

Research Status and Prospect of Target Tracking Technologies via Underwater Sensor Networks
-
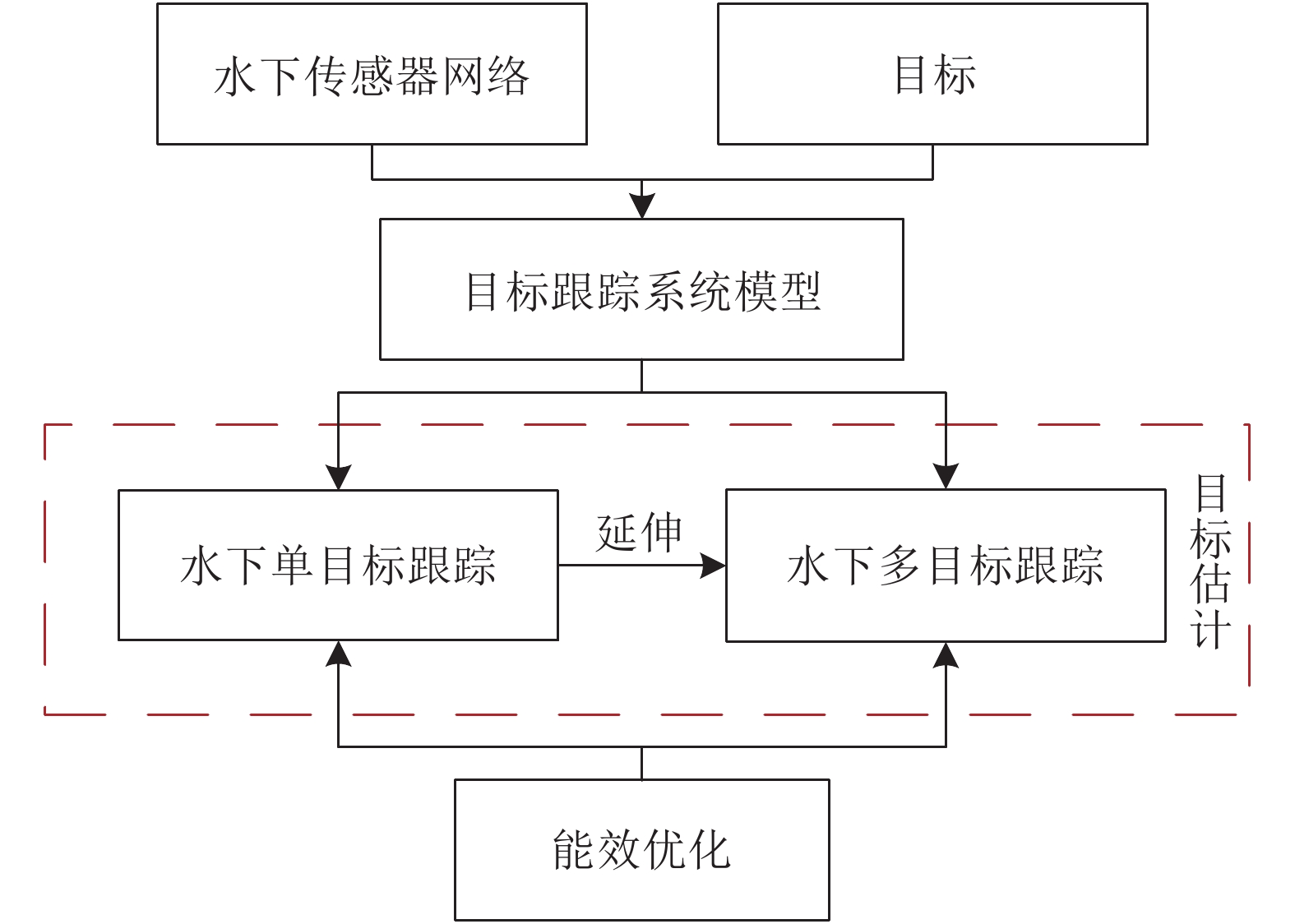
摘要: 水下目标跟踪在海洋资源的开发利用以及国家安全的防御等方面都具有广泛的应用价值和重要的战略意义. 基于水下传感器网络(Underwater sensor networks, USNs)的目标跟踪技术凭借其覆盖范围广、观测时间长和实时融合等优势已经成为一个新的研究热点. 本文针对基于USNs的目标跟踪关键技术的基本思想、研究进展、应用及局限性进行了综述, 主要从以下几个角度对其展开论述: USNs的建设现状、系统组成及其分类、目标跟踪系统模型、单目标跟踪技术、多目标跟踪技术以及能效优化措施. 最后, 本文不仅指出了基于USNs的目标跟踪研究目前存在的主要挑战, 并对该领域的未来发展方向进行了展望.Abstract: Underwater target tracking has extensive application value and important strategic significance in the development and utilization of marine resources, and national security defense. Target tracking technology via underwater sensor networks (USNs) has become a new research hotspot for its wide coverage, long observation time and real-time fusion. This paper gives a review of the basic ideas, research progresses, applications, and limitations of those key technologies of target tracking via USNs. It is mainly discussed from the following respects: the construction status of USNs, system composition and classification, target tracking system model, single target tracking technoligies, multi-target tracking technoligies, and energy efficiency optimization measures. Furthermore, this paper not only points out the main challenges of researches of target tracking via USNs, but also prospects the future development direction of the field.
