

-
摘要: 为了控制机器人完成复杂的多臂协作任务, 提出了一种基于动态时间规整−高斯混合模型(Dynamic time warping-Gaussian mixture model, DTW-GMM)的机器人多机械臂多任务协同策略. 首先, 针对机器人示教时轨迹时间长短往往存在较大差异的问题, 采用动态时间规整方法来统一时间的变化; 其次, 基于动态时间规整的多机械臂示教轨迹, 采用高斯混合模型对轨迹的特征进行提取, 并以某一机械臂的位置空间矢量作为查询向量, 基于高斯混合回归泛化输出其余机械臂的执行轨迹; 最后, 在Pepper仿人机器人平台上验证了所提出的多机械臂协同策略, 基于DTW-GMM算法控制机器人完成了双臂协作搬运任务和汉字轨迹的书写任务. 提出的基于DTW-GMM算法的多任务协同策略简单有效, 可以利用反馈信息实时协调各机械臂的任务, 在线生成平滑的协同轨迹, 控制机器人完成复杂的协作操作.Abstract: To control robot to complete complex multi-arm cooperation tasks, a multi-task collaborative strategy based on dynamic time warping-Gaussian mixture model (DTW-GMM) is proposed in this paper. Firstly, in view of the problem that demonstration trajectories are shown to be largely different in the aspects of lasting time, the amic time warping algorithm is adopted to unify the variation of the time. Secondly, after the multi-arm demonstration trajectories are aligned by amic time warping algorithm, the Gaussian mixture model is used to extract the common features. And using the position space vector of a manipulator as the query vector, the Gaussian mixture regression algorithm is adopted to generically output the remaining manipulators' trajectory; Finally, the multi-task