

Robust Self-triggered Model Predictive Control for Accurate Stopping of High-speed Trains
-
摘要: 列车精确停车作为列车自动运行(Automatic train operation, ATO)系统的一项核心功能, 对高速列车的安全和高效运行至关重要. 本文针对高速列车停车过程的特点, 考虑在避免控制输出频繁切换的前提下实现高精度的停车曲线跟踪, 提出了基于模型预测控制(Model predictive control, MPC)的精确停车算法. 针对列车停车过程中外部不确定性阻力干扰, 采用鲁棒模型预测控制方法, 提高对外部干扰的鲁棒性. 引入自触发控制策略, 以进一步减少控制输出的频繁切换, 提高停车过程的舒适度. 该方法不需要每个采样时间都求解线性约束二次规划问题, 降低了对系统采样和通信能力的要求, 提高了算法的实用性. 分析结果表明, 高速列车精确停车控制方法的稳定性和性能指标的次优性可以得到保证. 基于高速列车实际运行数据的仿真结果验证了算法的有效性.Abstract: Accurate stopping is a key technology of the automatic train operation (ATO) system and plays an important role in safe and efficient train operations. This paper presents a model predictive control (MPC) based train stop control method according to the characteristics of train stopping processes, which can realize high-precision speed tracking and avoid frequent switching of control output. Considering the uncertain disturbance from the external environment, a robust MPC method is adopted to improve the robustness for external disturbances. Then, a self-triggered control scheme is introduced to reduce the frequent switches of the control output. Furthermore, the control scheme does not require calculating the linear constraints quadratic programming problem at all times resulting in lower sampling and communication requirements. The stability and sub-optimality of the approach can be guaranteed. The simulation results based on the real-life operation data verify the effectiveness of the proposed method.
-
随着2022年北京冬季奥运会申办成功, 在"带动三亿人参与冰雪运动"的口号指引下, 我国冰雪运动呈现蓬勃发展的态势.一直以来, 体育比赛的竞技水平都与运动科学密切相关, 其中运动生物力学(Sport biomechanics)是与其联系最紧密的学科.冰雪运动生物力学通过研究人体参加冰雪运动的力学规律, 能揭示出冰雪运动发生的内在机制, 建立正确的技术模式, 从而为运动员技术诊断和训练改进提供理论依据[1].此外, 冰雪运动生物力学对运动创伤的防治[2-3]、运动器械的改良[4-5]以及仿生机器人的设计[6]等也起到了良好的促进作用.
据统计, 地球表面12 %的陆地被冰雪永久覆盖, 若加上季节性冰雪这一比例高达33 %.长期以来, 囿于环境的限制, 人类在冰雪环境中的活动相对较少.伴随着以深度学习为主要代表的人工智能技术的兴起, 机器人在非机构化的环境中取代人类工作渐成趋势.随着世界各国极地开发战略趋热, 预期未来对面向冰雪环境具备高度智能化的机器人将出现巨大需求, 其在极端条件下的科学考察、军事作战等任务中将具有不可替代的作用.
然而, 目前冰雪机器人的研究仍处于相对空白的阶段.与此对比的是, 在过去的几十年中, 普通动态双足机器人在很多方面都取得了突破性进展[7].最具代表性的当属2018年引起普遍关注的美国Boston Dynamics公司研发的Atlas类人机器人, 其自发布以来, 就走在了类人机器人研究的前沿, 不仅能够像人一样奔跑, 还掌握了单脚站立、后空翻和连续跳跃以翻越障碍等技能[8].对比来看, 在普通类人机器人研究中, 通常假设地面处于水平(或接近于水平)状态, 并且具有足够的表面摩擦以防止脚底滑动.然而, 冰雪环境正好脱离了这些基本假设, 现有的双足控制理论难以奏效.
借助冰雪运动生物力学的研究成果, 设计以双足机器人为基本样式的冰雪机器人, 能够为高速、高机动类人机器人的稳定性、鲁棒性及控制理论优化等问题提供新思路、新方法、新技术.值得一提的是, 2018年韩国平昌冬奥会举办了一场表演性质的滑雪机器人比赛, 引起了媒体的广泛关注.这一方面反映出公众对此类特种机器人的期待, 另一方面也表明当前业已处于冰雪机器人研究的萌动阶段.因此开展冰雪机器人研究是一项具有综合性创新意义和应用价值的课题.
本文针对冰雪运动生物力学及其相关机器人研究进展展开论述, 组织结构如下:第1节介绍冰雪环境下的摩擦力理论.第2节论述空气阻力的影响因素以及减阻措施.第3节根据建模的方式介绍冰雪运动生物力学研究中常用的测量方法.第4节根据模型的复杂程度讨论研究中用到的数学建模方法.第5节调研冰雪机器人的研究现状, 分析平台设计、稳定性和导航控制三项关键技术, 并对可能的发展思路进行展望.
1. 冰雪环境下的摩擦力学研究
相对于环境中的其他力, 摩擦力无疑是冰雪环境中起重要作用的一类力, 因此有必要讨论一下相关研究成果.冰雪环境下的摩擦力理论主要分为三种流派:干摩擦理论、湿摩擦理论以及混合摩擦理论.
1.1 干摩擦理论
干摩擦理论通常将器具与接触面之间的相对运动视为固体间的相互作用.从微观上来说, 固体表面并不绝对光滑, 而是布满凹凸状的起伏.不同固体接触时, 接触面会产生物理或化学性质的黏合作用.当两者发生相对运动时, 破坏粗糙表面黏合作用的力即为切向摩擦力(Tangential friction):
$ \begin{equation} \label{equ:dry.friction} {F}_{T}={{\tau }_{c}}{{A}_{c}}=\mu ({{\tau }_{c}}, H){{F}_{N}} \end{equation} $
(1) 其中, ${\tau }_{c}$是剪切强度, ${A}_{c}$是实际接触面积, 可以理解为微观接触面的积分, $H$是材料的硬度.一般认为接触面压力$F_N$和$H$的比值与${A}_{c}$呈正相关.因此摩擦系数也取决于剪切强度和材料硬度.一般而言, 干摩擦会有相当高的摩擦系数, 例如, 据测定冰–冰之间的摩擦系数高达0.4$\, \sim\, $0.8[9-11].
干摩擦理论只考虑压力和材料的性质, 未将更复杂的因素考虑在内, 是最基本的摩擦力模型.实际冰雪运动中, 器具的速度、接触面的温度等都是时刻变化的, 同时冰雪的材料性质在压力和摩擦发热作用下也不是恒定的.因此, 干摩擦理论可以看作是温度$T$远远低于冰雪熔点温度$T_m$情况下的一种理想模型.
1.2 湿摩擦理论
在自然气压下, 即使温度再低, 理想的干摩擦也不存在, 因为接触面总会存在至少若干分子厚的液态膜[12].关于液态膜产生的机理, 目前尚未有定论[13], 学者们都倾向于摩擦生热提高了接触面的温度[14].另外压力也被认为起到了一定的作用, 即在压力作用下, 冰雪晶体的结构遭到破坏, 导致其熔点降低[15-16].
液态膜起到了润滑作用, 赋予了摩擦力流体动力学性质.当接触面存在完整的液态膜时, 摩擦力等效于层流下的黏性阻力:
$ \begin{equation} \label{equ:wet.friction} {F}_{T}=\frac{\eta v{{A}_{c}}}{h}=\mu \left( T, v, H, h \right){{F}_{N}} \end{equation} $
(2) 其中, $\eta$是水的动态粘度, 其与界面的温度$T$有关. $v$是器具的运动速度, $h$是液态膜的厚度. $h$的计算依据滑动方式和融化速率不同而不同[17-18].尽管目前并未有设备直接测量到液态膜的厚度, Maeno[19]估计其数量级为100 nm.在滑雪速度低于40 m/s时, 有学者推测$h$明显会小于50 nm.
1.3 混合摩擦理论
在大多数情况下, 摩擦力无法简单归类为干摩擦或湿摩擦.前者要求接触面不能存在冰雪融化的现象, 后者要求接触面完全由液态膜承载, 两者在实际中都难以独立存在.而混合摩擦理论将接触面沿着运动方向划分为多个微元, 单独计算每个微元上的摩擦力.每个微元摩擦力可以用干摩擦、湿摩擦或者二者的线性组合来近似估计.最终每个接触微元积分得到的合力即为总的摩擦力:
$ \begin{equation} \label{equ:mixed.friction} {F}_{T}=\sum\limits_{i=1}^{n}{{{\mu }_{i}}{{F}_{N, i}}} \end{equation} $
(3) 其中, ${\mu }_{i}$和${F}_{N, i}$分别为每个微元上的摩擦系数和压力.显然, 混合摩擦理论看起来完备, 但是实际操作起来却并不实用.如何确定每个微元适用的摩擦力模型及对应参数(液态膜厚度、边界压力和接触面积等)是一个相当困难的优化问题. Nachbauer等[20]认为滑板的前半部分主要表现为干摩擦性质, 后半部分由于摩擦生热主要表现为湿摩擦性质.为将问题简化, Nachbauer等假设滑板每个区域产生的热量恒定, 并且全部传导到雪内, 并根据热传导模型解析求出了干摩擦区域的长度.一般地, 需要求解接触面的力学方程以正确估计冰雪融化率, 难点在于需要确定不同湿度情况下热量的产生速率、热耗散对融雪的影响和压力对液态膜厚度的影响.对此, Lozowski等[18, 21]和Bäurle等[22]分别以冰和雪为对象提出了类似的模型, 这些模型均用数值模拟来求解一系列复杂方程.
2. 冰雪运动中的空气阻力研究与优化
根据空气动力学常识, 物体受到的空气阻力与运动速度的平方成正比, 因此空气阻力往往是竞速运动中受到的最主要的阻力(据估计能占到80 %).尤其对高水平赛事(如速度滑冰、高山滑雪和跳台滑雪等), 运动员服装或者技巧上的微小差异可能会对比赛结果产生重大影响.举例来说, 2006年多伦多冬奥会男子高山滑雪超大回环项目, 第三名和第四名的成绩仅仅相差0.10秒(0.11 %), 女子组更甚, 相邻名次仅有0.03秒(0.03 %)的差距[31].鉴于竞速运动的高度竞争性, 优化空气阻力成为大幅提高比赛成绩的一个重要途径.空气阻力的计算可以表达为如下:
$ \begin{equation} \label{equ:air.drag} {D}=0.5A\rho {{C}_{D}}{{V}^{2}}=f\left( A, {{C}_{D}}, {V} \right) \end{equation} $
(4) 其中, $A$是迎风面积, $\rho$是空气密度, $C_D$是无量纲阻力系数, ${V}$是迎风速度.由于$\rho$为常量, 因此阻力可以写成等式最右边的形式, 即空气阻力主要由迎风面积、阻力系数和速度决定.其中阻力系数$C_D$由多种互相耦合的变量决定, 是三者中最为复杂也是在减阻中起决定作用的变量.