-
表 1 各种数据关联算法的比较
Table 1 Comparison of various data association algorithms
方法 优点 缺点 适用场景 NN/GNN 计算量小, 实时性较好, 工程实现简单 抗干扰能力弱, 在量测信息密度较大或环境因素过于复杂时, 性能较差 仅适用于信噪比较高, 目标密度较小的场合 PDA 计算量和存储量较小, 易于工程实现 在密集杂波或多目标环境中容易产生误跟或丢失等现象 适用于杂波环境下的单目标或跟踪门不重叠的多目标环境 JPDA 不需要任何关于目标和杂波的先验信息 计算量和存储量大, 实时性差, 工程实现困难, 量测数和目标数较大时存在组合爆炸现象 适用于密集多目标和多杂波、目标数目恒定已知的情况 MHT 在理想条件下是处理数据关联的最优算法 计算量大, 过于依赖目标和杂波的先验知识, 假设数量随量测数和目标数呈指数级增长 适用于密集多目标和多杂波、目标数未知且时变的情况 PMHT 批处理方法, 计算量随目标数的增长而呈线性增长 目标的后验概率函数可能会收敛到局部最大值, 算法对初始值比较敏感 适用于密集多目标和多杂波、目标数未知且时变的情况  下载: 导出CSV
下载: 导出CSV
-
[1] 李双建, 徐从春. 论海洋的战略地位和现代海洋发展观. 经济研究导刊, 2012, (27): 256−259Li Shuang-Jian, Xu Cong-Chun. Discussion on the Ocean's strategic position and modern ocean development concept. Economic Research Guide, 2012, (27): 256−259 [2] 刘忠, 刘志坤, 罗亚松, 颜冰, 胡洪宁. 水下自组织网络及军事应用. 北京: 国防工业出版社, 2015. 8−10Liu Zhong, Liu Zhi-Kun, Luo Ya-Song, Yan Bing, Hu Hong-Ning. Underwater Self-Organizing Network and Military Applications. Beijing: National Defense Industry Press, 2015. 8−10 [3] 郭戈, 王兴凯, 徐慧朴. 基于声呐图像的水下目标检测、识别与跟踪研究综述. 控制与决策, 2018, 33(5): 906−922Guo Ge, Wang Xing-Kai, Xu Hui-Pu. Review on underwater target detection, recognition and tracking based on sonar image. Control and Decision, 2018, 33(5): 906−922 [4] Chen Z Y, Xu W. Joint passive detection and tracking of underwater acoustic target by beamforming-based Bernoulli filter with multiple arrays. Sensors, 2018, 18(11): 4022 doi: 10.3390/s18114022 [5] Sozer E M, Stojanovic M, Proakis J G. Underwater acoustic networks. IEEE Journal of Oceanic Engineering, 2000, 25(1): 72−83 doi: 10.1109/48.820738 [6] Ghafoor H, Noh Y. An overview of next-generation underwater target detection and tracking: An integrated underwater architecture. IEEE Access, 2019, 7: 98841−98853 doi: 10.1109/ACCESS.2019.2929932 [7] Isbitiren G, Akan O B. Three-dimensional underwater target tracking with acoustic sensor networks. IEEE Transactions on Vehicular Technology, 2011, 60(8): 3897−3906 doi: 10.1109/TVT.2011.2163538 [8] Luo J H, Han Y, Fan L Y. Underwater acoustic target tracking: A review. Sensors, 2018, 18(2): 112 doi: 10.3390/s18010112 [9] Luo H J, Wu K S, Ruby R, Liang Y Q, Guo Z W, Ni L M. Software-defined architectures and technologies for underwater wireless sensor networks: A survey. IEEE Communications Surveys & Tutorials, 2018, 20(4): 2855−2888 [10] Akyildiz I F, Pompili D, Melodia T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Networks, 2005, 3(3): 257−279 doi: 10.1016/j.adhoc.2005.01.004 [11] Tuna G, Gungor V C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. International Journal of Communication Systems, 2017, 30(17): e3350 doi: 10.1002/dac.3350 [12] Akyildiz I F, Pompili D, Melodia T. Challenges for efficient communication in underwater acoustic sensor networks. ACM SIGBED Review, 2004, 1(2): 3−8 doi: 10.1145/1121776.1121779 [13] 李风华, 路艳国, 王海斌, 郭永刚, 张飞. 海底观测网的研究进展与发展趋势. 中国科学院院刊, 2019, 34(3): 321−330Li Feng-Hua, Lu Yan-Guo, Wang Hai-Bin, Guo Yong-Gang, Zhang Fei. Research progress and development trend of seafloor observation network. Bulletin of the Chinese Academy of Sciences, 2019, 34(3): 321−330 [14] O'Donnell J, Codiga D, Edwards C, Ullman D, Hebert D, Rice J, et al. Front Resolving Observational Network with Telemetry (FRONT). Connecticut Univ Groton Marine Sciences Inst, 2002 [15] 佟盛, 张信学. 