

Fuzzy Adaptive Fixed-time Quantized Feedback Control for a Class of Nonlinear Systems
-
摘要: 研究了一类严格反馈不确定非线性系统的模糊自适应实际固定时间量化反馈控制问题. 基于李雅普诺夫有限时间稳定理论、自适应模糊控制理论及反演控制算法, 提出了一种非线性系统模糊自适应实际固定时间量化反馈跟踪控制方案. 所设计的控制方案能够保证闭环系统的输出跟踪误差在固定时间内收敛于原点的一个充分小邻域内, 且闭环系统内所有信号均有界. 最后, 数值示例验证了设计方案的有效性.Abstract: The problem of fuzzy adaptive practical fixed-time quantized feedback control for a class of strict-feedback nonlinear systems is investigated. Based on the Lyapunov finite-time stability theory, adaptive fuzzy control theory and backstepping algorithm, a fuzzy adaptive practical fixed-time quantized feedback tracking controller is developed, which ensures that the output tracking error converges to a small neighborhood of the origin in a fixed period of time and all the signals in the closed-loop system are bounded. Finally, a numerical example demonstrates the effectiveness of the proposed method.
-
量化控制问题一直以来受到很多学者的广泛关注, 作为网络控制中不可或缺的重要环节, 旨在通过量化器把连续信号转换为在有限集中取值的分段信号. 尤其随着数字设备性能的提高及网络化系统的应用和发展, 量化控制已然成为解决网络化控制问题最有效的方法之一.
近年来, 非线性系统的量化控制问题成为了一个新的研究热点[1]. 文献[2]针对一类非线性系统, 提出了一种对数量化反馈控制器设计方法. 文献[3]探讨了一类非线性离散系统的量化反馈控制问题, 利用具有可数个固定控制输入的方法, 解决了用“可数”去镇定“不可数”问题. 在文献[4]中, 基于Lyapunov稳定性理论和线性矩阵不等式研究了包含均匀量化器的非线性系统的一致有界稳定问题. 文献[5-6]针对具有量化输入的非线性系统, 研究了自适应控制问题.
在工程实践中, 系统的暂态性能是非常重要的. 一般来说, 为了提高生产效率, 要求系统满足一定的快速性. 如调节时间不能太短, 容易造成系统机械冲击, 影响设备使用寿命; 反之, 调节时间也不易过长, 影响生产效率. 固定时间控制是一种改善系统暂态性能的有效控制策, 保证系统具有快速收敛性的同时, 收敛时间存在确定上界, 且与系统初始状态无关. 文献[7]在最早的研究中首次提出了固定时间稳定的概念. 基于此, 文献[8-9]研究了非奇异固定时间控制问题, 给出了固定时间收敛控制器的设计方法. 文献[10]针对一类具有模型不确定性和外部扰动的时变非线性系统, 研究了固定时间收敛特性的终端滑模控制问题. 文献[11]研究了具有输出受限多输入多输出非线性系统的自适应固定时间控制问题. 当前, 随着对模糊控制/神经网络技术研究的不断深入, 非线性系统自适应模糊控制和神经网络控制相关成果不断涌现, 尤其利用反演控制算法, 设计了很多不同的自适应控制算法解决非线性系统控制问题[12-15].
上述文献提出的方法有效地解决了某些特定非线性系统控制问题, 然而针对非线性系统的模糊自适应控制尚有研究空间. 例如, 针对非线性系统的模糊自适应固定时间量化反馈控制, 成果不多. 因此, 受上述文献启发, 本文将固定时间控制、量化反馈控制及模糊控制等相结合, 基于李雅普诺夫有限时间稳定理论和反演控制算法, 研究具有迟滞量化器的非线性系统实际固定时间量化反馈控制问题. 拟解决如下问题: 1) 针对一类严格反馈不确定非线性系统, 提出一种使系统实际固定时间稳定的控制策略, 能够保证系统的跟踪误差在固定时间内收敛于原点的一个很小邻域内, 且收敛时间与系统初始状态无关; 2) 针对具有迟滞量化器的非线性系统, 利用反演控制算法, 基于李雅普诺夫有限时间稳定性理论, 设计模糊自适应量化反馈控制器, 使得闭环系统的所有信号均有界. 最后, 通过一个仿真示例验证了设计方法的有效性.
1. 系统描述及预备知识
1.1 系统描述
考虑如下一类严格反馈非线性系统
$$ \left\{ \begin{array}{l} \dot{x}_{i}(t) = g_{i}(\bar{x}_{i}(t))x_{i+1}(t)+f_{i}\left( \bar{x} _{i}(t)\right) \\ \dot{x}_{n}(t) = g_{n}(\bar{x}_{n}(t))Q\left( u(t)\right) +f_{n}\left( \bar{x} _{n}(t)\right) \\ y(t) = x_{1}(t) \end{array} \right. $$ (1) 其中,
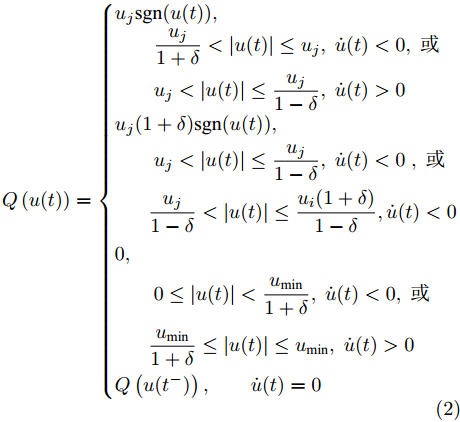
$\bar{x}_{i}(t) = \left[ x_{1}(t), \cdots, x_{i}(t)\right] ^{{\rm{T}}}\in {\bf{R}} ^{i},i = 1,\cdots ,n ,y(t)\in$ ${\bf{R}}$ 分别表示系统的状态变量及输出变量;$ g_{i}\left( \cdot \right), $ $ f_{i}\left( \cdot \right) $ 为原点邻域内未知光滑非线性函数.为了增加新的量化水平、避免量化信号的快速切换及抖振问题, 本文选取如下迟滞量化器[16]
$$ Q\left( u(t)\right) = \left\{ \begin{aligned} &u_{j}{\rm{sgn}}(u(t)), \\[-2pt] &\;\;\;\;\;\;\;\frac{u_{j}}{1+\delta }<\left\vert u(t)\right\vert \leq u_{j},\;\dot{u}(t)<0,\; {\rm{\text{或}}} \\ &\;\;\;\;\;\;\;u_{j}<\left\vert u(t)\right\vert \leq \dfrac{u_{j}}{1-\delta },\;\dot{u}(t)>0 \\[-2pt] &u_{j}(1+\delta ){\rm{sgn}}(u(t)), \\ &\;\;\;\;\;\;\;u_{j}<\left\vert u(t)\right\vert \leq \dfrac{u_{j}}{1-\delta },\;\dot{u}(t)<0 \; ,\; {\rm{\text{或}}}\\ &\;\;\;\;\;\;\dfrac{u_{j}}{1-\delta }<\left\vert u(t)\right\vert \leq \dfrac{ u_{i}(1+\delta )}{1-\delta },\dot{u}(t)<0 \\ &0,\\ &\;\;\;\;\;\;\;0\leq \left\vert u(t)\right\vert <\dfrac{u_{\min }}{1+\delta },\;\dot{u}(t)<0,\; {\rm{{\text{或}}}} \\ &\;\;\;\;\;\;\dfrac{u_{\min }}{1+\delta }\leq \left\vert u(t)\right\vert \leq u_{\min },\; \dot{u}(t)>0 \\ &Q\left( u(t^{-})\right) ,\;\;\;\;\;\;\;\dot{u}(t) = 0 \end{aligned} \right. $$ (2) 其中,
$\delta = \dfrac{1-\varrho }{1+\varrho }, 0 < \varrho < 1, j = 1, 2, \cdots.$ $ u_{\min}>0 $ , 其取值决定了死区$ Q(u(t)) $ 的大小.本文的控制目标为: 确定区间
$\Omega = \{ 0,\pm u_{j},$ $\pm u_{j}(1+\delta)\}$ 和控制输入$ u(t) $ , 使得量化反馈控制器$ Q(u(t)) $ 确保系统的跟踪误差在固定时间内收敛于原点的一个很小邻域内,并且闭环系统的所有信号实际固定时间稳定.根据文献[17], 量化输入
$ Q(u(t)) $ 可以描述为$$ Q(u(t)) = H(u)u(t)+L(t) $$ (3) 且满足如下条件
$$ 1-\delta \leq H(u(t))\leq 1+\delta $$ (4) $$ \left\vert L(t)\right\vert \leq u_{\min }\;\;\;\;\;\;\;\;\;\;\;\qquad $$ (5) 1.2 预备知识
下面的定义、引理及假设对系统自适应实际固定时间量化反馈控制起了重要作用.
