

An Enhanced Ant Colony Optimization Combined With Clustering Decomposition for Solving Complex Green Vehicle Routing Problem
-
摘要: 针对带时间窗的低能耗多车场多车型车辆路径问题(Low-energy-consumption multi-depots heterogeneous-fleet vehicle routing problem with time windows, LMHFVPR_TW), 提出一种结合聚类分解策略的增强蚁群算法(Enhanced ant colony optimization based on clustering decomposition, EACO_CD)进行求解. 首先, 由于该问题具有强约束、大规模和NP-Hard等复杂性, 为有效控制问题的求解规模并合理引导算法在优质解区域搜索, 根据问题特点设计两种基于K-means的聚类策略, 将LMHFVPR_TW合理分解为一系列带时间窗的低能耗单车场单车型车辆路径子问题(Low-energy-consumption vehicle routing problem with time windows, LVRP_TW); 其次, 本文提出一种增强蚁群算法(Enhanced ant colony optimization, EACO)求解分解后的各子问题(LVRP_TW), 进而获得原问题的解. EACO不仅引入信息素挥发系数控制因子进一步动态调节信息素挥发系数, 从而有效控制信息素的挥发以提高算法的全局搜索能力, 而且设计基于4种变邻域操作的两阶段变邻域局部搜索(Two-stage variable neighborhood search, TVNS)来增强算法的局部搜索能力. 最后, 在不同规模问题上的仿真和对比实验验证了所提EACO_CD的有效性.Abstract: In this paper, an enhanced ant colony optimization combined with clustering decomposition strategy (EACO_CD) is proposed for solving the low-energy-consumption multi-depots heterogeneous-fleet vehicle routing problem with time windows (LMHFVPR_TW). Firstly, since the considered problem is a complex one with strong constraints, large scale and NP-hardness, In order to control the scale of problem and reasonably guide the algorithm to search in the high-quality solution region, two kinds of clustering methods based on K-means strategies are designed to reasonably decompose it into a series of subproblems (i.e., the low-energy-consumption vehicle routing problems with time windows (LVRP_TW) by utilizing the problem characteristics. Secondly, an enhanced ant colony optimization (EACO) to solve the decomposed subproblems (LVRP_TW) for obtaining the solution of the original problem is proposed. Not only a control factor of pheromone decay parameter in EACO is added to adjust the pheromone decay parameter dynamically so as to control the volatilization of pheromone effectively and improve the global search ability of ACO, but also a two-stage variable neighborhood search (TVNS) is designed based on four variable neighborhood operations to enhance its the local search ability. Finally, simulation experiments and comparisons on instances with different scales demonstrate the effectiveness of proposed EACO_CD.
-

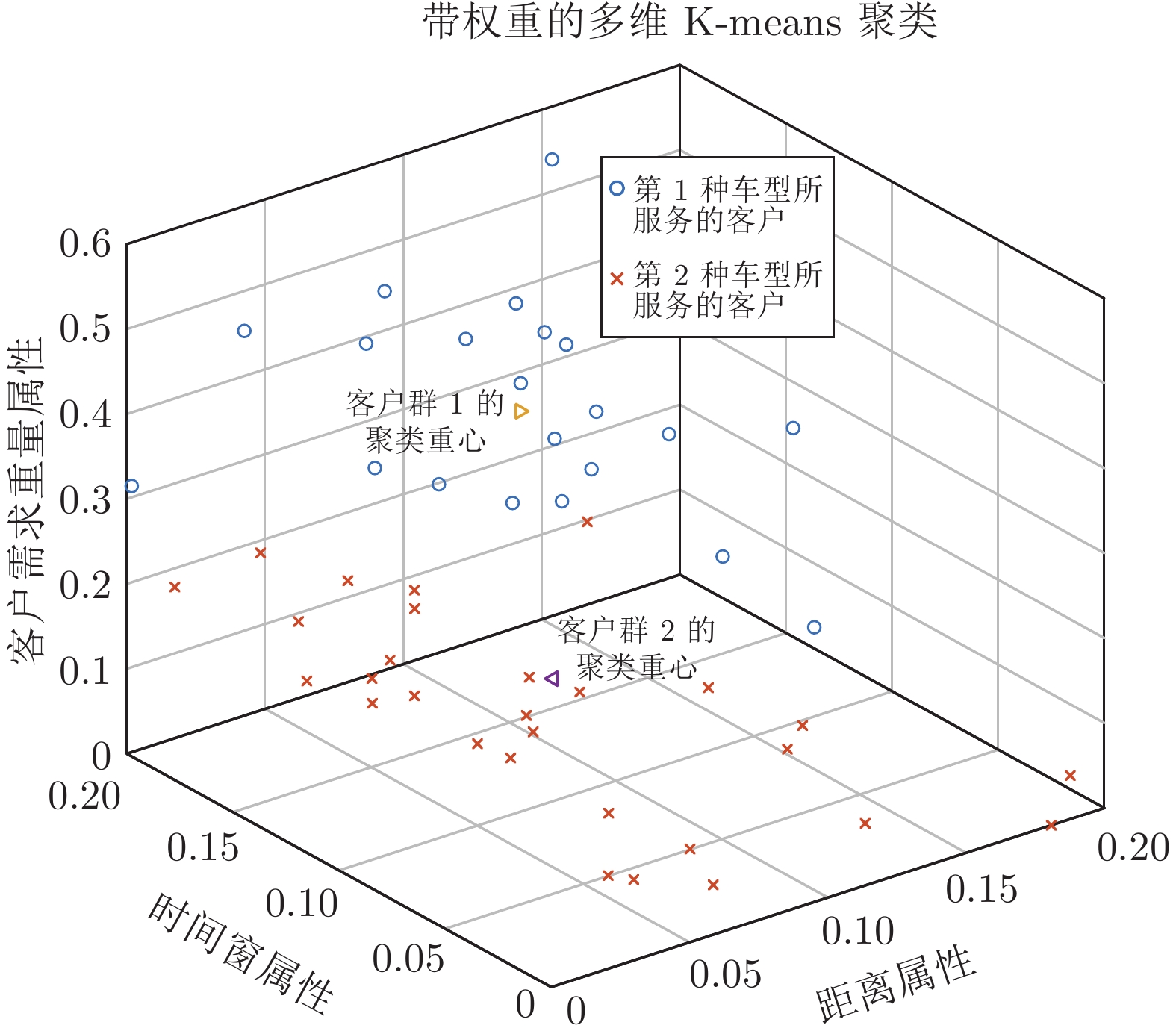
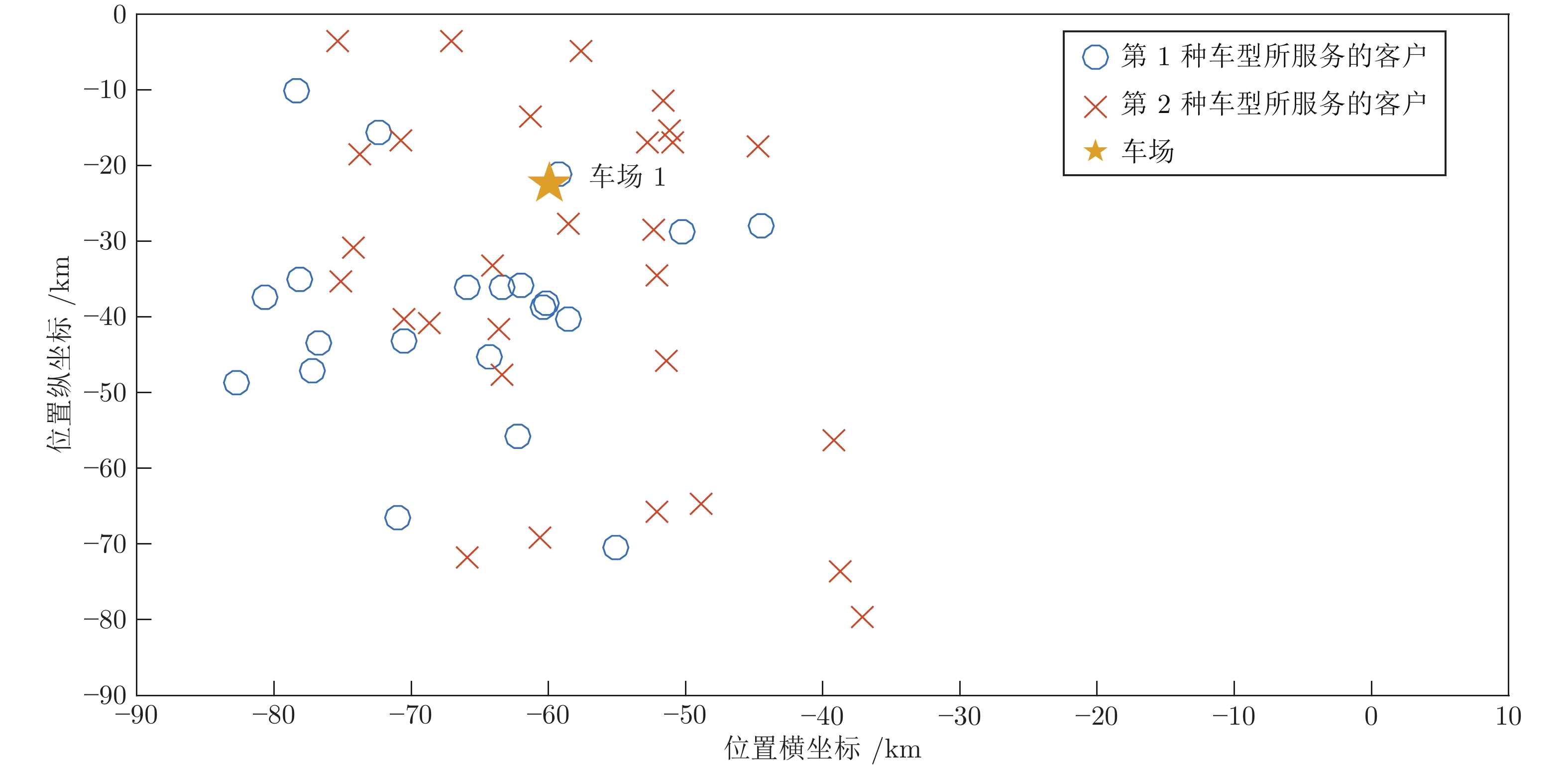
图 3 3车场K-means未平衡聚类与平衡聚类比较
Fig. 3 Comparison of unbalanced K-means cluster and balanced K-means cluster of three depots
表 1 符号及定义
Table 1 Symbols and definitions