总的来说, $C_D$可以近似为运动员的动作技巧(Motion)和表面特性(Surface)的方程: $C_D=f$ (motion, surface).动作技巧包括了姿态、速度、振动和加速度等信息, 影响着运动员整体表现.表面特性由运动员所着运动服装决定, 涉及到表面结构、透气性和涂层等因素.值得注意的是, 动作技巧和表面特性并不是完全独立的, 动作效果的展现依赖于运动服装的选取, 同时每种服装也只能在特定的运动状态下才能达到最优的减阻效能.
2.1 形状阻力
形状阻力是空气阻力最主要的构成部分, 与迎风面积有着最直接的关系.优化运动员姿态和采用紧身运动服装均能减小迎风面积.
早在上个世纪70年代, Watanabe等[32]就姿态变化对空气阻力的影响进行过详细的分析, 但当时所用的运动装备和现在比赛级的装备相差非常大.据Fuss[33]测定, 滑雪时低阻姿态相对于高阻姿态平均能够减少40 %的空气阻力. Lee等[34]基于Kriging优化方法结合3D-RANS (Reynolds-sveraged navier-stokes)方程的流动分析, 对跳台滑雪的姿态进行了数值优化.仿真结果显示, 与参考姿态相比, 最佳姿态的升阻比提高了28.8 %. Kyle等[35]和Brownlie等[36]注意到宽松的运动服会增大迎风面积, 致使阻力增加约40 %.此外, Kyle等在观察中还发现, 尺码大两号的运动服使得越野滑雪运动员增加了约3 %的阻力.因此, 为尽可能降低空气阻力, 紧身运动服装已经是竞速运动的标配.
2.2 运动学因素
除了形状阻力, 空气阻力还与运动员的运动状态密切相关:
1) 速度.在空气动力学中, 一般会将速度与雷诺数$R_e$联系起来. $R_e$是惯性力对黏性力的比值, 通常用于表征不同的流动状态, 例如层流(低$R_e$)和湍流(高$R_e$).界于层流和湍流之间的$R_e$称为临界$R_e$. Oggiano等[37-38]发现平缓的表面能够降低临界$R_e$对应的速度.
2) 振动.室外的冰雪运动, 运动场地并不是完全光滑的.受地表不均匀起伏的影响, 冰雪器具在高速运动时极易产生振动, 这种振动不可避免地会传递到身体其他部位, 从而改变身体的气动布局.据测算, 滑雪速降中作用到雪板上的载荷高达5$\, \sim\, $30 g, 并伴随5$\, \sim\, $30 Hz的振动[39].
3) 攻角.攻角是身体运动方向相对于气流的夹角, 与运动员的姿势有直接关系.研究表明, 跳台滑雪中身体的攻角是决定滑翔距离最重要的因素[40]. Lee等[34]的研究也发现, 相对于参考姿态, 最优姿态的升阻力提升了28 %.
2.3 表面阻力
表面阻力主要受运动服装影响, 这一部分阻力在整个空气阻力中占比(形阻为主, 约80 %)不是很大.然而高水平的比赛通常呈现出时间跨度大, 决胜时间短的特点, 这使得最终结果对空气阻力及其相关的能量损失非常敏感[41].
事实上, 不仅是科研人员, 运动品牌生产商更注重运动服装减阻机制的研究.例如早在2002年盐湖城冬奥会上, NIKE推出的新型服装Swift Skin就号称带来了10 %的减阻效果.比较有说服力的事实是59名身着新型服装的运动员在奥运会的平均表现超过了他们个人历史最佳成绩的1.03 %[42].此外, 衣物的面料、涂层、拉伸[43]和透气性[44]等指标都会对表面阻力产生影响.
3. 冰雪运动生物力学研究中的测量方法
运动员可视为一个自由度非常高的运动系统.为了对运动员进行运动学(Kinematics)和动力学(Kinetics)研究, 需要对他们身体的主要部分(腿、手臂、头部和躯干等)的运动进行精确的三维重建.
表 1 不同变量对摩擦系数的影响Table 1 Influence of different parameters on the friction coefficient符号 变量含义 与摩擦系数的关系 潜在原因及说明 文献 $T$ 温度(Temperature) $-7$至$-2$ ℃下取得最小摩擦系数, 超出范围摩擦系数均呈增大趋势 温度过低时, 接触面为固–固摩擦, 呈现干摩擦性质; 温度接近熔点及以上时, 液态膜厚度明显增加, 接触面的毛细管桥引入附加阻力 [23-26] $v_s$ 滑动速度(Sliding velocity) 速度越快, 摩擦系数越小 高速相对于低速产生更多热量, 提升接触面的润滑效果 [22, 25-26] $A_c$ 表观接触面积(Apparent area of contact) 接触面积越大, 摩擦系数也越大 接触面较小时, 单位面积摩擦释放的热量越大, 有效提升润滑效果, 反之面积越大, 接触点越分散, 润滑效果越差 [16, 22] $R_a$ 表面粗糙度(Roughness) 表面越粗糙, 摩擦系数越大 增加表面的粗糙度导致在滑动运动期间增加实际接触面积和更多的互锁接触点, 最终增加磨损率和总摩擦 [28-29] $R_w$ 润湿性(Wettability) 亲水性材料易于润湿表面, 摩擦系数高, 接近熔点处尤甚 不具备支撑作用的冰雪颗粒易于通过毛细管桥与亲水材料相连, 毛细管力引入附加阻力 [27] $R_H$ 相对湿度(Relative humidity) 相对湿度在滑动初始阶段影响较大, 相对湿度越大摩擦系数越小 湿度越高, 接触面润滑效果越好, 摩擦力越小, 目前相对湿度的研究较少, 需要更多实验数据来支撑 [30] $\lambda$ 热导率(Thermal conductivity) 良好的热导体摩擦系数更高 导热率高意味着接触面获得的热量变少, 不利于液态膜厚度增加 [30] 3.1 运动学数据测量方法
运动学建模描述的是身体各段在三维空间内随时间的变化规律, 关注的焦点是各体段重心的位置、速度和加速度等数据, 测量的手段主要分为三类:基于光学系统(红外光、2D或3D视频)的测量[45-47]、基于GNSS (Global navigation satellite system)的测量、基于IMU (Inertial measurement unit)的测量.
基于红外光的测量方法曾经被广泛应用于室内环境下的3D运动学分析, 但是其效果在室外环境下不佳.相比之下, 基于视频分析的测量方法环境适应性更强, 同时对运动员的干扰最小, 数据量也更丰富, 只用数量非常有限的相机就能得到相对大范围的数据.基于GNSS/IMU的测量方法允许分析的运动范围更宽, 缺点是对运动员有干扰且准确性难以保证.为提高准确性, 通常使用传感器融合的方法处理GNSS和IMU数据.
3.1.1 基于视频分析的测量方法
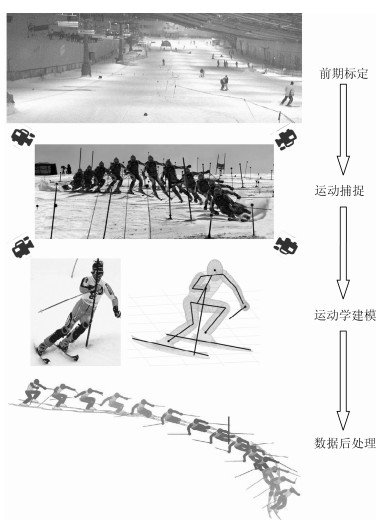
如图 1所示, 传统的基于视频分析的三维运动学建模一般可分为以下四个步骤:
1) 前期标定.为保证每个瞬间采集数据的准确性, 所有相机和参考点的位置在实验开始前都要用经纬仪提前校准.
2) 动作捕捉.首先被测人员的感兴趣部位一般会贴有参考标志, 实验时必须保证参考标志至少在两台相机的视野中同时出现, 并配有同步器来校准不同视频序列的时间戳.其次用于3D重建相机的光轴应尽可能垂直于捕捉框, 且被拍摄主体应尽可能占据相机视野, 以提高重建精度.最后相邻监控子空间应有所重合, 以保证数据的连续性.
3) 运动学建模.每个相机捕捉的数据经过时间同步后, 输入视频分析软件.软件根据前期校准好的信息, 将图像的二维像素信息转换为三维空间坐标, 即可得到运动员身体关键点随时间变化的位置.
4) 数据后处理.将建模数据用于分析动作技巧、能量损耗等.
随着深度学习的兴起, 一些研究者也在尝试用弱监督的方法从多视角的图像中直接训练出运动员的三维姿态, 以克服传统方法费时、费力的缺点[47].总的来说, 基于视频分析的三维运动学建模的准确性已经在野外环境经过了多次验证, 以至于常作为测量标准.然而为保证运动员在图像中始终保持一定尺寸, 视觉测量系统通常会在多个固定位置布置摄像机或者采用具有平移(Pan)、倾斜(Tilt)和变焦(Zoom)功能的摄像机全程跟踪拍摄, 因而费效比高且重建过程极为费时, 这些都不利于高速运动的研究.
3.1.2 基于GNSS的测量方法
随着电子设备的逐渐小型化, 冰雪运动的研究正越来越多使用GNSS获取运动员位置信息.迄今为止, 基于GNSS的测量方法主要有:非差分GNSS方法[48]、实时差分GNSS方法[49]和后处理差分GNSS方法[50], 其中有些仅使用美国GPS, 有些则是将GPS与俄罗斯的GLONASS结合起来使用.
值得注意的是, 由于GNSS天线设备一般安装在头部或者颈部, 因此GNSS数据仅允许重建天线的轨迹和速度, 而不是运动员的完整3D运动学模型.不过一些研究者提出仍然可以通过建模的方法来估计CoM (Center of mass)对天线的相对位置, 从而再次估计出CoM的绝对位置[51-52].在这些研究中, 运动员可以看作是以头部天线为基底的倒立摆系统, 在任何给定时间内系统都处于动态平衡中.当运动员的径向速度为0时, 倒立摆处于中立位置.当转弯发生倾斜时, 摆锤与地面的交点即为脚部的位置, CoM可由人体学数据估算得出.
3.1.3 基于IMU的测量方法
最近几年, 使用微机电系统(Microelectromechanical systems, MEMS)传感器(如陀螺仪、加速度计和磁力计)构建的IMU惯性运动捕捉系统已开始被应用于以运动为重点的生物力学研究中[53], 其应用原理与用于汽车、轮船、飞机和航天器的一般捷联惯性导航系统(Strapdown inertial navigation systems)相同.运动员身体被划分为多个不同的体段, 每个IMU模块跟踪其所绑定体段的运动, 最后将身体各部分的运动连接起来即可获得每一个时刻运动的姿态. Fasel等[54]用七个惯性传感器来估计和验证了基于七段体模型的各体段CoM与关节位置之间的相对位置, 但是没有计算空间中的关节和各体段CoM的绝对位置.