定义1[18]. 考虑系统
$$ \dot{x}(t) = f(x(t)), \;x(0) = 0, \;f(0) = 0 $$ (6) 其中,
$x(t)\in {\bf{R}} ^{n}$ 是系统的状态变量,$ f(\cdot ) $ 为光滑非线性函数. 若系统(6)是李雅普诺夫意义下稳定, 若存在有限收敛时间$ T_{s}(x_{0}), $ 对于所有时间$t\geq T_{s}, $ $ x(t) = 0 $ 恒成立, 且收敛时间$ T_{s} $ 存在与状态变量无关的确定上界, 则该系统是固定时间稳定的.引理1[18-20]. 考虑系统(6), 若存在正定函数
$ V(x) $ 及正实数$ \mu _{1}, \mu _{2}, \chi >1 ,0<\vartheta <1, $ 满足$$ \dot{V}(x)\leq -\mu _{1}V^{\chi }(x)-\mu _{2}V^{\vartheta }(x) $$ (7) 则称系统(6) 是固定时间稳定的, 其收敛时间为
$$ T_{s}\leq \frac{1}{\mu _{1}(\chi -1)}+\frac{1}{\mu _{1}(1-\vartheta )} $$ (8) 进一步, 若存在正常数
$ \chi \varrho <1,\vartheta \varrho >1 $ 和$ 0<\Xi <\infty , $ 使得$$ \dot{V}(x)\leq -\left( \mu _{1}V^{\chi }(x)+\mu _{2}V^{\vartheta }(x)\right) ^{\varrho }+\Xi $$ (9) 成立, 则该系统是实际固定时间稳定.
注1. 为了证明推导方便, 在后面的设计过程中, 令引理1中的参数
$ \varrho = 1,\chi = 0.75,\vartheta = 2. $ 引理2[21]. 对于
$x\in {\bf{R}}$ 及$ \forall $ $ \varepsilon >0, $ 满足$$ 0\leq \left\vert x\right\vert <\varepsilon +\dfrac{x^{2}}{\sqrt{ x^{2}+\varepsilon ^{2}}} $$ (10) 引理3[19].
$\varkappa _{i}\in {\bf{R}} ,i = 1,\cdots ,n$ 及$ o\in \left(0,1\right] , $ 有$$ \left( \sum\limits_{k = 1}^{n}\left\vert \varkappa _{k}\right\vert \right) ^{o}\leq \sum\limits_{k = 1}^{n}\left\vert \varkappa _{k}\right\vert ^{o} $$ (11) 引理4[11]. 对于
$ x_{i}\geq 0, $ 下列不等式成立$$ \left( \sum\limits_{k = 1}^{m}x_{k}\right)^{2}\leq m\sum\limits_{k = 1}^{m}x_{k}^{2} $$ (12) 引理5[22]. 对于
$ o_{1}>0,o_{2}>0,o_{3}>0,\gamma _{1}\geq 0,$ $ \gamma _{2}\geq 0 ,\gamma _{3}\geq 0, $ 如下不等式成立$$ \begin{split} \gamma _{1}^{o_{1}}\gamma _{2}^{o_{2}}\gamma _{3} \leq \;&o _{3}\gamma _{1}^{o_{1}+o_{2}}+\frac{o_{2}}{o_{1}+o_{2}}\times \\ &\left[ \frac{o_{1}}{o_{3}\left( o_{1}+o_{2}\right) }\right] ^{\frac{o_{1}}{ o_{2}}}\gamma _{2}^{o_{1}+o_{2}}\gamma _{3}^{\frac{o_{1}+o_{2}}{o_{2}}} \end{split} $$ (13) 引理6[11]. 对于任意的
$ \epsilon >0, $ 下式成立$$ \varpi _{1}\varpi _{2}\leq \frac{\epsilon ^{m}}{m}\left\vert \varpi _{1}\right\vert ^{m}+\frac{1}{n\epsilon ^{n}}\left\vert \varpi _{2}\right\vert ^{n} $$ 其中,
$ m>1, n>1 $ 且$ (m-1)(n-1) = 1. $ 引理7[22]. 函数
$f(Z):{\bf{R}} ^{q}\rightarrow {\bf{R}}$ 是在紧集$ \Omega _{Z} $ 中定义的连续函数$ , $ 对于任意常数$ \tau >0, $ 存在模糊逻辑系统$ W^{\rm{T}}R(Z) $ 使得$$ f(Z) = W^{\rm{T}}R(Z)+\delta (Z),\;\left\vert \delta (Z)\right\vert <\tau $$ (14) 其中,
$ \delta (Z) $ 为逼近误差,$W = \left[ w_{1},w_{2}, \cdots, w_{l}\right] ^{\rm{T}}\in {\bf{R}} ^{l}$ 表示权值向量,$ R(Z) = \left[ r_{1}(Z),r_{2}(Z),\cdots ,r_{l}(Z)\right]^{\rm{T}}, $ $r_{i}(Z) = \exp [ -\left( Z-\varsigma _{i}\right)^{\rm{T}}\left( Z-\varsigma _{i}\right) /\eta _{i}^{2}]$ 是模糊基函数向量, 这里,$ i = 1, 2, \cdots, l, \varsigma _{i} = \left[ \varsigma _{i,1}, \varsigma_{i,2}, \cdots, \varsigma _{i,l}\right] $ 是基函数的中心,$ \eta _{i} $ 是基函数的宽度.假设1[11]. 系统(1)中的函数
$g_{i}( \cdot )\; (i = 1, \cdots, n)$ 有界, 即: 存在正常数$ \underline{g}_{i}>0, $ 使得$$ \underline{g}_{i}<\left\vert g_{i}\left( \cdot \right) \right\vert,\;\;\; \underline{g}_{n}\leq \left\vert g_{n}\left( \cdot \right) \right\vert \leq \bar{g}_{n} $$ 不失一般性, 假设
$ g_{i}\left( \cdot \right) $ 为严格正的.假设2[11]. 输出跟踪信号
$ y_{r}(t) $ 及其直到$ n $ 阶导数均为连续有界.2. 控制器设计
2.1 设计过程
本节中, 应用反演算法,在假设1和假设2下设计实际固定时间跟踪控制器. 首先, 引入如下坐标变换
$$ z_{i} = x_{i}-\alpha _{i-1},\;\;i = 1,\cdots ,n $$ (15) 其中,
$ \alpha _{i-1} $ 是虚拟控制律,$ \alpha _{0} = y_{r}. $ 整个控制器设计过程分$ n $ 步, 具体为:步骤 1. 根据式(1)和式(15), 有
$$ \dot{z}_{1} = g_{1}z_{2}+g_{1}\alpha _{1}+f_{1}-\dot{y}_{r} $$ (16) 考虑如下Lyapunov函数
$$ V_{1} = \frac{z_{1}^{2}}{2}+\frac{\tilde{\theta}_{1}^{2}}{2r_{1}} $$ (17) 其中,
$ \tilde{\theta}_{1} = \theta _{1}-\hat{\theta}_{1}, $ $ \hat{\theta}_{1} $ 是$ \theta _{1} $ 的估计$ , $ $ r_{1} $ 为大于零的设计参数.它的时间导数为
$$ \dot{V}_{1} = z_{1}\left( g_{1}z_{2}+g_{1}\alpha _{1}+\Lambda _{1}\right) - \frac{z_{1}^{2}}{2}-\frac{\tilde{\theta}_{1}\dot{\hat{\theta}}_{1}}{r_{1}} $$ (18) 其中,
$ \Lambda _{1} = f_{1}-\dot{y}_{r}+\frac{z_{1}}{2} $ 是一个未知光滑函数$ , $ 它可以被一个模糊逻辑系统逼近, 有$$ \Lambda _{1}(Z_{1}) = W_{1}^{\rm{T}}R_{1}(Z_{1})+\delta _{1}(Z_{1}),\left\vert \delta _{1}(Z_{1})\right\vert \leq \tau _{1} $$ (19) 其中,
$ \delta _{1}(Z_{1}) $ 为逼近误差,$ Z_{1} = \left[ x_{1},y_{d},\dot{y}_{d}\right]. $ 利用完全平方公式,