符号 释义 符号 释义 $F_1$ 运输距离费用 $H_{PM}$ 车场P 中有$H_{PM}$辆$M$类型的车辆 $F_2$ 车辆固定成本 $r(A)$ 完成客户子集$A$中所有客户的配送需要的最少车辆数 $F_3$ 燃油消耗费用 $N$ 总共有$N$个客户 $F_4$ 时间窗惩罚费用 $V$ 客户编号集合$\{1,2,\cdots,\ N\} $ (0 表示车场) $C_{M1}$ 第$M$种类型车辆的距离费用系数 $M_t$ 共有$M_t$种类型的车辆 $C_{M2}$ 第$M$种类型车辆的固定发车费用系数 $k$ 车辆编号 $C_{M3}$ 第$M$种类型车辆的燃油费用系数 $x_{PMijk}$ 车场$P$车型$M$的第$k$辆车从客户$i$到客户$j$的决策变量 $C_1$ 配送车辆提前到达的单位惩罚费用 $d_{ij}$ 客户$i$到客户$j$的距离 $C_2$ 配送车辆迟到的单位惩罚费用 ${ET}_i$ 客户$i$要求的最早到达时间 $i$ 客户点$i$ ${LT}_i$ 客户$i$要求的最晚到达时间 $j$ 客户点$j$ $S_i$ 客户$i$要求的卸货时间 $P$ $\{1,2,\cdots,\ P_t\} $ 车场编号$q_i$ 客户i 要求的货物需求量 $P_s$ 全部车场集合 $t_i$ 车辆到达客户$i$的时间 $P_t$ 总共有$P_t$个车场$P$ $M$ 车型编号 $M_s$ 全部车型集合$\{1,2,\cdots,\ M_t\}$ $Q_M$ 第$M$种车型的最大载重量 $H_{PMS}$ 车场$P$中车型$M$的全部车辆集合$\{1,2,\cdots,\ H_{PM}\}$ ${FU}_{Mij}$ 车型为$M$的车辆从客户$i$到客户$j$之间的耗油量 注: 综合燃油消耗模型中的其他相关参数设定参考文献 [25].  下载: 导出CSV
下载: 导出CSV
表 2 目标函数中的相关系数
Table 2 Coefficients in the object function
符号 数值 $C_{M1}$ 1.5 (元/km) $C_{M2}$ 300 ~ 800 (元/辆) $C_{M3}$ 7.6 (元/l) $C_{1}$ 15 (元/h) $C_{2}$ 20 (元/h)
下载: 导出CSV
表 3 主要参数与水平
Table 3 Main parameters and level
主要参数 水平设置 1 2 3 4 $\alpha$ 1.25 1.5 1.75 2.0 $\beta$ 10 1.5 2.0 2.5 $P_m$ 1.1 1.2 1.3 1.4 $W$ 500 1000 1500 2000
下载: 导出CSV
表 4 参数设置的正交表
Table 4 Orthogonal table of parameter settings
组合编号 水平设置 AVR (元) $\alpha$ $\beta$ $P_m$ $W$ 1 1 1 1 1 9677 2 1 2 2 2 9625 3 1 3 3 3 9613 4 1 4 4 4 9541 5 2 1 2 3 9745 6 2 2 1 4 9624 7 2 3 4 1 9602 8 2 4 3 2 9593 9 3 1 3 4 9836 10 3 2 4 3 9703 11 3 3 1 2 9654 12 3 4 2 1 9612 13 4 1 4 2 9865 14 4 2 3 1 9689 15 4 3 2 4 9656 16 4 4 1 3 9672
下载: 导出CSV
表 5 各参数不同水平下的平均响应值和影响力
Table 5 Average response values and influences table at different levels of each parameter
水平 水平设置 $\alpha$ $\beta$ $P_m$ $W$ 1 9614 9780 9656 9645 2 9641 9660 9659 9684 3 9701 9631 9683 9683 4 9720 9604 9677 9664 极差 106 176 27 39 影响力排名 2 1 4 3
下载: 导出CSV
表 6 4种不同车型相关参数设置
Table 6 Related parameter settings for four different vehicle types
车型
列表车型参数 载重量 (kg) 空车重量(kg) 平均速度(km/h) 固定费用(元) 最大承载货物数 (件) Type 1 200 1600 60 ~ 80 300 ~ 400 20 Type 2 500 2700 50 ~ 70 400 ~ 500 30 Type 3 600 3500 40 ~ 60 500 ~ 600 40 Type 4 800 5000 30 ~ 50 600 ~ 800 50
下载: 导出CSV
表 7 EACO_IBKA与其他算法对比结果
Table 7 Comparison results of EACO_IBKA with other algorithms
N_Pt EACO_IBKA EACO_KM EACO_NNA EACO1 DHACO ${ {T} }({{\rm{s}}} )$ 最优 平均 最差 标准差 最优 平均 最差 标准差 最优 平均 最差 标准差 最优 平均 最差 标准差 最优 平均 最差 标准差 48_2 11118 11800 12163 95 10745 11181 11579 97 11558 12080 12539 99 9650 10390 11026 87 10255 11068 11663 90 10 96_2 17483 18155 18549 183 18037 18379 19146 187 16768 17675 18229 190 15371 17009 17771 169 16011 17559 18161 174 19 144_2 24628 25435 26983 308 24880 25369 27201 314 25435 26710 27702 320 24366 25969 27419 318 24475 26884 28356 328 29 192_2 27522 28546 29649 411 28457 29482 30261 419 28758 29560 31019 428 28379 29838 30618 432 28524 30863 31665 445 38 240_2 31505 