

Efficient Formation of Flapping-wing Aerial Vehicles Based on Wild Geese Queue Effect
-
摘要: 本文借鉴“雁阵效应”, 研究了扑翼飞行机器人高效集群编队飞行问题. 通过对“V”字雁阵的分析得知, 当前排大雁(简称头雁)和后排大雁(简称从雁)保持某一合适的相对位置偏移时, 后排大雁可有效利用前排大雁挥翅产生的上洗涡流, 从而节省体能; 并且, 雁阵通过阵型的变换, 可以实现能量整体消耗的均衡性, 确保长航时飞行. 仿照该“雁阵效应”, 分析得出耗能最少的扑翼飞行机器人集群阵型排布方式, 并设计了阵型变换机制, 实现集群能量整体消耗的最优性和均衡性. 在此基础上, 参考雁群的交互方式, 设计了一种使用局部信息的控制方法, 保证最优阵型的稳定维持以及阵型间的灵活变换. 最后, 仿真结果验证了所提理论结果的有效性.Abstract: Based on the wild geese queue effect, this paper studies the efficient formation issue of flapping-wing aerial vehicles. By analyzing the formation manner with configuration “V”, it is shown that the rear wild geese can effectively save energy with the aid of the upwash airflow generated by the flutter of the front wild geese, when they maintain proper position offsets. Moreover, the uniform consumption of energy of the overall cluster can be maintained by reasonable configuration transformation such that the long-endurance formation is warranted. Borrowing from the intuition of the wild geese queue effect, we formulate a well-specified configuration of flapping-wing aerial vehicles with the least energy consumption, and design a mechanism of configuration transformation, which guarantees the optimization and uniformity of the overall energy consumption. In addition, referring to the interaction manner of the wild geese, we propose a control approach using local information such