

Adaptive CFB Control for a Class of Nonlinear Systems With Intermittent Actuator Faults
-
摘要: 控制系统的执行器经常发生各种未知的间歇性故障. 如何有效地处理这些故障对系统的影响是一个难题. 针对一类不确定严格反馈非线性系统, 提出一种自适应CFB (Command filtered backstepping) 控制方案解决了间歇性执行器故障的补偿问题. 利用神经网络逼近控制器中的未知函数, 并采用投影算子实时在线更新控制器中的估计参数使得参数估计值随着故障次数的累积而不断增加的问题被消除. 提出改进的Lyapunov函数证明了所提出的方案能够保证所有闭环信号的有界性, 同时建立了跟踪误差与Lyapunov函数跳变幅度, 最小故障时间间隔, 设计参数之间的关系. 如果Lyapunov函数的跳变幅度越小以及两个连续故障之间的时间间隔越长, 系统的稳态跟踪指标越好. 通过迭代计算建立了暂态跟踪误差指标的均方根型界. 该界表明了通过选择恰当的设计参数, 可改善系统的暂态指标. 仿真结果表明了所提方案的有效性.Abstract: Actuators of control systems frequently encounter various unknown intermittent faults. How to effectively handle the effects of such faults on the system is a difficult problem. In this paper, an adaptive command filtered backstepping (CFB) compensation control scheme is proposed for a class of uncertain strict-feedback nonlinear systems to address the issue of compensation for intermittent actuator faults. Neural networks are utilized in the controller to approximate unknown functions, and a smooth projection algorithm is adopted to update the estimated parameters in the controller such that the problem of parameter estimate increase with the accumulation of the number of faults is eliminated. A modified Lyapunov function is developed to prove that the proposed scheme can guarantee the boundedness of all closed-loop signals and, the relationship among the tracking error, jumping amplitude of Lyapunov function, minimum fault time interval and design parameters can be established. It is shown that if the jumping amplitude of Lyapunov function is smaller and the time interval between two adjacent faults is longer, the system steady-state tracking performance is better. A root mean square type of bound for the transient tracking error performance is established by using iterative calculation to illustrate that the system transient performance is improved by appropriate choice of design parameters. Simulation results validate the effectiveness of the proposed scheme.
-
由于故障时刻, 故障模式以及故障值完全不可预测, 因此如何消除执行器故障对控制系统的影响已成为控制领域的技术难点[1]. 到目前为止, 自适应控制[2-3]已成为解决执行器故障补偿问题的有效策略. 与其他控制方法相比, 自适应补偿控制具有如下的优点: 1) 能够自动调节执行器故障引起的不确定性; 2) 控制器利用自适应律可在线调整其估计参数; 3) 当故障信息完全未知时, 也可以获得期望的控制目标. 利用线性矩阵不等式技术, 文献[4-6]分别研究了线性系统执行器故障的自适应补偿问题. 文献[7]提出的直接自适应控制方案解决了具有卡死 (Lock in place, LIP) 执行器故障和未知系统参数的线性系统的跟踪控制问题. 结合自适应 Backstepping 控制技术, 文献[8-10]分别研究了具有 LIP 故障的非线性系统的补偿控制问题. 文献[11-12]解决了具有部分失效 (Partial loss of effectiveness, PLOE) 和 LIP 故障的非线性系统的跟踪控制问题. 文献[13]解决了具有 PLOE 故障和 LIP 故障以及松浮 (Float) 故障的非线性系统的跟踪控制问题. 由于NNs (Neural networks)或模糊逻辑系统的通用逼近特性, 文献[14-19]提出的自适应神经或模糊控制方案补偿了执行器故障对系统的影响. 然而, 文献[4-19]仅仅解决了一次性执行器故障的补偿问题, 即所有执行器的状态在故障发生之后保持不变. 虽然在故障时刻存在未知参数的跳变, 但未知参数的跳变次数和Lyapunov函数有界, 因此可以保证闭环系统的稳定性和期望的跟踪指标.
在实际应用中, 控制系统的执行器在运行过程中也经常发生各种不可预测的间歇性故障. 即执行器的状态在正常运行和故障之间(或者各种故障之间)进行频繁地切换. 正如文献[20]所指出的, 间歇性执行器故障会不可避免地导致系统中未知参数的间歇性跳变, 并且跳变的总次数可趋于无穷大. 因此, 一次性故障的研究成果[4-19]不能直接用于具有间歇性执行器故障的控制系统的补偿控制中, 主要有如下的原因: 1) 随着跳变次数的不断累积, 控制器中的一些估计参数会不断的增加, 最终当跳变次数趋于无穷大时, 这些估计参数将变得无界; 2) 由于存在未知参数的间歇性跳变, 则包含参数估计误差的 Lyapunov 函数在每个跳变时刻必将产生一个跳变幅度. 从而上述 Lyapunov 函数的可能增加随着跳变次数的增加而不断累积, 最终当跳变次数趋于无穷大时, 闭环系统的稳定性将得不到保证. 因此, 在间歇性执行器故障的自适应补偿控制方案设计中, 如何有效地保证参数估计的有界性以及闭环系统的稳定性是执行器故障补偿领域的一个技术难点.
目前关于非线性系统的间歇性执行器故障补偿控制的研究成果还非常有限. 在文献[20]中, Wang 等首次解决了一类参数化严格反馈非线性系统的间歇性执行器故障的补偿问题. 所设计的自适应模块化控制方案保证了所有闭环信号的有界性. 但是, 该方案仅仅保证了均方意义上的跟踪误差的有界性. 从而不能建立跟踪误差与设计参数之间的明确关系. 受文献[20]的启发, Lai 等[21-22]和 Xing 等[23]进一步研究了非线性系统间歇性执行器故障的补偿问题. 文献[24]解决了含有未知时滞非线性系统的间歇性执行器故障的补偿问题. 文献[25]解决了航天器姿态控制系统间歇性执行器故障的补偿问题. 采用K−滤波器技术[26-27], 两种自适应输出反馈控制方案补偿了间歇性执行器故障的影响[28-29]. 但是, 以上方案[20-25, 28-29]仅仅证明了系统的稳定性和稳态跟踪指标, 没有建立跟踪误差意义下的系统暂态指标与设计参数之间的关系. 从而不能通过调节设计参数改善系统的暂态指标. 在文献[22]中, 作者在假设故障次数有限的前提下, 提出了一种暂态跟踪误差指标的显式界. 但是该界取决于系统中故障的次数. 当故障次数趋于无穷大时, 系统的暂态指标不能被保证. 则文献[22]中建立的系统暂态指标不能应用于考虑无限次故障的暂态指标分析中. 因此, 在间歇性执行器故障的情况下, 所设计的补偿控制方案中如何明确地建立跟踪误差意义下的系统暂态指标与设计参数之间的关系并通过调节设计参数获得良好的系统暂态指标也具有重要的理论与工程意义.
此外, 文献[9-13, 20-23, 28-29]设计的基于传统的 Backstepping 故障补偿控制方案需要对虚拟控制律的偏导数进行解析计算. 如文献[30-31]所述, 随着系统阶数的增加, 上述计算将变得非常复杂, 从而限制了上述方案在实际中的应用. 鉴于此, 文献[30-31]提出的CFB控制技术在不满足匹配条件的非线性系统的自适应控制中引起了广泛的关注. 与传统的Backstepping技术相比, CFB方法有如下的优点: 1) 指令滤波器可精确地估计虚拟控制信号及其导数; 2) 消除了虚拟控制律解析微分的计算, 使得控制律的设计更容易实现; 3) 指令滤波器引起的滤波误差在控制器中得到了补偿. 因此, 本文采用 CFB 控制技术, 针对一类不确定严格反馈非线性系统, 提出一种自适应控制方案以解决间歇性执行器故障的补偿问题.
本文的主要贡献如下:
1) 采用投影算子在线调整控制器中的估计参数, 可消除故障次数不断累积而导致的估计参数值不断增加的问题.
2) 改进的Lyapunov 函数证明了所提出的方案能够保证所有闭环信号的有界性. 同时明确地建立了跟踪误差与 Lyapunov 函数的跳变幅度, 最小故障时间间隔和设计参数之间的关系. 特别是, Lyapunov 函数的跳变幅度越小和两个连续故障之间的时间间隔越长, 系统跟踪指标越好. 应该指出的是, 系统的跟踪指标与故障次数无任何关系.
3) 通过迭代计算建立了暂态跟踪误差指标的均方根型界. 该界说明了通过选择恰当的设计参数, 可获得良好的跟踪误差意义下的系统暂态指标. 需要说明的是, 该均方根型界不依赖于故障的总次数.
本文其余部分安排如下: 第 1 节给出了问题的描述. 第 2 节设计了控制方案. 第 3 节进行了仿真研究. 第 4 节总结了全文并给出了进一步的研究工作.
符号说明.
$ \bf{R} $ ,$ {\bf{R}}^{+} $ 和$ {\bf{N}}^+ $ 分别表示实数集、正实数集和正整数集;$ |x| $ 表示标量$ x\in\bf{R} $ 的绝对值,$ \|\boldsymbol{x}\| $ 表示实向量$ \boldsymbol{x}\in{\bf{R}}^n $ 的 2-范数,$ \|\boldsymbol{x}\|_{\infty} $ 表示实向量$ \boldsymbol{x}\in{\bf{R}}^{n} $ 的无穷范数,$ \|A\| $ 表示实矩阵$ A\in {\bf{R}}^{n\times{m}} $ 的诱导 2-范数;$ \|\boldsymbol{x}\|_{[0,T]} = \sqrt{\frac{1}{T}\int_{0}^T\|\boldsymbol{x}(\tau)\|^2\mathrm{d}\tau} $ 表示实向量$ \boldsymbol{x}\in{\bf{R}}^n $ 的均方根型界;$ y_{\mathrm{d}}^{(j)}(t) $ 表示$ y_{\mathrm{d}}(t) $ 关于时间$ t $ 的$ j $ 阶导数,$ f^{(j)}(\boldsymbol{x}) $ 表示$ f(\boldsymbol{x}) $ 关于$ \boldsymbol{x} $ 的$ j $ 阶导数;$ \nabla_{\boldsymbol{x}}{\cal P}(\boldsymbol{x}) $ 表示函数$ {\cal P}(\boldsymbol{x}) $ 关于$ \boldsymbol{x} $ 的梯度,$ \nabla_{\boldsymbol{x}}^2{\cal P}(\boldsymbol{x}) $ 表示函数$ {\cal P}(\boldsymbol{x}) $ 关于$ \boldsymbol{x} $ 的二阶梯度;${\hat{\boldsymbol\vartheta}}$ 表示$ \boldsymbol{\vartheta} $ 的估计值,${\tilde{\boldsymbol\vartheta}}$ 表示${\hat{\boldsymbol\vartheta}}$ 与$ \boldsymbol{\vartheta} $ 之间的差值, 即${\tilde{\boldsymbol\vartheta}} = \boldsymbol{\vartheta}-{\hat{\boldsymbol\vartheta}}$ .1. 问题描述
1.1 非线性系统
考虑如下不确定严格反馈非线性系统
$$ \left\{ \begin{aligned} &\dot{x}_i = f_i(\boldsymbol{\bar{x}}_i)+g_i(\boldsymbol{\bar{x}}_i)x_{i+1},\\ &\;\;\qquad\qquad \qquad i = 1,\cdots, n-1\\ & \dot{x}_n = f_n(\boldsymbol{x})+\sum_{k = 1}^mb_{k}(\boldsymbol{x})u_k\\ & y = x_1 \end{aligned} \right.$$ (1) 其中,
$ \boldsymbol{x} = [x_1,\cdots,x_n]^\mathrm{T}\in{\bf{R}}^n $ ,$ \boldsymbol{\bar{x}}_i = [x_1,\cdots,x_i]^{\mathrm{T}}\in {\bf{R}}^i $ 和$ y\in\bf{R} $ 分别表示系统的状态和输出;$ u_k\in\bf{R} $ 表示系统的第$ k $ 个控制输入;$ f_i(\cdot) $ 表示未知非线性函数;$ g_i(\cdot)\neq0 $ 和$ b_k(\cdot)\neq0 $ 表示已知的控制增益函数.与文献[20]类似,采用
$ u_{\mathrm{c}k}$ 表示第$k $ 个执行器的输入, 如果$u_k=u_{u_{{\rm{c}}k}}$ , 则该执行器运行在无故障的状态下. 若第$k $ 个执行器发生了间歇性的故障, 则故障模型可描述为$$ \left\{ \begin{aligned}& u_k = \rho_k^q(t)u_{\mathrm{c}k}+\bar{u}_k^q(t)\\ &\rho_k^q(t)\bar{u}_k^q(t) = 0 \end{aligned},\;\;\; t\in\left[t^q,t^{q+1}\right)\right.$$ (2) 其中,
$ q\in\bf{N}^+ $ 表示故障发生的次数;$ \rho_k^q(t)\in[0,1) $ 和$ \bar{u}_k^q(t) $ 表示未知时变故障参数;$ t^q $ 表示未知的故障时刻, 并且$ 0\leq t^q<t^{q+1} $ . 根据式 (2), 系统的第$ k $ 个执行器的3种状态可描述如下:$ 1) $ 若$ 0<\rho_k^q(t)<1 $ 且$ \bar{u}_k^q(t) = 0 $ , 表明第$ k $ 个执行器发生 PLOE 故障, 则有$ u_k = \rho_k^q(t)u_{\mathrm{c}k} $ . 例如,$ \rho_k^q(t) = 0.5+0.3\sin(t) $ 表明执行器$ k $ 在时间区间$ [t^q,t^{q+1}) $ 内的输出将损失其有效性的 20% ~ 80%.$ 2) $ 若$ \rho_k^q(t) = 0 $ 且$ \bar{u}_k^q(t)\neq0 $ , 表明第$ k $ 个 执行器发生 LIP 故障, 则有$ u_k = \bar{u}_k^q(t) $ . 例如,$ \rho_k^q(t) = 0 $ 表明执行器$ k $ 在时间区间$ [t^q,t^{q+1}) $ 内不受控制输入信号$ u_{\mathrm{c}k} $ 的影响, 而是卡死于未知时变函数$ u_k = \bar{u}_k^q(t) $ .$ 3) $ 若$ \rho_k^q(t) = 1 $ 且$ \bar{u}_k^q(t) = 0 $ , 表明第$ k $ 个执行器没有发生故障, 则有$ u_k = u_{\mathrm{c}k} $ .注 1. 1) 由式(2)可知, 故障参数
$\rho_k^q(t) $ 和$\bar{u} _k^q(t) $ 均为未知时变函数. 与文献[20]中的$\rho_k^q $ 和$\bar{u}_k^q $ 为未知常数的故障模型相比, 式(2)的故障模型更具有一般性. 此外, 未知的$t^q $ ,$\rho_k^q(t) $ 和$\bar{u}_k^q(t) $ 表明了故障信息完全不可预测. 另外, 式 (2) 中的故障模型不仅适用于均匀间隔周期的执行器故障, 而且适用于非均匀间隔周期的执行器故障.2) 便于第 2 节的控制器设计以及稳定性分析, 给出如下的定义. 在时间区间
$ [t^q,t^{q+1}) $ $ (q\in{\bf{N}}^+) $ 内, 假定有$ m^{q}\; \left(m^q\leq{m}-1\right) $ 个执行器$ k_{1},\cdots, k_{m^q} $ 发生 LIP 故障, 且在未知时刻$ t^{q+1} $ 之前, 所有执行器的状态不发生变化.控制的目标是设计一种自适应控制方案使得: a) 能够有效地补偿未知间歇性执性行器故障对系统的影响; b) 闭环系统中所有信号的有界性被保证; c) 系统的输出
$y\in\bf{R}$ 可跟踪期望输出$ y_{\mathrm{d}}\in\bf{R} $ , 其中$ y_{\mathrm{d}} $ 和$ \dot{y}_{\mathrm{d}} $ 已知且有界; 4) 通过选择恰当的设计参数, 可调节系统在跟踪误差意义下的稳态和暂态指标.为了实现上述控制目标, 需要如下的假设.