32699 34166 508 32517 33677 35235 518 32676 33723 35179 529 32722 34769 35906 534 33643 36475 37487 550 48 288_2 39217 41028 43326 592 40412 42363 44162 604 41179 42142 44696 616 41283 43164 44325 622 42606 43930 45137 641 58 360_2 53748 56268 58544 847 54672 57402 60199 864 55251 57847 59619 881 56276 58653 61938 890 56965 59409 62929 916 72 48_3 10767 11035 11572 83 10221 10827 11115 84 10995 11492 11929 93 9178 9883 10489 81 9754 10529 11095 83 14 96_3 16638 17278 17654 174 17066 17491 18222 182 15957 16821 17349 180 14627 16582 17912 191 15236 17186 18141 184 29 144_3 23443 24211 25685 293 23659 24149 25893 290 24211 25426 26371 302 23194 24720 26101 296 23297 25592 26993 305 43 192_3 26199 27175 28225 392 27090 28066 28826 399 27376 28140 29529 403 27016 28405 29147 407 27153 29381 30145 420 58 240_3 29992 31130 32527 484 30956 32061 33545 494 31108 32105 33491 499 31151 33101 34184 504 32029 34726 35690 519 72 288_3 37337 39062 41251 564 38476 40333 42047 575 39205 41123 42555 581 39305 41096 42202 587 40565 41826 42975 604 86 360_3 51176 53576 55744 806 52056 54656 57320 823 52608 55080 56768 831 53584 55848 58976 839 54240 56568 59920 864 108 48_4 10239 10617 11313 82 9943 10418 10886 84 10807 11144 11671 86 8939 9615 9883 78 9545 10051 10539 80 19 96_4 16062 16943 17257 166 16810 17146 17481 175 15871 16425 17434 160 16012 16907 17336 179 16391 16991 17496 177 38 144_4 22700 23723 25488 279 23650 24242 25187 291 23765 24990 25945 296 22747 24273 25602 288 22841 25114 26506 294 58 192_4 25690 26612 27737 373 26528 27235 27938 383 26846 27620 28988 391 26443 27896 28628 403 26623 28850 29614 411 77 240_4 29375 30447 31877 461 30317 31401 32874 473 30447 31411 32863 483 30545 32484 33502 511 31411 34401 34997 521 96 288_4 36519 38266 40433 537 37624 39493 41240 549 38365 39338 41737 560 38442 40278 41339 583 39692 40974 42135 595 115 360_4 50480 52904 55056 768 51344 53960 56608 786 51904 54392 56088 802 52088 55184 58312 833 53584 55904 59216 850 144 平均值 28183 29377 30724 400 28831 29968 31284 409 29100 30250 31510 416 28634 30289 31553 421 29278 31156 32422 431 —
下载: 导出CSV
表 8 HKMA与其他划分算法的对比结果
Table 8 Comparison results of HKMA and the other dividing algorithms
$ {{N}}\_ {{M}}_{{t}}$ EACO_HKMA EACO_RDA EACO_RAA EACO_KEW EACO2 TSA_RDA $ {T}({{{\rm{s}}}})$ 最优 平均 最差 最优 平均 最差 最优 平均 最差 最优 平均 最差 最优 平均 最差 最优 平均 最差 48_2 12801 13612 13901 13220 14646 15128 12467 13293 13998 12607 13317 13922 12218 13798 14202 13352 14792 15279 15 96_2 16299 16759 17342 17570 19461 20106 16238 17661 18591 16754 17704 18101 16543 17838 18777 17746 19656 20307 29 144_2 22061 23265 24089 23361 25860 26717 22390 23665 24721 22266 