美军水下网络中心战技术发展及设想. 舰船科学技术, 2009, 31(2): 155−159Tong Sheng, Zhang Xin-Xue. The technological development and imagine of US navy underwater network centric warfare. Ship Science and Technology, 2009, 31(2): 155−159 [16] Grund M, Freitag L, Preisig J, Ball K. The PLUSNet underwater communications system: Acoustic telemetry for undersea surveillance. In: Proceedings of OCEANS 2006. Boston, MA, USA: IEEE, 2006. 1−5 [17] Killeen T L. Ocean Observatories Initiative (OOI): Advanced research tools for the ocean sciences. Marine Technology Society Journal, 2010, 44(6): 15−17 doi: 10.4031/MTSJ.44.6.18 [18] 李建如, 许惠平. 加拿大“海王星” 海底观测网. 地球科学进展, 2011, 26(6): 656−661Li Jian-Ru, Xu Hui-Ping. NEPTUNE-Canada. Advances in Earth Science, 2011, 26(6): 656−661 [19] 申中寅. 日本海洋实时监测系统DONET简介. 国际地震动态, 2018, (7): 34−40Shen Zhong-Yin. A brief introduction to DONET in Japan. Recent Developments in World Seismology, 2018, (7): 34−40 [20] Person R, Miranda J M, Puillat I. ESONIM − European seafloor observatory network implementation model. Esonews, 2008, 1(3): 1−8 [21] 杨丽坤. 海洋强国战略的顶层设计研究. 大连海事大学学报(社会科学版), 2015, 14(2): 73−77Yang Li-Kun. The top-level design research of the strategy of maritime power. Journal of Dalian Maritime University (Social Science Edition), 2015, 14(2): 73−77 [22] 国务院关于印发国家重大科技基础设施建设中长期规划(2012−2030年). 中国科技投资, 2013, (7): 9State Council's plan for issuing national mid- and long-term plans for the construction of major science and technology infrastructure (2012−2030). China Venture Capital, 2013, (7): 9 [23] 房建孟. 全国海洋观测网规划(2014−2020年). 中国海洋年鉴, 2015. 41−46Fang Jian-Meng. National Marine observation network planning (2014−2020). China Marine Yearbook, 2015. 41−46 [24] 许惠平, 张艳伟, 徐昌伟, 李建如, 刘丁, 覃如府, 等. 东海海底观测小衢山试验站. 科学通报, 2011, 56(22): 1839−1845 doi: 10.1360/csb2011-56-22-1839Xu Hui-Ping, Zhang Yan-Wei, Xu Chang-Wei, Li Jian-Ru, Liu Ding, Qin Ru-Fu, et al. Coastal seafloor observatory at Xiaoqushan in the East China Sea. Chinese Science Bulletin, 2011, 56(22): 1839−1845 doi: 10.1360/csb2011-56-22-1839 [25] 彭晓彤, 周怀阳, 吴邦春, 吕枫, 吴正伟, 杨灿军, 等. 美国MARS海底观测网络中国节点试验. 地球科学进展, 2011, 26(9): 991−996Peng Xiao-Tong, Zhou Huai-Yang, Wu Bang-Chun, Lv Feng, Wu Zheng-Wei, Yang Can-Jun, et al. Test China node on monterey accelerated research system (MARS). Advances in Earth Sciences, 2011, 26(9): 991−996 [26] 《声学技术》编辑部. 中国科学院声学研究所首次实现我国深海潜标数据无线实时传输. 声学技术, 2017, (1): 87Editorial Department of “Acoustics Technology”. The institute of acoustics of the Chinese Academy of Sciences has realized the wireless real-time transmission of deep-sea submersible data for the first time. Technical Acoustics, 2017, (1): 87 [27] 央视新闻客户端. 我国将建国家海底科学观测网总投资超20亿元. 