that the stable maintenance of the optimal configuration and the flexible transformation between distinct configurations are ensured. Finally, the simulation results verify the effectiveness of the proposed main results.
-
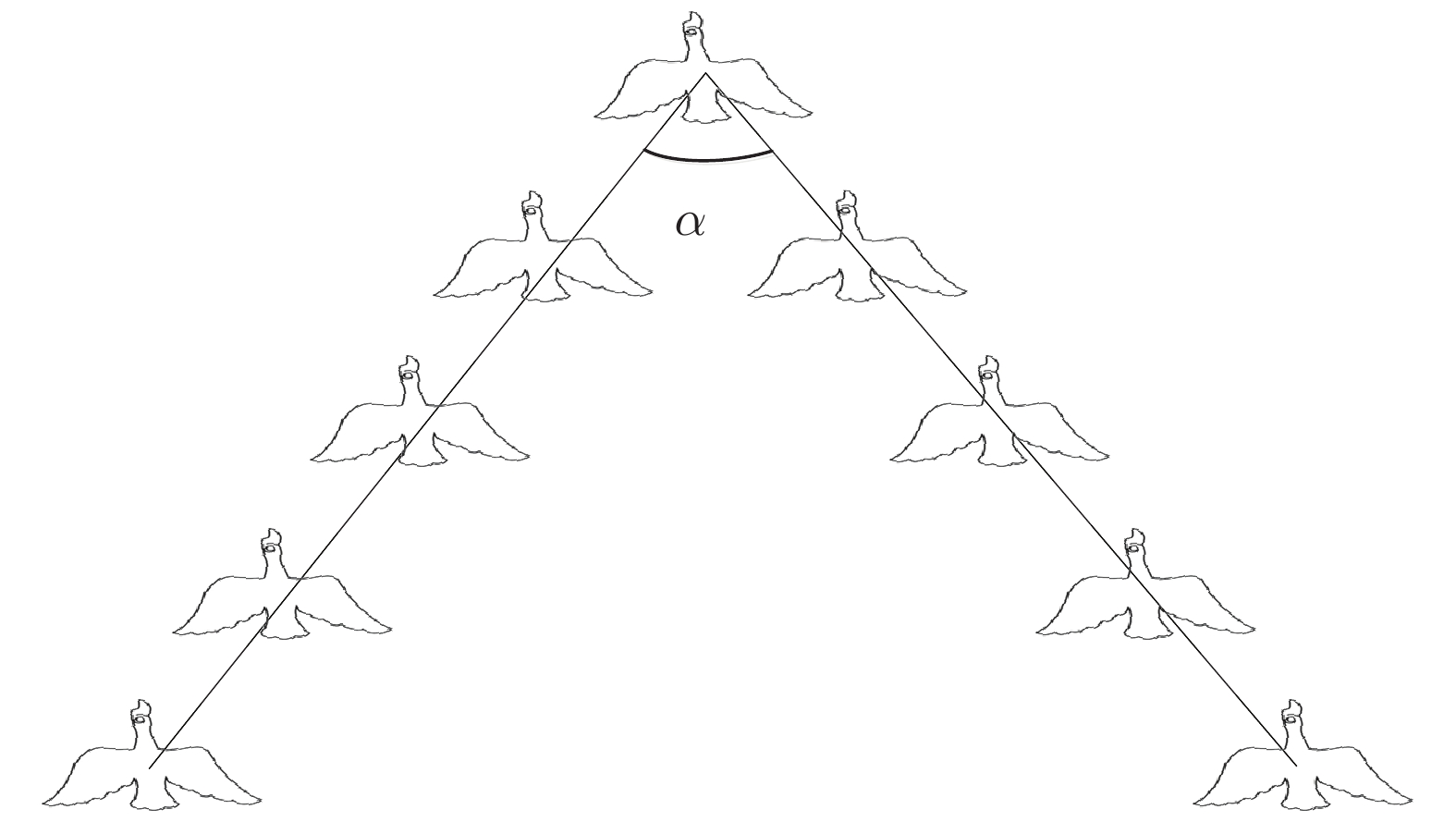
图 1 锐角“V” 字阵型示意图(
$\alpha < 90^{\circ}$ )Fig. 1 “V” configuration with an acute angle (
$\alpha < 90^{\circ}$ )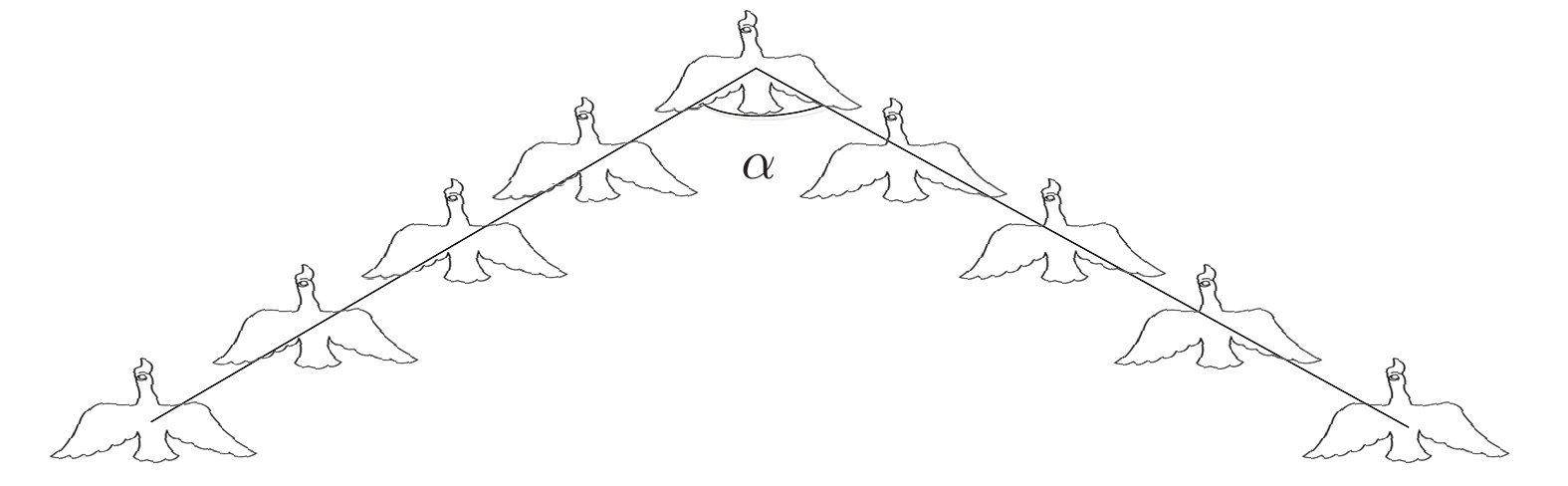
图 2 钝角“V” 字阵型示意图(
$\alpha > 90^{\circ}$ )Fig. 2 “V” configuration with an obtuse angle (
$\alpha > 90^{\circ}$ )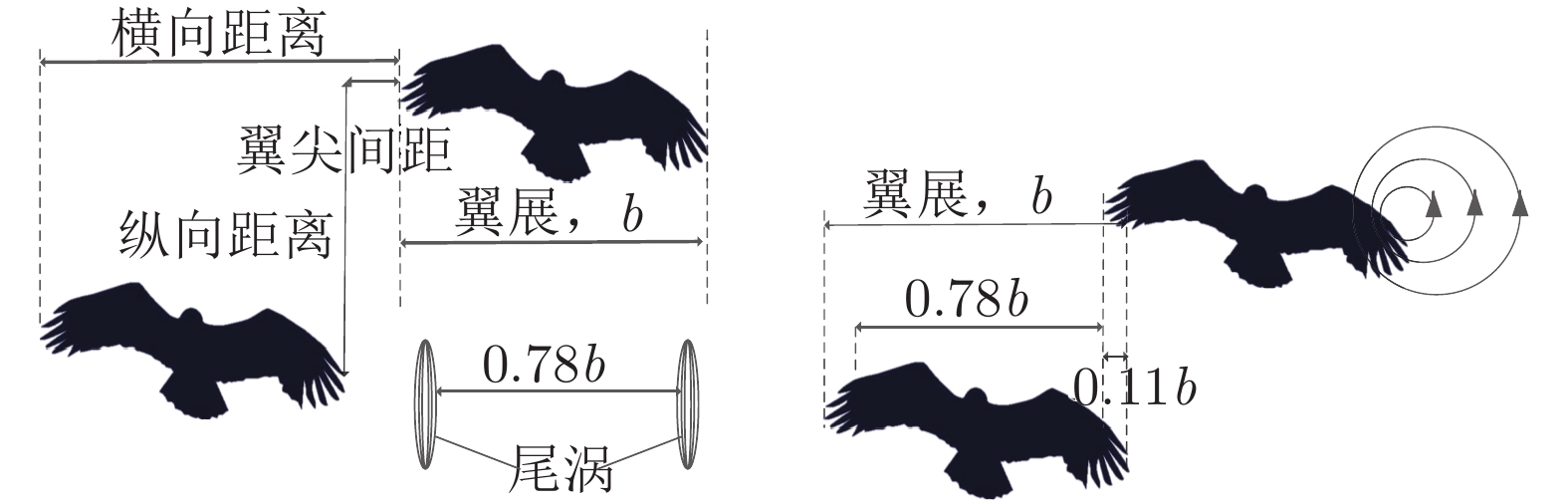
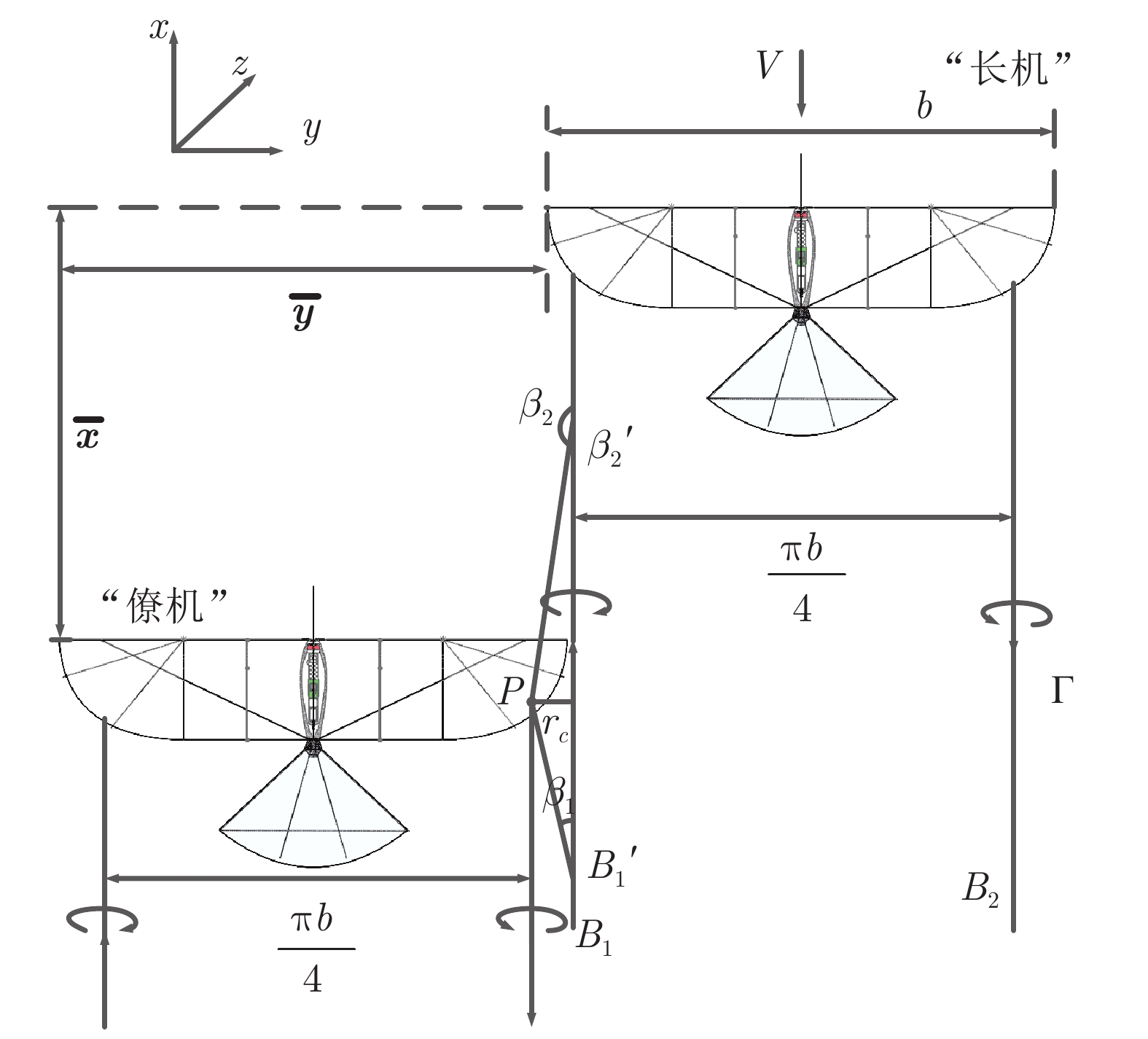
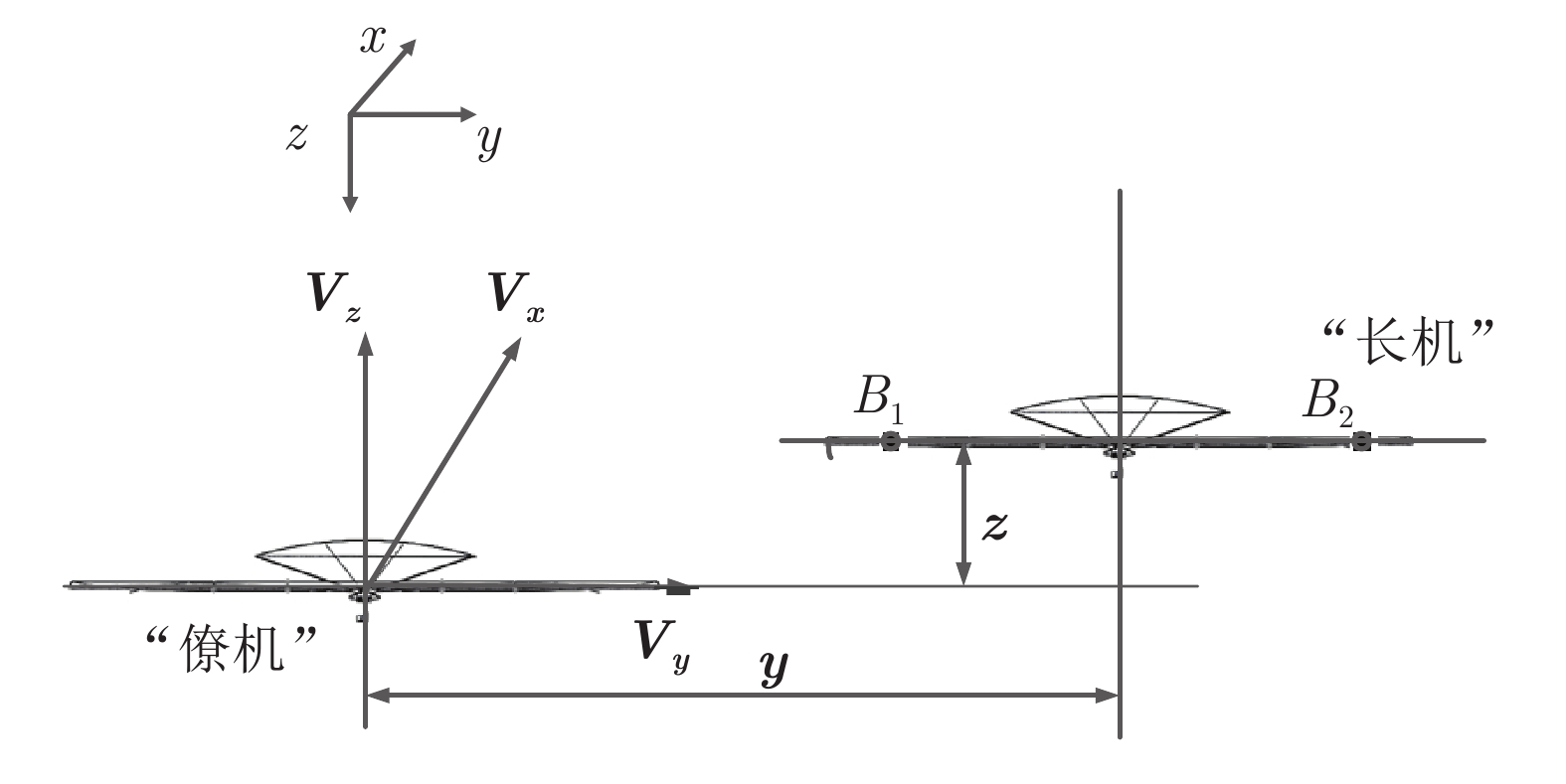
图 3 雁间距及翼尖涡流示意图
Fig. 3 The schematic diagrams of spacing between wild goose and vortex formed by wingtip
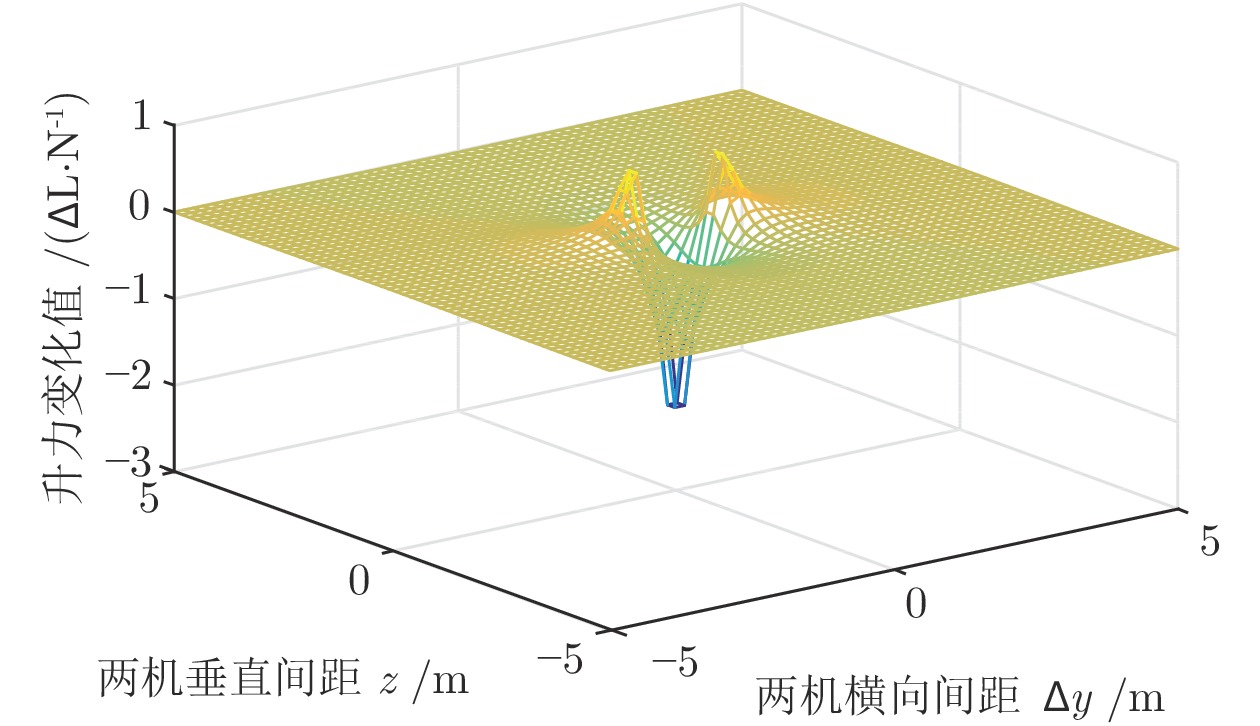
图 7 两机纵向间距为2b时升力变化关于横向间距、垂向间距3维曲线图
Fig. 7 3D curve of lift variation with respect to lateral and vertical distances with longitudinal distance 2b
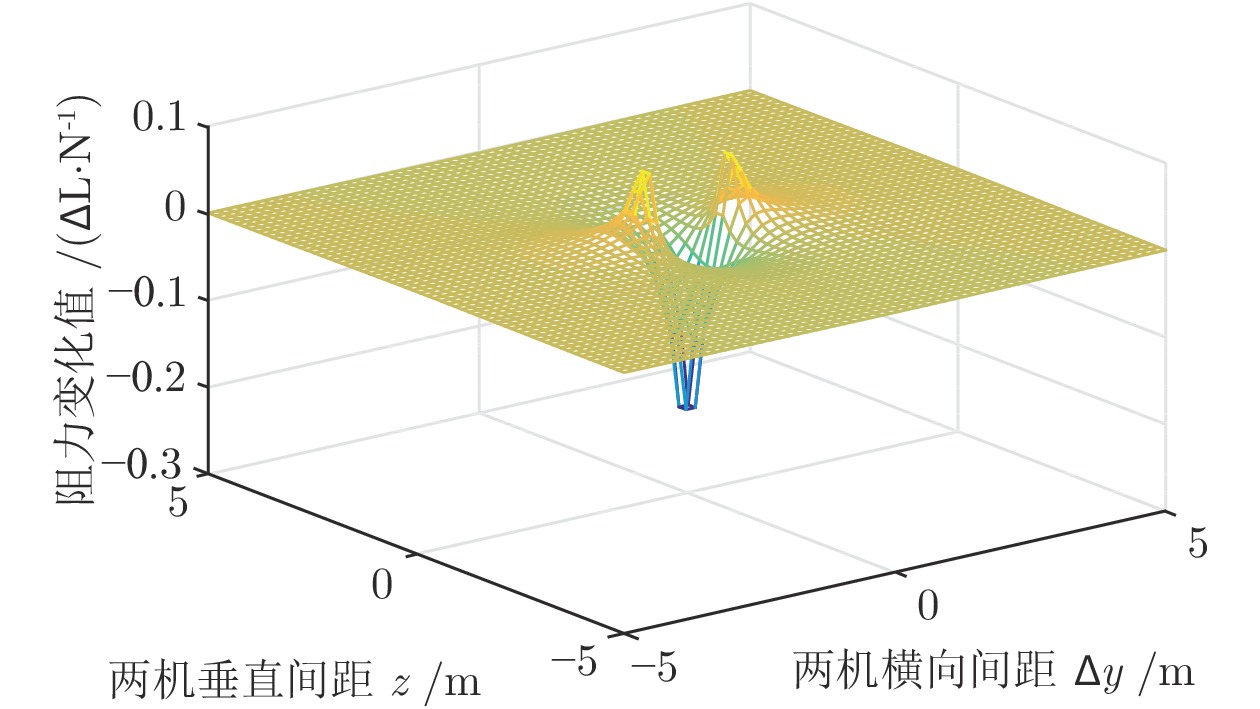
图 8 两机纵向间距为2b时阻力变化关于横向间距、垂向间距3维曲线图
Fig. 8 3D curve of drag variation with respect to lateral and vertical distances with longitudinal distance 2b
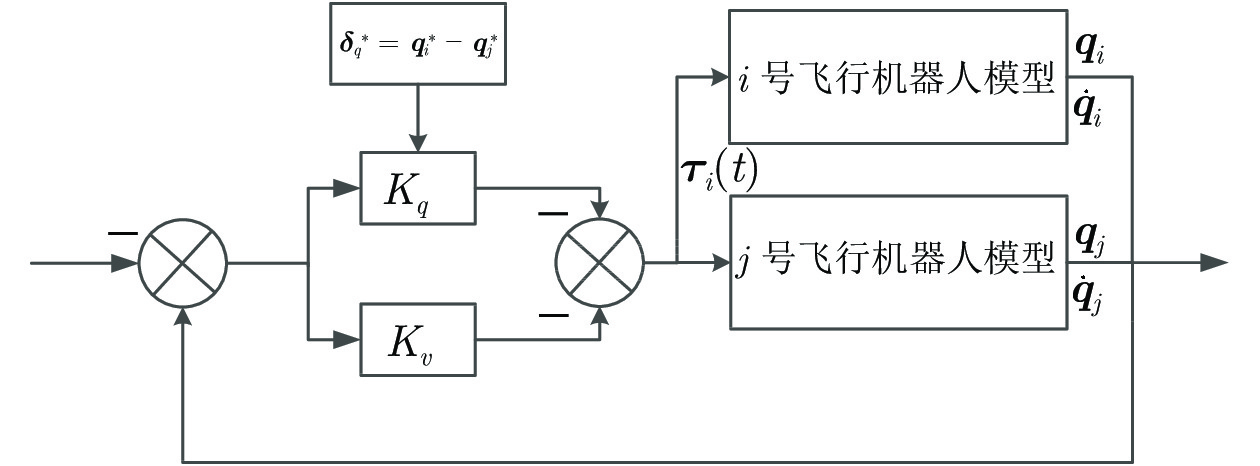
图 11 扑翼飞行机器人集群编队控制框图
Fig. 11 Formation control block diagram of flapping-wing aerial vehicles

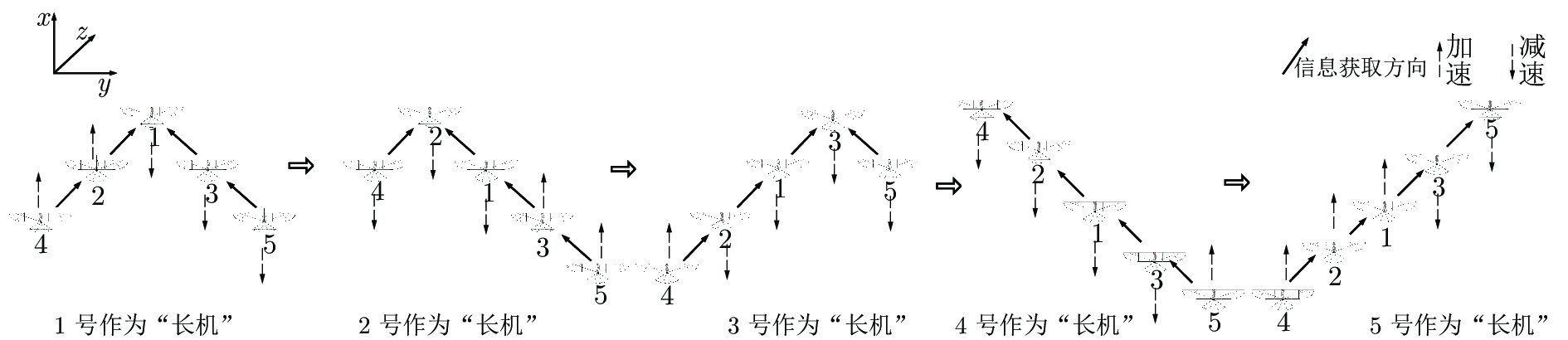
图 12 扑翼飞行机器人集群编队飞行及阵型变换三维图
Fig. 12 3D formation snapshot of flapping-wing aerial vehicles
