

Nested-Pseudo Predictor Feedback Based Input Delay Compensation for Time-Delay Control Systems
-
摘要: 本文研究同时具有输入和状态时滞的控制系统的输入时滞补偿问题. 通过建立嵌套−伪预估器反馈方法预测系统未来的状态, 使得任意大但有界的输入时滞得到完全补偿. 不同于传统的预估器反馈利用开环系统预测系统未来的状态, 嵌套−伪预估器反馈则是利用闭环系统嵌套地预测系统未来的状态. 依据积分时滞系统的稳定性, 给出了保证闭环系统渐近稳定的充要条件. 最后, 采用数值仿真验证所提出方法的有效性.Abstract: This paper studies the input delay compensation of control systems with both state and input delays. A nested-pseudo predictor feedback is established to predict the future states such that the input delay that can be arbitrarily large yet bounded are compensated completely. Differently from the traditional predictor feedback which uses the open-loop system dynamics to predict the future state, nested-pseudo predictor feedback uses the closed-loop system dynamics to predict nestedly the future state. Necessary and sufficient conditions guaranteeing the stability of the closed-loop system are obtained in terms of the stability of integral delay systems. Finally, a numerical example is worked out to show the effectiveness of the proposed approach.
-
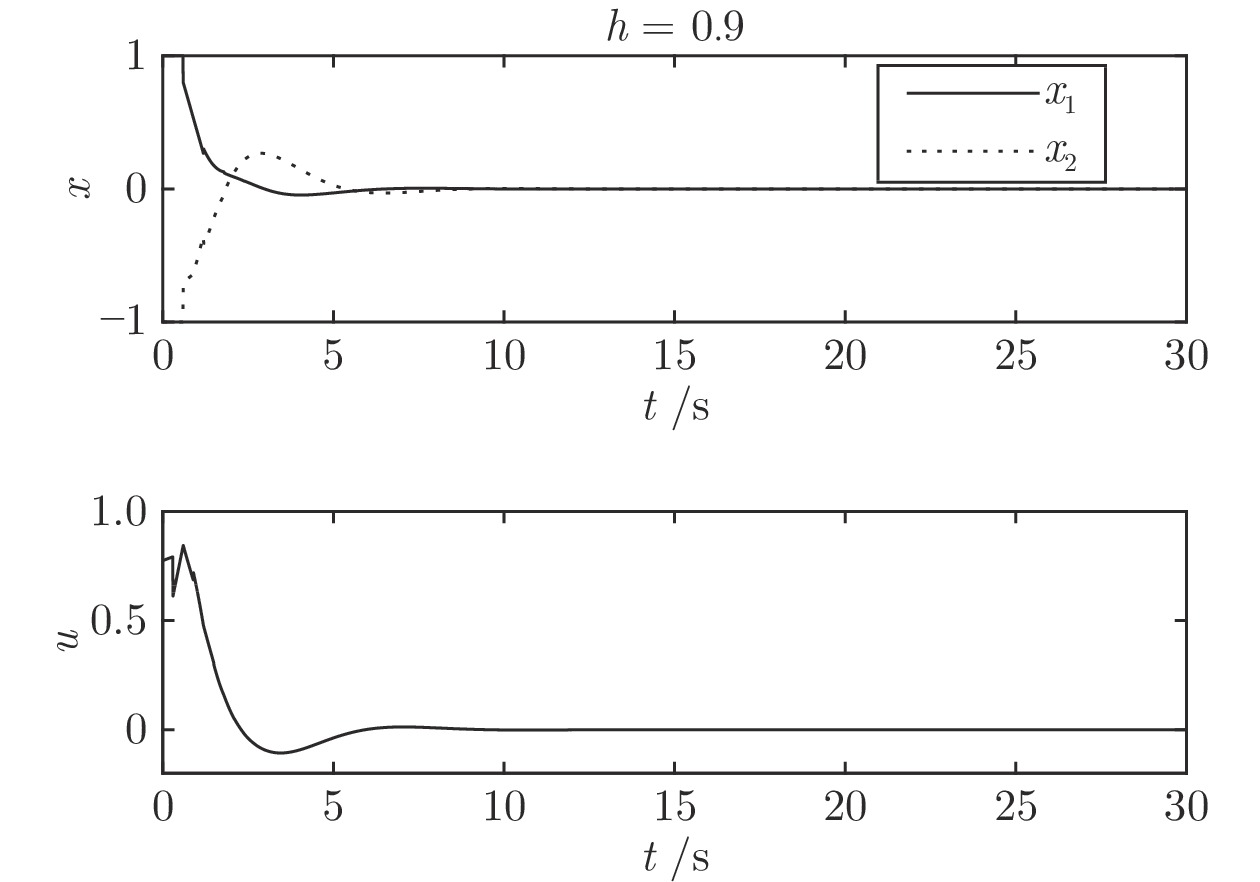
图 1 系统(30)和(31)组成闭环系统的状态轨迹和控制信号
Fig. 1 State trajectories and control signals for the closed-loop system consisting of (30) and (31)

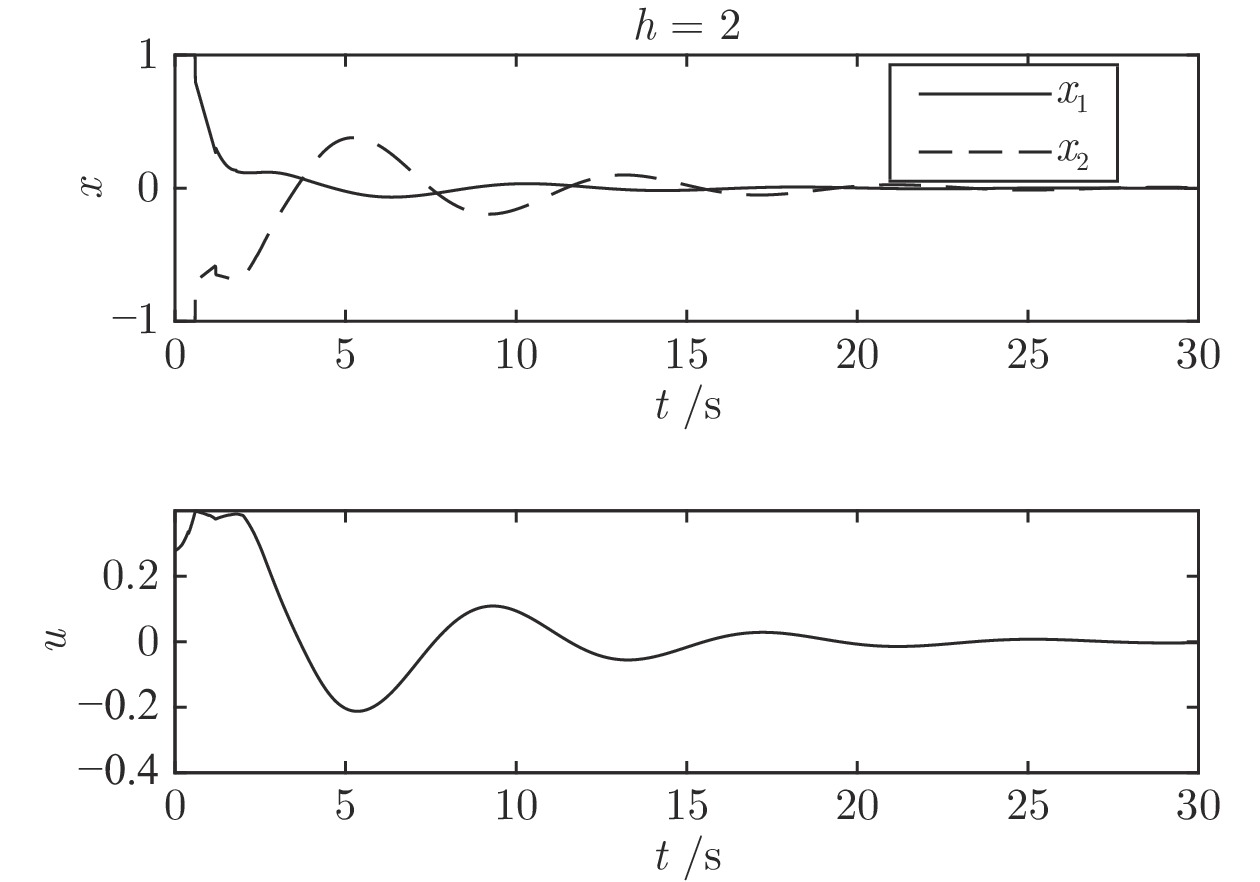
图 2 系统(30)和(32)组成闭环系统的状态轨迹和控制信号
Fig. 2 State trajectories and control signals for the closed-loop system consisting of (30) and (32)
-
[1] Xu S, Lam J, Zou Y. New results on delay-dependent robust H∞ control for systems with time-varying delays.Automatica, 2006, 42(2): 343-348 doi: 10.1016/j.automatica.2005.09.013 [2] Wu Z G, Shi P, Su H, Chu J. Sampled-data synchronization of chaotic Lur’e systems with time delays. IEEE transactions on Neural Networks and Learning Systems, 2013, 24(3): 410-421 doi: 10.1109/TNNLS.2012.2236356 [3] Zhang B, Lam J, Xu S. Relaxed results on reachable set estimation of time-delay systems with bounded peak inputs. International Journal of Robust and Nonlinear Control, 2016, 26(9): 1994-2007. doi: 10.1002/rnc.3395 [4] 何博, 方勇纯, 卢彪. 针对输入时滞的桥式起重机鲁棒控制. 自动化学报, 2019, 45(6): 1065-1073He B, Fang Y C, Lu B. Robust control for an overhead crane with input delay. Acta Automatica Sinica, 2019, 45(6): 1065-1073 [5] 周笔锋, 罗毅平. 时滞分布参数系统中和控制器设计. 