$ z_{1}\Lambda _{1} $ 可以表示为$$ z_{1}\Lambda _{1} \le \frac{1}{2a_{1}^{2}}z_{1}^{2}\theta _{1}R_{1}^{ {\rm{T}}}R_{1} + \frac{a_{1}^{2}}{2}+\frac{z_{1}^{2}}{2}+\frac{\tau _{1}^{2}}{2} $$ (20) 其中,
$ \theta _{1} = \left\Vert W_{1}\right\Vert ^{2} $ . 将式(20)代入到式(18), 得到$$ \begin{split} \dot{V}_{1}\le\; & z_{1}g_{1}z_{2}+z_{1}g_{1}\alpha _{1}-\frac{\tilde{\theta} _{1}\dot{\hat{\theta}}_{1}}{r_{1}} + \\ &\frac{1}{2a_{1}^{2}}z_{1}^{2}\theta _{1}R_{1}^{\rm{T}}R_{1}+\frac{ a_{1}^{2}}{2}+\frac{\tau _{1}^{2}}{2} \end{split} $$ (21) 设计第1个子系统的自适应律
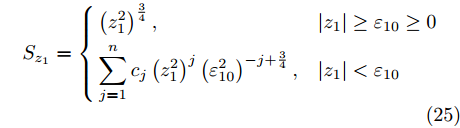
$ \dot{\hat{\theta}}_{1} $ 和虚拟控制律$ \alpha _{1} $ 为$$ \dot{\hat{\theta}}_{1} = \frac{r_{1}}{2a_{1}^{2}}z_{1}^{2}R_{1}^{\mathrm{T }}R_{1}-\tau _{1}\hat{\theta}_{1}-\frac{\kappa _{1}\hat{\theta}_{1}^{3}}{ r_{1}}\;\;\;\;\;\;\qquad $$ (22) $$ \alpha _{1} = -\frac{z_{1}\check{\alpha}_{1}^{2}}{\underline{g}_{1}\sqrt{ z_{1}^{2}\check{\alpha}_{1}^{2}+\varepsilon _{1}^{2}}}\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\qquad $$ (23) $$ \begin{split} \check{\alpha}_{1} =&\; K_{11}\left( \frac{1}{2}\right) ^{0.75}\frac{S_{z_1}}{z_{1}}+K_{12}\left( \frac{1}{2}\right) ^{2}z_{1}^{3} + \\ &\frac{1}{2a_{1}^{2}}z_{1}\hat{\theta}_{1}R_{1}^{\rm{T}}R_{1} \end{split} $$ (24) 其中,
$ a_{1},K_{11},K_{12},\kappa _{1} $ ,$ \varepsilon _{1} $ 均表示正的设计参数, 且$ S_{z_1} $ 定义为$$ S_{z_{1}} = \left\{ \begin{aligned} &\left( z_{1}^{2}\right) ^{\frac{3}{4}}, &\left\vert z_{1}\right\vert \geq \varepsilon _{10}\geq0 \\ &\displaystyle\sum\limits_{j = 1}^{n}c_{j}\left( z_{1}^{2}\right) ^{j}\left( \varepsilon _{10}^{2}\right) ^{-j+\frac{3}{4}}, &\left\vert z_{1}\right\vert < \varepsilon _{10}\qquad\end{aligned} \right. $$ (25) 其中
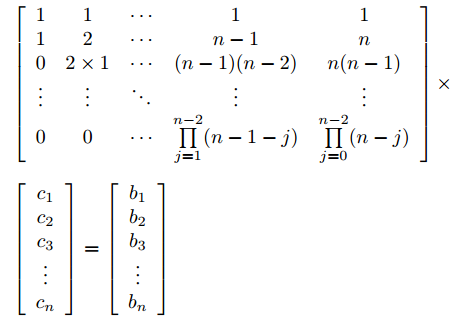
$ c_{j}\,(j = 1,\cdots ,n) $ 各系数由如下方程计算求得:$$ \begin{split} &\left[ {\begin{array}{*{20}{c}} 1&1& \cdots &1&1\\ 1&2& \cdots &{n - 1}&n\\ 0&{2 \times 1}& \cdots &{(n - 1)(n - 2)}&{n(n - 1)}\\ \vdots & \vdots & \ddots & \vdots & \vdots \\ 0&0& \cdots &{\prod\limits_{j=1}^{n-2}(n - 1 - j)}&{\prod\limits _{j = 0}^{n - 2}(n - j)} \end{array}} \right]\times \\ & \left[ {\begin{array}{*{20}{c}} {{c_1}}\\ {{c_2}}\\ {{c_3}}\\ \vdots \\ {{c_n}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{b_1}}\\ {{b_2}}\\ {{b_3}}\\ \vdots \\ {{b_n}} \end{array}} \right] \end{split} $$ 其中,
$b_{1} = 1,\,b_{2} = \dfrac{3}{4},\,b_{3}=\dfrac{3}{4}( \dfrac{3}{4}-1) ,\,b_{n} = \prod\nolimits _{j = 0}^{n-2}(\dfrac{3}{4}-j). $ 根据引理
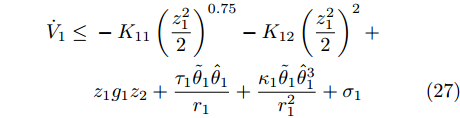
$ 2 $ , 式(23)和式(24),$ z_{1}g_{1}\alpha _{1} $ 变换为$$ z_{1}g_{1}\alpha _{1} \le -\frac{z_{1}^{2}\check{\alpha}_{1}^{2}}{\sqrt{ z_{1}^{2}\check{\alpha}_{1}^{2}+\varepsilon _{1}^{2}}} < \varepsilon _{1}-z_{1}\check{\alpha}_{1} $$ (26) 将式(24), 式(22)和式(26)代入式(21), 得到
$$ \begin{split} \dot{V}_{1} \le\;& -K_{11}\left( \frac{z_{1}^{2}}{2}\right) ^{0.75}-K_{12}\left( \frac{z_{1}^{2}}{2}\right) ^{2} + \\ &z_{1}g_{1}z_{2}+\frac{\tau _{1}\tilde{\theta}_{1}\hat{\theta}_{1}}{r_{1}}+ \frac{\kappa _{1}\tilde{\theta}_{1}\hat{\theta}_{1}^{3}}{r_{1}^{2}}+\sigma _{1} \end{split} $$ (27) 其中,
$ \sigma _{1} = \frac{a_{1}^{2}}{2}+\frac{\tau _{1}^{2}}{2}+\varepsilon _{1}>0. $ 注2. 上述分析过程仅考虑了当
$ \left\vert z_{1}\right\vert \geq \varepsilon _{10} $ 的情形. 当$ \left\vert z_{1}\right\vert <\varepsilon _{10} $ 时, 通过重复上述的分析过程, 可以得出式(27)中存在一个有界的附加项, 其可以看作是式(27)中常数项$ \sigma _{1} $ 产生的一个微小增量. 为了讨论方便, 在理论分析过程中仅讨论$ \left\vert z_{i}\right\vert \geq \varepsilon _{i0} $ 的情况.步骤
${\boldsymbol{i}}$ (${\boldsymbol{2\leq i\leq n-1}}$ ). 考虑第$ i $ 个子系统, 对$ z_{i} $ 求导得$$ \dot{z}_{i} = g_{i}z_{i+1}+g_{i}\alpha _{i}+f_{i}-\dot{\alpha}_{i-1} $$ (28) 定义李雅普诺夫函数
$ V_{i} $ 为$$ V_{i} = V_{i-1}+\frac{z_{i}^{2}}{2}+\frac{\tilde{\theta}_{i}^{2}}{2r_{i}} $$ (29) 其中,
$ \tilde{\theta}_{i} $ 表示期望值$ \theta _{i} $ 与估计值$ \hat{\theta}_{i} $ 之间的估计误差,$ r_{i}>0 $ 为设计参数.计算
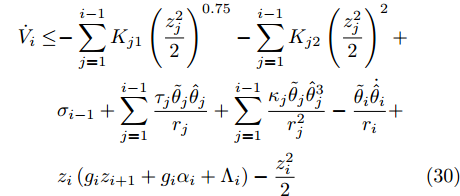