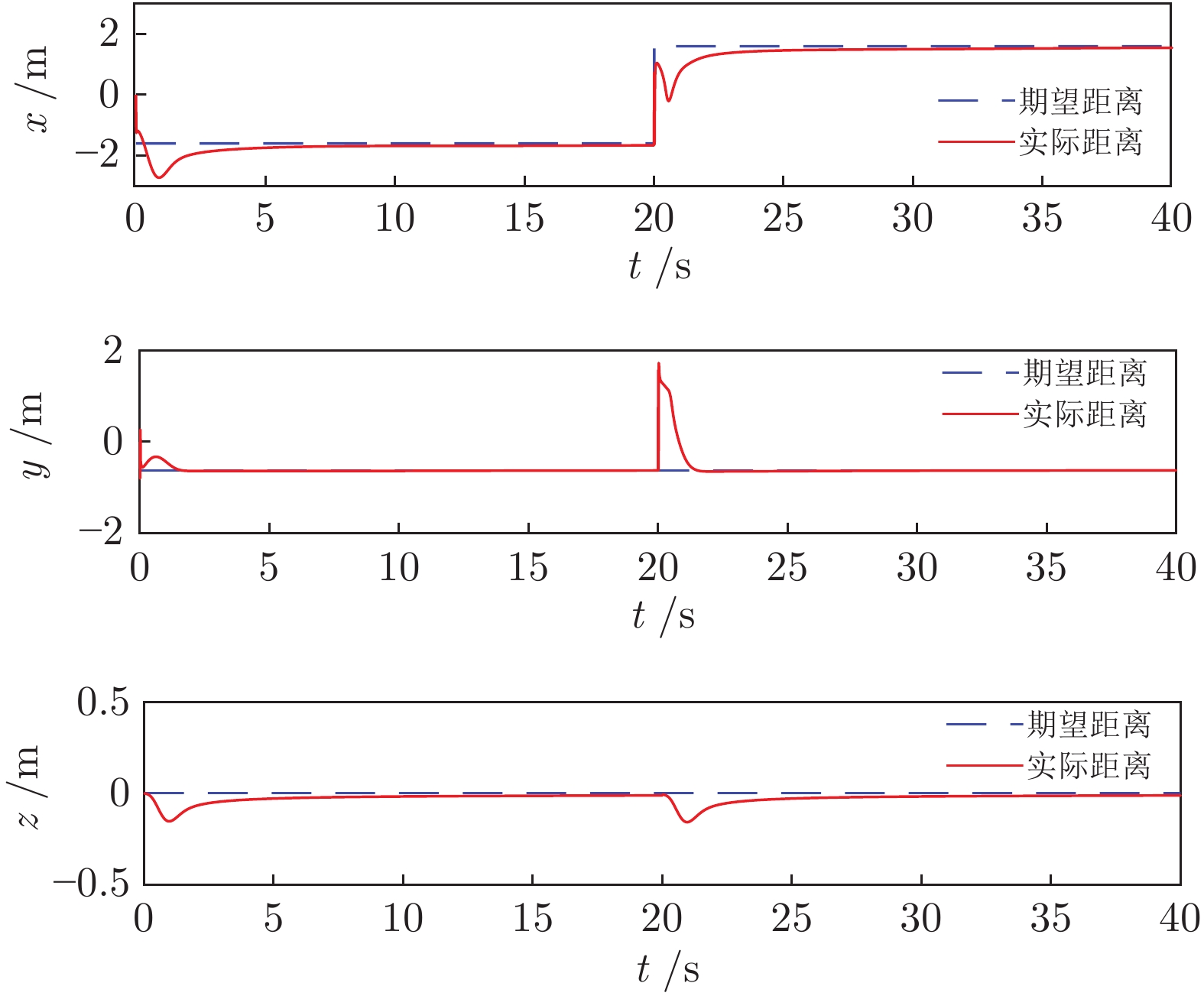
图 13 1号和2号扑翼飞行机器人相对位置分量
Fig. 13 Relative position components between flapping-wing aerial vehicles 1 and 2
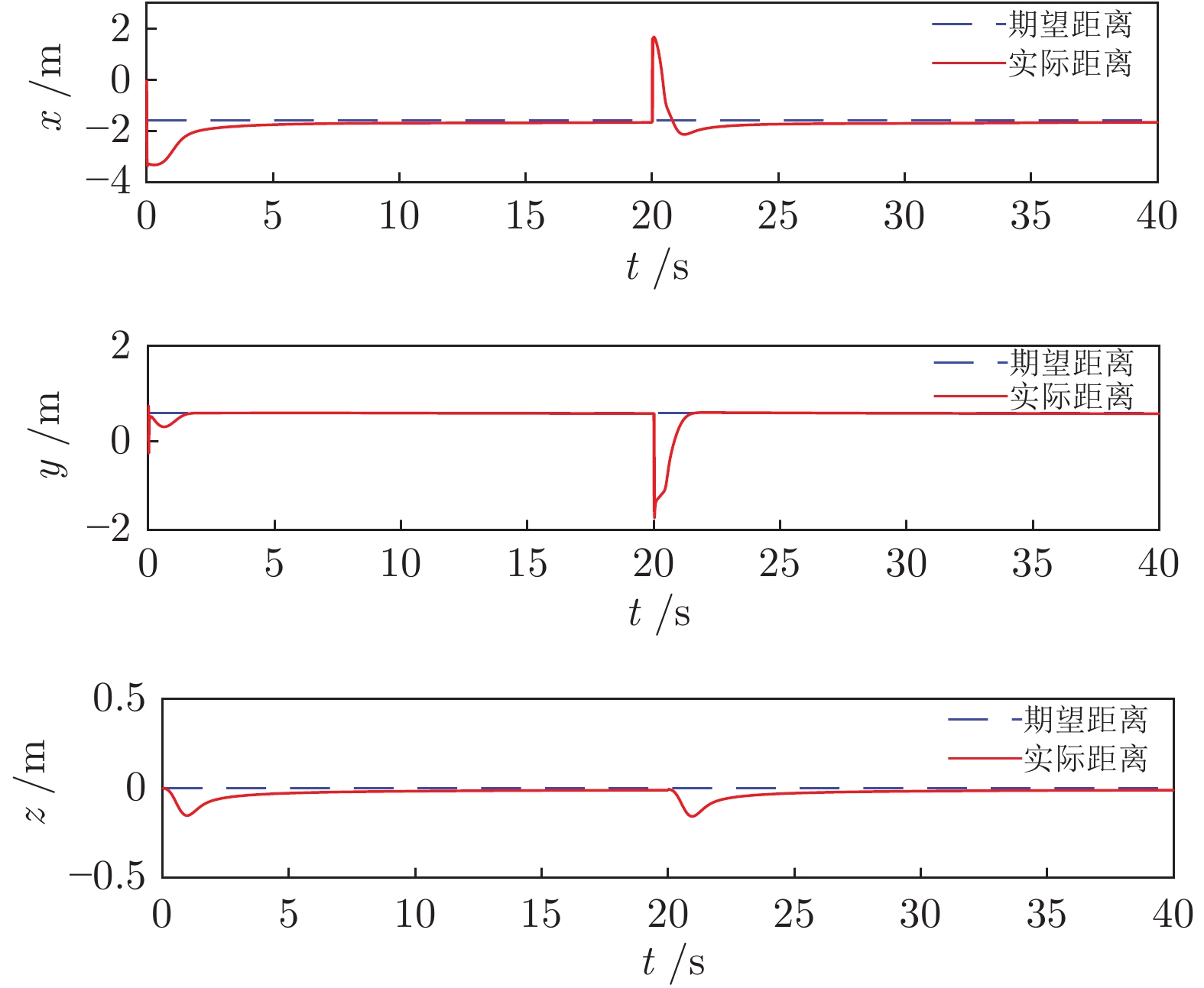
图 14 1号和3号扑翼飞行机器人相对位置分量
Fig. 14 Relative position components between flapping-wing aerial vehicles 1 and 3
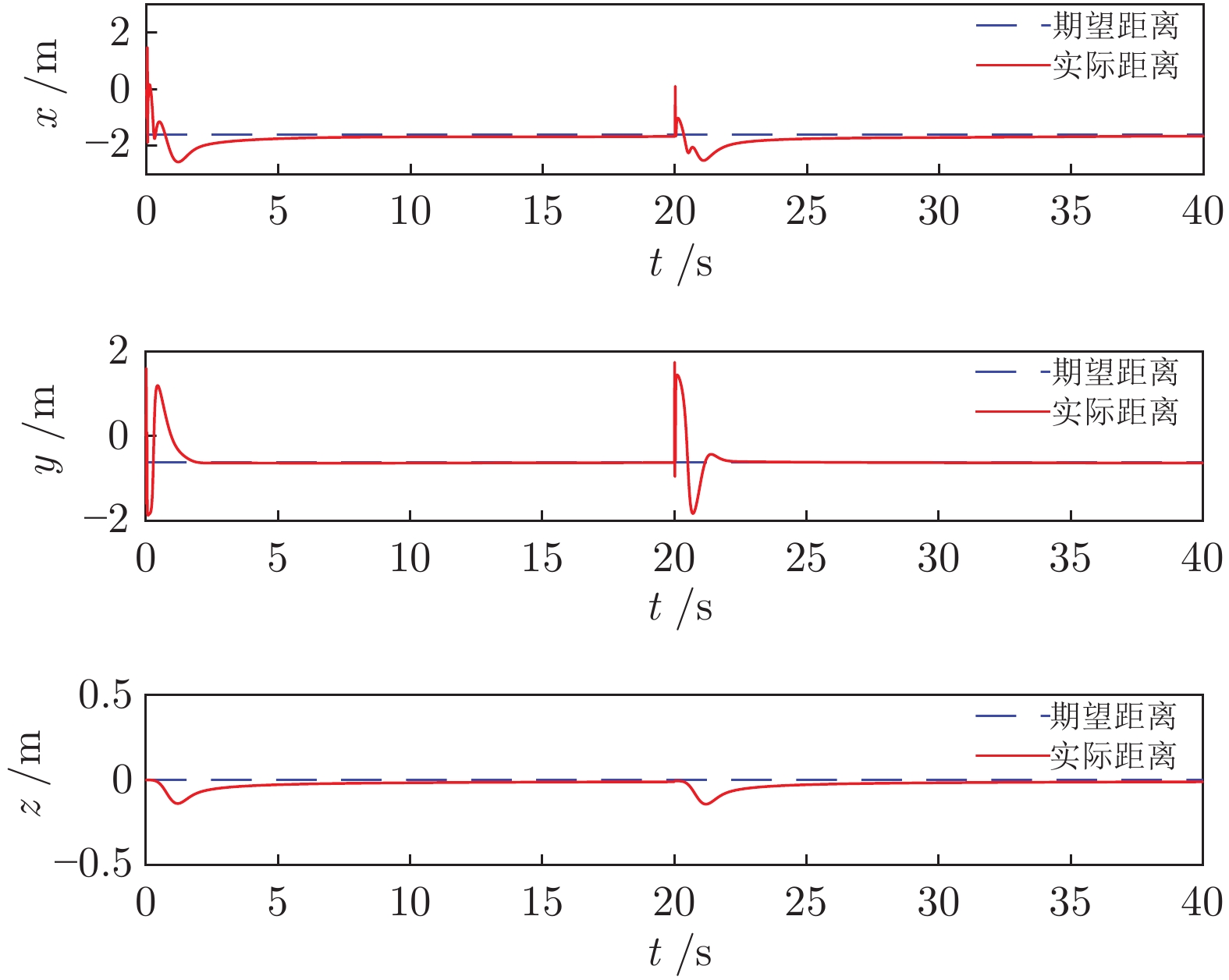
图 15 2号和4号扑翼飞行机器人相对位置分量
Fig. 15 Relative position components between flapping-wing aerial vehicles 2 and 4
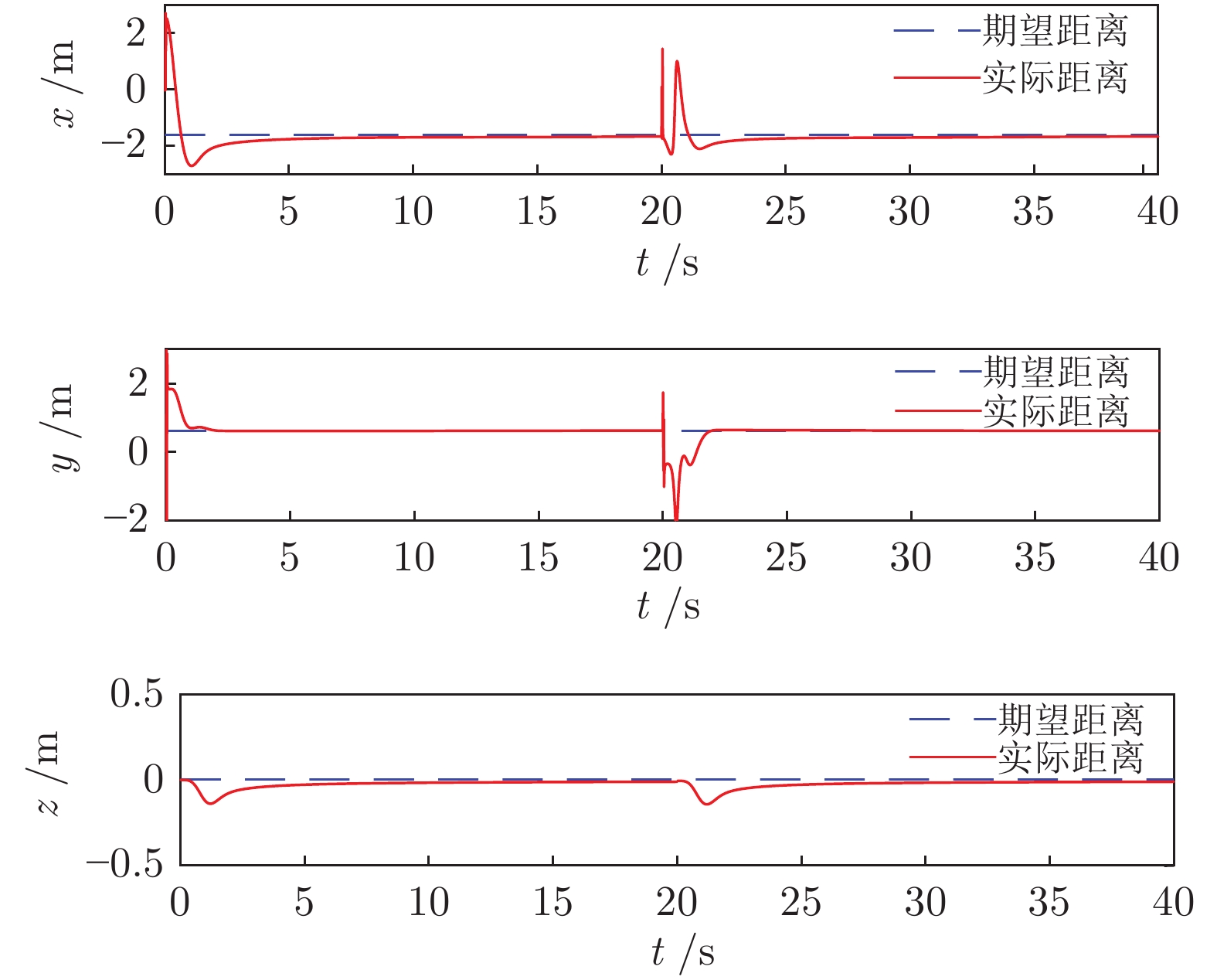
图 16 3号和5号扑翼飞行机器人相对位置分量
Fig. 16 Relative position components between flapping-wing aerial vehicles 3 and 5

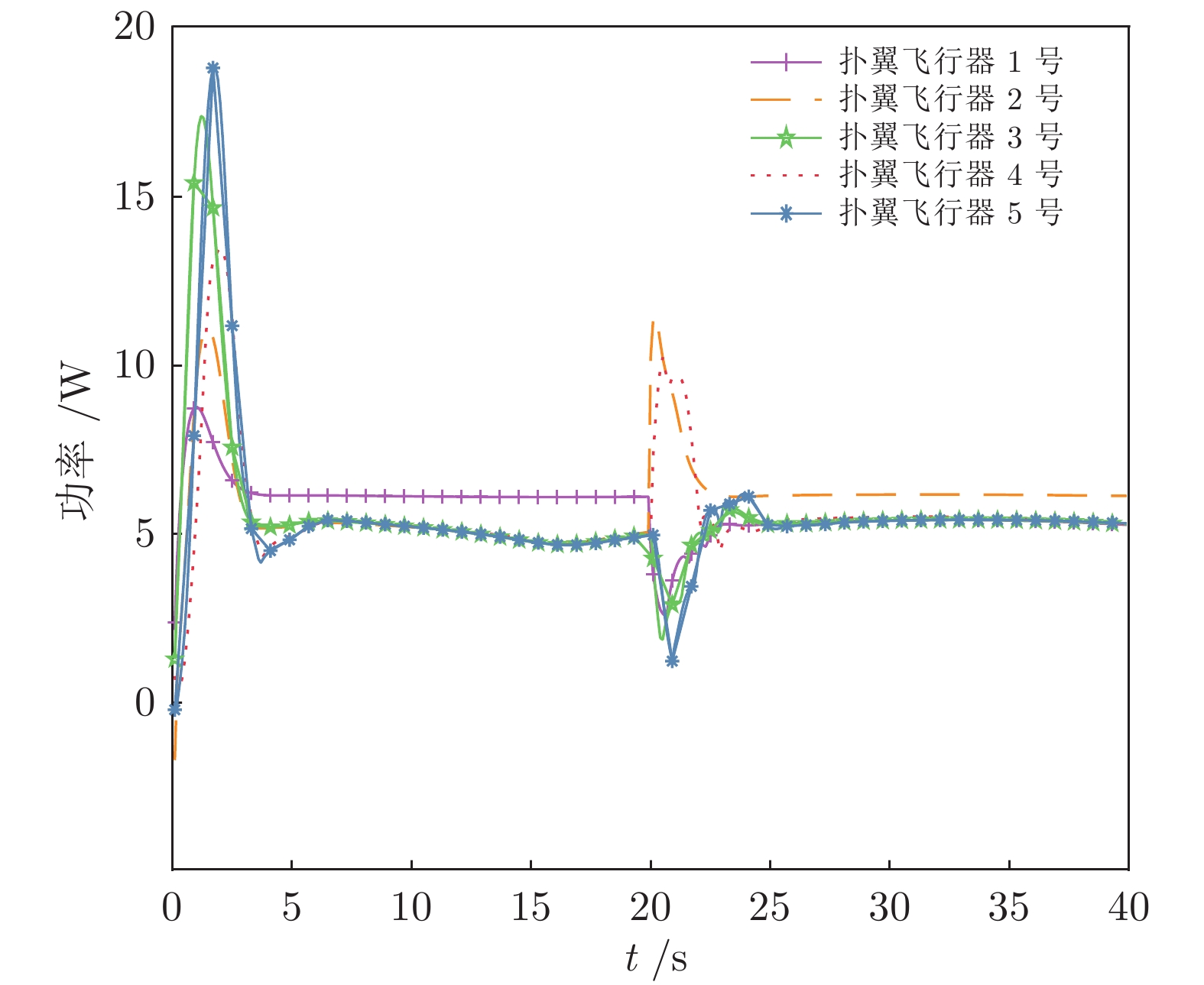
图 20 2号扑翼飞行机器人基于不同的编队阵型下的飞行功率消耗曲线
Fig. 20 Power of flapping-wing aerial vehicles 2 in different formations
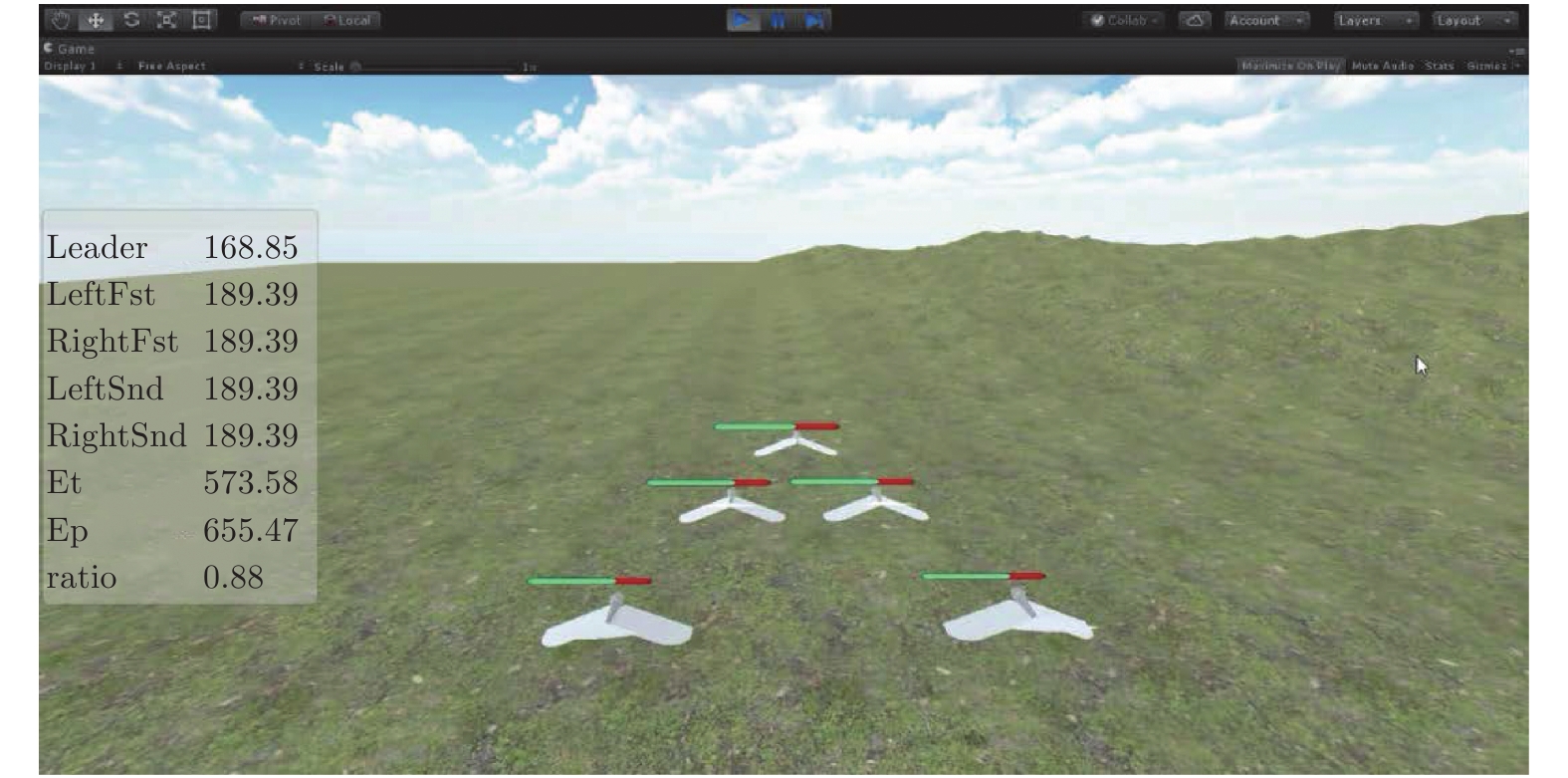
图 21 扑翼飞行机器人集群编队飞行三维虚拟仿真实验图
Fig. 21 3D virtual simulation snapshot for formation of flapping-wing aerial vehicles
表 1 扑翼飞行机器人基本参数
Table 1 Parameters of flapping-wing aerial vehicles
名称 符号 参数 单位 机翼翼面面积 S 0.175 m2 翼展 b 0.8 m 展弦比 AR 3.66 — 飞机质量 m 0.1 kg 机翼升力曲线斜率 aW 8.2 rad−1 升力系数 CL 1.0 — 动压 q 16.125 kg/m2  下载: 导出CSV
下载: 导出CSV
表 2 扑翼飞行机器人仿真参数
Table 2 Simulation parameters of flapping-wing aerial vehicles
扑翼机编号 x (m) y (m) z (m) v (m/s) γ (°) 扑翼机 1 号 0 0 2 1 0 扑翼机 2 号 −0.8 −2 2 3 10 扑翼机 3 号 0.8 −4 2 3 −10 扑翼机 4 号 −1.6 −3 2 3 20 扑翼机 5 号 1.6 −4 2 2 −20
下载: 导出CSV
-
