramidal residual networks for spectral–spatial hyperspectral image classification. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(2): 740−754 doi: 10.1109/TGRS.2018.2860125 [15] Yang H, Luo L, Chueng L P, Ling D, Chin F. Deep learning and its applications to natural language processing. Deep Learning: Fundamentals, Theory and Applications. Springer, Cham, 2019. 89−109 [16] Zadeh, L.A. Fuzzy sets. Information & Control, 1965, 8(3): 338−353 [17] Mamdani E H, Baaklini N. Prescriptive method for deriving control policy in a fuzzy-logic controller. Electronics Letters, 1975, 11(25): 625−626 [18] Wang L X. Fuzzy systems are universal approximators. In: Proceedings of the 1992 IEEE International Conference on Fuzzy Systems. San Diego, CA, USA: IEEE, 1992.1163−1170 [19] Wang L X, Mendel J M. Generating fuzzy rules by learning from examples. IEEE Transactions on Systems, Man and Cybernetics, 1992, 22(6): 1414−1427 doi: 10.1109/21.199466 [20] Jang J S R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Transactions on Systems Man and Cybernetics, 1993, 23(3): 665−685 [21] Sun B X, Gao K, Jiang J C, Luo M, He T T, Zheng F D, Guo H Y. Research on discharge peak power prediction of battery based on ANFIS and subtraction clustering. Transactions of China Electrotechnical Society, 2015, 30(4): 272−280 [22] 陈伟宏, 安吉尧, 李仁发, 李万里. 深度学习认知计算综述. 自动化学报, 2017, 43(11): 1886−1897Chen Wei-Hong, An Ji-Yao, Li Ren-Fa, Li Wan-Li. Review on deep-learning-based cognitive computing. Acta Automatica Sinica, 2017, 43(11): 1886−1897 -

 下载:
下载:






计量
- 文章访问数: 2268
- HTML全文浏览量: 536
- PDF下载量: 472
- 被引次数: 0