基于IMU的方法的优点在于可以全程跟踪整个运动过程而不受场地限制, 如一些研究团队将其应用于高山滑雪, 并成功地记录了由多个回转组成的完整赛道的运动数据[55-57].但其缺点也很明显, 尽管MEMS陀螺仪对于角速度测量是精确的, 但是只能在短时间内用于计算角度.此外方向和位置估计算法的固有漂移还限制了系统的长时间稳定应用[52].依目前的文献调研结果来看, 对于存在冲击和长距离的高动态运动, 仍然缺乏基于IMU的测量精度的误差评估, 同时在不进行传感器数据融合的情况下消除漂移的改进算法仍然存在一定局限性[58].
3.1.4 基于数据融合的测量方法
如前所述, 基于GNSS的测量方法和基于IMU的测量方法优劣互有补充, 为了重建运动员的完整的3D运动学, 往往将两者结合起来[59-60].
图 2给出了基于IMU和GNSS数据的融合算法一般流程, 将低采样率(约1 Hz)的GNSS数据与高采样率(约50 Hz)的IMU数据融合能够估计运动员身体部分的位置、速度和方向.这种方式还可以补偿因动态加速度测量和角速度漂移引起的误差.与基于视觉分析的测量方法相比, 尽管建模精度有一定损失, 但是数据融合方案更简单易用, 也更适用于长距离的运动跟踪.
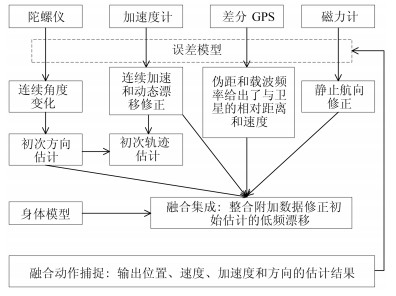 图 2 基于IMU和GNSS测量的数据融合积分算法框图Fig. 2 Block diagram of sensor fusion integration algorithm for IMU and GNSS measurements
图 2 基于IMU和GNSS测量的数据融合积分算法框图Fig. 2 Block diagram of sensor fusion integration algorithm for IMU and GNSS measurements3.2 动力学数据测量方法
动力学建模描述作用到运动员身体上的力与运动的关系, 可以深入研究运动产生的基本机制.从受力的组成上来看, 运动员主要受内力和外力.内力由运动员肌肉产生, 运动员利用一定的运动技巧可以引导躯体和四肢来操纵设备以获得期望的外力.定量测量内力比较困难, 然而一些研究者提出可以用肌电图(Electromyographic, EMG)监测与运动有关的肌肉的收缩和舒张状态[61], 进一步可将该方法获取的数据用于规划双足机器人的步态[62].外力由三种力组成:重力、空气阻力和地面反作用力(Ground reaction force).目前研究重点主要集中在后两者上.
空气阻力的研究一般是通过风洞和野外实验来完成的, 其中野外实验多用于定性分析空气阻力的影响要素, 定量研究一般只能在风洞内完成[31, 63].测试的主体既可以是运动员也可以是人体模型, 前者灵活度高, 可以随时应实验要求改变姿势或者对姿势序列进行研究, 这种已经非常接近比赛的实际状况, 后者实验一致性高, 方便排除无关干扰, 同时还能够在模型体表分布探针, 以获得体表的三维风速场[64-65].定量进行空气阻力研究的主要目的是减阻, 因为影响空气阻力的因素往往非常多, 如图 3所示, 借助风洞实验可以确定最优的减阻策略.
地面反作用力因在运动员施加载荷下冰雪抗压和抗剪切力而产生.目前测量地面反作用力的方式可以概括为三种独立方法:基于3D运动学分析(基于图像或GNSS/IMU)的估计法, 基于应力转换器的测量法和足底压力测量系统(压力鞋垫系统).除此以外, 惯性磁测量单元(Inertial-magnetic measurement units, IMMU)也被用于着陆动量的测量[66].
基于应力转换器的测量法和足底压力测量系统工作原理很相似, 都是测量腿部/脚底的受力.应力传感器通常被放置于滑板与绑腿[67]或雪板与绑腿[68-69]之间, 由多个传感单元组成, 可以测量三个维度的力.足底压力测量系统将脚上施加的压力转化成对应比例的电信号(电压或电流)输出, 通过测量电信号即可获得脚上的压力.因此, 足底压力测量系统不是直接测量地面的反作用力, 而是测量传感器内底的垂直方向的压力.然而地面反作用力与脚下的压力并不完全对等.运动中某些动作(如侧向推雪)可能伴有较大的剪切力, 此时压力测量系统获得的数据无法充分反映地面的反作用力[70], 这是采用这一方案需要注意的地方.上述两种测量方法, 都有成熟的商用产品可供选择, 不用科研人员自行设计. 表 2总结了两种力测量方法的优缺点.
表 2 应力转换器和压力鞋垫系统优缺点对比Table 2 Comparison of force transducers and pressure insole systems优点 缺点 应力转换器 能够测量三维力和力矩; 测量的力较为准确, 可被认定为标准值 较重(约0.5 kg$\, \sim\, $1.0 kg); 改变滑雪设备的特性(刚度和高度) 压力鞋垫系统 尺寸小, 适合野外使用; 对运动员干扰小 只能测量足部与鞋垫垂直方向的压力; 测量精度目前仍有待验证 4. 冰雪运动生物力学的数学建模方法研究
运动主体与冰雪环境的交互作用本身是一个非常复杂的问题, 因而对参加冰雪运动的人进行数学建模一直以来都是非常具有挑战的任务.然而尽管精确的模型难以获得, 一个粗略的建模框架仍然对深入理解冰雪运动发生机制有着重要的指导作用.此外, 数学模型还有很多吸引人的优点:
1) 可以在实验测试中以更少的时间和成本进行详尽的灵敏度分析, 并且不用承担人员受伤的风险.
2) 野外实验易受多种因素(天气、雪地特征、运动员疲劳程度和传感器误差)的影响, 相对比而言数学模型的结果有其确定性, 可重复度高.
3) 模型的参数都可单独控制和修改, 便于验证其作用.
从冰雪运动的组成看, 其主要分为滑雪、滑冰、橇类、冰壶和冰球等几类运动.由于运动形式各异, 其建模方式也迥然不同.冰壶运动相对来说最为简单, 因为无需将运动员加入模型之中, 冰壶可以简化为二维平面上运动的质点, 理论上其质心可以用方程精确表述.在橇类运动中, 运动员置于橇具之上, 通过控制橇具来实现方向和速度控制.因此可以粗略认为运动员本身的姿态对比赛结果并不占主导地位, 其建模可简化为一维或者二维平面上的粒子模型[71-72], 同时可引入驾驶员模型来获得橇具沿期望路径运行所需的力.如果将冰球运动归入滑冰运动, 则能够为冰雪机器人的研究提供借鉴思路的主要是滑雪或滑冰建模.事实上从文献调研的结果来看, 学者们的研究主题也主要集中在二者上, 尤以滑雪建模为主.为保持本文话题的一致性, 本节主要论述滑雪/冰建模方法.
现有文献中所提出的滑雪/冰模型具有不同的复杂度, 维度从质点模型、2D模型到3D模型不等, 所针对环境从越野滑雪、高山滑雪到短道速滑都有所涉猎.
4.1 质点模型
质点模型忽略了身体的姿态和形变, 将滑雪者简化为质点, 极大降低了建模的难度.早在上世纪70年代, Morawski[73]提出了基于一阶倒立摆的建模方法, 整个模型可以表述为雪板与质点或单刚体连接的组合体.
在基本模式难有变化的情况下, 将雪板的柔性或者雪地的特性引入模型成为发展质点模型的一个主要思路. Kawai等[74]提出的模型将滑板建模视为非均匀正交各向异形板, 同时也赋予地面一定的弹性. Lieu等[75]和Hirano等[76]均将滑雪者视为刚体, 但前者基于欧拉–伯努利梁理论对雪板建模, 后者利用射流类比运动员与地面间的相互作用.在Bruck等[77]的模型中, 雪板被简化为19个可扭转和可弯曲的弹簧和阻尼器的连接体, 其复杂度进一步增加. Rudakov等[78]也基于质点模型提出了一种面向障碍滑雪识别最优滑雪轨迹的简单方法.在该研究中, 滑雪者被建模为通过无重力刚性杆与雪板连接的质点.
尽管质点模型有利于降低建模的复杂度, 然而其缺点也是显而易见的:过于简单的模型无法准确表征人体的运动姿态; 建模方式的有效性有待验证; 模型提供的信息量较小, 在指导运动员训练等实际应用场景下提供的信息有限.
4.2 2D模型
2D模型相对于质点模型复杂度大大增加, 但是更高维度的建模优势在于:引入新的自由度能够更加详细描述人体的运动(如身体形变); 可用于更精细地研究滑雪的相互作用.增加的复杂性通常带来更多信息和准确性, 但同时也意味着更高的计算量和更多的数据, 以保证结果的可靠性.
如图 4所示, 为研究滑雪者在复杂条件下的2D动力学, Chen等[79]提出了一种2D多体段模型.在模型设计方面, 滑雪者被简化为4段刚体和3个铰链关节的组合体. Chen等的工作的创新之处在于, 雪板被分割为多个离散区域, 用于计算与雪地的相互作用, 这样非常有利于非平面地形的仿真.模型可简化为如下形式:
$ \begin{equation} \label{equ:2D.model} M\left( t, {\pmb q} \right)\ddot{\pmb q}=Q\left( t, {\pmb q}, \dot{\pmb q} \right) \end{equation} $
(5) 其中, $M$是质量矩阵, ${\pmb q}=\left[ x, y, {{\theta }_{0}}\cdots {{\theta }_{n}} \right]$是归一化的广义坐标, 包含了滑雪者的重心位置和姿态, $\theta_0$表示雪板与地面的夹角, $Q$是广义力矩阵, 包括了归一化的科里奥利力、关节作用力、控制关节的扭矩和空气阻力等.该模型在多种复杂环境下(包括斜坡、跳跃等)进行了数值仿真, 给出了滑雪者的位移、速度、起跳角度等信息, 并与运动员的训练数据进行了对比.即使只考虑2D运动学, 所提模型还是能够用于模拟身体位置对速度曲线、落地的关节负荷或花样滑雪质量的影响, 这些信息可用于提高训练水平.