[1] Bialek W, Cavagna A, Giardina I, et al. Social interactions dominate speed control in poising natural flocks near criticality. Proceedings of the National Academy of Sciences, 2014, 111(20): 7212−7217 doi: 10.1073/pnas.1324045111 [2] 贺威, 丁施强, 孙长银. 扑翼飞行器的建模与控制研究进展. 自动化学报, 2017, 43(5): 685−696He Wei, Ding Shi-Qiang, Sun Chang-Yin. Research progress on modeling and control of flapping-wing air vehicles. Acta Automatica Sinica, 2017, 43(5): 685−696 [3] Ramezani A, Chung S, Hutchinson S. A biomimetic robotic platform to study flight specializations of bats. Science Robotics, 2017, 2(3): eaal2505 doi: 10.1126/scirobotics.aal2505 [4] He W, Huang H, Chen Y, et al. Development of an autonomous flapping-wing aerial vehicle. Science China Information Science, 2017, 60(6): 063201 doi: 10.1007/s11432-017-9077-1 [5] Chen Y, Wang H, Wu L, Helbling E F, et al. A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot. Science Robotics, 2017, 2(11): eaao5619 doi: 10.1126/scirobotics.aao5619 [6] Yu D, Chen CL P. Automatic leader-follower persistent formation generation with minimum agent-movement in various switching topologies. IEEE Transactions on Cybernetics, 2019, 50(4): 1569−1581 [7] Pachter M, D' Azzo J, Proud A, et al. Tight formation flight control. Journal of Guidance, Control, and Dynamics, 2001, 24(2): 246−254 doi: 10.2514/2.4735 [8] Qiu H, Duan H. Receding horizon control for multiple UAV formation flight based on modified brain storm optimization. Nonlinear Dynamics, 2014, 78(3): 1973−1988 doi: 10.1007/s11071-014-1579-7 [9] 杨之元, 段海滨, 范彦铭. 