collaborative strategy proposed was verified on Pepper platform. Tasks for dual-arm to collaboratively move basket and write the Chinese character are completed based on the DTW-GMM algorithm. The multi-task collaborative strategy based on the DTW-GMM method proposed in this paper is effective. The feedback information can be introduced to coordinate the robot arms' task in real time, and the generated coordinated trajectories are smooth, which can control the robot to complete complex cooperative operations.
-
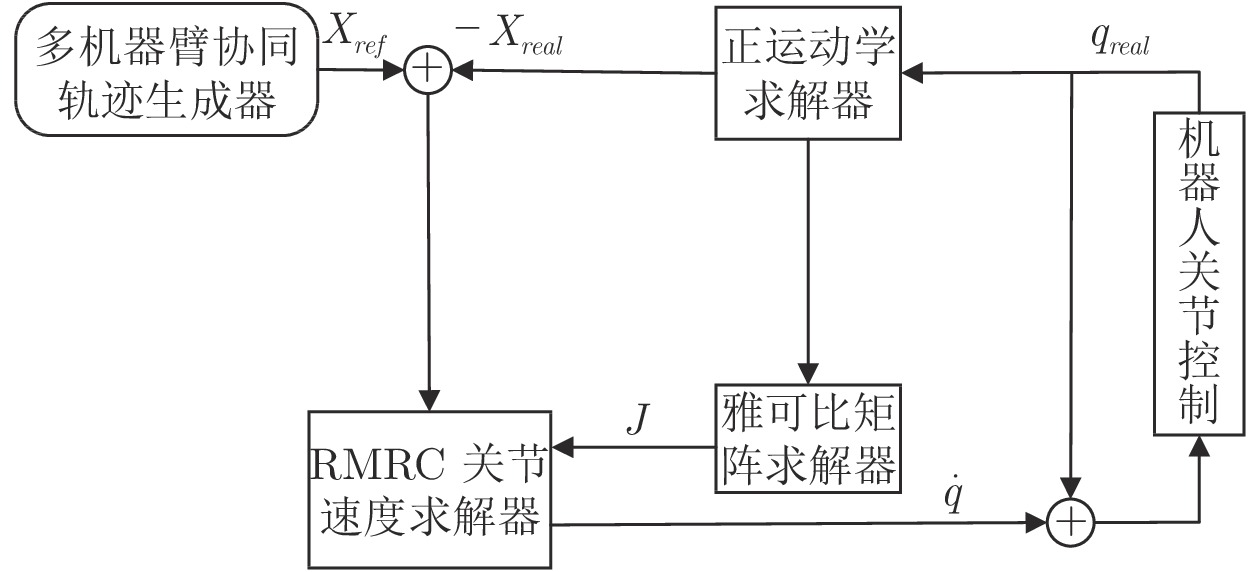
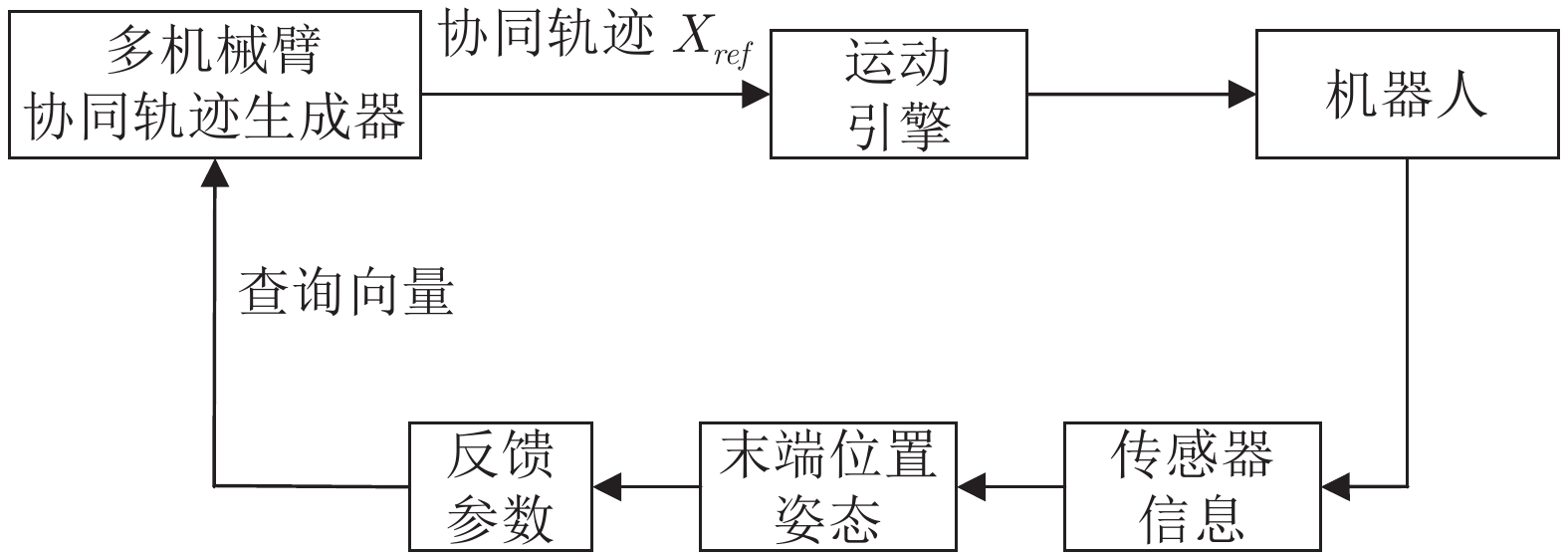
图 6 基于微分逆运动学的机器人运动控制引擎设计框图
Fig. 6 Block diagram of the motion control engine based on differential inverse kinematics
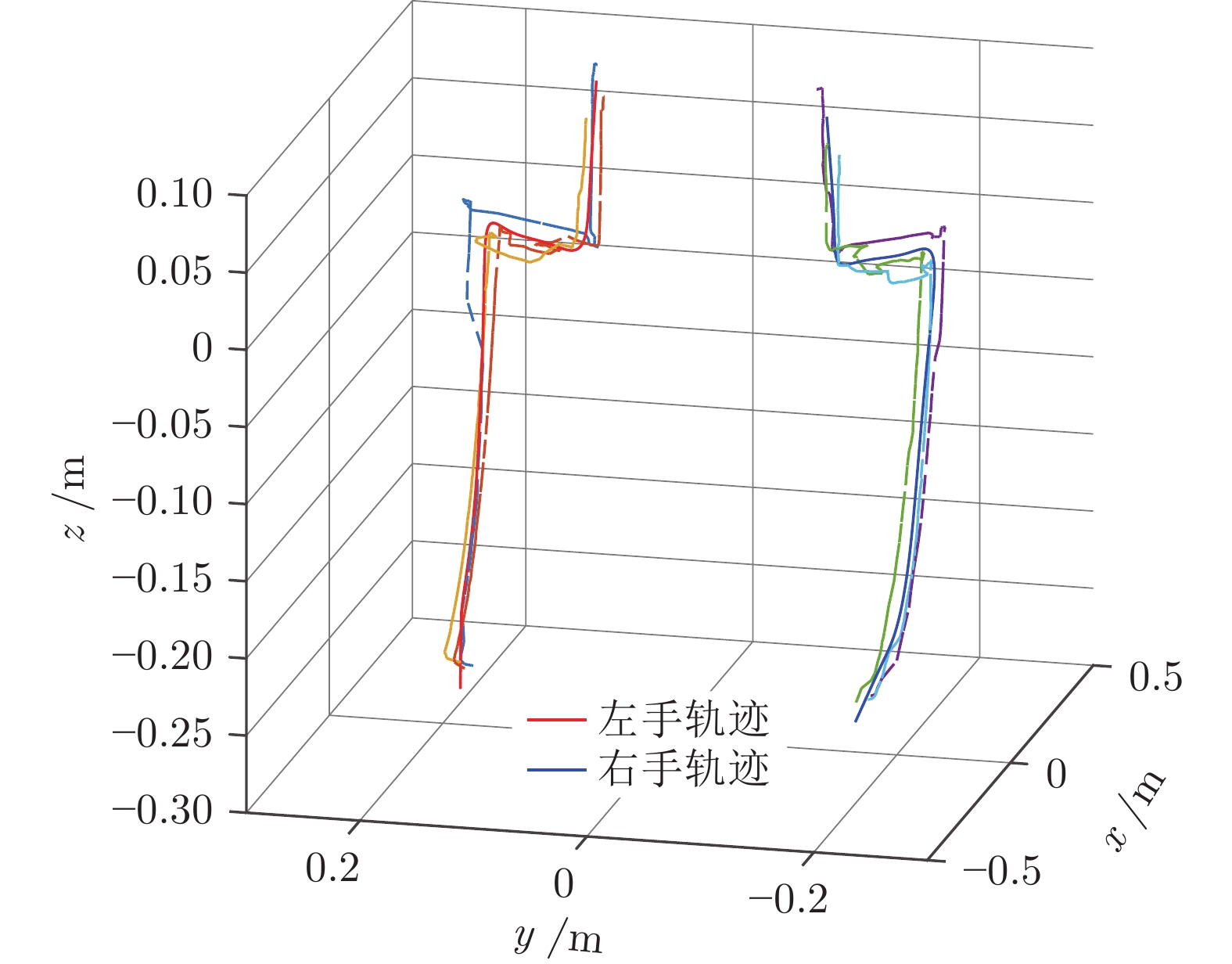
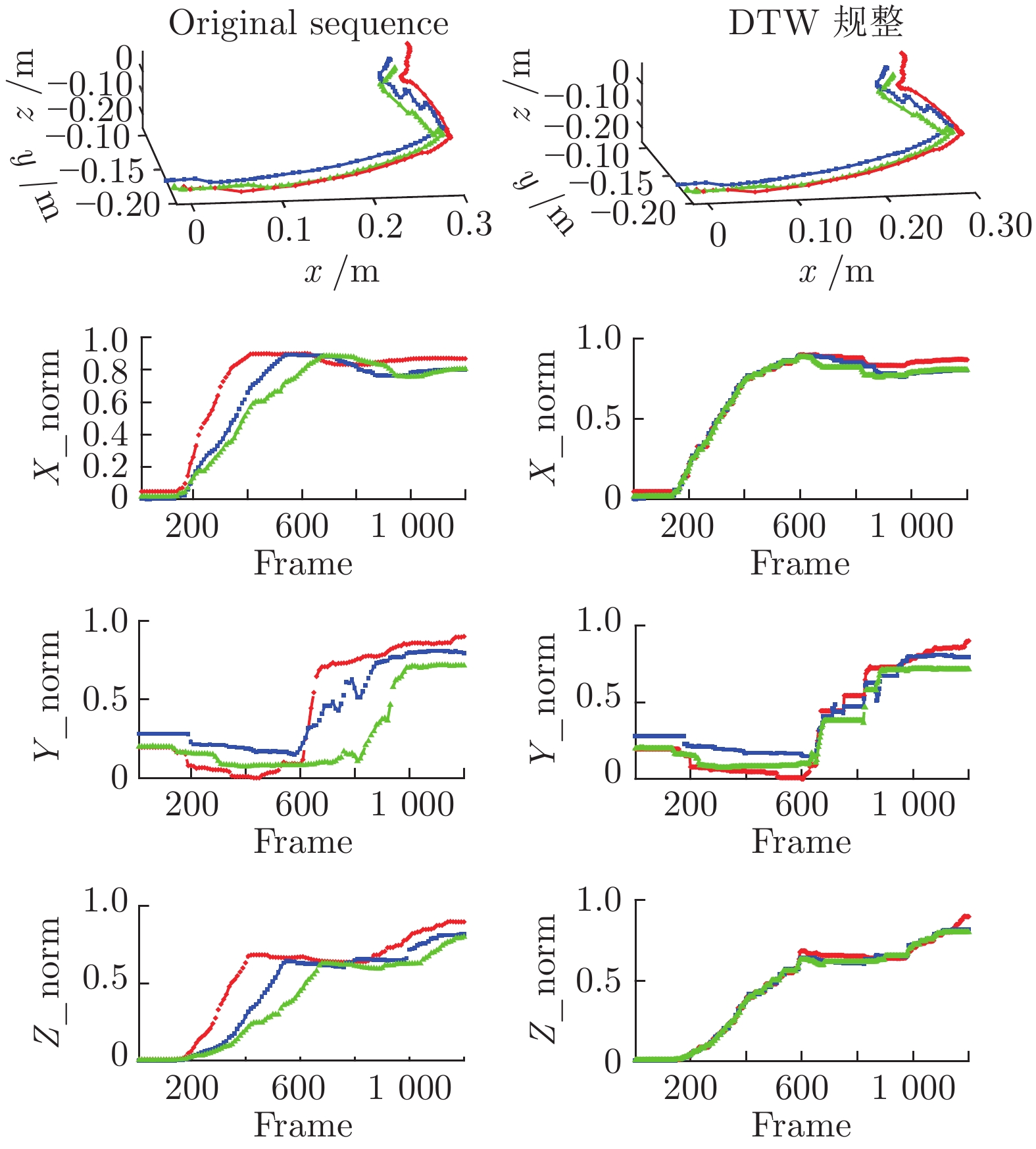
图 12 搬运实验左右手臂轨迹泛化输出
Fig. 12 Generalized dual-arm trajectory output in moving experiment
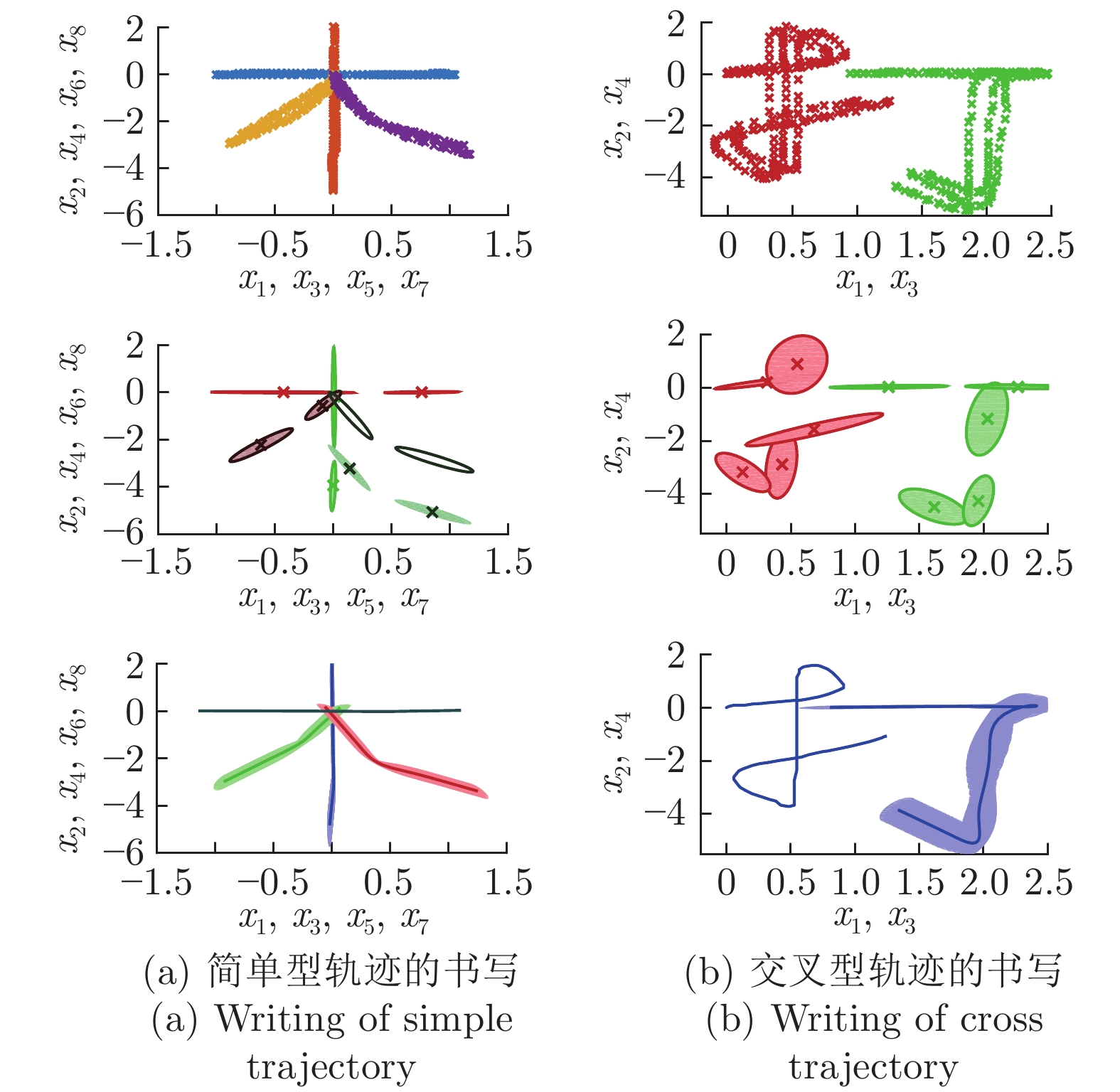
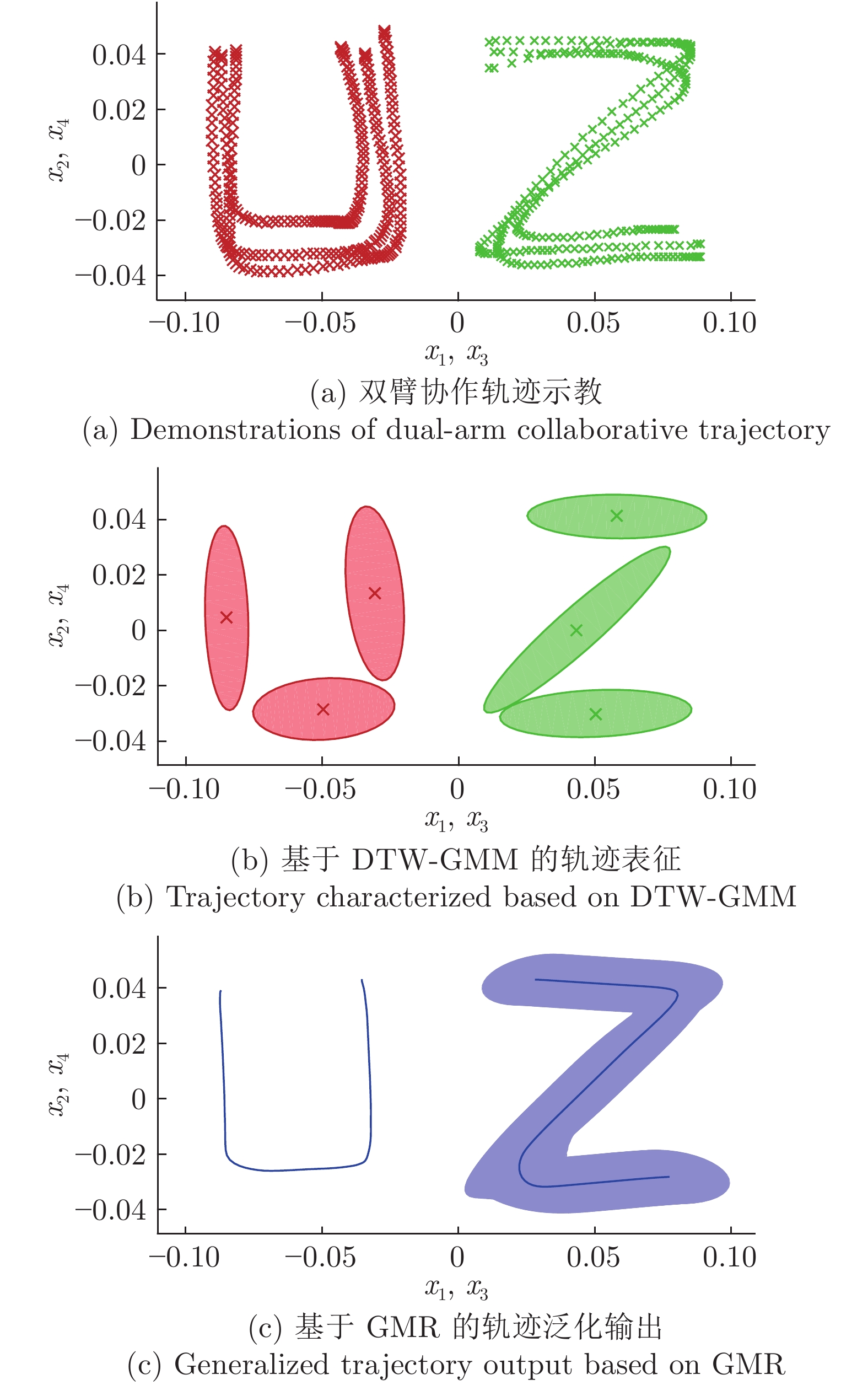
图 14 基于DTW-GMM算法的汉字轨迹书写
Fig. 14 Chinese character trajectory generation based on DTW-GMM algorithm
表 1 算法的时间复杂度
Table 1 Time complexity of algorithms
轨迹规划算法 时间复杂度 DP ${n_x} {n_y}$ GCTW $2dl{{m} } + 8{{ {m^3} } }$  下载: 导出CSV
下载: 导出CSV