沿着相似的研究思路, Heinrich等[80]提出了一种更为复杂的2D多关节模型, 其目的是研究着陆姿态与前十字韧带(Anterior cruciate ligament, ACL)所受作用力峰值的因果关系.具体地, 该模型包含了七段刚体, 分别代表人的各个体段.雪板与下肢连接处采用线性弹簧–阻尼元件, 以模拟雪板的柔性, 同时创新性地引入肌肉–骨骼模型来驱动相邻体段的关节.基于该模型可以将式(5)改写为:
$ \begin{equation} \label{equ:2D.model2} M\left( t, {\pmb q} \right)\ddot{\pmb q}= Q\left( t, {\pmb q}, \dot{\pmb q} \right)+R\left( {\pmb q} \right){{F}_{m}} \end{equation} $
(6) 其中, $R({\pmb q})$为与肌肉相关的矩阵, $F_m$为肌肉矢量力, $R\left( {\pmb q} \right){F_m}$为关节净力矩.数值模拟的结果表明, 增加滑雪者的质心和支撑点的距离会导致更高的受伤风险.这些结论与伤害分析得出的结论非常一致, 并能够为运动员的姿态调整提供有用的信息.
在Fintelman等[81]提出的速滑运动员模型中, 运动员的整个身体简化为左右冰鞋和身体重心三个质点, 并且只考虑其在二位平面内的运动.根据该模型, 可以将式(5)改写为:
$ \begin{equation} \label{equ:2D.model3} M\left( t, {\pmb q} \right)\ddot{\pmb q}= -{{F}_{\rm friction}}\left( t, {\pmb q}, \dot{\pmb q} \right)+{{F}_{\rm constraints}}\left( t, {\pmb q}, \dot{\pmb q} \right) \end{equation} $
(7) 其中, 约束项${F}_{\rm constraints}$基于腿部与冰鞋连接且冰鞋始终接触冰面的假设, 即由冰鞋引起的约束方程必须满足滑冰的零横向速度条件.摩擦项${F}_{\rm friction}$可以将冰鞋与冰面的摩擦和空气阻力一起纳入考量, 这两类力都有各自的分析方法.
表 3 几种典型的数学建模方法Table 3 Several typical mathematical modeling methods文献 维度 场景 研究目标 体段数 实验数据 建模方法 Kawai等(2004)[82] 3 滑雪 基于计算机图形学开发一个新的滑雪控制模型, 用于模拟滑雪者重心与地面的相对运动, 以及滑雪运动员对雪板的作用力 15 基于视频数据的二维运动数据 计算机辅助3D人体建模; 多体系统仿真 Holmberg等(2008)[85] 3 滑雪 越野滑雪双极推撑滑行技术的生物力学分析, 用于和相关文献中的数据进行对比 64刚体, 464肌肉 基于视频数据的二维运动数据; 手杖对地面作用力 右侧上半身和手杖的三维逆向动力学; 带约束的牛顿–欧拉方程; 未考虑地面与雪板的作用力 Chen等(2009)[79] 2 滑雪 考虑地面作用力和空气阻力的二维滑雪模型 4 人工设定的仿真数据 基于牛顿–欧拉方程的二维逆动力学模型; 雪–地作用力用基于库伦摩擦力的刚性离散点接触模型来描述 Oberegger等(2010)[88] 3 滑雪 三维多体滑雪者模型来模拟连续转弯 7 基于三台同步相机分析获得滑雪者和滑雪板上标记的3D坐标 带约束的牛顿–欧拉方程; 运动路径作为约束给出, 并不依赖于模型与环境的交互; 引入非完整平衡条件 Rudakov等(2010)[78] 1 滑雪 特殊障碍赛中滑雪轨迹的优化 2 经验数据和仿真数据 多项式拟合质心轨迹, 最小化方法优化参数 Fintelman等(2011)[81] 2 滑冰 提出简单的直线速度滑冰模型以模拟和优化速度滑冰的生物力学 3 商用局部位置测量(Local position measurement, LPM)系统; DAQ力采集系统; 高速相机系统用于同步上述两者 只考虑了二维运动, 包括空气阻力、冰鞋库伦摩擦力; 两种约束:垂直方向上的完整约束、横向上的非完整约束 Bruzzo等(2016)[89] 3 滑雪 越野滑雪三维多体动力学模型, 对单个推进阶段建模, 以获得运动中设计的动力学参数 3 16个相机的运动捕捉系统, 采样频率达1 000 Hz; 配备力传感器的雪板; 视觉速度指示器指导运动员动作 多体系统动力学建模 Kruk等(2017)[90] 2 滑冰 直道速度滑冰运动生物力学模拟 3 配备力传感器的冰鞋; 20个相机组成的动作捕捉系统 基于全局优化逆运动学估计每个身体段的重心 4.3 4.3 3D模型
在真正的冰雪运动中, 运动员都是在3D空间中施展复杂的运动以不断变换自己的位置.虽然2D建模能够在某些场景对运动员进行一定的近似, 但无法适用更多的场景, 如滑雪者在坡道上大回转.此外, 将3D运动简化为2D运动进行分析显然舍弃了一个维度的信息.因此3D运动建模理论上比2D建模的适用范围更广, 也更具有研究潜力.
3D运动学建模首先是带来自由度的扩张, 并导致计算复杂度的显著增加.其难点并不仅限于此, 如何精确获得运动员本体动作以及和环境的相互作用的数据才是3D建模的核心难点.由于模型自由度很高, 通常只能借用视觉测量系统或者可穿戴传感器来获取室外测试中的运动学数据.在此基础上, 利用逆向运动学可以估计作用于雪板和身体关节的力和力矩, 进一步地还可用于研究不同运动技巧对速度曲线和接触力的影响, 为运动员训练提供有用的数据.
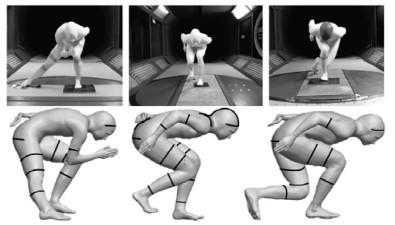
Kawai等[82]提出了一种基于视频数据来定性分析平行式高速转弯(Parallel turn)控制效果的建模方法.该模型能够直观获得滑雪者重心对雪板的相对运动、滑雪者作用到雪板上的力以及雪板的边缘角度. Kawai等的模型给出了3D建模的一个基本范式, 其具体可分为四个步骤:
1) 按照不同身体部位(头部、颈部、躯干、上臂、下臂、手、大腿、小腿和脚, 共15个)构建人体的3D模型.
2) 利用3D-CAD (三维计算机辅助设计)系统绘制平行式高速转弯期间滑雪者的各种姿态, 根据生成的姿势估计滑雪者的重心.
3) 基于室外实验的视频数据, 获取实验者姿态的时间序列, 并在仿真环境中模拟该序列.
4) 从重力和作用在滑雪者身上的三种相对类型的惯性力来估计从滑雪者作用在滑雪板上的三种类型的力.
基于类似方式, 还可以定性分析其他冰雪运动技巧.如Holmberg等[83-85]提出了一种基于测量数据驱动的全肌肉骨骼模型, 用于越野滑雪双杖推撑滑行(Double poling, DP)技术的生物力学分析.该方法在AnyBody建模系统中建立了由人体模型和边界条件组成的仿真模型.模型由肌肉、骨骼和关节三类部件组成, 根据输入关节的动作和受到的外力, 输出各关节的肌肉力.相对于粗略求解人体作用到滑板上的力, 该模型能够求解肌肉产生的作用力, 这也是该方法的核心难点之一. Holmberg等采用了最小疲劳标准, 即以最大相对肌肉力尽可能小的方式分配骨骼上的力, 最终将其转化为一个静态优化问题. Chen等[86]基于轮滑步态的运动和关节角特征, 提出了一种新的滑冰倒立摆模型, 可以用于描述支撑腿的特征, 并讨论了提高轮滑稳定性和减小转弯半径的运动方法.
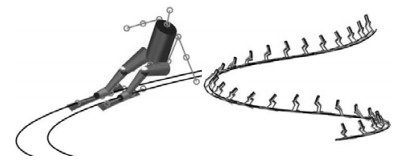
至于前向运动学, 目前来看还无法单独用于优化运动员的运动技巧以获得最优比赛速度或者最小伤害冲击, 但其与逆向运动学结合往往能获得更多的信息. Otten[87]融合了前向和后向运动学提出了一种滑冰仿真模型.尽管模型对人体建模相当完备, 包含了高达19个刚性骨架和160块肌肉, 然而实用性欠缺, 因为运动学的参数都是手动调的, 同时也缺乏有效的测量手段验证其准确性, 不过其为模拟滑冰运动中关节上的力和动量的研究提供了思路.如图 5所示, 在Oberegger等[88]的工作中, 滑雪者多体模型的运动部分基于运动学数据驱动, 用于模拟滑雪过程的一些列转弯(右半转、完全左转、完全右转).实验时, 首先使用逆运动学分析对应的运动序列, 以获得运动量的参考值以及髋关节和踝关节的反作用力和力矩, 然后调整模型中的摩擦系数, 即可利用前向运动学获得滑雪者的速度曲线.
基于测量的数据和构建的模型, 最终可对运动员的表现进行分析、评估和优化.然而值得注意的是, 此项工作与运动的类别、实验条件、竞技策略、甚至被试人员的个体差异等都有密切的联系, 优化的指标也因速度、时间或距离不同而不同, 得出的结论也较为具体与琐碎.考虑本文侧重于论述冰雪运动生物力学的基本研究思路, 以期为冰雪机器人的研究提供借鉴, 为保持本文话题的一致性, 故不再详细总结其在竞技体育中的辅助作用.
5. 冰雪机器人研究进展
顾名思义, 冰雪机器人1是一类面向冰雪环境能够模拟人类冰雪运动的技巧从而借助低摩擦的环境特点推进自身运动的特种机器人.从冰雪运动生物力学方面来看, 冰雪机器人能够显著提升系统数据的测量精度, 一些在人类运动员上难以测量的数据(如内力、能耗等)也能够准确获取, 对理解人类运动, 促进相关工作的深入研究有显著的辅助作用.从类人机器人研究方面来看, 囿于机械、材料、传感器和控制理论等诸多因素, 当前在低摩擦非结构化环境中的机器人自主运动的算法研究还非常不充分, 具有巨大的研究潜力.
1目前并未有冰雪机器人的确切定义, 不过对于雪地摩托等冰雪机械, 其建模方法、运动方式已与人类进行冰雪运动的方式相去甚远, 为保持本文话题的一致性, 故不将此类机器人列入讨论范畴
5.1 研究现状
冰雪机器人以其特殊的研究环境, 目前见诸文献的研究并不多.日本在该领域研究起步较早, 但是并未研制出能够在冰雪环境下工作的样机.欧洲研究的较为深入, 其样机不仅在冰雪环境下进行了测试, 还在环境仿真、系统建模、导航控制、轨迹优化等方面做了丰富的工作.加拿大研究的较晚, 其利用同一平台研发出滑雪和滑冰两类机器人, 同时在机器人步态研究方面也取得了一定成果.需要说明的是, 冰雪机器人的研究都或多或少参考了当前的一些冰雪生物力学的研究成果, 比如雕刻滑雪板比普通滑雪板更易操控, 具体可参考下文各种冰雪机器人的研究现状.