基于莱维飞行鸽群优化的仿雁群无人机编队控制器设计. 中国科学: 技术科学, 2018, 42(2): 161−169Yang Zhi-Yuan, Duan Hai-Bin, Fan Yan-Ming. Unmanned aerial vehicle formation controller design via the behavior mechanism in wild geese based on Levy flight pigeon-inspired optimization. Science Sinica Technologica, 2018, 42(2): 161−169 [10] 周子为, 段海滨, 范彦铭. 仿雁群行为机制的多无人机紧密编队. 中国科学: 技术科学, 2017, 47(3): 230−238 doi: 10.1360/N006-00138Zhou Zi-Yuan, Duan Hai-Bin, Fan Yan-Ming. Unmanned aerial vehicle close formation control based on the behavior mechanism in wild geese. Science Sinica Technologica, 2017, 47(3): 230−238 doi: 10.1360/N006-00138 [11] Weimerskirch H, Martin J, Clerquin Y, et al. Energy saving in flight formation. Nature, 2001, 413: 697−698 doi: 10.1038/35099670 [12] 邓婉, 王新民, 王晓燕, 肖亚辉. 无人机编队队形保持变换控制器设计. 计算机仿真, 2011, 28(10): 73−77 doi: 10.3969/j.issn.1006-9348.2011.10.018Deng Wan, Wang Xin-Min, Wang Xiao-Yan, Xiao Ya-Hui. Controller design of UAVs formation keep and change. Computer Integrated Manufacturing Systems, 2011, 28(10): 73−77 doi: 10.3969/j.issn.1006-9348.2011.10.018 [13] Ren W, Beard R. Decentralized scheme for spacecraft formation flying via the virtual structure approach. Journal of Guidance, Control, and Dynamics, 2004, 27(1): 73−82 doi: 10.2514/1.9287 [14] Berger J, Lo N. An innovative multi-agent search-and-rescue path planning approach. Computers & Operations Research, 2015, 53: 24−31 [15] Nageli T, Conte C, Domahidi A, et al. Environment-independent formation flight for micro aerial vehicles. 