自动化学报, 2018, 44(12): 2222-2227Zhou B F, Luo Y P. Neutralization control of distributed parameter systems with delay. Acta Automatica Sinica, 2018, 44(12): 2222-2227 [6] 徐君, 张国良, 曾静, 孙巧, 羊帆. 具有时延和切换拓扑的高阶离散时间多智能体系统鲁棒保性能一致性. 自动化学报, 2019, 45(2): 360-373Xu J, Zhang G L, Zeng J, Sun Q, Yang F. Robust guaranteed cost consensus for high-order discrete-time multi-agent systems with switching topologies and time delays. Acta Automatica Sinica, 2019, 45(2): 360-373 [7] Wu M, He Y, She J H, Liu G P. Delay-dependent criteria for robust stability of time-varying delay systems.Automatica, 2004, 40(8): 1435-1439 doi: 10.1016/j.automatica.2004.03.004 [8] Sun X M, Wang W. Integral input-to-state stability for hybrid delayed systems with unstable continuous dynamics. Automatica, 2012, 48(9): 2359-2364 doi: 10.1016/j.automatica.2012.06.056 [9] Chen W H, Zheng W X. Exponential stability of nonlinear time-delay systems with delayed impulse effects. Automatica, 2011, 47(5): 1075-1083 doi: 10.1016/j.automatica.2011.02.031 [10] Mazenc F, Malisoff M. Stabilization and robustness analysis for time-varying systems with time-varying delays using a sequential subpredictors approach. Automatica, 2017, 82: 118-127 doi: 10.1016/j.automatica.2017.04.020 [11] Liu K Z, Sun X M, Krstic M. Distributed predictor-based stabilization of continuous interconnected systems with input delays. Automatica, 2018, 91: 69-78 doi: 10.1016/j.automatica.2018.01.030 [12] Li X, Song S. Stabilization of delay systems: delay-dependent impulsive control. IEEE Transactions on Automatic Control, 2016, 62(1): 406-411 [13] Cacace F, Germani A. Output feedback control of linear systems with input, state and output delays by chains of predictors. Automatica, 2017, 85: 455-461 doi: 10.1016/j.automatica.2017.08.013 [14] Liu X, Zhang, K. Input-to-state stability of time-delay systems with delay-dependent impulses, IEEE Transactions on Automatic Control, 2020, 65(4): 1676-1682. doi: 10.1109/TAC.2019.2930239 [15] Chen W H, Ruan Z, Zheng W X. Stability and L2-gain analysis for linear time-delay systems with delayed impulses: an augmentation-based switching impulse approach, IEEE Transactions on Automatic Control, 2019, 64(10): 4209-4216. doi: 10.1109/TAC.2019.2893149 [16] Li X, Song S, Wu J. Exponential stability of