假设 1. 在每个时间间隔
$[t^q, t^{q+1}) $ 内, 当任意不大于$m-1 $ 个执行器发生LIP 故障时, 剩余的执行器仍可驱动系统完成上述控制目标.假设 2. 对于非线性函数
$ f_i(\cdot) $ ,$ g_i(\cdot) $ ,$ b_k(\cdot) $ : a)$ f_i^{(j)}(\cdot) $ ,$ g_i^{(j)}(\cdot) $ 在$ \boldsymbol{x}\in{\bf{R}}^n $ 上是有界的,$j = 1,\cdots, n- i;$ b) 存在未知常数$ 0<\underline g_i\leq\bar g_i $ ,$ 0<\underline{b}_k\leq\bar{b}_k $ 使得$ \underline g_i\leq{g}_i(\cdot)\leq\bar g_i $ ,$ \underline{b}_k\leq{b}_k(\cdot)\leq\bar{b}_k $ 在$ \boldsymbol{x}\in{\bf{R}}^n $ 上成立.假设 3. 对于 PLOE 故障, 存在已知常数
$ 0< \underline{\rho}_k<1 $ , 使得$ \underline{\rho}_k\leq\rho_k^q(t)<1 $ 成立; 对于 LIP 故障, 存在已知常数$ 0\leq\bar{\bar{u}}_k $ , 使得$ |\bar{u}_k^q(t)|\leq\bar{\bar{u}}_k $ 成立. 此外, 故障参数$ \rho_k^q(t) $ 和$ \bar{u}_k^q(t) $ 在时间间隔$ [t^q, t^{q+1}) $ 上均为光滑函数, 并且存在未知常数$0 < \rho_k^{q*} ,$ $\bar{u}_k^{q*} ,$ 使得$\sup_{t\in[t^q,t^{q+1})}\{|\dot{\rho}_k^q(t)|\}\leq\rho_k^{q*},$ $ \sup_{t\in[t^q,t^{q+1})} \{|\dot{\bar{u}}_k^q(t)|\} \leq \bar{u}_k^{q*} $ 成立.注 2. 假设 1 是保证系统 (1) 可控性的基本且必要的假设. 在每个时间间隔
$ [t^q,t^{q+1}) $ 内允许所有执行器同时发生 PLOE 故障. 但是当所有执行器同时发生 LIP 故障时, 则不能完成上述控制目标. 假设 1 还表明了每个执行器存在无限次故障的可能性. 假设 2[30] 表明了非线性函数$ f_i(\cdot) $ ,$ g_i(\cdot) $ ,$ b_k(\cdot) $ 在$ \boldsymbol{x}\in{\bf{R}}^n $ 上满足 Lipschitz 条件. 因此 , 对于任意的$ \boldsymbol{x}(0)\in{\bf{R}}^n $ , 系统 (1) 都存在唯一的连续解$ \boldsymbol{x}(t) $ [32]. 从而系统 (1) 定义的初值问题的解$ \boldsymbol{x}(t) $ 的有界性在$ \forall{t}\in[0,\infty) $ 上被保证. 假设 3 表明了故障参数$ \rho_k^q(t) $ ,$ \bar{u}_k^q(t) $ 的有界性以及$ \rho_k^q(t) $ ,$ \bar{u}_k^q(t) $ 在$ t\in[t^q,t^{q+1}) $ 上的变化率的有界性. 已知常数$ \underline{\rho}_k $ 和$ \bar{\bar{u}}_k $ 将用于第 2.2 节的自适应律设计中. 此外, 假设$ \rho_k^q(t) $ 和$ \bar{u}_k^q(t) $ 在$ \forall{t}\in[t^q,t^{q+1}) $ 上均为光滑函数仅仅是为了第 2.3 节的稳定性分析的目的, 不用于控制器的设计中.1.2 极限学习机的学习理论
极限学习机 (Extreme learning machine, ELM) 是由 Huang 等[33] 提出的用于单隐层前馈 NNs 的快速学习算法, 其本质上是一种单隐层前馈 NNs. ELM 特点是随机选择网络隐含层节点参数, 在学习过程中仅需要调节网络的输出权值. 正如文献[34]所指出的, ELM 不仅提高了单隐层前馈 NNs 的学习效率, 而且完全保留了传统单隐层前馈 NNs 固有的通用逼近能力. 根据文献[34]中的定理 II.1, 对于任意的随机函数序列
$\left\{h_j(\boldsymbol{Z})\right\}_{j = 1}^L$ , ELM 可以逼近任意连续函数$ f(\boldsymbol{Z}):{\bf{R}}^n\rightarrow\bf{R} $ :$$ f(\boldsymbol{Z}) = \sum_{j = 1}^Lh_j(\boldsymbol{Z})\theta_j+\mu(\boldsymbol{Z}) = \boldsymbol{h}(\boldsymbol{Z})\boldsymbol{\theta}+\mu(\boldsymbol{Z}) $$ (3) 其中,
$ \boldsymbol{Z}\in{\cal S}_{Z} $ 且$ {\cal S}_{Z}\in{\bf{R}}^n $ 表示紧集合;$ \mu(\boldsymbol{Z}) $ 表示逼近误差并且存在未知常数$ \bar{\mu}>0 $ , 使得$ |\mu(\boldsymbol{Z})|\leq \bar{\mu} $ ; 激活函数$ h_j(\boldsymbol{Z}) $ 可表示为$$ h_j(\boldsymbol{Z}) = \mathrm{exp}\left(\frac{-\left(\boldsymbol{Z}-a_j\right)^{\mathrm{T}}\left(\boldsymbol{Z}-a_j\right)}{b_j}\right) $$ (4) 其中,
$ j = 1,\cdots,L $ 以及$ (a_j,b_j) $ 表示第$ j $ 个隐层节点的学习参数, 其在$ {\bf{R}}^n\times\bf{R}^+ $ 的任意区间上随机选择;$ \boldsymbol{\theta} = [\theta_1,\cdots,\theta_L]^\mathrm{T}\in {\bf{R}}^L $ 表示 ELM 的最优权值, 其真实值未知. 因此, 在第 2.1 节的控制器设计中, 采用了基于估计的逼近模型$$ \hat{f}\left(\boldsymbol{Z};\hat{\theta}_1,\cdots,\hat{\theta}_L\right) = \sum_{j = 1}^Lh_j(\boldsymbol{Z})\hat{\theta}_j = \boldsymbol{h}(\boldsymbol{Z})\hat{\boldsymbol{\theta}} $$ (5) 其中,
${\hat{\boldsymbol\theta}} = [\hat{\theta}_1,\cdots,\hat{\theta}_L]^\mathrm{T}\in{\bf{R}}^L$ 表示最优权值$ \boldsymbol{\theta} $ 的估计. 则最优权值$ \boldsymbol{\theta} $ 可定义为$$ \boldsymbol{\theta}: = \arg\min_{{\hat{\theta}}\in{\cal S}_{{\hat{\theta}}}}\left\{\sup_{{Z}\in{\cal S}_{{Z}}}\left|f(\boldsymbol{Z})-\boldsymbol{h}(\boldsymbol{Z}){\hat{\boldsymbol\theta}}\right|\right\} $$ (6) 使得对于
$ \forall\boldsymbol{Z}\in{\cal S}_{{Z}} $ , 逼近误差$ \mu $ 最小. 紧集合$ {\cal S}_{{\hat{\theta}}} $ 定义为$$ {\cal S}_{{\hat{\theta}}}: = \{{\hat{\boldsymbol\theta}}\in{{\bf{R}}}^L\; |\; \|{\hat{\boldsymbol\theta}}\|\leq\bar{\theta}\} $$ (7) 其中,
$ \bar{\theta}>0 $ 为设计常数.2. 自适应神经补偿控制设计
首先, 针对具有间歇性执行器故障 (2) 的系统 (1), 设计一种自适应 CFB 补偿控制方案, 并采用投影算子实时在线更新控制器中的估计参数使得参数估计的有界性被保证. 图1 给出了该控制方案的控制流程. 在图1 中, 以
$ i = 3 $ 为例,$ \alpha_2 $ 表示指令滤波器 (11) 的输入,$ x_{\mathrm{c}3} $ 和$ \dot{x}_{\mathrm{c}3} $ 表示指令滤波器 (11) 的输出, 也表示虚拟控制律$ \alpha_2 $ 及其导数$ \dot{\alpha}_2 $ 的估计, 信号$ \alpha_2 $ ,$ x_{\mathrm{c}3} $ ,$ \xi_3 $ 通过积分运算生成指令滤波误差补偿信号$ \xi_2 $ . 其次, 考虑到未知故障参数的间歇性跳变对系统稳定性的影响, 定理 1 提出一种改进的 Lyapunov 函数分析了闭环系统的稳定性. 证明了所提出的补偿控制方案能够保证所有闭环信号的有界性. 同时明确地建立了跟踪误差与 Lyapunov 函数跳变幅度, 最小故障时间间隔, 设计参数之间的关系. 最后, 定理 2 利用迭代计算建立了暂态跟踪误差指标的均方根型界, 该界表明了通过选择恰当的设计参数, 可获得良好的跟踪误差意义下的系统暂态指标. 图 1 控制结构图 (
图 1 控制结构图 ($x_{\mathrm{c}i}$ 和$\dot{x}_{\mathrm{c}i}$ ,$i = 2,\cdots,n$ , 为滤波器 (11) 的输出.$\alpha_i$ ,$i = 1,\cdots,n$ , 为式 (12) ~ (14) 中定义的虚拟控制律.$\xi_i$ ,$i = 1,\cdots,n-1$ 为式 (17) 中定义的滤波误差补偿信号)Fig. 1 Control block diagram ($x_{\mathrm{c}i}$ and$\dot{x}_{\mathrm{c}i}$ for$i = $ $ 2, \cdots,n$ are the outputs of the filter (11).$\alpha_i$ for$i = $ $ 1,\cdots,n$ is virtual control law defined in (12) ~ (14).$\xi_i$ for$i = 1,\cdots, $ $ n-1$ is the compensating signal of the filtered error defined in (17))2.1 故障补偿控制器设计
实际控制律设计为
$$ u_{\mathrm{c}k} = \frac{1}{b_k(\boldsymbol{x})}u_0,\; \; k = 1,\cdots,m $$ (8) 其中,
$ u_0 $ 将采用CFB控制技术进行设计. 利用注 2 中的 2), 并将式 (2) 和式 (8) 代入系统 (1) 的第$ n $ 个方程, 有$$ \dot{\boldsymbol{x}}_n = f_n(\boldsymbol{x})+\sum_{k = 1}^{m}\rho_k^qu_0+\boldsymbol{\beta}^{\mathrm{T}}\boldsymbol{\phi}(\boldsymbol{x}) $$ (9) 其中,
$\boldsymbol{\beta} = [0,\cdots,\bar{u}_{k_{1}}^q,0,\cdots,\bar{u}_{k_{m^q}}^q,\cdots,0]^{\mathrm{T}}\in{\bf{R}}^m$ $; \boldsymbol{\phi}(\boldsymbol{x}) = [b_1(\boldsymbol{x}),\cdots,b_m(\boldsymbol{x})]^{\mathrm{T}}\in{\bf{R}}^m.$ 由 LIP 故障引起的不确定项$ \boldsymbol{\beta}^{\mathrm{T}}\boldsymbol{\phi}(\boldsymbol{x}) $ 将在控制器设计中得到补偿.在利用 CFB 控制技术设计
$ u_0 $ 之前, 误差坐标变换定义为$$ z_i = x_i-x_{\mathrm{c}i},\;\quad i = 1,\cdots,n $$ (10) 其中,
$ x_{\mathrm{c}1} = y_{\mathrm{d}} $ 且$ y_{\mathrm{d}} $ 为期望轨迹. 由图1 可知, 当$ i = 2,\cdots,n $ 时,$ x_{\mathrm{c}i} $ 与其时间导数$ \dot{x}_{\mathrm{c}i} $ 由如下的指令滤波器[30-31] 生成$$ \dot{x}_{\mathrm{c}i}+K_ix_{\mathrm{c}i} = K_i\alpha_{i-1},\; \; i = 2,\cdots,n $$ (11) 其中,
$ K_i>0 $ 为设计参数; 滤波器的输出$ x_{\mathrm{c}i} $ 和$ \dot{x}_{\mathrm{c}i} $ 分别表示$ \alpha_{i-1} $ 和其导数$ \dot{\alpha}_{i-1} $ 的估计; 式 (11) 的初始条件选择为$ x_{\mathrm{c}i}(0) = \alpha_{i-1}(0) $ ;$ \alpha_i $ 表示第$ i $ 步的虚拟控制律, 其可设计为$$ \alpha_1=\frac{1}{g_1({\bar{{\boldsymbol{x}}}}_1)}\big(-k_1z_1-{{\boldsymbol{h}}}_1\left({\bar{{\boldsymbol{x}}}}_{1}\right){\hat{\boldsymbol\theta}}_1+\dot{x}_{\mathrm{c}1}\big) $$ (12) $$ \begin{split} \alpha_i=\;& \frac{1}{g_i({\bar{{\boldsymbol{x}}}}_i)}\big(-k_iz_i- \\ &g_{i-1}({\bar{{\boldsymbol{x}}}}_{i-1})\bar{z}_{i-1}-\boldsymbol{h}_i\left({\bar{{\boldsymbol{x}}}}_i\right){\hat{\boldsymbol\theta}}_i+\dot{x}_{\mathrm{c}i}\big) \end{split} $$ (13) $$ \begin{split} \alpha_n =\;& \frac{1}{\hat{\rho}}\big(-k_nz_n-g_{n-1}(\boldsymbol{\bar{x}}_{n-1})\times \\ &\bar{z}_{n-1}-\boldsymbol{h}_n(\boldsymbol{x}){\hat{\boldsymbol\theta}}_n-{\hat{\boldsymbol\beta}}^{\mathrm{T}}\boldsymbol{\phi}(\boldsymbol{x})+\dot{x}_{\mathrm{c}n}\big) \end{split} $$ (14) 则由式 (9) 可知,