科技传播, 2017, 9(11): 8CCTV News Client. China will build a national seabed science observation network with a total investment of more than 2 billion Yuan. Public Communication of Science & Technology, 2017, 9(11): 8 [28] Teymorian A Y, Cheng W, Ma L R, Cheng X Z, Lu X C, Lu Z X. 3D underwater sensor network localization. IEEE Transactions on Mobile Computing, 2009, 8(12): 1610−1621 doi: 10.1109/TMC.2009.80 [29] Lin W L, Li D S, Tan Y, Chen J, Sun T. Architecture of underwater acoustic sensor networks: A survey. In: Proceedings of the 2008 1st International Conference on Intelligent Networks and Intelligent Systems. Wuhan, China: IEEE, 2008. 155−159 [30] 陈华炎. 基于水下无线传感器网络的高能效目标跟踪研究[博士学位论文], 浙江大学, 中国, 2018Chen Hua-Yan. Energy-Efficient Target Tracking based on UWSNs [Ph. D. dissertation], Zhejiang University, China, 2018 [31] Li L, Qiao G X, Zhao J, Yang L J, Imtiaz M N. Design of communication node in underwater acoustic network. In: Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC). Shengyang, China: IEEE, 2013. 591−594 [32] Maqsood H, Javaid N, Yahya A, Ali B, Khan Z A, Qasim U. MobiL-AUV: AUV-aided localization scheme for underwater wireless sensor networks. In: Proceedings of the 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS-2016). Fukuoka, Japan: IEEE, 2016. 170−175 [33] Gong Z J, Li C, Jiang F. AUV-aided joint localization and time synchronization for underwater acoustic sensor networks. IEEE Signal Processing Letters, 2018, 25(4): 477−481 doi: 10.1109/LSP.2018.2799699 [34] Yang H M, Sikdar B. A mobility based architecture for underwater acoustic sensor networks. In: Proceedings of the 2008 IEEE Global Telecommunications Conference. New Orleans, LO, USA: IEEE, 2008. 1−5 [35] Lin Y, Tao H X, Tu Y, Liu T. A node self-localization algorithm with a mobile anchor node in underwater acoustic sensor networks. IEEE Access, 2019, 7: 43773−43780 doi: 10.1109/ACCESS.2019.2904725 [36] 黎作鹏, 蔡绍滨, 张菁, 高振国, 赵靖. 水声传感器网络节点定位技术综述. 小型微型计算机系统, 2012, 33(3): 442−447Li Zuo-Peng, Cai Shao-Bin, Zhang Jing, Gao Zhen-Guo, Zhao Jing. Survey on node localization technology of underwater acoustic sensor networks. Journal of Chinese Computer Systems, 2012, 33(3): 442−447 [37] 周宏仁, 敬忠良, 王培德. 机动目标跟踪. 北京: 国防工业出版社, 1991. 12−13Zhou Hong-Ren, Jing Zhong-Liang, Wang Pei-De. Tracking of Maneuvering Targets. Beijing: National Defense Industry Press, 1991. 12−13 [38] Singer R A. Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Transactions on Aerospace & Electronic Systems, 1970, AES-6(4): 473−483 [39] Moose R L. An adaptive state estimation solution to the maneuvering target problem. IEEE Transactions on Automatic Control, 1975, 20(3): 359−362 doi: 10.1109/TAC.1975.1100961 [40] 周宏仁. 机动目标“当前”统计模型与自适应跟踪算法. 航空学报, 1983, 4(1): 73−86Zhou Hong-Ren. A “Current” statistical model and adaptive tracking algorithm for maneuvering targets. Acta Aeronautica et Astronautica Sinica, 1983, 4(1): 73−86 [41] Mehrotra K, Mahapatra P R. A jerk model for tracking highly maneuvering targets. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(4): 1094−1105 doi: 10.1109/7.624345 [42] Blom H A P, Bar-Shalom Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Transactions on Automatic Control, 1988, 33(8): 780−783 doi: 10.1109/9.1299 [43] 党建武. 水下多目标跟踪理论. 西安: 西北工业大学出版社, 2009. 38−43Dang Jian-Wu. Underwater Multi-target Tracking. Xi' an: Northwestern Polytechnical University Press, 2009. 