23533 24590 22838 23934 25215 23595 26119 26984 44 192_2 24847 25998 26933 25983 26905 28228 26000 27201 28372 26039 26918 28238 26520 27745 28939 26243 27174 28510 57 240_2 25958 27124 28797 26951 28002 29726 29253 30130 30753 29409 30076 30878 30131 31034 31976 27221 28282 30023 72 288_2 32225 33356 33838 33783 34713 36290 32740 35242 37189 32540 35156 37175 34050 36652 38677 34121 35060 36653 87 360_2 48344 50050 51763 50695 52088 54440 49129 52874 55793 48828 52743 53780 51094 54989 58025 51202 52609 54984 108 48_3 11896 12400 13111 12574 13919 14386 11755 11999 13312 11995 12658 13236 11520 12240 13999 12700 14058 14530 21 96_3 15777 15929 16997 16704 18494 19122 16011 16792 17680 15932 16839 17594 16171 16960 17857 16871 18679 19313 44 144_3 20965 21171 22661 22207 24587 25394 21291 22312 23490 21170 22366 23380 21717 22758 23960 22429 24833 25648 65 192_3 23624 24718 25597 24704 25570 26823 24714 25850 26974 24748 25588 26836 25455 26626 27783 24951 25826 27091 87 240_3 24680 25776 27367 25620 26616 28248 27804 28634 29235 27948 28582 29351 28916 29779 30404 25876 26882 28530 108 288_3 30621 31700 32158 32106 32984 34483 31111 33493 35335 30929 33414 35335 32667 35168 37102 32427 33314 34828 129 360_3 45933 47554 48245 48172 49502 51726 46691 50237 53019 47401 50118 51004 49026 52749 55670 48654 49997 52243 162 48_4 10755 10998 12257 11330 12533 12956 10700 11393 11985 10800 11402 11927 10999 11766 11999 11443 12658 13086 29 96_4 14214 14349 14672 15047 16655 17221 14422 15118 15927 14346 15171 15843 14566 15269 16086 15197 16822 17393 57 144_4 18878 19057 20506 19998 22039 22865 19165 20085 21148 19057 20140 21048 19548 20487 21571 20198 22360 23094 87 192_4 21273 22251 23043 22237 23018 24145 22257 23268 24281 22282 23034 24158 22925 23966 25009 22459 23248 24386 116 240_4 22215 23209 24642 23073 23966 25438 25035 25778 26316 25161 25735 26431 26036 26809 27369 23304 24206 25692 144 288_4 27563 28542 29950 28902 29689 31040 28012 30149 31812 27842 30088 31815 29413 31656 33403 29191 29986 31350 173 360_4 41350 42809 44034 43360 44558 46561 42028 45218 47722 41776 43111 45711 44129 47479 50108 43794 45004 47027 216 平均值 24407 25197 25970 25600 26948 28145 25201 26659 27983 25230 26652 27636 26023 27605 28944 25856 27217 28426 —
下载: 导出CSV
表 9 EACO_CD性能验证
Table 9 Performance verification of EACO_CD