$ u_0 $ 可设计为$$ u_0 = \alpha_n $$ (15) 其中,
$ k_i>0 $ 表示控制增益参数;${\hat{\boldsymbol\theta}}_i$ ,$ \hat{\rho} $ 和${\hat{\boldsymbol\beta}}$ 分别表示未知参数$ \boldsymbol{\theta}_i $ ,$ \rho = \sum_{k = 1}^{m}\rho_k^q $ 和$ \boldsymbol{\beta} $ 的估计;$\boldsymbol{h}_i({\bar{{\boldsymbol{x}}}}_i)$ ,${\hat{\boldsymbol\theta}}_i$ 分别表示 ELM 的隐层输出和估计输出权值; 信号$ \bar{z}_i $ 是通过消除指令滤波误差$ x_{\mathrm{c}i+1}- \alpha_i $ 的影响而获得的补偿跟踪误差, 其可定义为$$ \bar{z}_i = z_i-\xi_i,\; \; i = 1,\cdots,n $$ (16) 其中,
$ \xi_i $ 表示滤波误差$ x_{\mathrm{c}i}-\alpha_{i-1} $ 的滤波信号, 其可由如下的滤波器[31]生成$$ \dot{\xi}_i+k_i\xi_i = g_i({\bar{{\boldsymbol{x}}}}_i)\xi_{i+1}+g_i({\bar{{\boldsymbol{x}}}}_i)\left(x_{\mathrm{c}i+1}-\alpha_i\right) $$ (17) 其中,
$ i = 1,\cdots,n-1 $ ; 滤波器 (17) 的初始条件选择为$ \xi_i(0) = 0 $ ;$ \xi_{n} = 0 $ .注 3. 在严格反馈系统(1)中, 结合文献[30], 指令滤波器(11)输出
$x_{\mathrm{c}i} $ 和$\dot{x}_{\mathrm{c}i} $ 以及有虚拟控制增益$g_i (\bar{x}_i) $ 的滤波器(17)输出$\xi_{i}$ 的有界性分析如下: 当$ i = 2,\cdots,n $ 时, 假定$ \alpha_{i-1}\leq\bar{\alpha}_{i-1} = \|\alpha_{i-1}\|_{\infty} $ 和$\dot{\alpha}_{i-1}\leq\bar{\bar{\alpha}}_{i-1} = \|\dot{\alpha}_{i-1}\|_{\infty}.$ 根据文献[30]中的引理 2, 有$ |x_{\mathrm{c}i}-\alpha_{i-1}|\leq{\bar{\bar{\alpha}}_{i-1}}/{K_i} $ . 从而由式 (11) 可得$ |x_{\mathrm{c}i}|\leq{\bar{\bar{\alpha}}_{i-1}}/{K_i}+\bar{\alpha}_{i-1} $ 和$ |\dot{x}_{\mathrm{c}i}|\leq\bar{\bar{\alpha}}_{i-1} $ . 当$ i = n- 1 $ 和$ \xi_n = 0 $ 时, 对式 (17) 两边积分并利用$\xi_{n-1}(0) = 0,$ 不等式$|\xi_{n-1}|\leq(\bar{g}_{n-1}\bar{\bar{\alpha}}_{n-1})/ (K_nk_{n-1})$ 成立. 当$i \;=\; 1,\;\cdots,\;n\;-\;2$ 时, 重复上述运算, 可得$|\xi_i|\;\leq \; \sum_{j = i+1}^{n}(\bar{g}^{j-i}\bar{\bar{\alpha}}_{j-1})\;/\;(K_j\bar{k}^{j-i}),$ 其中$\bar{g} = \max_{i = 1,\cdots,n-1} \{g_i\}$ 和$ \bar{k} = \min_{i = 1,\cdots,n-1}\{k_i\} $ . 由文献[31]可知, 如果选择$0<k_i<K_i $ , 指令信号$x_{\mathrm{c}i} $ 和$\dot{x}_{\mathrm{c}i} $ 可精确地估计$\alpha_{i-1} $ 和$\dot{\alpha}_{i-1} $ .2.2 自适应律设计
根据假设1, 有如下的结论:
1) 至少一个执行器发生 PLOE 故障, 则有
$ \underline{\rho} = \min_{k = 1,\cdots,m}\{\underline{\rho}_k\} $ .2) 所有执行器无故障发生, 则有
$ \bar{\bar{\rho}} = m $ .3) 至多有
$ m-1 $ 个执行器发生 LIP 故障, 可得$\|\boldsymbol{\beta}\|\leq\bar{\boldsymbol\beta} = \sqrt{m-1}\max_{k = 1,\cdots,m} \{\bar{\bar{u}}_k\}$ .因此未知参数
$ \rho $ 和$ \boldsymbol{\beta} $ 的取值范围可确定为$ \rho\in[\underline{\rho},\bar{\bar{\rho}}] $ 和$ \|\boldsymbol{\beta}\|\in[0,\bar{\beta}] .$ 从而有$ \hat{\rho}\in[\underline{\rho},\bar{\bar{\rho}}] $ 和$\|{\hat{\boldsymbol\beta}}\|\in [0,\bar{\beta}]$ . 由式 (7) 可知, 存在已知常数$ \bar{\theta}>0 $ 使得${\hat{\boldsymbol\theta}} \in {{\cal S}}_{{\hat{\theta}}}:= \{{\hat{\boldsymbol\theta}} \in {\bf{R}}^{nL}\; |\; \|{\hat{\boldsymbol\theta}}\| \leq \bar{\theta}\}$ 且$ \bar{\theta} = \sqrt{n}\max_{i = 1,\cdots,n}\{\bar{\theta}_i\} $ . 令${\hat{\boldsymbol\vartheta}} = [{\hat{\boldsymbol\theta}}^{\mathrm{T}},\hat{\rho},{\hat{\boldsymbol\beta}}^\mathrm{T}]^{\mathrm{T}}\in{\bf{R}}^{\bar{N}}$ 且$ \bar{N} = nL+m+1 $ , 则可定义如下紧集合$$ \begin{split}{\cal S}_{{\hat{\vartheta}}}^{0}: = \; &\bigg\{ {\hat{\boldsymbol\vartheta}}= [{\hat{\boldsymbol\theta}}^{\mathrm{T}},\hat{\rho}, {\hat{\boldsymbol\beta}}^{\mathrm{T}}]^{\mathrm{T}}\in{\bf{R}}^{\bar{N}} \; |\; \|{\hat{\boldsymbol\theta}}\|<\bar{\theta},\\ & |\hat{\rho}-{\rho}^0|<\bar{\rho},\; \|{\hat{\boldsymbol\beta}}\|<\bar{\beta}\bigg\} \end{split} $$ (18) 其中,
$ \bar{\rho} = \rho^0-\underline{\rho} $ 和$ \rho^0 = (\underline{\rho}+\bar{\bar{\rho}})/2 $ .针对估计参数
${\hat{\boldsymbol\vartheta}}$ , 基于光滑投影算子[20, 26] 的参数自适应律可设计为$$ {\dot{\hat{\boldsymbol\vartheta}}} = \mathrm{Proj}\left\{{\mit{\Gamma}}\Omega\boldsymbol{\tilde{z}}\right\} $$ (19) 其中,
${\mit{\Gamma}} = {\mit{\Gamma}}^{{\rm{T}}} \in { {\bf{R}}}^{\bar{N}\times\bar{N}}$ 为正定矩阵;$\Omega = \mathrm{diag}\{h,\alpha_n/\hat{\rho}, \bar{\phi}\}$ 且$h = {{\rm{diag}}}\left\{\boldsymbol{h}_1^{\mathrm{T}}({\bar{{\boldsymbol{x}}}}_1), \cdots,\boldsymbol{h}_n^{\mathrm{T}}(\boldsymbol{x})\right\}$ 和$\bar{\phi} = \mathrm{diag} \{b_1(\boldsymbol{x}),$ $\cdots,b_m(\boldsymbol{x})\}$ . 向量${\tilde{\boldsymbol{z}}} =[{\bar{\boldsymbol{z}}}^{\mathrm{T}},{\tilde{\boldsymbol{z}}}_n^{\mathrm{T}}]^{\mathrm{T}} $ 且${\bar{{\boldsymbol{z}}}} = [\bar{z}_1,\cdots,\bar{z}_n]^{\mathrm{T}}$ 和${\tilde{\boldsymbol{z}}}_n =[\bar{z}_n,\cdots,\bar{z}_n]^{\mathrm{T}}\in{\bf{R}}^{^{m+1}} $ . 式(21)中定义的投影算子$ \mathrm{Proj}\{\cdot\}$ 的主要作用是保证控制器(12) ~ (14)中的估计参数${\hat{\boldsymbol\theta}}$ ,$\hat{\rho}$ 和${\hat{\boldsymbol\beta}}$ 始终位于集合${\cal S}_{{\hat{\vartheta}}}^{0} $ 内. 关于投影算子的详细设计步骤如下所示.步骤1. 与文献[20, 35]类似, 选择
$ {\cal C}^2 $ 光滑凸函数${\cal P}({\hat{\boldsymbol\vartheta}}):{\bf{R}}^{\bar{N}}\rightarrow\bf{R}$ 为$$ \begin{split} {\cal P}({\hat{\boldsymbol\vartheta}})=\; &\bigg(\frac{\|{\hat{\boldsymbol\theta}}\|}{\bar{\theta}}\bigg)^{p}+\\ &\bigg(\frac{|\hat{\rho}-\rho^0|}{\bar{\rho}}\bigg)^{p}+\bigg(\frac{\|{\hat{\boldsymbol\beta}}\|}{\bar{\beta}}\bigg)^{p}-1+\varepsilon \end{split} $$ (20) 其中,
$ p\geq2 $ 和$ 0<\varepsilon<1 $ 均为实数.步骤2. 利用式 (19), 定义如下的凸集合, 即
$$ {\cal S}_{{\hat{\vartheta}}}: = \{{\hat{\boldsymbol\vartheta}}\; |\; {\cal P}({\hat{\boldsymbol\vartheta}})\leq0\} $$ (21) 显然, 随着
$ \varepsilon $ 不断减小以$ p $ 不断增加, 集合$ {\cal S}_{{\hat{\vartheta}}} $ 无限接近集合$ {\cal S}_{{\hat{\vartheta}}}^{0} $ . 进一步, 为了保证投影算子的光滑性, 与文献[26]类似, 定义如下的另一个凸集合, 即$$ {\cal S}_{{\hat{\vartheta}}}^{\varepsilon}: = \left\{{\hat{\boldsymbol\vartheta}}\; |\; {\cal P}({\hat{\boldsymbol\vartheta}}) \leq \frac {\varepsilon}{2}\right\} $$ (22) 由式 (21) 和式 (22) 可知,
$ {\cal S}_{{\hat{\vartheta}}}\subset{{\cal S}}_{{\hat{\vartheta}}}^{\varepsilon} $ .步骤3. 令
$ \boldsymbol{\tau} = {\mit{\Gamma}}\Omega{\tilde{{\boldsymbol{z}}}} $ , 并利用式 (20) ~ (22), 投影算子$ \mathrm{Proj}\{\boldsymbol{\tau}\} $ 可描述为$$ \begin{split}&\mathrm{Proj}\{\boldsymbol{\tau}\} = \\ &\quad\left\{ \begin{aligned} &\boldsymbol{\tau},\; \mathrm\;\;\;\;\;\;\;\,\;\;\qquad{若}\;{\hat{\boldsymbol\vartheta}}\in\mathring{{{\cal S}}}_{{\hat{\vartheta}}}\; \mathrm{或}\; \nabla_{{\hat{\vartheta}}}{\cal P}^\mathrm{T}({\hat{\boldsymbol\vartheta}})\boldsymbol{\tau}\leq0\\ &\boldsymbol{\tau}-c({\hat{\boldsymbol\vartheta}}){\mit{\Gamma}}\frac{\nabla_{{\hat{\vartheta}}}{\cal P}({\hat{\boldsymbol\vartheta}})\nabla_{{\hat{\vartheta}}}{\cal P}^\mathrm{T}({\hat{\boldsymbol\vartheta}})}{\nabla_{{\hat{\vartheta}}}{\cal P}^\mathrm{T}({\hat{\boldsymbol\vartheta}}){\mit{\Gamma}}\nabla_{{\hat{\vartheta}}}{\cal P}({\hat{\boldsymbol\vartheta}})}\boldsymbol{\tau},\\& \mathrm\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\qquad{若} \;{\hat{\boldsymbol\vartheta}}\in{{\cal S}}_{{\hat{\vartheta}}}^{\varepsilon}\backslash\mathring{{{\cal S}}}_{{\hat{\vartheta}}}\; \mathrm{且}\; \nabla_{{\hat{\vartheta}}}{\cal P}^\mathrm{T}({\hat{\boldsymbol\vartheta}})\boldsymbol{\tau}>0 \end{aligned}\right. \end{split}$$ (23) 其中,