38−43 [44] Xu J, Xu M Z, Zhou X Y. The bearing only target tracking of UUV based on cubature Kalman filter with noise estimator. In: Proceedings of the 36th Chinese Control Conference. Dalian, China, 2017. 5288−5293 [45] Wang X, Xu M X, Wang H B, Wu Y. Combination of interacting multiple models with the particle filter for three-dimensional target tracking in underwater wireless sensor networks. Mathematical Problems in Engineering, 2012, 2012: Article ID 829451 [46] Zhang J X, Liu M Q, Fan Z. Classify motion model via SVM to track underwater maneuvering target. In: Proceedings of the 2019 IEEE International Conference on Signal Processing, Communications and Computing. Dalian, China: IEEE, 2019. 1−6 [47] He C F, Wang Y Y, Chen C L, Guan X P. Target localization for a distributed SIMO sonar with an isogradient sound speed profile. IEEE Access, 2018, 6: 29770−29783 doi: 10.1109/ACCESS.2018.2843438 [48] Ramezani H, Jamali-Rad H, Leus G. Target localization and tracking for an isogradient sound speed profile. IEEE Transactions on Signal Processing, 2013, 61(6): 1434−1446 doi: 10.1109/TSP.2012.2235432 [49] 张铎. 基于水下无线传感器网络的自组织目标跟踪算法研究[博士学位论文], 浙江大学, 中国, 2019Zhang Duo. Self-Organizing Target Tracking based on UWSNs [Ph. D. dissertation], Zhejiang University, China, 2019 [50] Rao S K, Murthy K S L, Rajeswari K R. Data fusion for underwater target tracking. IET Radar, Sonar and Navigation, 2010, 4(4): 576−585 doi: 10.1049/iet-rsn.2008.0109 [51] Smith D, Singh S. Approaches to multisensor data fusion in target tracking: A survey. IEEE Transactions on Knowledge and Data Engineering, 2006, 18(12): 1696−1710 doi: 10.1109/TKDE.2006.183 [52] Luo R C, Yih C C, Su K L. Multisensor fusion and integration: Approaches, applications, and future research directions. IEEE Sensors Journal, 2002, 2(2): 107−119 doi: 10.1109/JSEN.2002.1000251 [53] Qiu J, Xing Z R, Zhu C S, Lu K F, He J L, Sun Y B, et al. Centralized fusion based on interacting multiple model and adaptive kalman filter for target tracking in underwater acoustic sensor networks. IEEE Access, 2019, 7: 25948−25958 doi: 10.1109/ACCESS.2019.2899012 [54] Hare J, Gupta S, Song J N. Distributed smart sensor scheduling for underwater target tracking. In: Proceedings of the 2014 Oceans. John's, NL, Canada: IEEE, 2014. 1−6 [55] Braca P, Goldhahn R, Ferri G, Lepage K D. Distributed information fusion in multistatic sensor networks for underwater surveillance. IEEE Sensors Journal, 2015, 16(11): 4003−4014 [56] Yu C H, Choi J W. Interacting multiple model filter-based distributed target tracking algorithm in underwater wireless sensor networks. International Journal of Control, Automation and Systems, 2014, 12(3): 618−627 doi: 10.1007/s12555-013-0238-y [57] Hare J Z, Gupta S, Song J N, Wettergren T A. Classification induced distributed sensor scheduling for energy-efficiency in underwater target tracking sensor networks. In: Proceedings of the 2017 Oceans. Anchorage, AK, USA: IEEE, 2017. 1−7 [58] 关欣, 何友, 衣晓. 带反馈信息的纯方位水下分布式融合算法. 