表 2 DTW-GMM算法参数设置
Table 2 Parameter setting of the DTW-GMM algorithm
参数 参数值 $\delta$ $1 \times {10^{{\rm{ - 10}}}}$ ${i_{\max }}$ 10000 $\lambda$ 0.0001
下载: 导出CSV
表 3 GMM表征协方差矩阵表
Table 3 Covariance matrix of GMM algorithm
变量 t x y z t 1 0.0814 −0.0074 0.0280 x 0.0814 1 −0.0003 0.0010 y −0.0074 −0.0003 1 −0.0001 z 0.0280 0.0010 −0.0001 1
下载: 导出CSV
表 4 DTW-GMM表征协方差矩阵表
Table 4 Covariance matrix of DTW-GMM algorithm
变量 t x y z t 1 0.0078 −0.0063 0.0122 x 0.0078 1 −0.0001 0.0002 y −0.0063 −0.0001 1 0.0001 z 0.0122 0.0010 0.0001 1
下载: 导出CSV
-
[1] Kumar R, Berkelman P, Gupta P, Barnes A, Jensen P S, Whitcomb L L, et al. Preliminary experiments in cooperative human/robot force control for robot assisted microsurgical manipulation. In: Proceedings of the IEEE International Conference on Robotics and Automation. New York, USA: IEEE, 2000. 610−617 [2] Yan Y, Tang Z. Control architecture for autonomous multi-robot system: Survey and analysis. In: Proceedings of the International Conference on Intelligent Computation Technology and Automation. New York, USA: 2009. 