$\nabla_{{\hat{\vartheta}}}{\cal P}({\hat{\boldsymbol\vartheta}})$ 表示函数${\cal P}({\hat{\boldsymbol\vartheta}})$ 关于其参数${\hat{\boldsymbol\vartheta}}$ 的梯度;$ \mathring{{{\cal S}}}_{{\hat{\vartheta}}} $ 表示集合$ {\cal S}_{{\hat{\vartheta}}} $ 的内部; 令${\hat{\boldsymbol\vartheta}}(0)\in{{\cal S}}_{{\hat{\vartheta}}}$ 以及$c({\hat{\boldsymbol\vartheta}}) = \min\{1,{2{\cal P}({\hat{\boldsymbol\vartheta}})}/{\varepsilon}\}$ ; 从而有: 1) 如果${\hat{\boldsymbol\vartheta}}\in\partial{{\cal S}}_{{\hat{\vartheta}}}$ , 则$c({\hat{\boldsymbol\vartheta}}) = 0$ ; 2) 如果${\hat{\boldsymbol\vartheta}}\in\partial{{\cal S}}_{{\hat{\vartheta}}}^{\varepsilon}$ , 则$c({\hat{\boldsymbol\vartheta}}) = 1$ , 其中$ \partial{{\cal S}}_{{\hat{\vartheta}}} $ 和$ \partial{{\cal S}}_{{\hat{\vartheta}}}^{\varepsilon} $ 分别表示紧集合$ {\cal S}_{{\hat{\vartheta}}} $ 和$ {\cal S}_{{\hat{\vartheta}}}^{\varepsilon} $ 的光滑边界.投影算子 (23) 的性质可由如下引理给出:
引理 1.
1)令
$ {\mit{\Gamma}}(t) $ ,$ \boldsymbol{\tau}(t) $ 为连续可微时变函数以及$\dot{\hat{{\boldsymbol\vartheta}}}(t) = \mathrm{Proj}\{\boldsymbol{\tau(t)}\}$ ,${\hat{\boldsymbol\vartheta}}(0)\in{\cal S}_{{\hat{\vartheta}}}^{\varepsilon}$ , 则在其定义域内, 解${\hat{\boldsymbol\vartheta}}(t)$ 始终位于紧集合$ {\cal S}_{{\hat{\vartheta}}}^{\varepsilon} $ 内.2)定义
${\tilde{\boldsymbol\vartheta}} = \boldsymbol{{\vartheta}}-{\hat{\boldsymbol\vartheta}}$ 为参数估计误差, 则有$-{\tilde{\boldsymbol\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\mathrm{Proj}\{\boldsymbol{\tau}\}\leq-{\tilde{\boldsymbol\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\boldsymbol{\tau}$ ,$\forall{{\hat{\boldsymbol\vartheta}}}\in{\cal S}_{{\hat{\vartheta}}}^{\varepsilon}$ ,${\boldsymbol{\vartheta}}\in{\cal S}_{{\hat{\vartheta}}}$ .3)存在 Lyapunov 函数
$V_{{\tilde{\vartheta}}} = {\tilde{\boldsymbol\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}{\tilde{\boldsymbol\vartheta}}$ , 其关于时间的导数满足$\dot{V}_{{\tilde{\vartheta}}}\leq2{\tilde{\boldsymbol\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}(\dot{\boldsymbol{\vartheta}}-\boldsymbol{\tau})$ ,$ \forall\hat{\boldsymbol{\vartheta}}\in{\cal S}_{\hat{{\vartheta}}}^{\varepsilon} $ ,$ {\boldsymbol{\vartheta}}\in{\cal S}_{\hat{{\vartheta}}} $ .证明. 针对具体的函数
$\mathcal{P}(\hat{\vartheta}) $ 和紧集合$\mathcal{S}_{\hat{\vartheta}} $ ,$\mathcal{S}_{\hat{\vartheta}}^{\varepsilon} $ , 结合文献[26]附录E中的结论, 引理1的证明描述如下.1) 由于
${\cal P}(\hat{{\boldsymbol\vartheta}})$ 为$ {\cal C}^2 $ 函数, 则有$\nabla_{\hat{{\vartheta}}}^2{\cal P}(\hat{\boldsymbol{\vartheta}}) = $ $ \mathrm{diag}\{\kappa_{\hat{{\theta}}1}\hat{\boldsymbol{\theta}}\hat{\boldsymbol{\theta}}^\mathrm{T}+\kappa_{\hat{{\theta}}2}I_{nL\times{nL}},\kappa_{\hat{\rho}1}(\hat{\rho}-\rho^0)^2+\kappa_{\hat{\rho}2},\kappa_{\hat{{\beta}}1}\hat{\boldsymbol{\beta}}\hat{\boldsymbol{\beta}}^\mathrm{T}+ $ $\kappa_{\hat{{\beta}}2}I_{m\times{m}}\}\geq0 $ , 其中,$ \kappa_{\hat{{\theta}}1} $ ,$ \kappa_{\hat{{\theta}}2} $ ,$ \kappa_{\hat{\rho}1} $ ,$ \kappa_{\hat{\rho}2} $ ,$ \kappa_{\hat{{\beta}}1} $ ,$ \kappa_{\hat{{\beta}}2}\geq0 $ . 上述分析表明了$ {\cal P}(\hat{\boldsymbol{\vartheta}}) $ 为凸函数, 则$ {\cal S}_{\hat{{\vartheta}}} $ 和$ {\cal S}_{\hat{{\vartheta}}}^{\varepsilon} $ 均为凸集合. 因此, 对于任意的$ \hat{\boldsymbol{\vartheta}}\in{\cal S}_{\hat{{\vartheta}}}^{\varepsilon}\backslash\mathring{{{\cal S}}}_{\hat{{\vartheta}}} $ ,$ c(\hat{\boldsymbol{\vartheta}})\in[0,1] $ , 结合文献[26]中的式 (7), 当$\hat{{\boldsymbol\vartheta}}\in\partial{{\cal S}}_{\hat{{\vartheta}}}^{\varepsilon}$ 时, 有$ \nabla_{\hat{{\vartheta}}}{\cal P}(\hat{\boldsymbol{\vartheta}})\boldsymbol{\tau}\leq0 $ . 由于$ {\boldsymbol{\vartheta}}(0)\in{{\cal S}}_{\hat{{\vartheta}}}^{\varepsilon} $ , 若解$ \hat{\boldsymbol{\vartheta}} $ 存在, 则始终位于紧集合$ {\cal S}_{\hat{{\vartheta}}}^{\varepsilon} $ 内.2) 考虑到
$ {\boldsymbol{\vartheta}}\in{\cal S}_{\hat{{\vartheta}}} $ 以及凸函数$ {\cal P}(\hat{\boldsymbol{\vartheta}}) $ , 当$ \hat{\boldsymbol{\vartheta}}\in {\cal S}_{\hat{{\vartheta}}}^{\varepsilon}\backslash\mathring{{\cal S}}_{\hat{{\vartheta}}} $ 时, 有$ ({\boldsymbol{\vartheta}}-\hat{\boldsymbol{\vartheta}})\nabla_{\hat{{\vartheta}}}{\cal P}(\hat{\boldsymbol{\vartheta}})\boldsymbol{\tau} \leq0 $ . 进一步, 利用文献[26]中的式 (10), 可得$ -\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\mathrm{Proj}(\boldsymbol{\tau})\leq -\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\boldsymbol{\tau} $ .3) Lyapunov 函数
$ V_{\tilde{{\vartheta}}} $ 关于时间的导数为$ \dot{V}_{\tilde{{\vartheta}}} = \tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\dot{\boldsymbol{\vartheta}}-\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\mathrm{Proj}(\boldsymbol{\tau}) $ . 利用引理 1 中的性质 2), 对于$ \forall\hat{\boldsymbol{\vartheta}}\in{\cal S}_{\hat{{\vartheta}}}^{\varepsilon} $ ,$ \forall{\boldsymbol{\vartheta}}\in{{\cal S}_{\hat{{\vartheta}}}} $ , 可得$\dot{V}_{{\tilde{{\vartheta}}}}\leq2\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}(\dot{\boldsymbol{\vartheta}}- \boldsymbol{\tau})$ . □注 4. 引理1表明了对于
$\forall{t}\in[0,\infty) $ , 投影算子(23)可明确地保证估计参数$\hat{\vartheta} $ 的有界性. 从而消除了故障次数不断累积而导致的控制器中估计参数不断增加的问题. 由于$\vartheta\in\mathcal{S}_{\hat{\vartheta}} $ ,$\forall{t}\in[0,\infty) $ , 则有如下的结论: 1) 保证了参数估计误差$\tilde{\vartheta}-\hat{\vartheta} $ 的有界性; 2) 保证了由未知参数$\vartheta $ 间歇性跳变引起的所有Lyapunov函数的跳变幅度的有界性. 结论1)和2)将应用于定理1的证明中.2.3 稳定性分析
定义
$ \bar{\boldsymbol{z}} = [\bar{z}_1,\cdots,\bar{z}_n]^{\mathrm{T}}\in{\bf{R}}^{n} $ . 考虑式 (1), 式 (9), 式 (12) ~ (14), 式 (17), 将式 (10) 代入式 (16) 并微分, 可得如下闭环系统的动态方程$$ \dot{\bar{\boldsymbol{z}}} = A\bar{\boldsymbol{z}}+h\tilde{\boldsymbol{\theta}}+\boldsymbol{B}\left[\frac{\alpha_n}{\hat{\rho}}\tilde{\rho}+\tilde{\boldsymbol{\beta}}^{\mathrm{T}}\boldsymbol{\phi}(\boldsymbol{x})\right]+\boldsymbol{\mu} $$ (24) 其中, 矩阵
$A\in{\cal {\rm{ {\bf{R}}}}}^{n\times n}$ 定义为$$A = \left[ {\begin{array}{*{20}{c}} { - {k_1}}&{{g_1}}&0& \cdots &0\\ { - {g_1}}&{ - {k_2}}&{{g_2}}& \cdots &0\\ 0&{ - {g_2}}&{ - {k_3}}& \cdots &0\\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0& \cdots &{ - {g_{n - 2}}}&{ - {k_{n - 1}}}&{{g_{n - 1}}}\\ 0& \cdots &0&{ - {g_{n - 1}}}&{ - {k_n}} \end{array}} \right]$$ 其中,
$h\in{\cal {{\bf{R}} }}^{nL\times nL}$ 的定义见式 (19);$ \tilde{\boldsymbol{\theta}} = [\tilde{\boldsymbol{\theta}}_1^{\mathrm{T}}, \cdots, \tilde{\boldsymbol{\theta}}_n^{\mathrm{T}}]^{\mathrm{T}}\in{\bf{R}}^{nL} $ 且$\tilde{\boldsymbol{\theta}}_i \;=\; \boldsymbol{\theta}_i\;-\;\hat{\boldsymbol{\theta}}_i$ ;$ \tilde{\rho} = \rho-\hat{\rho}\in\bf{R} $ ;$ \tilde{\boldsymbol{\beta}} = \boldsymbol{\beta}-\hat{\boldsymbol{\beta}}\in{\bf{R}}^{m} $ ;$ \boldsymbol{\mu} = [\mu_1,\cdots,\mu_n]^{\mathrm{T}}\in{\bf{R}}^{n} $ 表示 NNs 的建模误差并且存在未知常数$ \bar{\mu} $ , 使得建模误差$ \boldsymbol{\mu} $ 满足$ \|\boldsymbol{\mu}\|\leq\bar{\mu} $ ;$ \boldsymbol{B} = [0,\cdots,1]^{\mathrm{T}}\in{\bf{R}}^{n} $ .闭环系统的稳定性分析由定理1给出.