系统仿真学报, 2003, 15(7): 947−949Guan Xin, He You, Yi Xiao. Bearings-only underwater distributed fusion algorithm with feedback information. Journal of System Simulation, 2003, 15(7): 947−949 [59] Han X Y, Liu M Q, Zhang S L, Zhang Q F. A multi-node cooperative bearing-only target passive tracking algorithm via UWSNs. IEEE Sensors Journal, 2019, 19(22): 10609−10623 doi: 10.1109/JSEN.2019.2931885 [60] Liu M Q, Zhao L J, Zhang S L. Delay-estimation-based asynchronous particle filtering for passive target tracking in underwater wireless sensor networks. In: Proceedings of the 36th Chinese Control Conference (CCC). Dalian, China: IEEE, 2017, 8929−8934 [61] 赵立佳. 基于水下传感网络异步量测的目标跟踪算法研究[硕士学位论文], 浙江大学, 中国, 2019Zhao Li-Jia. Target Tracking Algorithms based on Asynchronous Measurement of USNs [Master thesis], Zhejiang University, China, 2019 [62] Yan J, Zhang X N, Luo X Y, Sun Y L, Guan X P. AUV assisted asynchronous localization for underwater sensor networks. In: Proceeding of the 35th Chinese Control Conference (CCC). Chengdu, China: IEEE, 2016. 7291−7296 [63] Yan J, Zhang X N, Luo X Y, Wang Y Y, Chen C L, Guan X P. Asynchronous localization with mobility prediction for underwater acoustic sensor networks. IEEE Transactions on Vehicular Technology, 2018, 67(3): 2543−2556 doi: 10.1109/TVT.2017.2764265 [64] 朱光明. 异步水下传感器网络目标跟踪算法研究[博士学位论文], 浙江大学, 中国, 2015Zhu Guang-Ming. Research on Target Tracking Algorithms for Asynchronous Underwater Sensor Networks [Ph. D. dissertation], Zhejiang University, China, 2015 [65] Yan J, Zhao H Y, Pu B, Luo X Y, Chen C L, Guan X P. Energy-efficient target tracking with UASNs: A consensus-based Bayesian approach. IEEE Transactions on Automation Science and Engineering, 2020, 17(3): 1361−1375 [66] 薛锋, 刘忠, 曲毅. 基于Unscented粒子滤波的无序观测下水下无线传感器网络目标被动跟踪. 传感技术学报, 2007, 20(12): 2653−2658Xue Feng, Liu Zhong, Qu Yi. Target passive tracking based on unscented particle filter with out-of-sequence measurements in underwater wireless sensor networks. Chinese Journal of Sensors & Actuators, 2007, 20(12): 2653−2658 [67] Qiu W, Li L, Lei P Z, Wang Z L. Multiple targets tracking by using probability data association and cubature Kalman filter. In: Proceedings of the 10th International Conference on Wireless Communications and Signal Processing (WCSP). Hangzhou, China: IEEE, 2018. 1−5 [68] Qiu W, Wang W K, Zhuang Z Y, Lei P Z, Li L. Using ship radiated noise spectrum feature for data association in underwater target tracking. In: Proceedings of the 20th International Conference on Information Fusion (Fusion). Xi' an, China: IEEE, 2017. 1−5 [69] Yao Y, Zhao J H, Wu L N. Doppler data association scheme for multi-target tracking in an active sonar system. Sensors, 2019, 19(9): 2003 doi: 10.3390/s19092003 [70] Seget K, Schulz A, Heute U. Multi-hypothesis tracking and fusion techniques for multistatic active sonar systems. In: Proceedings of the 13th International Conference on Information Fusion. Edinburgh, UK: IEEE, 2010. 