$ {{N}}\_{{ P}}_{{t}}\_{{M}}_{{t}}$ EACO_CD (EACO_IBKA_HKMA) IACO_CD (IACO_NNA_SWA) IHGA ${ {T} }({ {{\rm{s}}} })$ 最优值 平均值 最差值 标准差 最优值 平均值 最差值 标准差 最优值 平均值 最差值 标准差 48_2_2 12145 12478 12859 232 12880 13212 13509 241 11632 11967 12227 220 15 96_2_2 16370 16526 16904 295 17800 18071 18381 272 15852 16011 16376 285 31 144_2_2 21010 21305 21704 324 24589 24825 25406 336 21049 21640 22154 348 51 192_2_2 23664 24760 25650 556 26040 27250 28218 576 24863 26010 26948 590 71 240_2_2 24722 25832 27426 588 26707 27903 29640 641 27444 28720 29947 692 96 288_2_2 30690 31768 32227 724 33772 34962 35457 803 35311 36550 37076 824 123 360_2_2 39903 41303 41906 951 43907 45448 46111 1059 45507 46098 47781 1197 162 48_3_2 12999 14064 14425 293 13656 14787 15372 336 12742 13802 14337 304 21 96_3_2 16883 17869 18993 358 18568 20115 20999 343 16800 18283 19011 363 48 144_3_2 21916 23728 24668 456 25647 27774 28874 539 23029 24921 25906 491 76 192_3_2 24257 25492 26408 668 26692 28059 29065 671 26688 28052 29053 746 109 240_3_2 24672 26558 28026 792 27884 30021 31675 740 28382 30554 32236 787 144 288_3_2 30258 31572 32860 907 34814 36319 37797 1017 35414 36956 38450 1092 183 360_3_2 39347 41061 42734 1141 43291 45187 47020 1263 47228 49291 51297 1389 243 48_3_3 12284 13225 13755 280 12830 13906 14446 322 12123 13253 13797 287 29 96_3_3 15867 17082 17860 388 17470 18911 19664 368 16514 17874 18584 478 62 144_3_3 20620 22321 23193 438 22488 24336 25294 490 24128 26136 27154 522 102 192_3_3 22816 23977 24832 631 25108 26383 27320 708 26242 27588 28567 743 145 240_3_3 24209 25982 27348 655 26693 28731 30318 770 27859 29995 31632 803 192 288_3_3 28458 29693 30892 828 32742 34157 35530 957 35582 37120 38622 1048 245 360_3_3 37006 38610 40166 1079 40722 42474 44186 1198 47081 49427 51523 1399 288 平均值 23814 25010 25945 599 26395 27754 28775 650 26737 28107 29175 696 —
下载: 导出CSV
-
[1] Dantzig G B, Ramser J H. The truck dispatching problem. Management Science, 1959, 6(1): 80−91 doi: 10.1287/mnsc.6.1.80 [2] Anbuudayasankar S P, Ganesh K, Mohapatra S. Models for Practical Routing Problems in Logistics. Cham: Springer, 2014. [3] Li H Q, Yuan J L, Lv T, Chang X Y. The two-echelon time-constrained vehicle routing problem in linehaul-delivery systems considering carbon dioxide emissions. Transportation Research Part D: Transport and Environment, 2016, 49: 231−245 doi: 10.1016/j.trd.2016.10.002 [4] 赵燕伟, 张景玲, 王万良. 物流配送的车辆路径优化方法. 北京: 科学出版社, 2014.Zhao Yan-Wei, Zhang Jing-Ling, Wang Wan-Liang. Vehicle Routing Optimization Methods for Logistics Distribution. Beijing: Science Press, 2014. [5] Sbihi A, Eglese R W. Combinatorial optimization and green logistics. 