定理 1. 考虑由具有间歇性执行器故障 (2) 的不确定严格反馈非线性系统 (1), 实际控制律 (8) 和 (15), 虚拟控制律 (12) ~ (14), 滤波器 (11) 和 (17) 以及基于投影算子的参数自适应律 (19) 组成的闭环系统. 令系统的所有初始条件均有界并满足假设 1 ~ 3 以及选择恰当的设计参数. 即使在运行过程中存在未知参数的间歇性跳变, 所提出的控制方案能够保证闭环系统所有信号的有界性.
证明. 在每个时间间隔
$ [t^q,t^{q+1}) $ 内, Lyapunov 函数选择为$$ V = V_{\bar{\boldsymbol{z}}}+V_{\tilde{\boldsymbol{\vartheta}}} = \bar{\boldsymbol{z}}^{\mathrm{T}}\bar{\boldsymbol{z}}+\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}} $$ (25) Lyapunov函数
$ V $ 沿轨迹 (24) 的导数为$$ \begin{split} \dot{V}= \; &2\bar{{z}}^\mathrm{T}A\bar{\boldsymbol{z}}-2\bar{\boldsymbol{z}}^\mathrm{T}h\tilde{{\theta}}+2\bar{\boldsymbol{z}}^\mathrm{T}\boldsymbol{\mu}+2\bar{\boldsymbol{z}}^\mathrm{T}\boldsymbol{B}\;\times\\ & \left[\frac{\alpha_n}{\hat{\rho}}\tilde{\rho}+\tilde{\boldsymbol{\beta}}^\mathrm{T}\boldsymbol{\phi}(\boldsymbol{x})\right]+2\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\left(\dot{\boldsymbol{\vartheta}}-\dot{\hat{\boldsymbol{\vartheta}}}\right) \end{split} $$ (26) 将式 (19) 代入式 (26), 并利用引理 1 中的性质 2)和性质3), 以及 Young's 不等式
$ \bar{\boldsymbol{z}}^\mathrm{T}\boldsymbol{\mu}\leq(k/2)\|\bar{z}\|^2+ (1/2k)\bar{\mu}^2 $ ,$ \dot{V} $ 满足$$ \dot{V}\leq-k\|\bar{\boldsymbol{z}}\|^2+2\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\dot{\boldsymbol{\vartheta}}+ \frac{\bar{\mu}^2}{k} $$ (27) 其中,
$ k = \min_{i = 1,\cdots,n}\{k_i\} $ . 调用式(25), 可得$$ \|\bar{\boldsymbol{z}}\|^2 = V-\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}} $$ (28) 并将式(28)代入式(27), 可得
$$ \dot{V}\leq-kV+k\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}}+2\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\dot{\boldsymbol{\vartheta}}+ \frac{\bar{\mu}^2}{k} $$ (29) 假定
$ n(0,T) $ 表示在时间间隔$ [0,T) $ 内执行器发生故障的总次数, 且$ \lim_{T\rightarrow\infty}n(0,T) = \infty $ . 则根据假设 3, 有$ \|\dot{\boldsymbol{\vartheta}}\|\leq\bar{\vartheta}^* $ , 且$$ \bar{\vartheta}^* = 2\max_{q = 1,\cdots,n(0,T)} \left\{\sum_{k = 1}^m{\rho}_k^{q*},\sum_{k = k_1,\cdots,k_{m^q}}\bar{u}_k^{q*}\right\} $$ 根据式(18)和
$ \boldsymbol{\vartheta}\in {\cal S}_{\hat{{\vartheta}}} $ , 有$ \|\tilde{\boldsymbol{\vartheta}}\|\leq\bar{\vartheta} $ 且$ \bar{\vartheta} = 2\max\{\bar{\theta}, \bar{\bar{\rho}}, \bar{\beta}\} $ . 因此, 有如下的不等式成立$$ \tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}}\leq\|{{\mit{\Gamma}}^{-1}}\|\bar{\vartheta}^2,\; \; \tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}{\mit{\Gamma}}^{-1}\dot{\boldsymbol{\vartheta}}\leq\|{{\mit{\Gamma}}^{-1}}\|\bar{\vartheta}\bar{\vartheta}^* $$ (30) 将式 (30) 代入式 (29),
$ \dot{V} $ 满足:$$ \dot{V}\leq-kV+k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right) $$ (31) 其中,
$$ \delta(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}) = \|{{\mit{\Gamma}}^{-1}}\|\bar{\vartheta}^2+2k^{-1}\|{{\mit{\Gamma}}^{-1}}\|\bar{\vartheta}\bar{\vartheta}^* +\frac{ \bar{\mu}^2}{k } $$ 在时间间隔
$ [t^{q+},t^{(q+1)-}] $ 内, 对式 (31) 应用比较原理[32], 可得$$ \begin{split} & V\left(t^{(q+1)-}\right)\leq V\left(t^{q+}\right)\mathrm{e}^{-k\left(t^{q+1}-t^{q}\right)}+\mathrm{e}^{-k\left(t^{q+1}-t^{q}\right)}\times \\ &\qquad \int_{t^{q}}^{t^{q+1}}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{e}^{k\left(\tau-t^{q}\right)}\mathrm{d}\tau\\[-18pt] \end{split}$$ (32) 由式 (32) 可知, 若
$ V(t^{q+}) $ 有界, 则时间间隔$ [t^{q+},t^{(q+1)-}] $ 上的稳定性容易获得. 但是, 当故障模式在未知故障时刻$ t^{q+1} $ 发生变化时, 由 PLOE 故障和 LIP 故障引起的未知参数$ \rho^q $ 和$ \boldsymbol{\beta}^q $ 将跳变到新值$ \rho^{q+1} $ 和$ \boldsymbol{\beta}^{q+1} $ . 尽管如此, 仍然使用自适应律 (19) 估计参数的新值$ \rho^{q+1} $ 和$ \boldsymbol{\beta}^{q+1} $ . 这样, 式 (25) 定义的 Lyapunov 函数$ V $ $ t^{q+1} $ 时刻必将产生一个跳变幅度. 因此, 在每一个故障时刻$ t^{q+1} $ , Lyapunov 函数$ V $ 的总跳变幅度可定义为$$ \begin{split} \Delta{V}_{q} =\;& V\big(t^{(q+1)+}\big)-V\big(t^{(q+1)-}\big)=\\ & \tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}\big(t^{(q+1)+}\big){\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}}\big(t^{(q+1)+}\big)-\\ &\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}\big(t^{(q+1)-}\big){\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}}\big(t^{(q+1)-}\big) \end{split} $$ (33) 其中,
$ \tilde{\boldsymbol{\vartheta}}(t^{(q+1)+}) = \boldsymbol{\vartheta}(t^{(q+1)+})-\hat{\boldsymbol{\vartheta}}(t) $ ;$\tilde{\boldsymbol{\vartheta}}(t^{(q+1)-}) = \boldsymbol{\vartheta}(t^{(q+1)-})\;-\;\hat{\boldsymbol{\vartheta}}(t)$ . 由式(33)可得$V\big(t^{(q+1)+}\big)\; = V\big(t^{(q+1)-}\big)+\Delta{V}_q$ , 并将其代入式 (32), 有$$ \begin{split} & V\left(t^{(q+1)+}\right)\leq V\left(t^{q+}\right)\mathrm{e}^{-k\left(t^{q+1}-t^q\right)} +\\ & \quad \Delta{V}_q+\mathrm{e}^{-k\left(t^{q+1}-t^q\right)}\times \\ &\quad \int_{t^q}^{t^{q+1}}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{e}^{k\left(\tau-t^q\right)}\mathrm{d}\tau \end{split} $$ (34) 假定
$ t^1,\cdots,t^{n(0,T)} $ 为故障发生的时刻, 则在时间间隔$ [0,t^{1+}],\cdots,[t^{(n(0,T)-1)+},t^{n(0,T)+}] $ 上, 利用式 (34), 有如下不等式成立$$ \begin{split} & V\left(t^{1+}\right)\leq V(0)\mathrm{e}^{-kt^{1}}+\Delta{V}_1+\mathrm{e}^{-kt^{1}}\times\\ &\qquad\int_{0}^{t^{1}}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{e}^{k\tau}\mathrm{d}\tau \end{split} $$ (35) $$ \begin{split} &\qquad\qquad\quad\quad\vdots\\ & V\left(t^{n(0,T)+}\right)\leq V\left(t^{(n(0,T)-1)+}\right)\times \\ &\qquad\mathrm{e}^{-k\left(t^{n(0,T)}-t^{n(0,T)-1}\right)}+\Delta{V}_{n(0,T)}+ \end{split} $$ $$ \begin{split} &\qquad\mathrm{e}^{-k\left(t^{n(0,T)}-t^{n(0,T)-1}\right)}\int_{t^{n(0,T)-1}}^{t^{n(0,T)}}k\;\times \\ &\qquad\qquad\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{e}^{k\left(\tau-t^{n(0,T)-1}\right)}\mathrm{d}\tau \end{split} $$ (36) 因此, 在时间间隔