$ V_{i} $ 的导数, 得$$ \begin{split} \dot{V}_{i} \le&- \sum\limits_{j = 1}^{i-1}K_{j1}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75}-\sum\limits_{j = 1}^{i-1}K_{j2}\left( \frac{z_{j}^{2}}{2}\right) ^{2} + \\ &\sigma _{i-1}+\sum\limits_{j = 1}^{i-1}\frac{\tau _{j}\tilde{\theta}_{j}\hat{\theta }_{j}}{r_{j}}+\sum\limits_{j = 1}^{i-1}\frac{\kappa _{j}\tilde{\theta}_{j}\hat{\theta} _{j}^{3}}{r_{j}^{2}}-\frac{\tilde{\theta}_{i}\dot{\hat{\theta}}_{i}}{r_{i}} + \\ &z_{i}\left( g_{i}z_{i+1}+g_{i}\alpha _{i}+\Lambda _{i}\right) -\frac{ z_{i}^{2}}{2} \end{split} $$ (30) 其中,
$ \Lambda _{i} = f_{i}-\dot{\alpha}_{i-1}+g_{i-1}z_{i-1}+\frac{z_{i}}{2} $ 表示一个未知光滑函数, 借助模糊逻辑系统$ W_{i}^{\rm{T}}R_{i}(Z_{i}) $ 对其进行逼近$ , $ 有$$ \Lambda _{i}(Z_{i}) = W_{i}^{\rm{T}}R_{i}(Z_{i})+\delta _{i}(Z_{i}),\left\vert \delta _{i}(Z_{i})\right\vert \leq \tau _{i} $$ (31) 根据完全平方公式, 如下不等式成立
$$ z_{i}\Lambda _{i}\leq \frac{1}{2a_{i}^{2}}z_{i}^{2}\theta _{i}R_{i}^{ {\rm{T}}}R_{i}+\frac{a_{i}^{2}}{2}+\frac{z_{i}^{2}}{2}+\frac{\tau _{i}^{2} }{2} $$ (32) 其中,
$ \theta _{i} = \left\Vert W_{i}\right\Vert ^{2}. $ 设计自适应律
$ \hat{\theta}_{i} $ 和虚拟控制$ \alpha _{i} $ 为$$ \dot{\hat{\theta}}_{i} = \frac{r_{i}}{2a_{i}^{2}}z_{i}^{2}R_{i}^{ {\rm{T}}}R_{i}-\tau _{i}\hat{\theta}_{i}-\frac{\kappa _{i}}{r_{i}}\hat{ \theta}_{i}^{3} $$ (33) $$ \alpha _{i} = -\frac{z_{i}\check{\alpha}_{i}^{2}}{\underline{g}_{i} \sqrt{z_{i}^{2}\check{\alpha}_{i}^{2}+\varepsilon _{i}^{2}}} \;\;\;\;\;\;\;\;\;\;\;\qquad\quad\qquad$$ (34) $$ \begin{split} \check{\alpha}_{i} = & \;K_{i1}\left( \frac{1}{2}\right) ^{0.75}\frac{S_{z_i}}{z_{i}}+K_{i2}\left( \frac{1}{2}\right) ^{2}z_{i}^{3}\; + \\ &\frac{1}{2a_{i}^{2}}z_{i}\hat{\theta}_{i}R_{i}^{\rm{T}}R_{i} \end{split} $$ (35) 其中,
$ a_{i},K_{i1},K_{i2},\kappa _{i},\varepsilon _{i} $ 均为大于零的设计参数, 且$ S_{z_i} $ 定义为$$ S_{z_{i}} = \left\{ \begin{aligned} &\left( z_{i}^{2}\right) ^{\frac{3}{4}}, &\left\vert z_{i}\right\vert \geq \varepsilon _{i0}\geq0 \\ &\sum\limits_{j = 1}^{n}c_{j}\left( z_{i}^{2}\right) ^{j}\left( \varepsilon _{10}^{2}\right) ^{-j+\frac{3}{4}}, &\left\vert z_{i}\right\vert < \varepsilon _{i0} \qquad\end{aligned} \right. $$ (36) 其中, 参数
$ c_j $ 的取值与式(25)相同.根据式(34)和式(35), 得
$$ z_{i}g_{i}\alpha _{i}\leq \varepsilon _{i}-z_{i}\check{\alpha}_{i} $$ (37) 结合式(30)~(37), 如下不等式成立
$$ \begin{split} \dot{V}_{i} \le\; &-\sum\limits_{j = 1}^{i}K_{j1}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75}-\sum\limits_{j = 1}^{i}K_{j2}\left( \frac{z_{j}^{2}}{2}\right) ^{2} + \\ &z_{i}g_{i}z_{i+1}+\sum\limits_{j = 1}^{i}\frac{\tau _{j}\tilde{\theta}_{j}\hat{\theta}_{j}}{r_{j}} \;+\\ &\sum\limits_{j = 1}^{i}\frac{\kappa _{j}\tilde{\theta}_{j}\hat{\theta}_{j}^{3}}{r_{j}^{2}}+\sigma_{i} \end{split} $$ (38) 其中,
$\sigma _{i} = \sigma _{i-1}+\varepsilon _{i}+\dfrac{a_{i}^{2}}{2}+\dfrac{\tau _{i}^{2}}{2}.$ 步骤
${\boldsymbol{n.}}$ 构造李雅普诺夫函数$$ V_{n} = V_{n-1}+\frac{z_{n}^{2}}{2}+\frac{\tilde{\theta}_{n}^{2}}{2r_{n}} $$ (39) 与前面各步骤定义相类似,
$\tilde{\theta}_{n} = \theta _{n}-\hat{\theta}_{n},$ $ r_{n}>0 $ 是大于零的设计参数.利用式(15), 于是
$$ \dot{z}_{n} = g_{n}Q(u)+f_{n}-\dot{\alpha}_{n-1} $$ (40) 结合式(3)和式(40), 计算
$ V_{n} $ 的导数, 得$$ \begin{split} \dot{V}_{n} \le &-\sum\limits_{j = 1}^{n-1}K_{j1}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75}-\sum\limits_{j = 1}^{n-1}K_{j2}\left( \frac{z_{j}^{2}}{2}\right) ^{2}+ \\ &\sigma _{n-1}+\sum\limits_{j = 1}^{n-1}\frac{\tau _{j}}{r_{j}}\tilde{\theta}_{j} \hat{\theta}_{j}+\sum\limits_{j = 1}^{n-1}\frac{\kappa _{j}}{r_{j}^{2}}\tilde{\theta} _{j}\hat{\theta}_{j}^{3} \;+ \\ &z_{n}\left( g_{n}Hu+g_{n}L+\Lambda _{n}\right) - z_{n}^{2}-\frac{1}{r_{n}} \tilde{\theta}_{n}\dot{\hat{\theta}}_{n} \end{split} $$ (41) 其中,
$ \Lambda _{n} = f_{n}-\dot{\alpha}_{n-1}+z_{n-1}g_{n-1}+z_{n}. $ 同样, 利用一个模糊逻辑系统
$ W_{n}^{\rm{T}}R_{n}\left( Z_{n}\right) $ 逼近$ \Lambda _{n} $ , 即$ \Lambda _{n} = W_{n}^{{\rm{T}}}R_{n}+\delta _{n},\left\vert \delta _{n}\right\vert \leq \tau _{n}, $ $ \tau _{n}>0. $ 利用完全公式, 式(4)和式(5), 如下不等式成立
$$ g_{n}z_{n}L\leq \frac{z_{n}^{2}}{2}+\frac{\bar{g}_{n}^{2}u_{\min }^{2}}{2} $$ (42) $$ z_{n}\Lambda _{n} \le \frac{1}{2a_{n}^{2}}z_{n}^{2}\theta _{n}R_{n}^{ {\rm{T}}}R_{n}+ \frac{a_{n}^{2}}{2}+\frac{z_{n}^{2}}{2}+\frac{\tau _{n}^{2}}{2} $$ (43) 其中,
$ \theta _{n} = \left\Vert W_{n}\right\Vert ^{2}. $ 将式(42)和式(43)代入式(41), 得到