4OR, 2007, 5(2): 99−116 doi: 10.1007/s10288-007-0047-3 [6] Chen D S, Batson R G, Dang Y. Applied Integer Programming. Hoboken: John Wiley & Sons, 2010. [7] Jabir E, Panicker V V, Sridharan R. Design and development of a hybrid ant colony-variable neighbourhood search algorithm for a multi-depot green vehicle routing problem. Transportation Research Part D: Transport and Environment, 2017, 57: 422−457 doi: 10.1016/j.trd.2017.09.003 [8] Kaabachi I, Jriji D, Krichen S. An improved ant colony optimization for green multi-depot vehicle routing problem with time windows. In: Proceedings of the 18th IEEE/ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD). Kanazawa, Japan: IEEE, 2017. [9] Xiao Y Y, Konak A. The heterogeneous green vehicle routing and scheduling problem with time-varying traffic congestion. Transportation Research Part E: Logistics and Transportation Review, 2016, 88: 146−166 doi: 10.1016/j.tre.2016.01.011 [10] Kwon Y J, Choi Y J, Lee D H. Heterogeneous fixed fleet vehicle routing considering carbon emission. Transportation Research Part D: Transport and Environment, 2013, 23: 81−89 doi: 10.1016/j.trd.2013.04.001 [11] Geetha S, Vanathi P T, Poonthalir G. Metaheuristic approach for the multi-depot vehicle routing problem. Applied Artificial Intelligence, 2012, 26(9): 878−901 doi: 10.1080/08839514.2012.727344 [12] Geetha S, Poonthalir G, Vanathi P T. Nested particle swarm optimisation for multi-depot vehicle routing problem. International Journal of Operational Research, 2013, 16(3): 329−348 doi: 10.1504/IJOR.2013.052336 [13] Ho W, Ho G T S, Ji P, Lau H C W. A hybrid genetic algorithm for the multi-depot vehicle routing problem. Engineering Applications of Artificial Intelligence, 2008, 21(4): 548−557 doi: 10.1016/j.engappai.2007.06.001 [14] Wang Y, Assogba K, Liu Y, Ma X L, Xu M Z, Wang Y H. Two-echelon location-routing optimization with time windows based on customer clustering. Expert Systems With Applications, 2018, 104: 244−260 doi: 10.1016/j.eswa.2018.03.018 [15] Dondo R, Cerdá J. A cluster-based optimization approach for the multi-depot heterogeneous fleet vehicle routing problem with time windows. European Journal of Operational Research, 2007, 176(3): 1478−1507 doi: 10.1016/j.ejor.2004.07.077 [16] Tang Y L, Cai Y G, Yang Q J. Improved ant colony optimization for multi-depot heterogeneous vehicle routing problem with soft time windows. Journal of Southeast University (English Edition), 2015, 31(1): 94−99 [17] Dorigo M, Maniezzo V, Colorni A. Ant system: Optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 1996, 26(1): 29−41 doi: 10.1109/3477.484436 [18] 王素欣, 高利, 崔小光, 曹宏美. 多需求点车辆调度模型及其群体智能混合求解. 