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014: 1141−1146 [16] Lu K, Xia Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica, 2013, 49(12): 3591−3599 doi: 10.1016/j.automatica.2013.09.001 [17] Meng Z, Dimarogonas D, Johansson K. Leader-follower coordinated tracking of multiple heterogeneous Lagrange systems using continuous control. IEEE Transactions on Robotics, 2013, 30(3): 739−745 [18] Saska M, Baca T, Thomas J, Chudoba J, et al. System for deployment of groups of unmanned micro aerial vehicles in GPS-denied environments using onboard visual relative localization. Autonomous Robots, 2017, 41(4): 919−944 doi: 10.1007/s10514-016-9567-z [19] Shorakaei H, Vahdani M, Imani B, Gholami A. Optimal cooperative path planning of unmanned aerial vehicles by a parallel genetic algorithm. Robotica, 2016, 34(4): 823−836 doi: 10.1017/S0263574714001878 [20] Liao F, Teo R, Wang J, Dong X, Lin F, Peng K. Distributed formation and reconfiguration control of VTOL UAVs. IEEE Transactions on Control Systems Technology, 2016, 25(1): 270−277 [21] Qiu H, Duan H, Fan Y. Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks. Control Theory & Applications, 2015, 32(10): 1298−1304 [22] Cai D, Sun J, Wu S. UAVs formation flight control based on behavior and virtual structure. Asian Simulation Conference. Springer, Berlin, Heidelberg, 2012: 429−438 [23] Askari A, Mortazavi M, Talebi H. UAV formation control via the virtual structure approach. Journal of Aerospace Engineering, 2013, 28(1): 04014047 [24] Kuriki Y, Namerikawa T. Formation control with collision avoidance for a multi-UAV system using decentralized MPC and consensus-based control. SICE Journal of Control, Measurement, and System Integration, 2015, 28(1): 285−294 [25] Weimerskirch H, Martin J, Clerquin Y, et al. Energy saving in flight formation. Nature, 2001, 413: 158−162 [26] Voelkl B, Portugal S, Unsöld M, Usherwood J. Matching times of leading and following suggest cooperation through direct reciprocity during V-formation flight in IBIS. Proceedings of the National Academy of Sciences, 2015, 112(7): 2115−2120 doi: 10.1073/pnas.1413589112 [27] Malte A, Johan W. Kin selection and reciprocity in flight formation? Behavioral Ecology, 2004, 15(1): 158−162 doi: 10.1093/beheco/arg109 [28] Gould L, Heppner F. The vee formation of canada geese. The Auk, 1974, 91: 494−506 doi: 10.2307/4084469 [29] 刘成功. 无人机仿生紧密编队飞行控制技术研究 [硕士学位论文], 南京航空航天大学, 中国, 2009Liu Cheng-Gong. Research on Biomimetic Close Formation Flight Control of UAVs [Master Thesis], Nanjing University of Aeronautics and Astronautics, China, 2009 [30] Badgerow J P. An analysis of function in the