$$ \begin{split} \dot{V}_{n} \le &-\sum\limits_{j = 1}^{n-1}K_{j1}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75}-\sum\limits_{j = 1}^{n-1}K_{j2}\left( \frac{z_{j}^{2}}{2}\right) ^{2} + \\ &\sigma _{n-1}+\sum\limits_{j = 1}^{n-1}\frac{\tau _{j}}{r_{j}}\tilde{\theta}_{j} \hat{\theta}_{j}+\sum\limits_{j = 1}^{n-1}\frac{\kappa _{j}}{r_{j}^{2}}\tilde{\theta} _{j}\hat{\theta}_{j}^{3}\; + \\ &z_{n}g_{n}Hu+\frac{\bar{g}_{n}^{2}u_{\min }^{2}}{2}+\frac{1}{ 2a_{n}^{2}}z_{n}^{2}\theta _{n}R_{n}^{\rm{T}}R_{n}\; + \\ &\frac{a_{n}^{2}}{2}+\frac{\tau _{n}^{2}}{2}-\frac{1}{r_{n}}\tilde{\theta} _{n}\dot{\hat{\theta}}_{n} \end{split} $$ (44) 在最后一步中, 设计自适应律
$ \hat{\theta}_{n} $ 和实际控制输入$ u $ 为$$ \dot{\hat{\theta}}_{n} = \frac{r_{n}}{2a_{n}^{2}}z_{n}^{2}R_{n}^{\mathrm{T }}R_{n}-\tau _{n}\hat{\theta}_{n}-\frac{\kappa _{n}}{r_{n}}\hat{\theta} _{n}^{3} \;$$ (45) $$ u= -\frac{z_{n}\check{\alpha}_{n}^{2}}{\underline{g}_{n}\left( 1-\delta \right) \sqrt{z_{n}^{2}\check{\alpha}_{n}^{2}+\varepsilon _{n}^{2}}} \;\qquad$$ (46) $$ \begin{split} \check{\alpha}_{n} = &\;K_{n1}\left( \frac{1}{2}\right) ^{0.75}\frac{S_{z_n}}{z_{n}}+K_{n2}\left( \frac{1}{2}\right) ^{2}z_{n}^{3} \;+ \\ &\frac{1}{2a_{n}^{2}}z_{n}\hat{\theta}_{n}R_{n}^{\rm{T}}R_{n} \end{split} $$ (47) 其中,
$ a_{n},K_{n1},K_{n2},\kappa _{n},\varepsilon _{n} $ 均为大于零的设计参数, 且$ S_{z_n} $ 定义为$$\begin{aligned} S_{z_{n}} = \left\{ \begin{aligned} &\left( z_{n}^{2}\right) ^{\frac{3}{4}},\quad&\left\vert z_{n}\right\vert \geq \varepsilon _{n0}\geq0 \\ &\displaystyle\sum_{j = 1}^{n}c_{j}\left( z_{n}^{2}\right) ^{j}\left( \varepsilon _{10}^{2}\right) ^{-j+\frac{3}{4}}, \quad&\left\vert z_{n}\right\vert < \varepsilon _{n0} \qquad\end{aligned} \right. \end{aligned}$$ (48) 根据式(4), 式(46)及引理2, 得
$$ \begin{split} z_{n}g_{n}Hu \le & -\frac{z_{n}^{2}\check{\alpha}_{n}^{2}}{\sqrt{z_{n}^{2} \check{\alpha}_{n}^{2}+\varepsilon _{n}^{2}}} < \varepsilon _{n}-z_{n}\check{\alpha}_{n} \end{split} $$ (49) 将式(45), 式(47)和式(49)代入式(44), 有
$$ \begin{split} \dot{V}_{n} \le &-\sum\limits_{j = 1}^{n}K_{j1}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75}-\sum\limits_{j = 1}^{n}K_{j2}\left( \frac{z_{j}^{2}}{2}\right) ^{2} + \\ &\sum\limits_{j = 1}^{n}\frac{\tau _{j}}{r_{j}}\tilde{\theta}_{j}\hat{\theta} _{j}+\sum\limits_{j = 1}^{n}\frac{\kappa _{j}}{r_{j}^{2}}\tilde{\theta}_{j}\hat{\theta }_{j}^{3}+\sigma _{n} \end{split} $$ (50) 其中,
$ \sigma _{n} = \sigma _{n-1}+\dfrac{a_{n}^{2}}{2}+\dfrac{\tau _{n}^{2}}{2}+\dfrac{\bar{g}_{n}^{2}u_{\min }^{2}}{2}+\varepsilon _{n}>0. $ 令
$\bar{\mu}_{1} = \min \left( K_{11},K_{21},\cdots ,K_{n1}\right),\bar{\mu}_{2} = \min ( K_{12},$ $K_{22},\cdots ,K_{n2}) .$ 根据引理3和引理4, 得$$ \begin{split} -\sum\limits_{j = 1}^{n}K_{j1}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75} \le & -\bar{ \mu}_{1}\sum\limits_{j = 1}^{n}\left( \frac{z_{j}^{2}}{2}\right) ^{0.75} \leq \\ &-\bar{\mu}_{1}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2}\right) ^{0.75} \end{split} $$ (51) $$ \begin{split} -\sum\limits_{j = 1}^{n}K_{j2}\left( \frac{z_{j}^{2}}{2}\right) ^{2} \leq & -\bar{\mu} _{2}\sum\limits_{j = 1}^{n}\left( \frac{z_{j}^{2}}{2}\right) ^{2} \leq \\ & -\frac{\bar{\mu}_{2}}{n}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2} \right) ^{2} \end{split} $$ (52) 进一步, 利用Young不等式[11], 可得
$$ \sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}\hat{\theta}_{j}}{r_{j}}\leq -\sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}^{2}}{2r_{j}}+\sum\limits_{j = 1}^{n} \frac{\tau _{j}\theta _{j}^{2}}{2r_{j}} $$ (53) 将式(51)~(53)代入式(50), 有
$$ \begin{split} \dot{V}_{n}\leq \;&-\bar{\mu}_{1}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2} \right) ^{0.75}-\left( \sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}^{2}}{ 2r_{j}}\right) ^{0.75} - \\ &\frac{\bar{\mu}_{2}}{n}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2}\right) ^{2}+\left( \sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}^{2}}{2r_{j}} \right) ^{0.75} - \\ &\sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}^{2}}{2r_{j}} +\sum\limits_{j = 1}^{n}\frac{\tau _{j}\theta _{j}^{2}}{2r_{j}} \;+ \\ &\sum\limits_{j = 1}^{n}\frac{ \kappa _{j}\tilde{\theta}_{j}\hat{\theta}_{j}^{3}}{r_{j}^{2}}+\sigma _{n} \end{split} $$ (54) 利用引理5, 令