自动化学报, 2008, 34(1): 102−104Wang Su-Xin, Gao Li, Cui Xiao-Guang, Cao Hong-Mei. Study on multi-requirement points vehicle scheduling model and its swarm mix algorithm. Acta Automatica Sinica, 2008, 34(1): 102−104 [19] Lee C Y, Lee Z J, Lin S W, Ying K C. An enhanced ant colony optimization (EACO) applied to capacitated vehicle routing problem. Applied Intelligence, 2010, 32(1): 88−95 doi: 10.1007/s10489-008-0136-9 [20] Yu B, Yang Z Z. An ant colony optimization model: The period vehicle routing problem with time windows. Transportation Research Part E: Logistics and Transportation Review, 2011, 47(2): 166−181 doi: 10.1016/j.tre.2010.09.010 [21] Ding Q L, Hu X P, Sun L J, Wang Y Z. An improved ant colony optimization and its application to vehicle routing problem with time windows. Neurocomputing, 2012, 98: 101−107 doi: 10.1016/j.neucom.2011.09.040 [22] Yan F L. Autonomous vehicle routing problem solution based on artificial potential field with parallel ant colony optimization (ACO) algorithm. Pattern Recognition Letters, 2018, 116: 195−199 doi: 10.1016/j.patrec.2018.10.015 [23] 陈希琼, 胡大伟, 杨倩倩, 胡卉, 高扬. 多目标同时取送货车辆路径问题的改进蚁群算法. 控制理论与应用, 2018, 35(9): 1347−1356 doi: 10.7641/CTA.2018.80085Chen Xi-Qiong, Hu Da-Wei, Yang Qian-Qian, Hu Hui, Gao Yang. An improved ant colony algorithm for multi-objective vehicle routing problem with simultaneous pickup and delivery. Control Theory & Applications, 2018, 35(9): 1347−1356 doi: 10.7641/CTA.2018.80085 [24] Xu H T, Pu P, Duan F. Dynamic vehicle routing problems with enhanced ant colony optimization. Discrete Dynamics in Nature and Society, 2018, 2018: Article No. 1295485 [25] Demir E, Bektaš T, Laporte G. An adaptive large neighborhood search heuristic for the pollution-routing problem. European Journal of Operational Research, 2012, 223(2): 346−359 doi: 10.1016/j.ejor.2012.06.044 [26] Bektaš T, Gouveia L. Requiem for the Miller-Tucker-Zemlin subtour elimination constraints. European Journal of Operational Research, 2014, 236(3): 820−832 doi: 10.1016/j.ejor.2013.07.038 [27] Toth P, Vigo D. 车辆路径问题. 北京: 清华大学出版社, 2011.Toth P, Vigo D. The Vehicle Routing Problem. Beijing: Tsinghua University Press, 2011. [28] Wolsey L A. Integer Programming. New York: Wiley, 1998. [29] Schneider M, Stenger A, Goeke D. The electric vehicle-routing problem with time windows and recharging stations. Transportation Science, 2014, 48(4): 500−520 doi: 10.1287/trsc.2013.0490 [30] Gu S S. A polynomial time solvable algorithm to linearly constrained binary quadratic programming problems with Q being a tri-diagonal matrix. In: Proceedings of the 5th International Conference on Intelligent Control and Information Processing (ICCIP). Dalian, China: IEEE, 2011. [31] Meng X H, Li J, Zhou M C, Dai X Z, Dou J P. Population-based incremental learning algorithm for a serial colored traveling salesman problem. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(2): 277−288 doi: 10.1109/TSMC.2016.2591267 [32] Wang Y, Ma X L, Lao Y T, Wang Y H. A fuzzy-based customer clustering approach with hierarchical structure for logistics network optimization. Expert Systems With Applications, 2014, 41(2): 521−534 doi: 10.1016/j.eswa.2013.07.078 [33] Wang Y, Zhang J, Assogba K, Liu Y, Xu M Z, Wang Y H. Collaboration and transportation resource sharing in multiple centers vehicle routing optimization with delivery and pickup. Knowledge-Based Systems, 2018, 160: 296−310 doi: 10.1016/j.knosys.2018.07.024 [34] Wang B D, Miao Y W, Zhao H Y, Jin J, Chen Y Z. A biclustering-based method for market segmentation using customer pain points. Engineering Applications of Artificial Intelligence, 2016, 47: 101−109 doi: 10.1016/j.engappai.2015.06.005 [35] Ji J C, Pang W, Zhou C G, Han X, Wang Z. A fuzzy k-prototype clustering algorithm for mixed numeric and categorical data. Knowledge-Based Systems, 2012, 30: 129−135 doi: 10.1016/j.knosys.2012.01.006 [36] Wang Y, Ma X L, Liu M W, Gong K, Liu Y, Xu M Z, et al. Cooperation and profit allocation in two-echelon logistics joint distribution network optimization. Applied Soft Computing, 2017, 56: 143−157 doi: 10.1016/j.asoc.2017.02.025 [37] He R H, Xu W B, Sun J X, Zu B Q. Balanced k-means algorithm for partitioning areas in large-scale vehicle routing problem. In: Proceedings of the 3rd International Symposium on Intelligent Information Technology Application. Nanchang, China: IEEE, 2009. [38] 王东风, 孟丽. 粒子群优化算法的性能分析和参数选择. 自动化学报, 2016, 42(10): 1552−1561 doi: 10.16383/j.aas.2016.c150774Wang Dong-Feng, Meng Li. Performance analysis and parameter selection of PSO algorithms. Acta Automatica Sinica, 2016, 42(10): 1552−1561 doi: 10.16383/j.aas.2016.c150774 [39] Beasley J E. Route first―Cluster second methods for vehicle routing. Omega, 1983, 11(4): 403−408 doi: 10.1016/0305-0483(83)90033-6 [40] Gillett B E, Miller L R. A heuristic algorithm for the vehicle-dispatch problem. Operations Research, 1974, 22(2): 340−349 doi: 10.1287/opre.22.2.340 [41] Yu B, Yang Z Z, Yao B Z. An improved ant colony optimization for vehicle routing problem. European Journal of Operational Research, 2009, 196(1): 171−176 doi: 10.1016/j.ejor.2008.02.028 [42] Mladenović N, Hansen P. Variable neighborhood search. Computers & Operations Research, 1997, 24(11): 1097−1100 [43] 李进, 傅培华. 具有固定车辆数的多车型低碳路径问题及算法. 计算机集成制造系统, 2013, 19(6): 1351−1362 doi: 10.13196/j.cims.2013.06.189.lij.007Li Jin, Fu Pei-Hua. Heterogeneous fixed fleet low-carbon routing problem and algorithm. Computer Integrated Manufacturing Systems, 2013, 19(6): 1351−1362 doi: 10.13196/j.cims.2013.06.189.lij.007 -

 下载:
下载:



计量
- 文章访问数: 2863
- HTML全文浏览量: 338
- PDF下载量: 261
- 被引次数: 0