根据文献记载, 上个世纪80年代日本的Shimizu[91]就开发了几款手动控制的滑雪机器人, 旨在探索可能的关节角组合和对应的时间序列, 以完成有效的滑雪转弯.实验表明, 机器人大腿关节的旋转能够导致雪板边缘角度和前进方向的改变, 对滑雪转弯有重要作用. Hasegawa[92-93]和Kodera等[94]在机器人上进行了大腿旋转的模拟. Zehelmayer也展示了几种可以自动转弯的滑雪机器人.遗憾的是, 无法获得原始研究资料, 也无法评估其在滑雪机器人方面的研究水平.
1998年至2009年期间, 日本金泽大学(Kanazawa University)的Yoneyama等[95-97]就致力于用机器人模拟滑雪转弯的研究.如图 6所示, Yoneyama所开发的机器人以舵机为驱动源, 对标人类运动员做到了每条腿都有六个自由度, 脚部还配备有速度和压力传感器.实验在覆有人造草坪的斜坡上进行, 板载计算机控制机器人按照预先编排的一系列滑雪姿势进行动作, 进而评估关节运动、反作用力和转弯轨迹的关系, 最后还将机器人的滑雪效果与顶级运动员的数据进行了对比分析, 并讨论了完成滑雪转弯的模型要求.总的来说, Yoneyama的工作完成度已经足够高, 机器人也有较高自由度.但是舵机驱动的方式限制了各个关节难以反馈角速度和力矩等状态量, 只能开环复现滑雪姿态序列, 使得平台的研究潜力大打折扣.
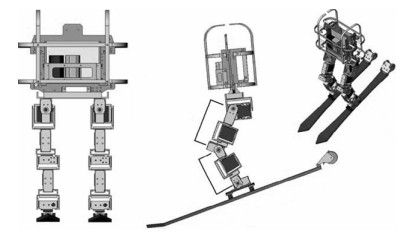 图 6 日本金泽大学研制的滑雪机器人三维结构图Fig. 6 3D structure diagram of skiing robot developed by Kanazawa University in Japan
图 6 日本金泽大学研制的滑雪机器人三维结构图Fig. 6 3D structure diagram of skiing robot developed by Kanazawa University in Japan2008年至2013年期间, 斯洛文尼亚约瑟夫斯蒂芬研究所(Jožef Stefan Institute)的Zǎlajpah团队[98-102]研发了一种三关节的自主滑雪机器人, 如图 7所示.该机器人面向的运动场景是高山滑雪障碍赛, 即机器人需要通过自身传感系统识别雪地上的旗帜, 并自主规划路线, 从而连续穿越旗门以滑动至终点, 期间机器人要保证身体的平衡.为此Zǎlajpah团队做了一系列研究, 包括机器人稳定性分析、多层控制算法设计、移动可视仿真环境搭建、基于视觉的导航策略研究和轨迹优化等.尽管该机器人的自由度还远不能和人类运动员相比, 但是其实现的任务已经基本和人类一致.然而Zǎlajpah的工作还有很大改进的空间, 首先是基于视觉的检测算法在复杂多变的环境中难以准确估计和目标的距离以及极易丢失目标, 其次是机器人的速度并不是显式控制的, 这就要求路径规划算法必须适应当前的速度, 最后是无法对机器人进行完整建模, 同时也难以在机器人上开展雪板与雪地相互作用力的研究.
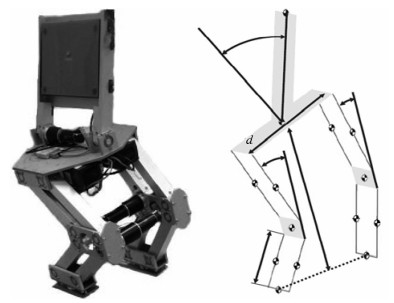 图 7 斯洛文尼亚约瑟夫斯蒂芬研究所研制的三关节滑雪机器人Fig. 7 Three-joint skiing robot developed by Jožef Stephen Institute in Slovenia
图 7 斯洛文尼亚约瑟夫斯蒂芬研究所研制的三关节滑雪机器人Fig. 7 Three-joint skiing robot developed by Jožef Stephen Institute in Slovenia2012年至2016年期间, 加拿大曼尼托巴大学(University of Manitoba)的Chris Iverach-Brereton等以一种商用的DARwin-OP人形机器人为平台, 开发了一种滑冰机器人[103-104]和一种滑雪机器人[105], 如图 8所示, 二者的差异主要集中在脚部配备的是冰鞋还是雪板. Iverach-Brereton等的主要关注点在于低摩擦环境下的双足机器人的运动控制.针对滑冰机器人, 他们开发了一种基于线性倒立摆模型的新步态, 该模型以人类滑冰的物理原理为基础, 利用机器人主动腿的侧向移动, 产生对从动腿冰鞋边缘的牵引力, 推动机器人的前进.针对滑雪机器人, 他们利用一种线性预测模型, 可以根据加速度计的历史数据来推断当前的倾斜度, 从而为机器人主动平衡提供信息.总的来说, Iverach-Brereton等通过改造商用人形机器人实现了两类冰雪机器人的控制和实验, 尽管效果还不尽如人意, 更多的指标还有待测试, 但是其方法显著地降低了冰雪机器人的研究门槛, 为相关领域的研究提供了一个值得借鉴的模式.
 图 8 加拿大曼尼托巴大学研制的滑冰和滑雪机器人Fig. 8 Skating and skiing robots developed by the University of Manitoba in Canada
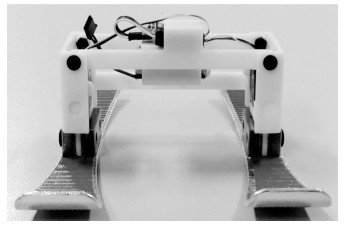
图 8 加拿大曼尼托巴大学研制的滑冰和滑雪机器人Fig. 8 Skating and skiing robots developed by the University of Manitoba in Canada2018年, 日本的Saga等[106]为高山滑雪比赛的初级选手开发了一款被动滑雪机器人, 以用于研究雪板形状和重心位置对转弯效果的影响.如图 9所示, 该机器人共有三个执行机构, 分别位于两侧腿上和横梁上.腿上的舵机用于调整重心高度, 横梁上的舵机用于调整雪板的倾斜度.由此来看, 这种机械设计和图 7非常类似.实验表明, 重心越高, 切换到对侧转弯的时机越晚, 即转弯周期增大.此外, 雪板倾角直接决定了转弯弧的深度.
5.2 关键技术分析
以上对滑雪/冰机器人的研究现状进行了总结和分析, 可以发现目前这一领域的研究团队还比较少, 研究成果还不够丰富.现就研究中涉及的关键技术试做简要分析.
5.2.1 平台设计
冰雪机器人的机械设计按照其研究目标来看应尽可能地模拟人类运动员, 这样借助机器人能最大程度地反映人类运动的效果.鉴于人体的自由度相当高, 设计平台时应有所取舍, 选取关键条件重点考量.总的来说, 关键条件的选取原则有四个重要的参考依据:
1) 人体生理学数据.为了分析人体运动, 必须了解构成身体的主要体段的物理参数, 譬如每个体段的质量、质心位置和惯性矩.这些数据可以通过尸体解剖、身体扫描、模型估计和运动学间接测量等技术得到.设计机器人时可以采用等比例缩放的参数.不过Yoneyama等[97]提出一个简化的滑雪受力模型, 认为滑雪主体受到的合力主要取决于倾斜角度、转弯速度和转弯半径等变量, 而主体内部的质量分布差异并不重要.
2) 雪板/冰鞋.易于操控的雪板或冰鞋对机器人的控制起着重要的辅助作用.在前述的两个滑雪机器人团队都采用了雕刻滑雪板(Carving ski).雕刻滑雪板的边缘呈现一个"抛物线''的形状, 这种长、窄的设计是为了更高的速度和更干净的雕刻转弯(Carving turn).相对于传统滑雪板, 雕刻滑雪板不用侧滑(Sliding)就能实现转弯[98].
3) 运动技巧.滑雪转弯有多种技术, 如犁式转弯、双板平行转弯等, 效果受多重因素影响, 其中滑雪者的身体姿势与重心位置决定了转弯的准确性及连续性.人类可以通过髋关节、膝关节、踝关节等的旋转、屈伸来控制重心位置.在机器人自由度不够的情况下, 应选取主干关节以达到类似的效果.如Zǎlajpah团队的机器人就主要设计了三个关节, 两个腿部关节调整滑板的倾角, 上半身的关节配合调整重心.
4) 专用传感器.机器人可以轻易获取系统内部的状态变量, 如关节的角度、角速度、力和力矩等, 但是对于外部状态, 如速度、地面作用力等, 还需要依靠额外的传感器.作为机电一体化的系统, 为了尽可能消除传感器对机器人的影响, 设计小型、轻质化的专用传感器是必由之路.
目前冰雪机器人的研究还处于初级阶段, 因此应该秉着完成基本冰雪运动的原则进行平台设计, 而不是完全复现人类的行为, 后者以当前机器人的发展水平来看难度仍然很大, 需要机械、电子、材料和控制理论等进一步发展才有实现的可能.
5.2.2 稳定性分析
在低摩擦环境下, 稳定性是决定机器人研究成败的关键指标.对于滑雪机器人, 由于雪板具有一定的长度, 机器人在纵向方向能够获得足够的支撑, 稳定性一般可以保证.在横向方向上, 雪板的支撑平面非常窄, 重心受到的横向力矩变化迅速, 动态平衡条件极易被打破, 导致机器人侧摔.
针对稳定性问题, 目前分为两个思路:主动平衡算法[105]和基于改进ZMP (Zero moment point)的稳定性控制[101].前者面向的是直线滑雪, 通过自身传感器数据能够预测机器人的倾角, 继而设计独立的PD控制器分别补偿在纵向和横向的偏差, 最终无论地面如何倾斜, 都能保证滑雪板与地面齐平且躯干直立.对于后者, 考虑ZMP是检验仿人机器人能否实现稳定步行的主要判据, 即仿人机器人要实现稳定的步行, 其ZMP必须处在由支撑脚构成的凸多边形内.对于滑雪机器人, 当两脚的力平均作用到滑板上时, 机器人一定能够平衡, 此时ZMP落在两腿中间.基于此种思路, Zǎlajpah将稳定性控制拆分为三个任务:控制滑雪的曲率半径, 保证本体在坡道上的稳定性, 抑制由于地面崎岖引起的突然冲击.继而设计了稳定性指标, 该指标与ZMP、当前速度、倾角等变量有关, 控制器可以根据稳定性指标和机器人当前运动选择合适动作, 以实现上述三个任务.