$ [0,T) $ 上, 利用式 (35) 和式 (36), 有$$ \begin{split} V(T^{-}) \leq\;& V(t^{n(0,T)+})\mathrm{e}^{-k(T-t^{n(0,T)})} + \mathrm{e}^{-k(T-t^{n(0,T)})}\times\\ & \int_{t^{n(0,T)}}^T k\delta(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta})\mathrm{e}^{k\left(\tau-t^{n(0,T)}\right)}\mathrm{d}\tau \leq \\ & V(0)\mathrm{e}^{-kT}+\sum_{q = 1}^{n(0,T)}\Delta{V}_{q}\mathrm{e}^{-k\left(T-t^{q}\right)}+\mathrm{e}^{-kT}\times\\ & \int_{0}^{t^1}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{e}^{k\tau}\mathrm{d}\tau +\cdots+\\ & \mathrm{e}^{-k\left(T-t^{n(0,T)}\right)}\times\\ & \int_{t^{n(0,T)}}^T k\delta(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta})\mathrm{e}^{k\left(\tau-t^{n(0,T)}\right)}\mathrm{d}\tau\leq \\ & V(0)\mathrm{e}^{-kT}+\sum_{q = 1}^{n(0,T)}\Delta{V}_q\mathrm{e}^{-k(T-t^q)}+\\ & \mathrm{e}^{-kT}\int_{0}^{T}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{e}^{k\tau}\mathrm{d}\tau\\[-15pt] \end{split} $$ (37) 由式 (18) 可得,
$ |\tilde{\rho}|\in[0,2\bar{\bar{\rho}}] $ 和$\|\tilde{\boldsymbol{\beta}}\|\in[0,2\bar{\beta}],$ 则在每一个故障时刻$ t^{q+1} $ , 可得 Lyapunov 函数$ V $ 跳变幅度$ \Delta{V}_q $ 的上界为$$ \left|\Delta{V}_q\right|\leq4\bar{N}\|{{\mit{\Gamma}}^{-1}}\|\max\{\bar{\bar{\rho}},\bar{\beta}\}^2 = \Delta\bar{\vartheta} $$ (38) 其中,
$ \bar{N} $ 的定义见式 (18).假定
$ T^* = \min_{q = 1,\cdots,n(0,T)}\{t^{q+1}-t^q\} $ 表示系统中两个连续执行器故障之间的最小时间间隔. 由此可得$n(t^q,T)\leq(t-t^q)/T^*,$ 进一步有$t^q-T\leq -n(t^q, T)T^*$ 成立, 从而可得到不等式$\sum_{q = 1}^{n(0,T)} \mathrm{e}^{k(t^q-T)} \leq (1 - {\mathrm{e}}^{-kT^*n(0,T)})/(1 - {\mathrm{e}}^{-kT^*}).$ 由于$n(0,T) \leq {T}/T^*,$ 则可得$(1-{\mathrm{e}}^{-kT^*n(0,T)})/(1-{\mathrm{e}}^{-kT^*})\leq (1-{\mathrm{e}}^{-kT})/ (1-\mathrm{e}^{-kT^*})$ . 因此考虑式 (38), 式 (37) 满足$$ \begin{split} V(T^{-})\leq\; & V(0){\mathrm{e}}^{-kT}+\bigg[\frac{\Delta\bar{\vartheta}}{1-{\mathrm{e}}^{-kT^*}}+\\ &\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\bigg]\left(1-{\mathrm{e}}^{-kT}\right) \end{split} $$ (39) 利用
$ \lim_{t\rightarrow\infty}(1-{\mathrm{e}}^{-kT}) = 1 $ , 则在$ \forall{T}\in[0,\infty) $ 上, 有如下不等式成立$$ \begin{split} &V(T^{-})\leq\max\bigg\{V(0){\mathrm{e}}^{-kT},\\ &\qquad\frac{\Delta\bar{\vartheta}}{1-{\mathrm{e}}^{-kT^*}}+\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\bigg\} \end{split} $$ (40) 由于
$ \Delta\bar{\vartheta} $ 和$ T^* $ 均为有界常数. 因此, 由式 (40)可得出$ V(T) $ 在$ \forall{T}\in[0,\infty) $ 上是有界的. 则误差变量$ \bar{z}_1,\cdots,\bar{z}_n $ 有界. 根据式 (16), 可得$ \xi_1,\cdots, \xi_{n-1} $ 的有界性. 由于$ \bar{z}_1 $ ,$ \dot{y}_{\mathrm{d}} $ ,$ \hat{\boldsymbol{\theta}}_1 $ 有界, 则可得$ \alpha_1 $ 的有界性. 从而根据式(11), 指令滤波信号$ x_{\mathrm{c}2} $ 和$ \dot{x}_{\mathrm{c}2} $ 是有界的. 由于$ \bar{z}_1 $ ,$ \bar{z}_2 $ ,$ \hat{\boldsymbol{\theta}}_2 $ ,$ \dot{x}_{\mathrm{c}2} $ 均为有界信号, 则可得$ \alpha_2 $ 的有界性, 从而可得$ x_{\mathrm{c}3} $ 和$ \dot{x}_{\mathrm{c}3} $ 的有界性. 重复上述讨论, 可得$ \alpha_i $ ,$ x_{\mathrm{c}i+1} $ ,$ \dot{x}_{\mathrm{c}i+1} $ ,$ i = 3,\cdots,n-1 $ 是有界的. 由于$ \bar{z}_{n-1} $ ,$ \bar{z}_n $ ,$ \hat{\boldsymbol{\theta}}_n $ ,$ \hat{\rho} $ ,$ \hat{\boldsymbol{\beta}} $ ,$ \dot{x}_{\mathrm{c}n} $ 有界, 则$ \alpha_n $ 有界. 从而由式 (15) 可得$ u_0 $ 有界. 因此, 由式 (8) 可得实际控制信号$ u_{\mathrm{c}k} $ ,$ k = 1,\cdots,m $ , 的有界性. □注 5. 根据式 (25) 和式 (40), 可得
$$ \|\bar{z}\|\leq\sqrt{\frac{\Delta\bar{\vartheta}}{1-{\mathrm{e}}^{-kT^*}}+\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)} $$ (41) 由式(41)可知, 跟踪误差
$\bar{z} $ 与Lyapunov函数的跳变幅度$\Delta\bar{\vartheta} $ 和最小故障时间间隔$T^* $ 相关联, 并且与故障发生次数$n(0,T) $ 无任何关系. 由式 (38) 可得, 增加设计参数$ {\mit{\Gamma}} $ 或者减小设计参数$ \bar{\bar{\rho}} $ ,$ \bar{\beta} $ 可减小$ \Delta\bar{\vartheta} $ . 从而$ \Delta\bar{\vartheta} $ 越小, 系统的稳态跟踪指标越好. 如果两个连续故障之间持续的时间越长, 系统的稳态指标越好. 即$ T^* $ 越大,$ \bar{z} $ 越小. 另外, 增加设计参数$ k_1,\cdots,k_n $ ,$ {\mit{\Gamma}} $ 或者减小设计参数$ \bar{\vartheta} $ , 可维持很小的跟踪误差$ \bar{z} $ .注 6. 如果
$\rho_k^q $ 和$\bar{u}_k^q $ 为未知常数并且NNs建模误差$\mu=0 $ , 则式(27)可表述为$V\leq-k\|\bar{z}\|^2 $ . 从而闭环系统(24)在每个$[t^q, t^{q+1}) $ 上获得了渐近稳定性. 这一结论与文献[20]中发现的结论完全一致. 对于时变的$\rho_k^q (t) $ 和$\bar{u} _k^q (t) $ 以及存在NNs建模误差$\mu $ 的情况下,$\vartheta 和 \mu$ 可能不为零, 则在每个$[t^q, t^{q+1}) $ 上不能获得渐近稳定性. 然而, 根据定理1和式(41), 所提出的方案不仅能够保证闭环系统的稳定性, 而且通过调整设计参数可获得期望小的跟踪误差$\bar{z}$ .2.4 暂态指标分析
利用均方根型的界[27]分析跟踪误差
$ \bar{\boldsymbol{z}} = [\bar{z}_1,\cdots, \bar{z}_n]^\mathrm{T} \in{\bf{R}}^n $ 意义下的系统的暂态指标, 其由定理2给出.定理 2. 考虑满足假设 1~3 的闭环系统 (24). 未知参数
$ \boldsymbol{\vartheta}\in{\cal S}_{\hat{{\vartheta}}} $ 及其估计$ \hat{\boldsymbol{\vartheta}}\in{\cal S}_{\hat{{\vartheta}}}^{\varepsilon} $ , 并且选择恰当的设计参数使得闭环系统所有信号有界. 则跟踪误差的均方根型界定义为$$ \begin{split} \|\bar{\boldsymbol{z}}\|_{2[0,T]}\leq\;&\tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}(0){\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}}(0)+\\ & \frac{\Delta\bar{\vartheta}}{kT^*}+2\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right) \end{split} $$ (42) 其中, 常数
$ k $ ,$ \delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right) $ ,$ \Delta\bar{\vartheta} $ 和$ T^* $ 的定义分别见式 (27), 式 (31), 式 (38) 和式 (39). 定理 2 的详细证明见附录.由于
$ \Delta\bar{\vartheta} $ 和$ T^* $ 均为有限常数, 则跟踪误差的均方根型界 (42) 可得到保证.注 7. 关于式 (42), 有如下结论:
1) 增加设计参数
$ k_1,\cdots,k_n $ ,$ {\mit{\Gamma}} $ 或者减小设计参数$ \bar{\vartheta} $ , 可提高跟踪误差$ \bar{\boldsymbol{z}} $ 的暂态指标.2) 如果
$ \hat{\boldsymbol{\vartheta}}(0) $ 越接近其真实值$ \boldsymbol{\vartheta}(0) $ , 则暂态跟踪误差$\bar{z} $ 指标越好. 这与文献[27]中的结论一致. 但是, 由于存在未知参数的间歇性跳变, 式(42) 是通过迭代式 (A2) 的迭代计算得到的. 因此, 迭代式 (A2) 在跟踪误差$ \bar{\boldsymbol{z}} $ 暂态指标的分析过程中起着重要的作用.3)
$\Delta\bar{\vartheta} $ 和$T^* $ 也与暂态跟踪误差$\bar{z} $ 指标相关联. 由式 (38) 可知, 增加设计参数$ {\mit{\Gamma}} $ 或者减小设计参数$ \bar{\bar{\rho}} $ ,$ \bar{\beta} $ , 可减小跳变幅度$ \Delta\bar{\vartheta} $ . 从而$ \Delta\bar{\vartheta} $ 越小, 系统的暂态指标就越好. 另一方面, 如果$ T^* $ 越大, 系统的暂态指标越好. 即两个连续故障之间的时间间隔越长, 系统的暂态指标越好.4) 暂态跟踪误差
$\bar{z} $ 指标与故障发生次数$n(0,T) $ 没有任何关系, 其仅仅与 Lyapunov 函数$ V $ 的跳变幅度$ \Delta\bar{\vartheta} $ 和最小故障时间间隔$ T^* $ 相关联.3. 仿真研究
选择4个实例为被控对象分别进行仿真实验, 以验证所设计的自适应补偿控制方案对间歇性执行器故障的补偿能力和跟踪控制指标.