nonlinear systems with delayed impulses and applications, IEEE Transactions on Automatic Control, 2019, 64(10): 4024-4034. doi: 10.1109/TAC.2019.2905271 [17] Cai T, Cheng P. Exponential stability theorems for discrete-time impulsive stochastic systems with delayed impulses, Journal of the Franklin Institute, 2020, 357(2): 1253-1279. doi: 10.1016/j.jfranklin.2019.12.005 [18] Hu W, Zhu Q. Stability analysis of impulsive stochastic delayed differential systems with unbounded delays, Systems Control & Letters, 2020, 136: 104606. [19] Juarez L, Mondies, Kharitonov V L. Dynamic predictor for systems with state and input delay: A time-domain robust stability analysis, International Journal of Robust and Nonlinear Control, 2020, 30(6): 2204-2218. doi: 10.1002/rnc.4879 [20] Sun H, Sun J, Chen J. Stability of linear systems with sawtooth input delay and predictor-based controller, Automatica, 2020, 117: 108949. doi: 10.1016/j.automatica.2020.108949 [21] Shi C, Vong S. Finite-time stability for discrete-time systems with time-varying delay and nonlinear perturbations by weighted inequalities, Journal of the Franklin Institute, 2020, 357(1): 294-313. doi: 10.1016/j.jfranklin.2019.09.028 [22] Zhang X, Zhao N, Shi P. Necessary conditions of exponential stability for a class of linear neutral-type time-delay systems, International Journal of Control, 2019, 92(6): 1289-1297. doi: 10.1080/00207179.2017.1390259 [23] Smith O J M. A controller to overcome dead time. ISA Journal, 1959, 6(2): 28-33 [24] Bekiaris-Liberis N, Krstic M. Predictor-feedback stabilization of multi-input nonlinear systems. IEEE Transactions on Automatic Control, 2016, 62(2): 516-531 [25] Xia Y, Liu G P, Fu M, Rees D. Predictive control of networked systems with random delay and data dropout. IET Control Theory & Applications, 2009, 3(11): 1476-1486 [26] Manitius A Z, Olbrot A W. Finite spectrum assignment problem for systems with delays. IEEE Transactions on Automatic Control, 1979, 24: 541-553 doi: 10.1109/TAC.1979.1102124 [27] Zhou B. Pseudo-predictor feedback stabilization of linear systems with time-varying input delays. Automatica, 2014, 50(11): 2861-2871 doi: 10.1016/j.automatica.2014.08.036 [28] Liu Q, Zhou B. Regulation of linear systems with both pointwise and distributed