$o_{1} = 1-o_{2},\;o_{2} = 0.75,\;o_{3} = o_{1}o_{2}^{3},$ $\gamma _{1} = 1, \gamma _{2} = \sum\nolimits_{j = 1}^{n}\dfrac{\tau _{j}\tilde{\theta}_{j}^{2}}{2r_{j}}$ ,$ \gamma _{3} = 1, $ 如下不等式成立$$ \left( \sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}^{2}}{2r_{j}}\right) ^{0.75}\leq o_{3}+\sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta} _{j}^{2}}{2r_{j}} $$ (55) 显见,
$ o_{3} $ 是大于零的正常数.又因为
$\tilde{\theta}_{j}\hat{\theta}_{j}^{3} = \tilde{\theta}_{j}( \theta _{j}^{3}-3\theta _{j}^{2}\tilde{\theta}_{j}+3\theta _{j}\tilde{\theta}_{j}^{2}-\tilde{\theta}_{j}^{3}),$ 并结合式(55), 将式(54)重写为$$ \begin{split} \dot{V}_{n} \leq& -\bar{\mu}_{1}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2} \right) ^{0.75}-\left( \sum\limits_{j = 1}^{n}\frac{\tau _{j}\tilde{\theta}_{j}^{2}}{ 2r_{j}}\right) ^{0.75} - \\ &\frac{\bar{\mu}_{2}}{n}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2}\right) ^{2}-\sum\limits_{j = 1}^{n}\frac{\kappa _{j}\tilde{\theta}_{j}^{4}}{r_{j}^{2}} \;+ \\ &\sum\limits_{j = 1}^{n}\frac{3\kappa _{j}\tilde{\theta}_{j}^{3}\theta _{j}}{ r_{j}^{2}}-\sum\limits_{j = 1}^{n}\frac{3\kappa _{j}\tilde{\theta}_{j}^{2}\theta _{j}^{2}}{r_{j}^{2}} \;+ \\ &\sum\limits_{j = 1}^{n}\frac{\kappa _{j}\tilde{\theta}_{j}\theta _{j}^{3}}{ r_{j}^{2}}+\sum\limits_{j = 1}^{n}\frac{\tau _{j}\theta _{j}^{2}}{2r_{j}} +o_{3}+\sigma _{n} \end{split} $$ (56) 利用引理6, 容易得到
$$ \begin{align} \sum\limits_{j = 1}^{n}\frac{3\kappa _{j}\tilde{\theta}_{j}^{3}\theta _{j}}{r_{j}^{2}} &\leq \sum\limits_{j = 1}^{n}\frac{9\kappa _{j}\epsilon ^{\frac{4}{3}}\tilde{\theta} _{j}^{4}}{4r_{j}^{2}}+\sum\limits_{j = 1}^{n}\frac{3\kappa _{j}\theta _{j}^{4}}{ 4\epsilon ^{4}r_{j}^{2}} \end{align} $$ (57) $$ \begin{align} \sum\limits_{j = 1}^{n}\frac{\kappa _{j}\tilde{\theta}_{j}\theta _{j}^{3}}{r_{j}^{2}} &\leq \sum\limits_{j = 1}^{n}\frac{3\kappa _{j}\tilde{\theta}_{j}^{2}\theta _{j}^{2} }{r_{j}^{2}}+\sum\limits_{j = 1}^{n}\frac{\kappa _{j}\theta _{j}^{4}}{12r_{j}^{2}} \end{align} \qquad$$ (58) 将式(57)和式(58)代入式(56), 得到
$$ \begin{split} \dot{V}_{n} \leq \;&-\bar{\mu}_{1}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2} \right) ^{0.75}-\check{\mu}_{1}\left( \sum\limits_{j = 1}^{n}\frac{\tilde{\theta} _{j}^{2}}{2r_{j}}\right) ^{0.75} -\\ &\frac{\check{\mu}_{2}}{n}\left( \sum\limits_{j = 1}^{n}\frac{\tilde{\theta}_{j}^{2}}{2r_{j}}\right) ^{2} -\frac{\bar{\mu}_{2}}{n}\left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2}\right)^{2}+\Xi\\[-15pt] \end{split} $$ (59) 其中,
$\check{\mu}_{1} = \min \left\{ \tau _{j}\right\} , \check{\mu}_{2} = \min \{ ( 4-9\epsilon ^{\frac{4}{3}})\kappa _{j} \}, \Xi =$ $\sum\nolimits_{j = 1}^{n}\dfrac{3\kappa _{j}\theta _{j}^{4}}{4\epsilon ^{4}r_{j}^{2}}+\sum\nolimits_{j = 1}^{n}\dfrac{\kappa _{j}\theta _{j}^{4}}{12r_{j}^{2}}+\sum\nolimits_{j = 1}^{n}\dfrac{\tau _{j}\theta _{j}^{2}}{2r_{j}}+o_{3}+\sigma _{n}.$ 最后, 设
$\mu _{1} = \min \left\{ \bar{\mu}_{1},\check{\mu}_{1}\right\}, \hat{\mu}_{2} = \min \{ \dfrac{\bar{\mu}_{2}}{n},\dfrac{\check{\mu}_{2}}{n}\},$ 由引理3和引理4, 如下不等式成立$$ \begin{aligned} \dot{V}_{n} \leq & -\mu _{1}\left\{ \left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2} \right) ^{0.75}+\left( \sum\limits_{j = 1}^{n}\frac{\tilde{\theta}_{j}^{2}}{2r_{j}^{2} }\right) ^{0.75}\right\} - \\ &\hat{\mu}_{2}\left\{ \left( \sum\limits_{j = 1}^{n}\frac{z_{j}^{2}}{2}\right) ^{2}+\sum\limits_{j = 1}^{n}\left( \frac{\tilde{\theta}_{j}^{2}}{2r_{j}}\right) ^{2}\right\} +\Xi \leq \\ & -\mu _{1}V_{n}^{0.75}-\mu _{2}V_{n}^{2}+\Xi \\[-10pt] \end{aligned} $$ (60) 其中,
$ \mu _{2} = \dfrac{\hat{\mu}_{2}}{2n} $ .至此, 控制器设计过程结束. 本文的主要结果可总结为第2.2节中的定理1.
2.2 稳定性分析
接下来, 基于引理1, 对系统(1)进行稳定性分析.
定理1. 考虑系统(1)在迟滞量化器(2)及满足假设1和假设2的条件下, 设计实际控制律(46), 并采用式(23)和式(34)所描述的虚拟控制律及式(22), 式(33)和式(45)表示的自适应律, 则
1) 被控系统(1)内所有信号均有界;
2) 系统的跟踪误差在固定时间内收敛于原点的一个很小邻域.
因此, 称该系统是实际固定时间稳定的.