376−379 [3] Zhi Y, Jouandeau N, Ali A. A survey and analysis of multi-robot coordination. International Journal of Advanced Robotic Systems, 2013, 10(1): 1-18 doi: 10.5772/52938 [4] Lim J, Chyung D H. On a control scheme for two cooperating robot arms. In: Proceedings of the IEEE Conference on Decision and Control. New York, USA: 1985. 334−337 [5] Ortenzi D, Muthusamy R, Freddi A, et al. Dual-arm cooperative manipulation under joint limit constraints. Robotics and Autonomous Systems, 2018, 99(1): 110-120 [6] Ramirez-Alpizar I G, Harada K, Yoshida E. Human-based framework for the assembly of elastic objects by a dual-arm robot. ROBOMECH Journal, 2017, 4(1): 20-30 doi: 10.1186/s40648-017-0088-0 [7] Tuan L A, Joo Y H, Duong P X, et al. Parameter estimator integrated-sliding mode control of dual arm robots. International Journal of Control, Automation and Systems, 2017, 15(6): 2754-2763 doi: 10.1007/s12555-017-0018-1 [8] Pastor P, Hoffmann H, Asfour T, Schaal S. Learning and generalization of motor skills by learning from demonstration. In: Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway, USA: 2009. 763−768 [9] Kober J, Mülling K, Kroemer O, Lampert, C H, Schölkopf B, Peters J. Movement templates for learning of hitting and batting. In: Proceedings of the IEEE International Conference on Robotics and Automation. Alaska, USA: 2010. 