1−8 [71] Li X H, Willett P, Baum M, Li Y A. PMHT approach for underwater bearing-only multisensor−multitarget tracking in clutter. IEEE Journal of Oceanic Engineering, 2016, 41(4): 831−839 doi: 10.1109/JOE.2015.2506220 [72] Li X H, Li Y A, Yu J, Chen X, Dai M. PMHT approach for multi-target multi-sensor sonar tracking in clutter. Sensors, 2015, 15(11): 28177−28192 doi: 10.3390/s151128177 [73] Li X H, Zhao C X, Lu X F, Wei W. Underwater bearings-only multitarget tracking based on modified PMHT in dense-cluttered environment. IEEE Access, 2019, 7: 93678−93689 doi: 10.1109/ACCESS.2019.2927403 [74] 江同洋. 基于随机有限集的多目标贝叶斯滤波方法研究[博士学位论文], 浙江大学, 中国, 2015Jiang Tong-Yang. Multi-target Bayes Filtering based on Random Finite Sets [Ph. D. dissertation], Zhejiang University, China, 2015 [75] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152−1178 doi: 10.1109/TAES.2003.1261119 [76] Mahler R. PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523−1543 doi: 10.1109/TAES.2007.4441756 [77] Melo J, Matos A. A PHD filter for tracking multiple AUVs. In: Proceedings of the 2014 Oceans. St. John's, NL, Canada: IEEE, 2014. 1−8 [78] Zhang S Z, Zhang X M, Yu Y. A forward-backward PHD smoother for tracking multiple AUVs. In: Proceedings of OCEANS. Shanghai, China: IEEE, 2016. 1−8 [79] Chen X, Li Y A, Li Y X, Yu J. PHD and CPHD algorithms based on a novel detection probability applied in an active sonar tracking system. Applied Sciences, 2018, 8(1): 36 [80] 王佰录. 基于随机集理论的分布式多传感器多目标跟踪技术研究[博士学位论文], 电子科技大学, 中国, 2018Wang Bai-Lu. Distributed Multi-Sensor Multi-Target Tracking in the Framework of Random Finite Sets [Ph. D. dissertation], University of Electronic Science and Technology, China, 2018 [81] Jing L Y, He C B, Huang J G, Ding Z. Energy management and power allocation for underwater acoustic sensor network. IEEE Sensors Journal, 2017, 17(19): 6451−6462 doi: 10.1109/JSEN.2017.2737229 [82] Yu C H, Lee K H, Choi J W, Seo Y B. Distributed single target tracking in underwater wireless sensor networks. In: Proceedings of the 2008 SICE Annual Conference. Tokyo, Japan: IEEE, 2008. 1351−1356 [83] Huang Y, Liang W, Yu H B, Xiao Y. Target tracking based on a distributed particle filter in underwater sensor networks. Wireless Communications and Mobile Computing, 2008, 8(8): 1023−1033 doi: 10.1002/wcm.660 [84] Hare J, Gupta S, Song J N. Distributed smart sensor scheduling for underwater target tracking. In: Proceedings of the 2014 Oceans. St. John's, NL, Canada: IEEE, 2014. 1−6 [85] Zhang Q, Zhang C J, Liu M Q, Zhang S L. Local node selection for target tracking based on underwater wireless sensor networks. International Journal of Systems Science, 2015, 46(16): 2918−2927 doi: 10.1080/00207721.2014.880199 [86] Sun Y L, Yuan Y Z, Li X L, Xu Q M, Guan X P. An adaptive sampling algorithm for target tracking in underwater wireless sensor networks. IEEE Access, 2018, 6: 68324−68336 doi: 10.1109/ACCESS.2018.2879536 [87] Zhang S L, Chen H Y, Liu M Q. Adaptive sensor scheduling for target tracking in underwater wireless sensor networks. In: Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC). Jinzhou, China: IEEE, 2014. 