input delays by memoryless feedback. Journal of the Franklin Institute, 2019, 356(10): 5172-5192 doi: 10.1016/j.jfranklin.2018.12.032 [29] Zhou B, Liu Q, Michiels W. Design of pseudo-predictor feedback for neutral-type linear systems with both state and input delays. Automatica, 2019, 109: 108502. doi: 10.1016/j.automatica.2019.108502 [30] Zhou B, Lin Z, Duan G R. Truncated predictor feedback for linear systems with long time-varying input delay. Automatica, 2012, 48(10): 2387-2399 doi: 10.1016/j.automatica.2012.06.032 [31] Zhou B. Input delay compensation of linear systems with both state and input delays by nested prediction. Automatica, 2014, 50(5): 1434-1443 doi: 10.1016/j.automatica.2014.03.010 [32] Zhou B, Liu Q. Input delay compensation for neutral type time-delay systems. Automatica, 2017, 78: 309-319 doi: 10.1016/j.automatica.2016.12.015 [33] Kharitonov V L. An extension of the prediction scheme to the case of systems with both input and state delay. Automatica, 2014, 50(1): 211-217 doi: 10.1016/j.automatica.2013.09.042 [34] Kharitonov V L. Predictor based stabilization of neutral type systems with input delay. Automatica, 2015, 52: 125-134 doi: 10.1016/j.automatica.2014.11.005 [35] Fiagbedzi Y A, Pearson A E. Feedback stabilization of linear autonomous time lag systems. IEEE Transactions on Automatic Control, 1986, 31(9): 847-855 doi: 10.1109/TAC.1986.1104417 [36] Van Assche V, Dambrine M, Lafay J F, Richard J P. Some problems arising in the implementation of distributed-delay control laws. In: Proceedings of 38th IEEE Conference on Decision and Control, 1999, 4668−4672 [37] Zhou B, Liu Q. On nested predictor feedback for linear systems with both state and input delays, In: Proceedings of the 12th World Congress on Intelligent Control and Automation, IEEE, 2016, 2382−2387 [38] Zhou B, Li Z Y. Stability analysis of integral delay systems with multiple delays, IEEE Transactions on Automatic Control, 2016, 61(1): 188-193 doi: 10.1109/TAC.2015.2426312 [39] Han Q L. A descriptor system approach to robust stability of uncertain neutral systems with discrete and distributed delays, Automatica, 2004, 40(10): 1791-1796 doi: 10.1016/j.automatica.2004.05.002 -

 下载:
下载:

图(3)
计量
- 文章访问数: 1211
- HTML全文浏览量: 214
- PDF下载量: 191
- 被引次数: 0