853−858 [10] Li C, Yang C, Ju Z, et al. An enhanced teaching interface for a robot using DMP and GMR. International Journal of Intelligent Robotics and Applications, 2018, 2(1): 110-121 doi: 10.1007/s41315-018-0046-x [11] Zhao T, Deng M, Li Z, Hu Y. Cooperative manipulation for a mobile dual-arm robot using sequences of dynamic movement primitives. IEEE Transactions on Cognitive and Developmental Systems, to be published [12] 刘成菊, 耿烷东, 张长柱, 陈启军. 基于自学习中枢模式发生器的仿人机器人适应性行走控制. 自动化学报, 2021, 47(9): 2170− 2181Liu Cheng-Ju, Geng Wan-Dong, Zhang Chang-Zhu, Chen Qi-Jun. Adaptive locomotion control of humanoid robot based on self-learning CPG. Acta Automatica Sinica, 2021, 47 (9): 2170− 2181 [13] Khansari-Zadeh S M, Billard A. Learning stable nonlinear dynamical systems with Gaussian mixture models. IEEE Transactions on Robotics, 2011, 27(5): 943-957 doi: 10.1109/TRO.2011.2159412 [14] Hewitt A, Yang C G, Li Y, Cui R. DMP and GMR based teaching by demonstration for a KUKA LBR robot. In: Proceedings of the IEEE International Conference on Automation and Computing. Piscataway, USA: 2017. [15] Gribovskaya E, Khansari-Zadeh S M, Billard A. Learning non-linear multivariate dynamics of motion in