5.2.3 导航控制
导航控制是移动机器人使用场景中非常普遍也是充满挑战的任务之一.以普通双足机器人为例, 其控制思路是首先基于视觉等传感器获取目标位置[107], 继而针对双足机器人模型进行路径规划[108], 最后依靠驱动器控制机器人的关节角.相比之下, 在低摩擦的环境下, 机器人的速度实际上无法精确控制, 导航算法必须适应当前的速度.在速度不可控的前提下, 应重点关注机器人的最小转弯半径, 即在保证稳定的前提下, 机器人转弯的最小曲率半径.
根据所利用数据的不同, 路径规划算法可以分为局部导航和全局导航, 二者的差距在于局部导航仅依赖于机器人自身传感器数据, 而全局导航需要预先提供赛道的数据, 如旗门的位置, 这是关键数据之一.因此, 导航算法也需要分开讨论.对于局部导航, 机器人感知能力非常有限, 此种情况下假定其只能获取与最临近旗门的相对位置, 相对位置数据可以依靠机器视觉得到.此时, 期望朝向与当前朝向的偏差即可作为控制器的输入, 在不低于最小转弯半径的情况下, 可以规划出当前机器人到达最邻近旗门的路径.由此也可看出, 局部导航采用了贪婪算法的思想, 其只能保证与最邻近目标的最优, 无法保证机器人在下下一个目标来临时仍能规划出合理的轨迹.相对而言, 全局导航可以直接获取全部赛道信息, 在机器人动作开始之前, 即可利用智能规划算法(如神经网络)获得最优路径. Zǎlajpah等的实验也表明, 全局导航相对于局部导航, 机器人能跨越更多的障碍, 同时转弯时身体倾角加速度也更小, 这意味着机器人更稳定.
5.3 冰雪机器人研究展望
综上所述, 冰雪机器人作为一类特种机器人, 无论是在冰雪运动生物力学的研究方面, 还是在类人机器人的研究方面, 都具有积极的意义.同时, 以当前阶段的研究现状来看, 冰雪机器人完成度有限, 既没有达到以人类为对象的冰雪运动生物力学的研究深度, 又在稳定性、速度、机动性、环境感知和智能决策等方面距普通类人机器人还有一定差距.最近几年, 得益于传感器技术、自适应控制技术、智能算法的发展, 推进冰雪机器人研究向纵深发展.
5.3.1 高速、高机动研究
普通类人机器人是高维度非线性动态多体系统, 行走时腿部持续不断接受到无规律冲击, 其运动控制涉及到系统内部的动力学特性, 具有阶数高、非线性和强耦合的特点, 因而高速度意味着超高标准的电机控制和先进的步态算法, 长期以来这些都是研究难点.作为对比, 冰雪机器人作为完全被动型机器人, 其动能主要来源于重力势能的转化, 通过调节重力势能的转化速率和与地面作用力产生的阻力损耗率之间的比例关系即可实现速度控制.因环境优势使然, 冰雪机器人能轻易达到普通类人机器人无法企及的速度, 其研究的初衷之一就是利用低摩擦的环境特点比标准步行的机器人更快地穿越地形[104].因此冰雪机器人是研究高速类人机器人的极佳载体.
冰雪机器人的高机动性体现在有更小的转弯半径, 在保证稳定性的前提下能够承受更大的角加速度.冰雪运动一般都有复杂的技巧, 高机动性是实现这些技巧的前提.机动性一部分来源于控制算法的优化, 更重要的是从机器人设计之初就要考虑到机动性的问题.如Yoneyama等[97]的研究表明, 如果完全按照人类比例设计机器人, 机器人的重心会过高, 从而极易摔倒.因此, 低重心、易操控的机械设计能够为后期控制带来明显优势.
5.3.2 环境感知研究
冰雪机器人一般工作在非结构化环境中, 环境感知能力的强弱直接影响到机器人的控制策略及控制效果.最近十年, 随着半导体技术的迅速发展, 片上系统有着越来越强的计算能力, 如Jetson TK1 TX1/2使得开发者能够在嵌入式系统中运行图像识别算法, 同时各种精度更高、采样速率更快、体积更小的传感器也得到了长足发展, 这都为增强冰雪机器人的环境感知能力奠定了坚实的硬件基础.
然而, 冰雪机器人的研究不仅对环境感知算法的处理速度有要求, 其更多地要确保算法的鲁棒性、智能性.近几年, 得益于深度学习的兴起, 人工智能在机器人控制、计算机视觉、语音识别、自然语言处理等传统AI任务上取得了突破性发展.以物体识别为例, 计算机在百万数量级的图片库中, 识别率早已达95 %以上, 这表明人工智能在此类特定任务上已经超越了人类.与此同时, 随着人工智能技术在实验室条件下的不断成熟, 积极推动人工智能技术挑战室外非结构化环境也逐渐成为研究趋势.因此, 依托于冰雪机器人这一特殊平台, 综合运用人工智能技术, 既能赋予机器人超强的地图建模、目标识别等能力, 从而为机器人控制决策提供高维度信息, 又能进一步评估人工智能在更极限条件下的鲁棒性、泛化性.
5.3.3 智能决策平台研究
冰雪机器人开发的一个困难在于特殊的测试环境.加之冰雪环境的复杂多变, 实验效果常受多种变量影响, 仅仅依靠户外实验来测试机器人的控制策略往往困难而且繁琐.因此有必要开展智能决策平台的研究, 用于测试、训练和优化不同的控制算法.
平台的搭建主要集中在四个方面:机器人本体建模、雪板/冰鞋与地面作用力建模、环境建模、智能算法研究.前面两者借助于前述以人类为对象的冰雪运动的研究基础, 着重对刚体模型的受力、速度、加速度等物理属性进行研究, 并在此基础上对关节开合、重心调整以及模型关联运动等行为属性进行进一步研究.环境建模主要落脚点在模拟冰雪环境的地理特征, 在考虑空气动力学因素的同时, 及时反馈与机器人本体的交互数据.智能算法可以考虑基于强化学习的机器人优化控制.
5.3.4 通用任务平台研究
冰雪机器人研究的初衷即为代替人类在极端环境下工作, 因此其发展目标一定是能够胜任多种任务.前述算法层面的研究, 仅仅保证了机器人个体在极端环境下的完整运行, 作为一款通用的任务平台至少还有以下困难需要克服:
1) 末端执行器控制.对于冰雪机器人, 环境常动态变化, 末端执行器的实时控制是一大难点.以Zhang等[109-110]提出的变参收敛微分神经网络(Varying para meter-convergent differential neural network, VP-CDNN)为例, 其不需要提前训练, 是一种实时解决方案, 并取得了较为前沿的表现效果.
2) 低温.目前普通机器人用的零部件工作范围多数为$-40$ ℃及以上, 然而冰雪机器人的工作环境往往下探到这一范围之下.开发适用极端环境并通过可靠性分析的部件是研究冰雪机器人不可缺少的一环.
3) 续航.低温环境下, 无论是电池还是内燃机, 其工作稳定性和效率都面临严峻考验.此外可靠的能量补给方式也是冰雪机器人长期稳定工作的基础.
4) 通信.极端环境一般罕有人类活动, 基础设施条件较差.以南极科考队为例, 目前使用的卫星通信仅在1 Mbps数量级, 仅能满足优先级非常高的数据传输, 并伴随秒级时延.考虑未来智能机器人的状态监控和实时控制将对通信的速度和质量提出非常高的要求, 研究新一代通信技术解决远距离通信难题是实现冰雪机器人走向实用化的基本保障.
6. 结束语
本文首先回顾了冰雪环境下的三种摩擦理论, 然后概述了冰雪运动中空气阻力的形成因素, 并从形阻、运动学因素和表面阻力三个方面探讨了减阻机制.接着按照运动学数据和动力学数据总结了冰雪运动生物力学中常见的测量手段.在此基础上, 介绍了数学建模的研究现状, 这一方面的研究较为丰富, 模型从一维到三维, 针对场景从滑雪到滑冰都有所涉猎.本文最后综述了冰雪机器人的研究现状, 并对其中的关键技术问题作了分析, 讨论了可能的研究方向.
多年以来, 以人为研究对象的冰雪运动生物力学在减阻测量和建模等方面积累了大量成果, 反观冰雪环境下的双足机器人研究一直处于一个相对空白状态, 与普通双足机器人快速发展形成鲜明对比.借助于冰雪运动生物力学的研究方法和既有结论, 可以深入探索类人机器人在高速、高机动状态下的环境感知、路径规划、运动控制等机理, 评估其稳定性、鲁棒性、泛化性, 这些都是普通类人机器人平台难以实现的.此外, 冰雪机器人的研究不仅促进冰雪运动的发展, 顺应了冰雪运动在我国正越来越受关注的趋势, 而且为极端冰雪条件下机器人的任务执行(如科学考察、军事作战等)提供基础理论与技术支撑, 助力极地强国建设.