证明. 根据引理1和式(60), 可知
$ V_{n} $ 有界, 进而推出$ z_{i},\tilde{\theta}_{i} $ 有界. 进一步, 由式(23), (24), (34), (35), (46)和(47), 可知$ \alpha _{i} $ 及$ u $ 有界. 又因为$ z_{i} = x_{i}-\alpha _{i}, $ 可确定$ x_{i} $ 的有界性. 综上, 闭环系统内所有信号均有界.进一步, 将式(60)变换成如下形式
$$ \dot{V}_{n}\leq -\mu _{1}V_{n}^{0.75}-\left( 1-\omega \right) \mu _{2}V_{n}^{2}-\omega \mu _{2}V_{n}^{2}+\Xi $$ (61) 其中,
$ 0<\omega <1. $ 显见, 当$V_{n}^{2}\ge \dfrac{\Xi }{\omega \mu _{2}},$ 即$ \Xi \le \omega \mu _{2}V_{n}^{2}, $ 有$$ \dot{V}_{n}\leq -\mu _{1}V_{n}^{0.75}-\left( 1-\omega \right) \mu _{2}V_{n}^{2} $$ (62) 根据引理1,
$ V_{n} $ 收敛于集合$\{ V_{n}:V_{n} < \sqrt{\dfrac{\Xi }{\omega \mu _{2}}}\,\},$ 且收敛时间为$$ T_{s}\leq \frac{1}{\mu _{1}\left( \chi-1 \right) }+\frac{1}{\mu _{2}\left( 1-\omega \right) } $$ (63) □
3. 仿真分析
下面将通过如下算例来验证本文所设计的控制算法的有效性. 考虑如下非线性系统
$$ \left\{ \begin{array}{l} \dot{x}_{1} = x_{2}+\left( 1-\sin x_{1}^{2}\right) x_{1} \\ \dot{x}_{2} = Q(u)+x_{1}x_{2}^{2}-3.5x_{2}+\dfrac{x_{1}}{1+{\rm{e}}^{x_{1}}{}^{x_{2}}} \\ y = x_{1} \end{array} \right. $$ (64) 其中,
$ Q(u) $ 为迟滞量化器;$ \underline{g}_{1} = \underline{g}_{2} = \bar{g}_{2} = 1,y_{r} = $ $ \sin (0.5t)+\cos (1.5t), $ 易见满足假设$ 1 $ 和假设$ 2. $ 根据定理1, 设计系统(64)自适应固定时间量化反馈控制律. 仿真过程中发现, 设计参数的选择合适与否对系统性能有较大影响, 通过反复试凑, 选择如下设计参数:
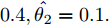
$ K_{11} = K_{12} = 10,K_{21} = K_{22} = $ $10,\, a_{1} = a_{2} = 10,\, \varepsilon _{1} = \varepsilon _{2} = 0.01, r_{1} = r_{2} = 0.01, \tau_{1} =$ $ \tau _{2} = 0.001, $ $ \kappa _{1} = \kappa _{2} = 1;$ 量化参数选择如下:$ \delta = 0.2, $ $ u_{\min } = 0.1; $ 系统初始条件为$ x_{1} = 0.2, x_{2} = -0.5, \hat{\theta_{1}} = $ $ 0.4, \hat{\theta_{2}} = 0.1 .$ 图1表示系统实际输出和期望输出响应曲线, 图2绘制了跟踪误差响应曲线, 从仿真结果可以看出, 在固定时间内, 跟踪误差收敛于原点的一个小邻域内. 图3 ~ 6分别为系统状态
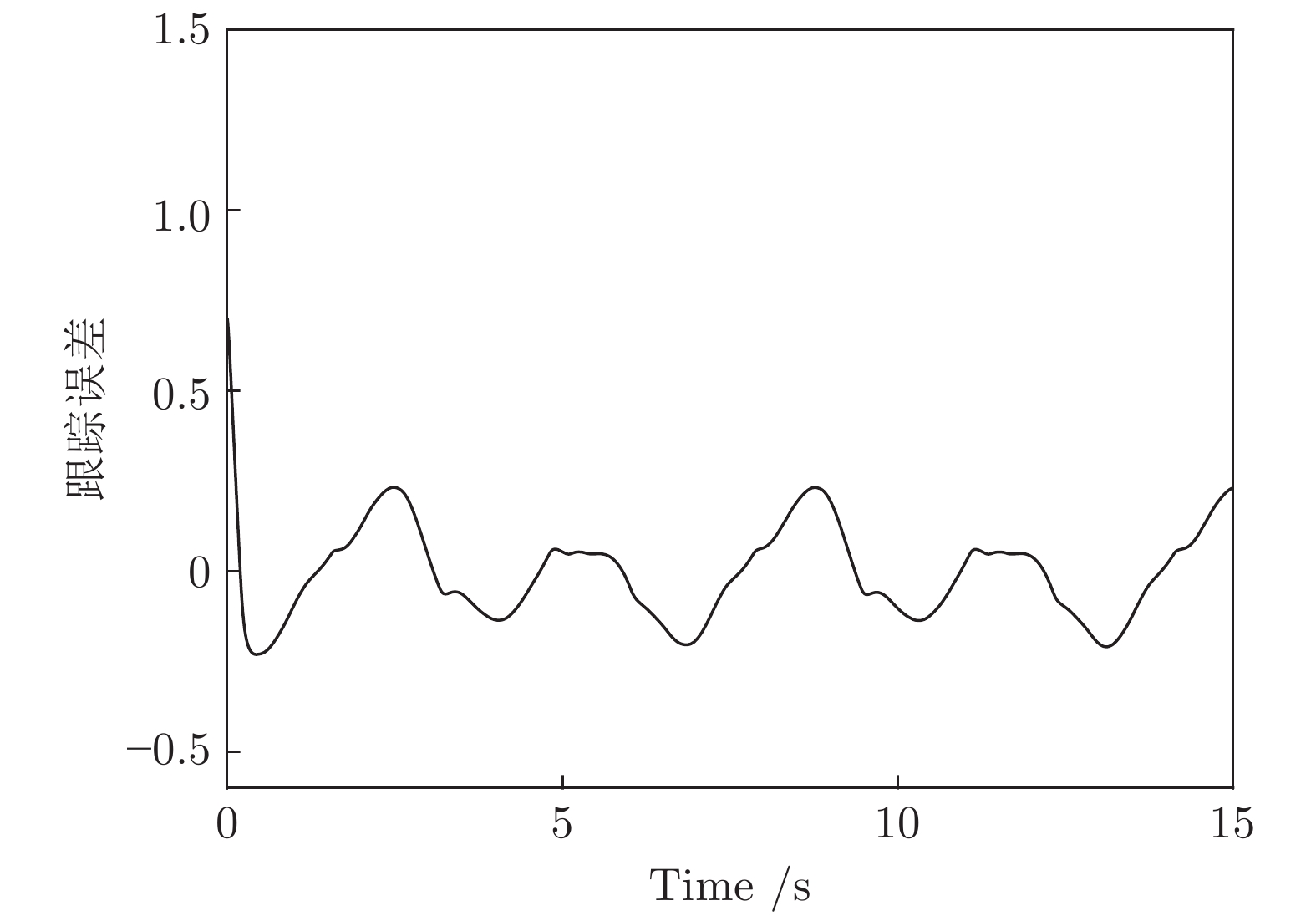
$x_{2}、$ 控制输入$u、 $ 量化输入$ Q(u) $ 及自适应律的响应曲线, 表明系统内所有信号均是有界的. 仿真结果表明该系统是实际固定时间稳定的, 验证了设计方案的有效性. 图 6 自适应律
图 6 自适应律${\hat{\theta}_{1}}, {\hat{\theta}_{2}}$ 响应曲线Fig. 6 Response curves of adaptive control law${\hat{\theta}_{1}}, {\hat{\theta}_{2}}$ 4. 结论
本文针对具有量化输入的一类严格反馈非线性系统, 基于有限时间Lyapunov稳定理论和模糊控制方法等, 研究了非线性系统的模糊自适应实际固定时间跟踪控制问题. 所设计的控制器能够保证系统的跟踪误差在固定时间内收敛于原点的一个小邻域, 同时保证闭环系统内所有信号有界. 仿真算例验证了所提控制方案的有效性. 值得指出的是, 本文所得到的结果是在假设控制系统的所有状态变量可测的前提条件下成立, 然而该假设条件在许多实际系统中难以满足. 为此, 下一步将考虑在状态不可测的条件下, 研究基于状态观测器的固定时间输出反馈控制问题.