robotic manipulators. International Journal of Robotics Research, 2011, 30(1): 80-117 doi: 10.1177/0278364910376251 [16] Chatzis S P, Korkinof D, Demiris Y. A quantum-statistical approach toward robot learning by demonstration. IEEE Transactions on Robotics, 2012, 28(6): 1371-1381 doi: 10.1109/TRO.2012.2203055 [17] Calinon S, Li Z B, Alizadeh T, Tsagarakis N G, Caldwell D G. Statistical dynamical systems for skills acquisition in humanoids. In: Proceedings of the IEEE-RAS International Conference on Humanoid Robots. Piscataway, USA: IEEE, 2012. 323−329 [18] Kim S, Gribovskaya E, Billard A. Learning motion dynamics to catch a moving object. In: Proceedings of the IEEE-RAS International Conference on Humanoid Robots. Piscataway, USA: 2010. 106−111 [19] Koc O, Maeda G, Peters J. Online optimal trajectory generation for robot table tennis. Robotics and Autonomous Systems, 2018, 105(1): 121-137 [20] Rabiner L, Juang B H. Fundamentals of Speech Recognition. Beijing: Tsinghua University Press, 1999. 200−232 [21] Zhou F, Torre F D L. Generalized canonical time warping. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(2): 279-294 doi: 10.1109/TPAMI.2015.2414429 [22] Zhou F, Torre F D L. Generalized time warping for Multi-modal alignment of human motion. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York, USA: 2012. 1282−1289 [23] Biship C M. Pattern Recognition and Machine Learning (Information Science and Statistics). New York: Springer-Verlag, 2007. 440−477 [24] Wu Y C. Gaussian mixture model. Journal of Neuroscience Methods, 2005, 182(1): 110-122 [25] Sekaran K, Chandana P, Krishna N M, Kadry S. Deep learning convolutional neural network (CNN) with Gaussian mixture model for predicting pancreatic cancer. Multimedia Tools and Applications, 2020, 79 (15): 10233-102 [26] Akaike H. A new look at the statistical model identification. IEEE Transactions on Automatic Control, 1974, 19(6): 716-723 doi: 10.1109/TAC.1974.1100705 [27] 田彦涛, 孙中波, 李宏扬, 王静. 动态双足机器人的控制与优化研究进展. 自动化学报, 2016, 42(8): 1142-1157Tian Yan-Tao, Sun Zhong-Bo, Li Hong-Yang, Wang Jing. A review of optimal and control strategies for dynamic walking bipedal robots. Acta Automatica Sinica, 2016, 42(8): 1142-1157 [28] Chopra N, Spong M W. On synchronization of Kuramoto oscillators. In: Proceedings of the 44th IEEE Conference on Decision and Control. Seville, Spain: 2005. 3916−3922 [29] Chiaverini S. Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators. IEEE Transactions on Robotics and Automation, 1997, 13(3): 398-410 doi: 10.1109/70.585902 [30] Xu S, Hao J, Lau F C M, et al. Computationally evaluating and reproducing the beauty of chinese calligraphy. IEEE Intelligent Systems, 2012, 27(3): 63-72 doi: 10.1109/MIS.2012.46 [31] Kulvicius T, Ning K J, Tamosiunaite M, et al. Joining movement sequences: modified dynamic movement primitives for robotics applications exemplified on handwriting. IEEE Transactions on Robotics, 2012, 28(1): 145-157 doi: 10.1109/TRO.2011.2163863 [32] Sun Y, Qian H, Xu Y. Robot learns Chinese calligraphy from demonstrations. In: Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: 2014. 4408−4413 [33] Chao F, Huang Y, Zhang X, et al. A robot calligraphy system: from simple to complex writing by human gestures. IEEE Transactions on Human-Machine Systems, 2016, 59(1): 1-14 [34] Chao F, Huang Y, Lin C M, et al. Use of automatic Chinese character decomposition and human gestures for Chinese calligraphy robots. IEEE Transactions on Human-Machine Systems, 2019, 49(1): 47-58 doi: 10.1109/THMS.2018.2882485 -

 下载:
下载:






计量
- 文章访问数: 1680
- HTML全文浏览量: 560
- PDF下载量: 428
- 被引次数: 0