55−60 [88] Chen H Y, Zhang S L, Liu M Q, Zhang Q F. An artificial measurements-based adaptive filter for energy-efficient target tracking via underwater wireless sensor networks. Sensors, 2017, 17(5): 971 doi: 10.3390/s17050971 [89] Zhang Q, Liu M Q, Zhang S L. Node topology effect on target tracking based on UWSNs using quantized measurements. IEEE Transactions on Cybernetics, 2015, 45(10): 2323−2335 doi: 10.1109/TCYB.2014.2371232 [90] Zhang S L, Chen H Y, Liu M Q, Zhang Q F. Optimal quantization scheme for data-efficient target tracking via UWSNs using quantized measurements. Sensors, 2017, 17(11): 2565 doi: 10.3390/s17112565 [91] Luo J H, Han Y, He X T. Optimal bit allocation for maneuvering target tracking in UWSNs with additive and multiplicative noise. Signal Processing, 2019, 164: 125−135 doi: 10.1016/j.sigpro.2019.06.005 [92] Zhang D, Liu M Q, Zhang S L, Fan Z, Zhang Q F. Mutual-information based weighted fusion for target tracking in underwater wireless sensor networks. Frontiers of Information Technology & Electronic Engineering, 2018, 19(4): 544−556 [93] Zhang D, Liu M Q, Zhang S L, Zhang Q F. Non-myopic energy allocation for target tracking in energy harvesting UWSNs. IEEE Sensors Journal, 2019, 19(10): 3772−3783 doi: 10.1109/JSEN.2018.2890078 [94] Han G J, Zhang C Y, Shu L, Rodrigues J J P C. Impacts of deployment strategies on localization performance in underwater acoustic sensor networks. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1725−1733 doi: 10.1109/TIE.2014.2362731 [95] Zhang Q, Liu M Q, Zhang S L, Chen H Y. Node topology effect on target tracking based on underwater wireless sensor networks. In: Proceedings of the 17th International Conference on Information Fusion (FUSION). Salamanca, Spain: IEEE, 2014. 1−8 [96] Liu M Q, Zhang D, Zhang S L, Zhang Q F. Node depth adjustment based target tracking in UWSNs using improved harmony search. Sensors, 2017, 17(12): 2807 doi: 10.3390/s17122807 [97] Fariborzi H, Moghavvemi M. EAMTR: Energy aware multi-tree routing for wireless sensor networks. IET Communications, 2009, 3(5): 733−739 doi: 10.1049/iet-com.2008.0238 [98] Zhang R, Labrador M A. Energy-aware topology control in heterogeneous wireless multi-hop networks. In: Proceedings of the 2nd International Symposium on Wireless Pervasive Computing. San Juan, Puerto Rico: IEEE, 2007. 25−30 [99] Zeng D, Yan S F, Xu L J, Zhang Z. The low power DSP platform design of underwater acoustic communication system. In: Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC). Hong Kong, China: IEEE, 2016. 1−4 [100] Jiang P, Liu J, Wu F, Wang J Z, Xue A K. Node deployment algorithm for underwater sensor networks based on connected dominating set. Sensors, 2016, 16(3): 388 doi: 10.3390/s16030388 [101] Bouabdallah F, Zidi C, Boutaba R. Joint routing and energy management in underwater acoustic sensor networks. IEEE Transactions on Network and Service Management, 2017, 14(2): 456−471 doi: 10.1109/TNSM.2017.2679482 [102] Chen K Y, Ma M D, Cheng E, Yuan F, Su W. A survey on MAC protocols for underwater wireless sensor networks. IEEE Communications Surveys & Tutorials, 2014, 16(3): 1433−1447 -

 下载:
下载:



图(11) / 表(1)
计量
- 文章访问数: 4009
- HTML全文浏览量: 2136
- PDF下载量: 1020
- 被引次数: 0