-

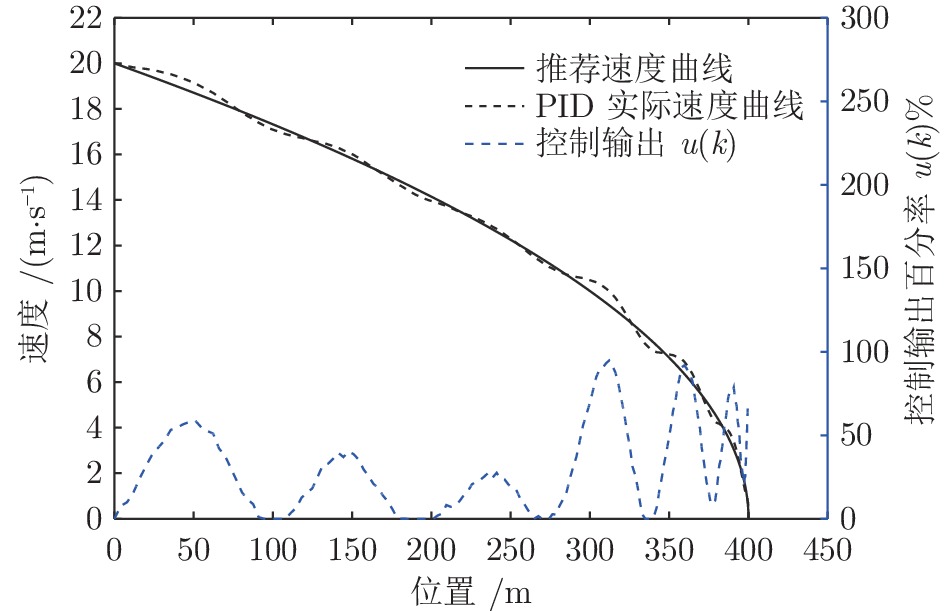
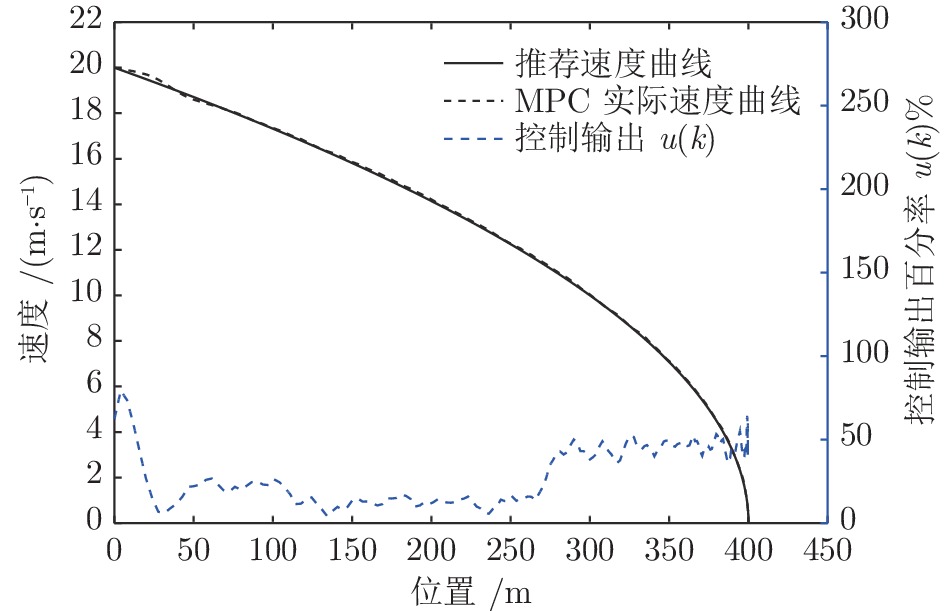
图 5 RMPC列车停车控制的速度−位置曲线 (
$ N = 5 $ )Fig. 5 RMPC speed-distance profile of train stopping (
$ N = 5 $ )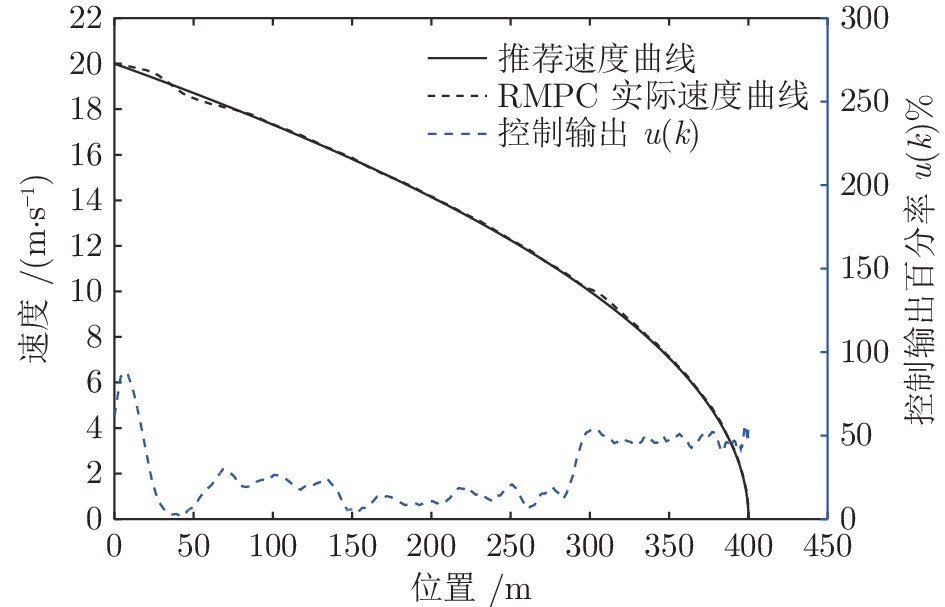
图 6 RMPC列车停车控制的速度−位置曲线 (
$ N = 10 $ )Fig. 6 RMPC speed-distance profile of train stopping (
$ N = 10 $ )
图 8 RSMPC列车停车控制的速度−位置曲线 (
$ N = 5 $ )Fig. 8 RSMPC speed-distance profile of train stopping (
$ N = 5 $ )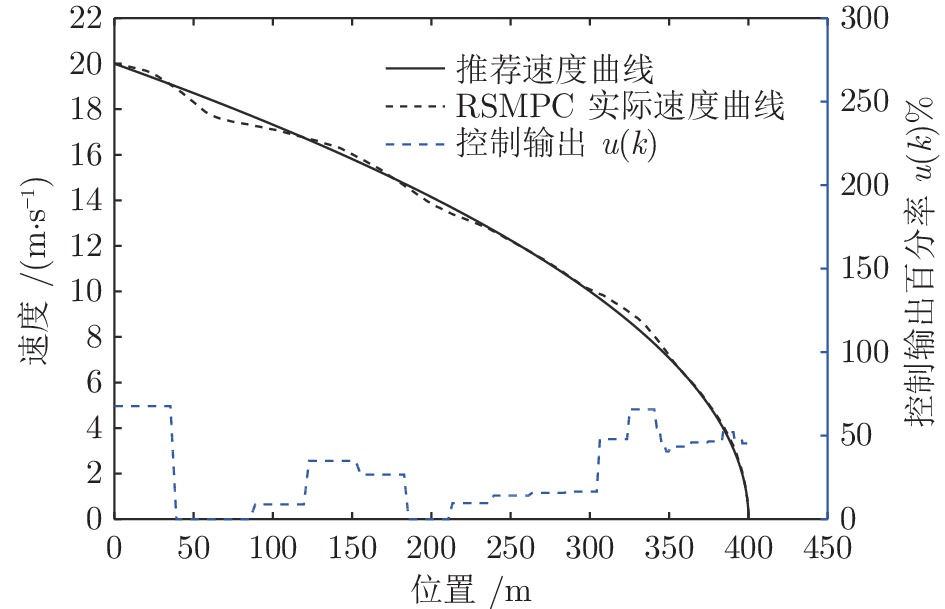
图 9 RSMPC列车停车控制的速度−位置曲线 (
$ N = 10 $ )Fig. 9 RSMPC speed-distance profile of train stopping (
$ N = 10 $ )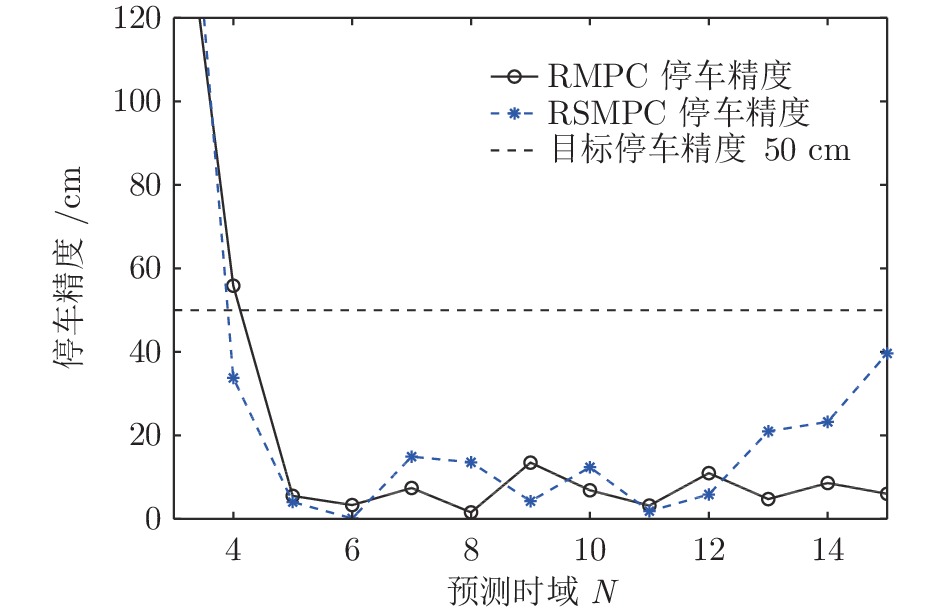
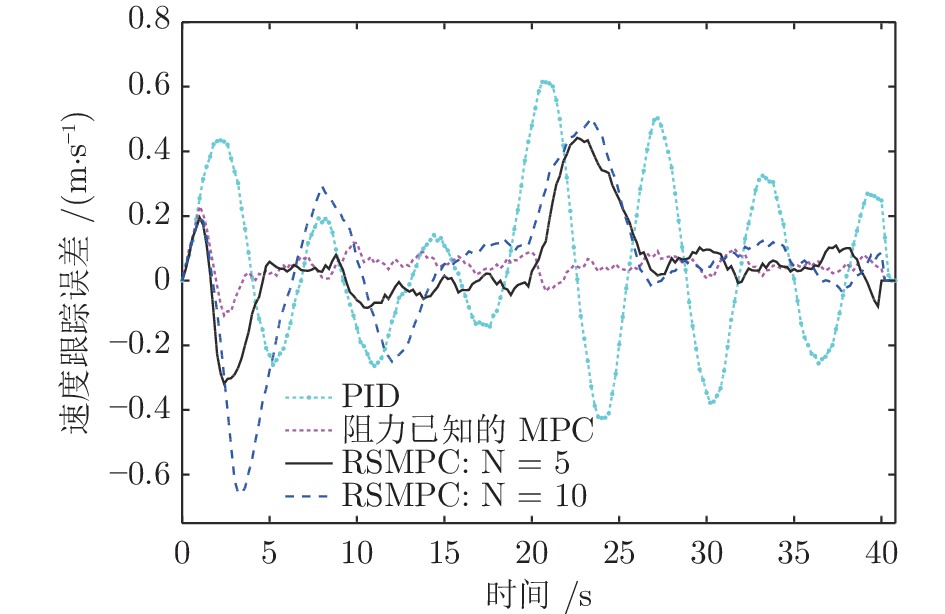
图 11 不同预测时域下RMPC和RSMPC的停车精度
Fig. 11 Stopping error of different prediction horizons with RMPC and RSMPC
表 1 仿真参数设置
Table 1 The simulation parameters
参数 取值 最大制动加速度 −1.07 m/s2 列车重量 490 t 基本阻力 5.4 + 0.0098 v + 0.00163 v2 采样间隔T 0.2 s 制动模型时延Td 1.0 s 制动模型时间常数$\tau$ 0.4 s 制动起始点速度 20 m/s 制动起始点位置 0 m 停车点位置 400 m 限速 20 m/s 参考制动加速度 −0.5 m/s2  下载: 导出CSV
下载: 导出CSV
-
[1] 宁滨, 董海荣, 郑伟, 荀径, 高士根, 王洪伟, 孟令云, 李浥东. 高速铁路运行控制与动态调度一体化的现状与展望. 自动化学报, 2019, 45(12): 2208-2217Ning Bin, Dong Hai-Rong, Zheng Wei, Xun Jing, Gao Shi-Gen, Wang Hong-Wei, Meng Ling-Yun, Li Yi-Dong. Integration of train control and online rescheduling for high-speed railways: challenges and future. Acta Automatica Sinica, 2019, 45(12): 2208-2217 [2] Dong H, Ning B, Cai B, Hou Z. Automatic train control system development and simulation for high-speed railways. IEEE Circuits and Systems Magazine, 2010, 10(2): 6-8 doi: 10.1109/MCAS.2010.936782 [3] Hou Z, Wang Y, Yin C, Tang T. Terminal iterative learning control based station stop control of a train. International Journal of Control, 2011, 84(7): 1263-1274 doi: 10.1080/00207179.2011.569030 [4] Jin S, Hou Z, Chi R. Optimal terminal iterative learning control for the automatic train stop system. Asian Journal of Control, 2015, 17(5): 1992-1999 doi: 10.1002/asjc.1065 [5] Guo G, Wang Q. Fuel-Efficient En Route Speed Planning and Tracking Control of Truck Platoons. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(8): 3091-3103 doi: 10.1109/TITS.2018.2872607 [6] Guo G, Li D. Adaptive Sliding Mode Control of Vehicular Platoons With Prescribed Tracking Performance. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7511-7520 doi: 10.1109/TVT.2019.2921816 [7] 佘守宪, 赵雁. 加加速度(加速度的时间变化率)——冲击、乘座舒适性、缓和曲线. 物理与工程, 2001, 11(3): 7-12, 22 doi: 10.3969/j.issn.1009-7104.2001.03.002She Shou-Xian, Zhao Yan. Jerk (the time rate of change of acceleration) - impact, passenger's comfortability, transition curve. Physics and Engineering, 2001, 11(3): 7-12, 22 doi: 10.3969/j.issn.1009-7104.2001.03.002 [8] Chen D, Chen R, Li Y, Tang T. Online learning algorithms for train automatic stop control using precise location data of balises. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(3): 1526-1535 doi: 10.1109/TITS.2013.2265171 [9] Yasunobu S, Miyamoto S, Ihara H. A fuzzy control for train automatic stop control. Transactions of the Society of Instrument and Control Engineers, 1983, 19(11): 873-880 doi: 10.9746/sicetr1965.19.873 [10] Yasunobu S, Murai Y. Predictive fuzzy control and parking control. In: Proceedings of 1995 American Control Conference. Washington, USA: IEEE, 1995. 2277−2281 [11] Chen D, Gao C. Soft computing methods applied to train station parking in urban rail transit. Applied Soft Computing, 2012, 12(2): 759-767 doi: 10.1016/j.asoc.2011.10.016 [12] 于振宇, 陈德旺. 城轨列车制动模型及参数辨识. 铁道学报, 2011, 33(10): 37-40 doi: 10.3969/j.issn.1001-8360.2011.10.007Yu Zhen-Yu, Chen De-Wang. Modeling and system identification of the braking system of urban rail vehicles. Journal of the China Railway Society, 2011, 33(10): 37-40 doi: 10.3969/j.issn.1001-8360.2011.10.007 [13] Wu P, Wang Q. Research of the automatic train stop control based on adaptive generalized predictive control. In: Proceedings of the 33rd Chinese Control Conference. Nanjing, China: IEEE, 2014. 3399-3404 [14] 罗仁士, 王义惠, 于振宇, 唐涛. 城轨列车自适应精确停车控制算法研究. 铁道学报, 2012, 30(4): 64-68 doi: 10.3969/j.issn.1001-8360.2012.04.011Luo Ren-Shi, Wang Yi-Hui, Yu Zhen-Yu, Tang Tao. Adaptive stopping control of urban rail vehicle, Journal of the China Railway Society. 2012, 30(4): 64-68 doi: 10.3969/j.issn.1001-8360.2012.04.011 [15] 王青元, 吴鹏, 冯晓云, 张彦栋. 基于自适应终端滑模控制的城轨列车精确停车算法. 铁道学报, 2016, 38(2): 56-63 doi: 10.3969/j.issn.1001-8360.2016.02.008Wang Qing-Yuan, Wu Peng, Feng Xiao-Yun, Zhang Yan-Dong, Precise automatic train stop control algoritm based on adaptive terminal sliding mode control. Journal of the China Railway Society, 2016, 38(2): 56-63 doi: 10.3969/j.issn.1001-8360.2016.02.008 [16] Qin S J, Badgwell T A. A survey of industrial model predictive control technology. Control Engineering Practice, 2003, 11(7): 733-764 doi: 10.1016/S0967-0661(02)00186-7 [17] 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战. 