formation flight of Canada geese. The Auk, 1988, 105(4): 749−755 doi: 10.1093/auk/105.4.749 [31] Jacques D, Pachter M, Wagner G, Blake B. An analytical study of drag reduction in tight formation flight. AIAA Atmospheric Flight Mechanics Conference and Exhibit, 2001: 4075 [32] Dogan A, Venkataramanan S, Blake W. Modeling of aerodynamic coupling between aircraft in close proximity. Journal of Aircraft, 2005, 42(4): 941−955 doi: 10.2514/1.7579 [33] Proud A, Pachter M, D'Azzo J. Close formation flight control. Guidance, Navigation, and Control Conference and Exhibit, 1999: 4207 [34] Mirzaeinia A, Hassanalian M, Lee K, Mirzaeinia M. Energy conservation of V-shaped swarming fixed-wing drones through position reconfiguration. Aerospace Science and Technology, 2019, 105(4): 105398 [35] Banazadeh A, Taymourtash N. Adaptive attitude and position control of an insect-like flapping wing air vehicle. Nonlinear Dynamics, 2016, 85(1): 47−66 doi: 10.1007/s11071-016-2666-8 [36] Jones K D, Platzer M F. Design and development considerations for biologically inspired flapping-wing micro air vehicles. Animal Locomotion. Springer, 2010: 237−248 [37] Gupta N, Ordonez C, Collins E G. Dynamically feasible, energy efficient motion planning for skid-steered vehicles. Autonomous Robots, 2017, 41(2): 453−471 doi: 10.1007/s10514-016-9550-8 -



 下载:
下载:




计量
- 文章访问数: 2898
- HTML全文浏览量: 945
- PDF下载量: 513
- 被引次数: 0