3.1 实验1: 数值仿真1
考虑如下的三阶严格反馈非线性系统
$$ \left\{ \begin{aligned} &\dot{x}_1 = x_1\mathrm{e}^{-x_1^2}+(2+\sin(x_1))x_2\\ &\dot{x}_2 = -\sin(x_1)x_2+(1+\mathrm{e}^{-x_1^2x_2^2})x_3\\ &\dot{x}_3 = -x_2x_3+\sum_{k = 1}^2b_{k}(\boldsymbol{x})u_k\\ &y = x_1 \end{aligned} \right. $$ (43) 其中,
$ b_1(\boldsymbol{x}) = b_2(\boldsymbol{x}) = 1.5+0.5\cos(x_1x_2) $ .执行器故障模型选择为
$$ u_1 = \left\{ \begin{array}{l}(0.6 + 0.2\sin(0.5t))u_{\mathrm{c}1},\\ \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; {若}\; t\in[jT^*,(j + 1)T^*)\\ u_{\mathrm{c}1},\; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; {其他} \end{array}\right.$$ (44) $$ u_2 = \left\{ \begin{array}{l}8 + 4\cos(8t),\; \; \; \;\; \; \; {若}\; t\in[jT^*,(j + 1)T^*)\\ u_{\mathrm{c}2},\; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; {其他} \end{array}\right.$$ (45) 其中,
$ j = 1,3,\cdots $ ;$ T^* = 20\;{\rm{s}} $ . 从式 (44) 和式 (45) 中可看出, 在每个$ jT^* \;{\rm{s}}$ 时间段内, 系统中第1个执行器的输出将损失其有效性的 40% ~ 80%, 而第2个执行器将锁死在$ u_2 = 8+4\cos(8t)$ . 在其余时间段内,两个执行器均运行在无故障情况下.针对系统 (43), 控制律选择式 (8) 和式 (15), 自适应律选择式 (19). 期望轨迹选择为
$ y_{\mathrm{d}} = \sin (0.1t)+ 0.6\cos(0.05t) $ . 仿真中, 设计参数选择为$ k_1 = k_2 = k_3 = 60 $ ,$ K_2 = K_3 = 100 $ ,${\mit{\Gamma}} = 2 {I}_{36}$ ,$ \bar{\theta} = 2 $ ,$ \bar{\bar{\rho}} = 2 $ ,$ \underline{\rho} = 0.05 $ ,$ \bar{\beta} = 12 $ ,$ c = 0.01 $ ,$ p = 20 $ . 系统初始条件选择为$ \boldsymbol{x}(0) = [0.6,0,0]^\mathrm{T} $ ,$x_{\mathrm{c}2}(0) = x_{\mathrm{c}3}(0) = \xi_1(0) = \xi_2(0) = 0$ ,$ \hat{\boldsymbol{\theta}}_1(0) \;= \;\hat{\boldsymbol{\theta}}_2(0) \;=\; \hat{\boldsymbol{\theta}}_3(0) = \hat{\rho}(0) = \hat{\boldsymbol{\beta}}(0) = 0.5 $ . ELM 隐含层节点个数选择为$L_1 = L_2 = L_3 = 10$ , 隐含层节点参数$ a_1 $ ,$ a_2 $ ,$ a_3 $ 和$ b_1 $ ,$ b_2 $ ,$ b_3 $ 分别在区间$ [-1,1] $ 和$ [0,1] $ 上随机选择.首先, 从图2 (a) 可看出, 系统的输出
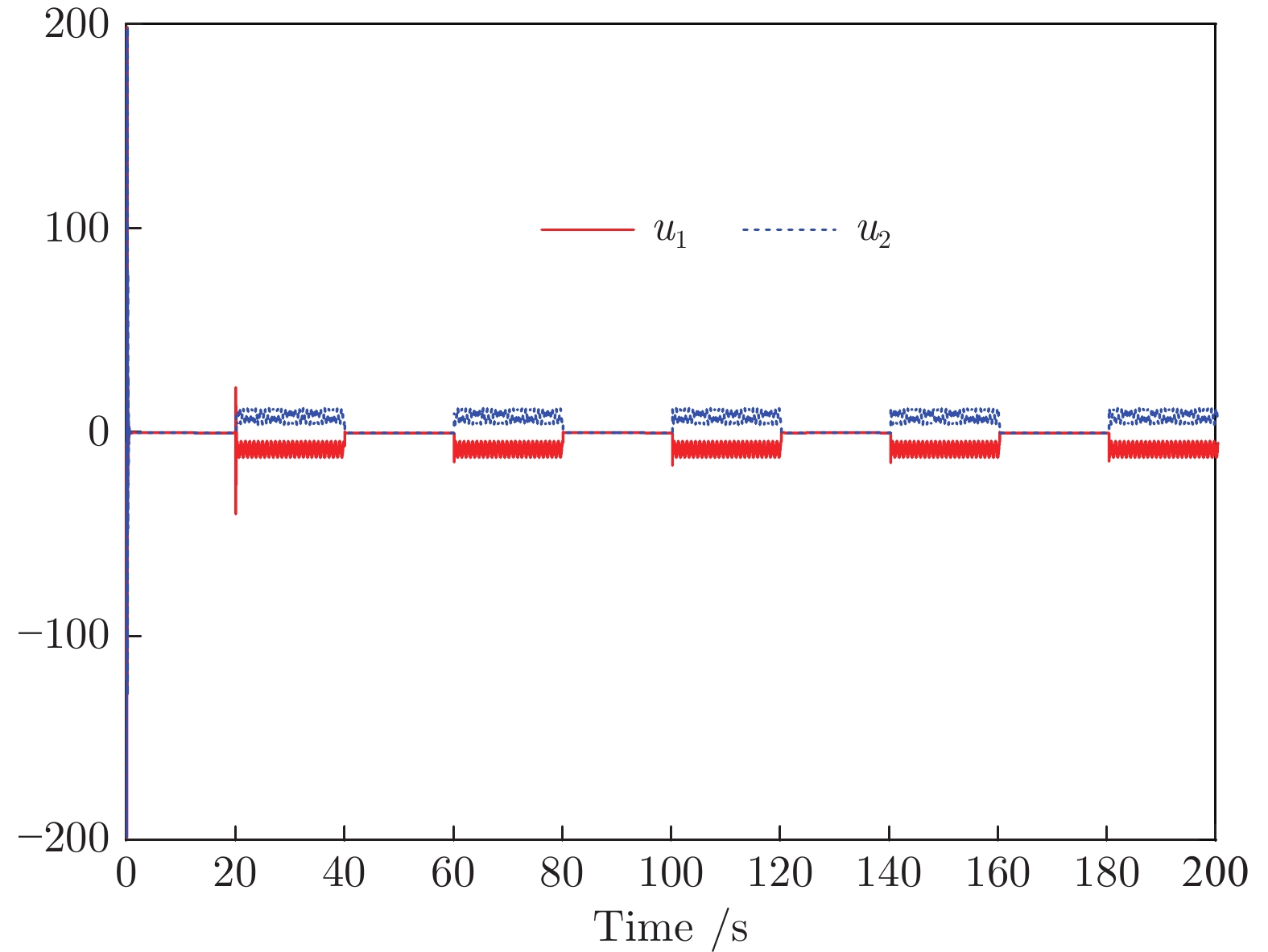
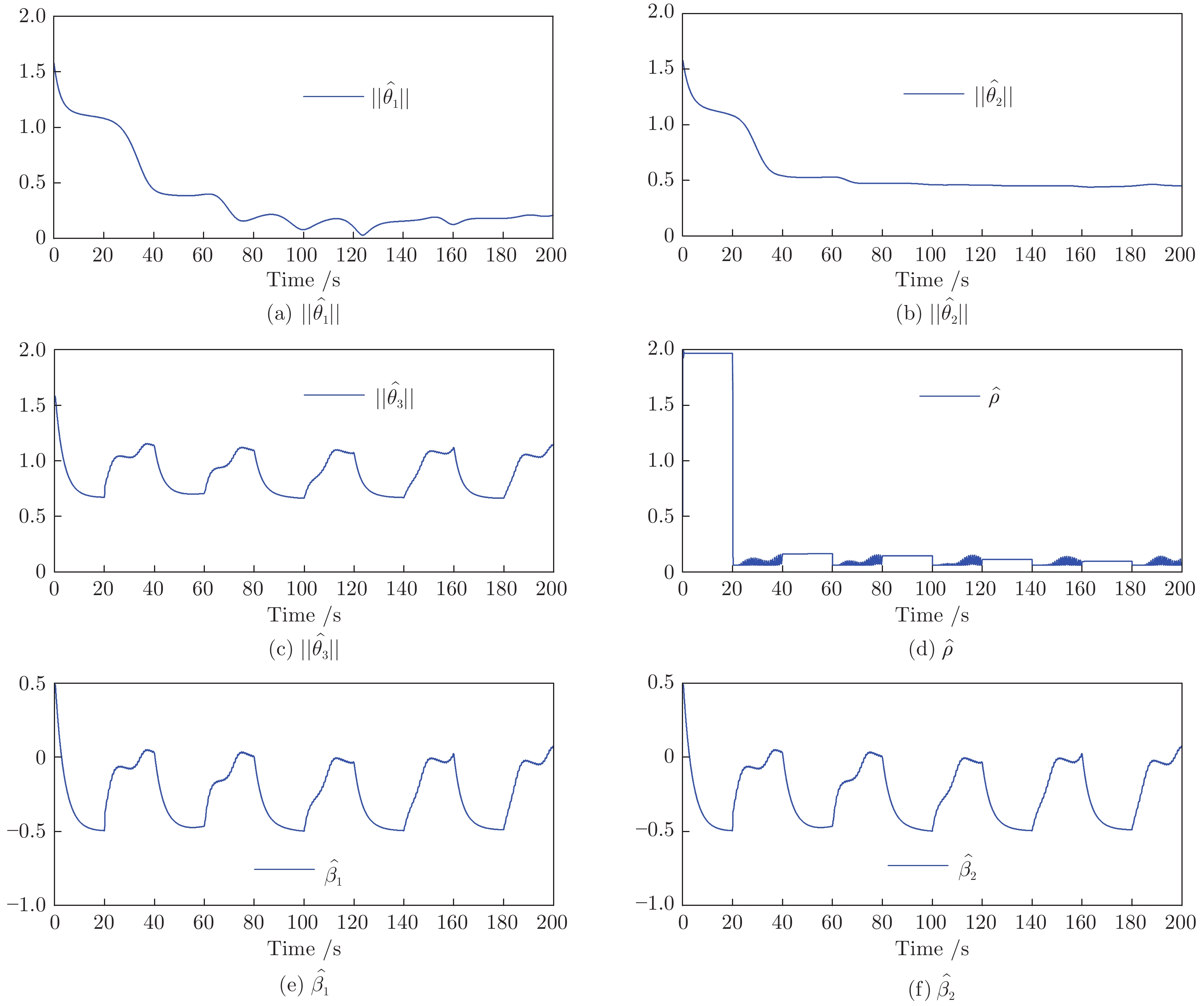
$ y $ 可跟踪给定的期望输出$ y_{\mathrm{d}} $ . 从图2 (b) 可看出, 跟踪误差$ \bar{z}_1 $ 可渐近地收敛到零的一个很小的领域内, 并且增加控制增益参数$ k_1 $ ,$ k_2 $ ,$ k_3 $ 和自适应律因子$ {\mit{\Gamma}} $ 可获得很小的跟踪误差$ \bar{z}_1 $ . 其次, 图3 ~ 5 分别表明了控制输入信号$ u_1 $ ,$ u_2 $ , 滤波信号$ x_{\mathrm{c}2} $ ,$ x_{\mathrm{c}3} $ ,$ \xi_1 $ ,$ \xi_2 $ 和估计参数$ \hat{\boldsymbol{\theta}}_1 $ ,$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 的有界性. 从图5(c) ~ 5(f) 中可清楚地看出, 动态参数$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 随着执行器状态的不断切换而不断跳变. 但是, 选择投影算子实时在线更新控制器中的估计参数, 使得$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 的有界性可得到明确地保证. 最后, 从图2 ~ 5 中可看出, 在均匀间隔周期执行器故障的情况下, 所提出的补偿控制器能够驱动系统完成预期的跟踪控制指标, 同时保证了闭环系统中所有信号的有界性.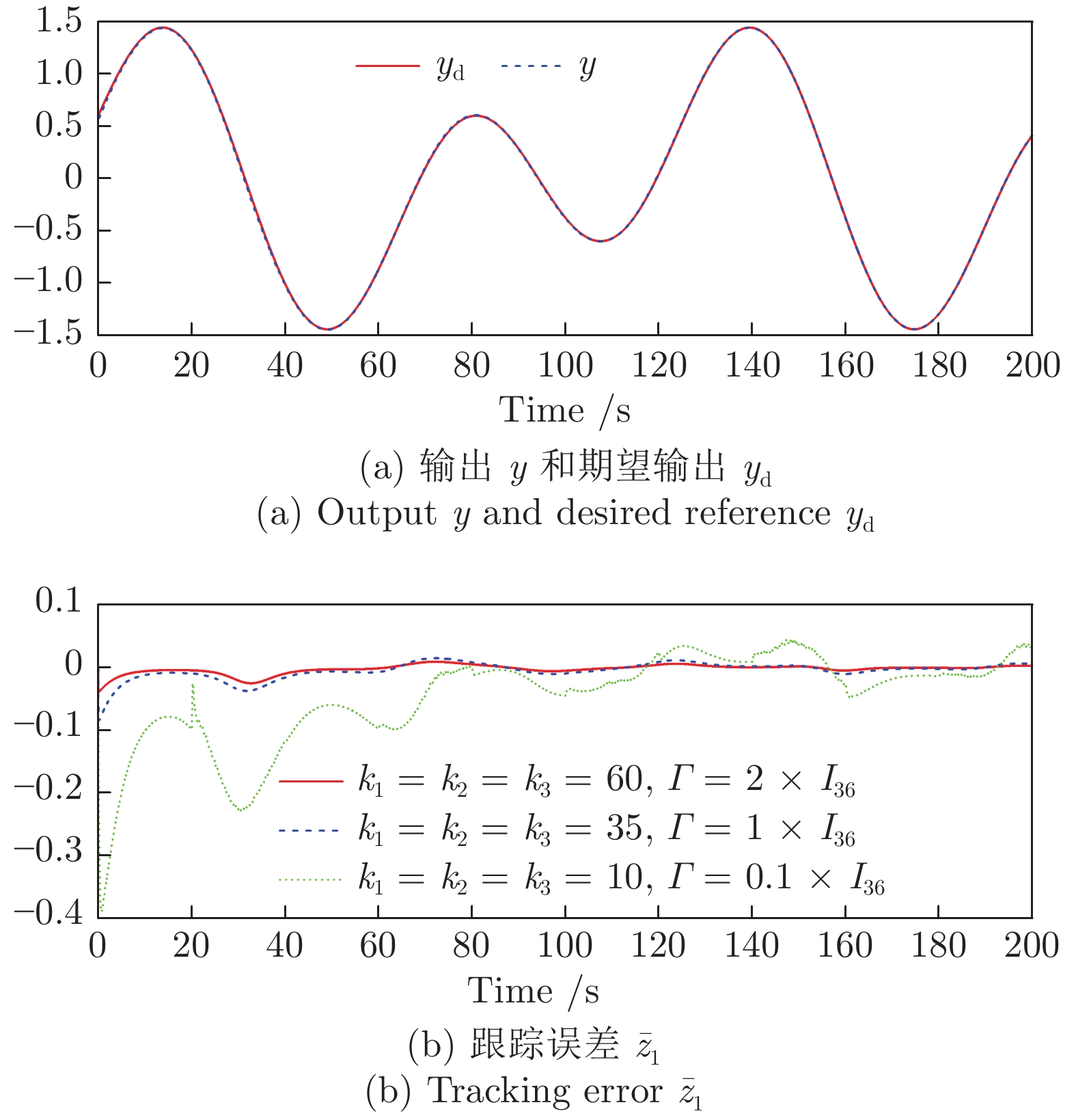 图 2 实验1中输出
图 2 实验1中输出$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 2 Output$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 1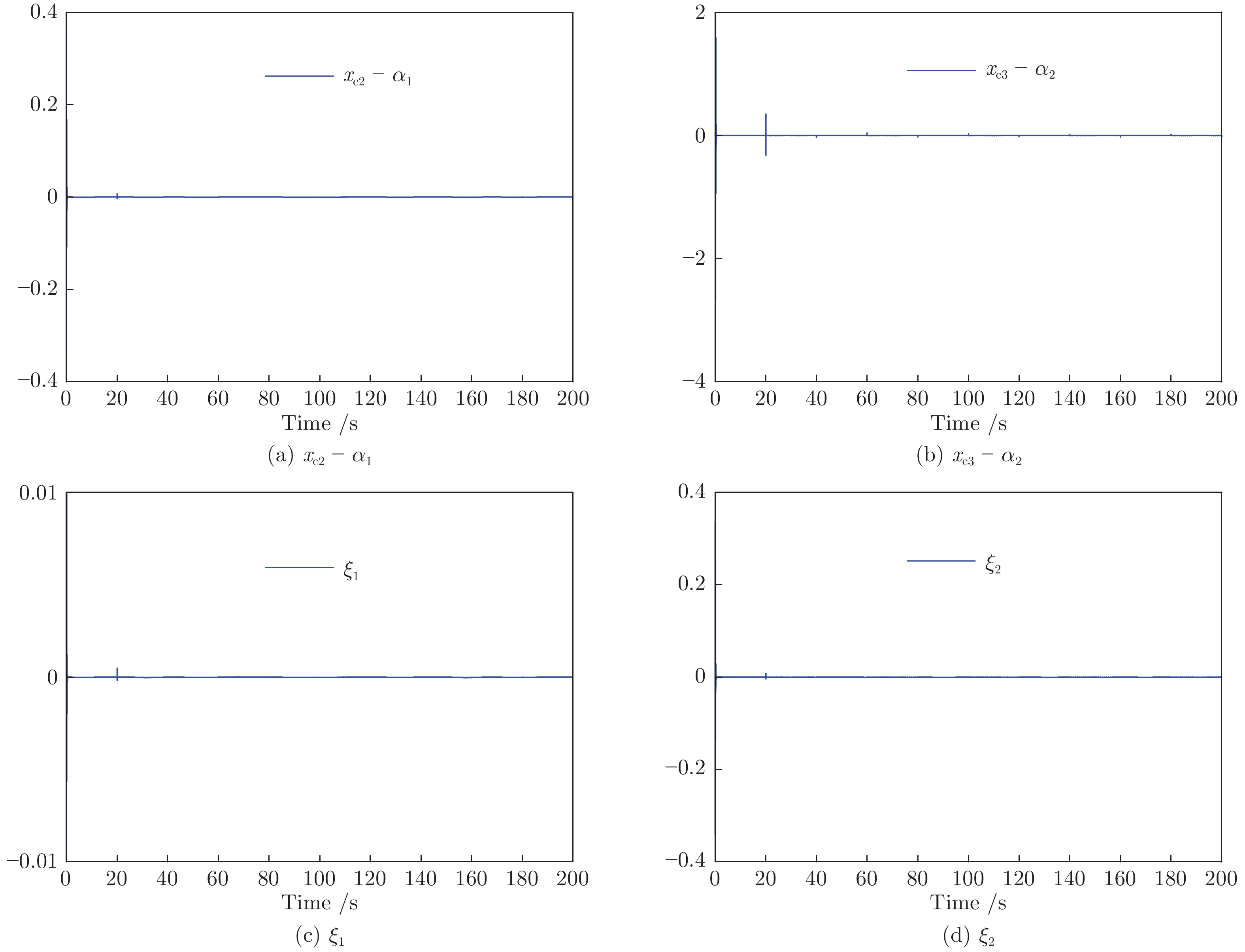 图 4 实验1中命令滤波误差及其补偿信号Fig. 4 Command filtered errors and their compensating signals in Experiment 1
图 4 实验1中命令滤波误差及其补偿信号Fig. 4 Command filtered errors and their compensating signals in Experiment 13.2 实验2: 数值仿真2
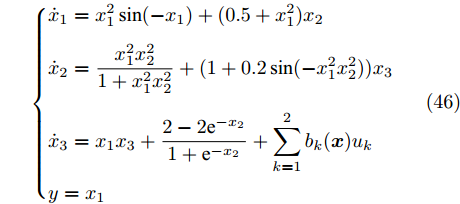
选择如下的三阶不确定严格反馈非线性系统