自动化学报, 2013, 39(3): 222-236 doi: 10.1016/S1874-1029(13)60024-5Xi Yu-Geng, Li De-Wei, Lin Shu. Model Predictive Control - Status and Challenges. Acta Automatica Sinica, 2013, 39(3): 222-236 doi: 10.1016/S1874-1029(13)60024-5 [18] Wang X, Tang T. Optimal operation of high-speed train based on fuzzy model predictive control. Advances in Mechanical Engineering, 2017, 9(3): 1-14 [19] 汪仁智, 李德伟, 席裕庚. 采用预测控制的地铁节能优化控制算法. 控制理论与应用, 2017, 34(9): 1129-1135 doi: 10.7641/CTA.2017.60861Wang Ren-Zhi, Li De-Wei, Xi Yu-Geng. Metro energy saving optimization algorithm by using model predictive control. Control Theory & Applications, 2017, 34(9): 1129-1135 doi: 10.7641/CTA.2017.60861 [20] Farooqi H, Fagiano L, Colaneri P, Barlini D. Shrinking horizon parametrized predictive control with application to energy-efficient train operation. Automatica, 2020, 112(2020), 108635 [21] Liu X, Xun J, Ning B, Yuan L. An approach for accurate stopping of high-speed train by using model predictive control. In: Proceedings of 2019 IEEE Intelligent Transportation Systems Conference. Auckland, NZ: IEEE, 2019. 846−851 [22] Mayne D Q, Rawlings J B, Rao C V, Scokaert P O. Constrained model predictive control: Stability and optimality. Automatica, 2000, 36(6): 789-814 doi: 10.1016/S0005-1098(99)00214-9 [23] 席裕庚. 预测控制 (第2版). 北京: 国防工业出版社, 2013Xi Yu-Geng. Predictive control, 2nd ed. Beijing: Nationnal Defence Industry Press, 2013 [24] 陈虹. 模型预测控制. 北京: 科学出版社, 2013Chen Hong. Model Predictive control. Beijing: Science Press, 2013 [25] Chisci L, Rossiter J A, Zappa G. Systems with persistent disturbances: predictive control with restricted constraints. Automatica, 2001, 37(7): 1019-1028 doi: 10.1016/S0005-1098(01)00051-6 [26] Mayne D Q, Seron M M, Rakovi S V. Robust model predictive control of constrained linear systems with bounded disturbances. Automatica, 2005, 41(2): 219-224 doi: 10.1016/j.automatica.2004.08.019 [27] Velasco M, Fuertes J, Marti P. The self triggered task model for real-time control systems. In: Proceedings of the 24th IEEE Real-Time Systems Symposium. Washington, USA: IEEE, 1995. 67-70 [28] Berglind J B, Gommans T M P, Heemels W P M H. Self-triggered MPC for constrained linear systems and quadratic costs. IFAC Proceedings Volumes, 2012, 45(17): 342-348 doi: 10.3182/20120823-5-NL-3013.00058 [29] Xun J, Yin J, Liu R, Liu F, Zhou Y, Tang T. Cooperative control of high-speed trains for headway regulation: A self-triggered model predictive control based approach. Transportation Research Part C: Emerging Technologies, 2019, 102(2019): 106-120 [30] Brunner F D, Heemels W P M H, Allgower F. Robust self-triggered MPC for constrained linear systems. In: Proceedings of 2014 European Control Conference. Strasbourg, FR: IEEE, 2014. 472−477 [31] Aydiner E, Brunner F D, Heemels W P M H, Allgower F. Robust self-triggered model predictive control for discrete-time linear systems based on homothetic tubes. In: Proceedings of 2015 European Control Conference. Linz, AT: IEEE, 2015. 1587−1593 [32] Brunner F D, Heemels W P M H, Allgower F. Robust self-triggered MPC for constrained linear systems: A tube-based approach. Automatica, 2016, 72(2016): 73-83 [33] Yin J, Tang T, Yang L, Xun J, Huang Y, Gao Z. Research and development of automatic train operation for railway transportation systems: A survey. Transportation Research Part C: Emerging Technologies, 2017, 85(2017): 548-572 [34] 王呈, 陈晶, 荀径, 李开成. 基于混合滤波最大期望算法的高速列车建模. 自动化学报, 2019, 45(12): 2260-2267Wang Cheng, Chen Jing, Xun Jing, Li Kai-Cheng. Hybrid filter based expectation maximization algorithm for high-speed train modeling. Acta Automatica Sinica, 2019, 45(12): 2260-2267 [35] 谢国, 金永泽, 黑新宏, 姬文江, 高士根, 高桥圣, 望月宽. 列车动力学模型时变环境参数自适应辨识. 自动化学报, 2019, 45(12): 2268-2280Xie Guo, Jin Yong-Ze, Hei Xin-Hong, Ji Wen-Jiang, Gao Shi-Gen, Takahashi Sei, Mochizuki Hiroshi. Adaptive identification of time-varying environmental parameters in train dynamics model. Acta Automatica Sinica, 2019, 45(12): 2268-2280 [36] Davis W J. The tractive resistance of electric locomotives and cars. General Electr. Rev., 1926, 29(10): 685-708 [37] Liu X, Ning B, Xun J, Wang C, Xiao X, Liu T. Parameter identification of train basic resistance using multi-innovation theory. IFAC-PapersOnLine, 2018, 51(18): 637-642 doi: 10.1016/j.ifacol.2018.09.352 [38] Rakovic S V, Kerrigan E C, Kouramas K I, Mayne D Q. Invariant approximations of the minimal robust positively invariant set. IEEE Transactions on Automatic Control, 2005, 50(3): 406-410 doi: 10.1109/TAC.2005.843854 [39] Kolmanovsky I, Gilbert E G. Maximal output admissible sets for discrete-time systems with disturbance inputs. In: Proceedings of 1995 American Control Conference. Seattle, US: IEEE, 1995. 1995−1999 [40] Chen H, Allgower F. A quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability. Automatica, 1998, 34(10): 1205-1217 doi: 10.1016/S0005-1098(98)00073-9 -

 下载:
下载:











计量
- 文章访问数: 1928
- HTML全文浏览量: 320
- PDF下载量: 356
- 被引次数: 0