-
[1] 秦贞华, 何熊熊, 李刚, 伍益明. 考虑量化输入和输出约束的互联系统自适应分散跟踪控制. 自动化学报, 2019, DOI: 10.16383/j.aas.c180786Qin Zhen-Hua, He Xiong-Xiong, Li Gang, Wu Yi-Ming. Adaptive Decentralized Tracking Control for Nonlinear Interconnected Systems with Input Quantization and Output Constraints. Acta Automatica Sinica, 2019, DOI: 10.16383/j.aas.c180786 [2] 王隔霞. 一类非线性系统量化反馈控制的几何设计方法. 自动化学报, 2019, DOI: 10.16383/j.aas.c180046Wang Ge-Xia. Geometrical Method on Quantized Feedback Control Design for A Class of Nonlinear Systems. Acta Automatica Sinica, 2019, DOI: 10.16383/j.aas.c180046 [3] 王隔霞. 一类非线性系统的量化控制器的设计. 自动化学报, 2016, 42(1): 140−144Wang Ge-Xia. Design of Quantizer for a Class of Nonlinear Systems. Acta Automatica Sinica, 2016, 42(1): 140−144 [4] 刘俊豪, 张皓, 陈启军. 具有均匀量化器的非线性网络控制系统的一致有界性, 控制理论与应用, 2012, 29(11): 1388−1396Liu Jun-Hao, Zhang Hao, Chen Qi-Jun. Uniformalybounded nonlinear etworked control systems with uniform quantizer. Control Theory and Applications, 2012, 29(11): 1388−1396 [5] Hayakawa T, Ishii H, Tsumura K. Adaptive quantized controlfornonlinearuncertain systems. Systems and control letters, 2009, 58(9): 625−632 doi: 10.1016/j.sysconle.2008.12.007 [6] Zhou J, Wen C, Yang G. Adaptive quantized controlfornonlinearuncertain systems. IEEE Transactions on Automatic Control, 2013, 59(2): 460−464 [7] Polyakov A, Efimov D, Perruquetti W. Finite-time and fixed-time stabilization: Implicit Lyapunov function approach. Automatica, 2015, 51: 332−340 doi: 10.1016/j.automatica.2014.10.082 [8] Zuo Z. Non-singular fixed-time terminal sliding mode control of non-linear systems. IET control theory and applications, 2014, 7(4): 545−552 [9] Zuo Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica, 2015, 54: 305−309 doi: 10.1016/j.automatica.2015.01.021 [10] 张骁骏, 袁夏明, 王向阳等. 一种固定时间收敛模型参考终端滑模控制方法, 自动化学报, 2019, DOI: 10.16383/j.aas.c190273Zhang Xiao-Jun, Yuan Xia-Ming, Wang Xiang-Yang, etc. A model reference terminal sliding mode control method with fixed-time convergence. Acta Automatica Sinica, 2019, DOI: 10.16383/j.aas.c190273 [11] Jin X. Adaptive fixed-time control for mimo nonlinear systems with asymmetric output constraints using universal barrier functions. IEEE Transactions on Automatic Control, 2018, 64(7): 3046-3053 [12] Wang H, Liu P X, Li S, Wang D. Adaptive neural outputfeedback control for a class of nonlower triangular nonlinear systems with unmodeled dynamics. IEEE Transactions on Neural Networks and Learning Systems, 2017, 29(8): 3658−3668 [13] Wang H, Liu P X, Bao J, Xie X, Li S. Adaptive neural output-feedback decentralized control for large-scale nonlinear systems with stochastic disturbances. IEEE transactions on neural networks and learning systems, 2019, DOI: 10.1109/TNNLS.2019.2912082 [14] Wang H, Liu P X, Shi P. Observer-based fuzzy adaptive output-feedback control of stochastic nonlinear multiple time-delay systems. IEEE Transactions on Cybernetics, 2017, 47(9): 2568−2578 doi: 10.1109/TCYB.2017.2655501 [15] 王桐, 邱剑彬, 高会军. 随机非线性系统基于事件触发机制的自适应神经网络控制, 自动化学报, 2019, DOI 10.16383/j.aas.2018.c180404 doi: 10.16383/j.aas.2018.c180404Wang Tong, Qiu Jian-Bin, Gao Hui-Jun. Event-triggered Adaptive Neural Network Control for a Class of Stochastic Nonlinear Systems. Acta Automatica Sinica, 2019, DOI 10.16383/j.aas.2018.c180404 doi: 10.16383/j.aas.2018.c180404 [16] Wang F, Chen B, Lin C, Zhang J, Meng X. Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Transactions on Cybernetics, 2017, 48(6): 1839−1848 [17] Liu Z, Wang F, Zhang Y, Chen C.P. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE Transactions on Cybernetics, 2015, 46(2): 524−534 [18] Zuo Z, Tian B, Defoort M, Ding Z. Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics. IEEE Transactions on Automatic Control, 2017, 63(2): 563−570 [19] Zhu Z, Xia Y, Fu M. Attitude stabilization of rigid spacecraft with finite-time convergence. International Journal of Robust and Nonlinear Control, 2011, 21(6): 686−702 doi: 10.1002/rnc.1624 [20] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38(3): 751−766 doi: 10.1137/S0363012997321358 [21] Wang C, Lin Y. Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems. Automatica, 2015, 54: 16−24 doi: 10.1016/j.automatica.2015.01.041 [22] Wang L X, Mendel J M. Fuzzy basis functions, universal approximation, and orthogonal least-squares learning. IEEE transactions on Neural Networks, 1992, 3(5): 807−814 doi: 10.1109/72.159070 期刊类型引用(6)
1. 杨启尧,彭冬亮,蔡建平. 时变输出约束非线性系统的量化反馈自适应终端滑模控制. 控制与决策. 2024(07): 2186-2194 .  百度学术
百度学术2. 马倩,盛兆明,徐胜元. 含有输入时滞的非线性系统的输出反馈采样控制. 自动化学报. 2024(09): 1772-1784 . 本站查看3. Zhiqing LIU,Ronghu CHI,Biao HUANG,Zhongsheng HOU. Finite-time PID control for nonlinear nonaffine systems. Science China(Information Sciences). 2024(11): 238-251 . 必应学术4. 谢佳杰,宋公飞,杜鹏. 网络攻击下电力系统的离散迟滞量化控制. 测控技术. 2023(12): 86-93 . 百度学术5. 卢艳杰,刘永慧. 基于固定时间滑模的直流微电网系统电压控制. 电力科学与技术学报. 2023(06): 159-166+236 . 百度学术6. 汪洪波,王春阳,高含,徐世寒. 基于FFUKF路面附着系数估计的汽车牵引力控制. 力学学报. 2022(07): 1866-1879 . 百度学术其他类型引用(28)
-


























































































































































































 下载:
下载:










 下载:
下载:

计量
- 文章访问数: 1330
- HTML全文浏览量: 495
- PDF下载量: 398
- 被引次数: 34