$$ \left\{\begin{aligned} & \dot{x}_1 = x_1^2\sin(-x_1)+(0.5+x_1^2)x_2\\ & \dot{x}_2 = \frac{x_1^2x_2^2}{1+x_1^2x_2^2}+(1+0.2\sin(-x_1^2x_2^2))x_3\\ &\dot{x}_3 = x_1x_3+\frac{2-2\mathrm{e}^{-x_2}}{1+\mathrm{e}^{-x_2}}+\sum_{k = 1}^2b_{k}(\boldsymbol{x})u_k\\ & y = x_1 \end{aligned} \right. $$ (46) 其中,
$ b_1(\boldsymbol{x}) = b_2(\boldsymbol{x}) = 2+\sin(x_1x_2x_3) $ .执行器故障模型选择为
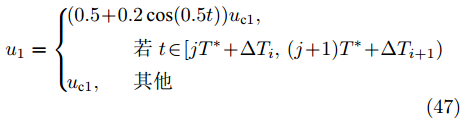
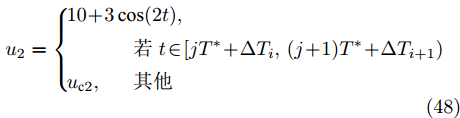
$$ u_1 =\left\{ \begin{array}{l}(0.5 + 0.2\cos(0.5t))u_{\mathrm{c}1},\\ \; \;\; \; \; \; \; \; \; \; \; \; {若}\; t \in [jT^* + \Delta{T}_i,(j + 1)T^* + \Delta{T}_{i+1})\\ u_{\mathrm{c}1},\; \; \; \; \; {其他} \end{array}\right.$$ (47) $$ u_2 =\left\{ \begin{array}{l}10 + 3\cos(2t),\\ \; \; \; \; \; \; \; \; \; \; \;\; {若}\; t \in [jT^* + \Delta{T}_i,(j + 1)T^* + \Delta{T}_{i+1})\\ u_{\mathrm{c}2},\; \; \; \; \; {其他} \end{array}\right. $$ (48) 其中,
$ j = 1,3,\cdots $ ;$ T^* = 15 $ s. 式(47)和式(48)中, 加入不等间隔的$ 0\leq\Delta{T}_1\;<\;\Delta{T}_2\;<\;\cdots< \Delta{T}_i< \Delta{T}_{i+1}< \cdots $ , 使得均匀间隔周期执行器故障变为非均匀间隔周期执行器故障. 从式 (47) 和式 (48) 中可看出, 在每个$ [jT^*+\Delta{T}_i,(j+1)T^*+ \Delta{T}_{i+1})\;{\rm{s}} $ 时间段内, 系统中第1个执行器的输出将损失其有效性的 30% ~ 70%, 而第2个执行器将锁死在$ u_2 =10+ 3\cos(2t) $ . 在其余时间段内, 两个执行器均运行在无故障情况下.针对系统 (46), 控制律选择式 (8) 和式 (15), 自适应律选择式 (19). 期望轨迹选择为
$ y_{\mathrm{d}} = 1.8 \cos(0.1t)-0.6\cos(0.05t) $ . 仿真中, 设计参数选择为$ k_1 = k_2 = k_3 = 80 $ ,$ K_2 = K_3 = 150 $ ,$ {\mit{\Gamma}} = 0.08 {I}_{26} $ ,$ \bar{\theta} = 2.5 $ ,$ \bar{\bar{\rho}} = 2 $ ,$ \underline{\rho} = 0.05 $ ,$ \bar{\beta} = 13 $ ,$ c = 0.01 $ ,$ p = 10 $ ,$ \Delta{T}_1 = 2 \;{\rm{s}}$ ,$ \Delta{T}_2 = 9 \;{\rm{s}}$ ,$ \Delta{T}_3 = 18\;{\rm{s}} $ ,$ \Delta{T}_4 = 23\;{\rm{s}} $ ,$ \Delta{T}_5 = 35\;{\rm{s}} $ ,$ \Delta{T}_6 = 48 \;{\rm{s}}$ ,$ \Delta{T}_7 = 55\;{\rm{s}} $ ,$ \Delta{T}_8 = 60 \;{\rm{s}}$ $ \Delta{T}_9 = 75\;{\rm{s}} $ ,$ \Delta{T}_{10} = 115 \;{\rm{s}}$ ,$ \Delta{T}_{11} = 170 \;{\rm{s}}$ . 系统初始条件选择为$ \boldsymbol{x}(0) = [1.2,0.6,-0.3]^\mathrm{T} $ ,$ x_{\mathrm{c}2}(0) = 0.6 $ ,$ x_{\mathrm{c}3}(0) = -0.3 ,$ $ \xi_1(0) = \xi_2(0) = 0, $ $\hat{\boldsymbol{\theta}}_1(0) = \hat{\boldsymbol{\theta}}_2(0) = \hat{\boldsymbol{\theta}}_3(0) = \hat{\rho}(0) = \hat{\boldsymbol{\beta}}(0) = 0.2$ . ELM 隐含层节点个数选择为$ L_1 = L_2 = L_3 = 8 $ , 隐含层节点参数$ a_1 $ ,$ a_2 $ ,$ a_3 $ 和$ b_1 $ ,$ b_2 $ ,$ b_3 $ 分别在区间$ [-1,1] $ 和$ [0,1] $ 上随机选择.首先, 图6(a) 表明了系统的输出
$ y $ 可跟踪给定的期望输出$ y_{\mathrm{d}} $ . 图6(b) 表明了跟踪误差$ \bar{z}_1 $ 可渐近地收敛到零的一个很小的领域内, 并且增加控制增益参数$ k_1 $ ,$ k_2 $ ,$ k_3 $ 和自适应律因子$ {\mit{\Gamma}} $ 可获得很小的跟踪误差$ \bar{z}_1 $ . 其次, 图7 ~ 9 分别表明了控制输入信号$ u_1 $ ,$ u_2 $ , 滤波信号$ x_{\mathrm{c}2} $ ,$ x_{\mathrm{c}3} $ ,$ \xi_1 $ ,$ \xi_2 $ 和估计参数$ \hat{\boldsymbol{\theta}}_1 $ ,$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 的有界性. 从图9(c), 9(e) 和 9(f) 中可清楚地看出, 动态参数$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 随着故障参数跳变次数的增加而不断跳变. 但是, 基于投影算子的参数自适应律可以保证$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 的有界性. 最后, 从图6 ~ 9 中可看出, 在非均匀间隔周期执行器故障的情况下, 所提出的自适应补偿控制器不仅成功地驱动系统完成预期的跟踪控制指标, 而且保证了所有闭环信号的有界性. 图 6 实验2中输出
图 6 实验2中输出$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 6 Output$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 2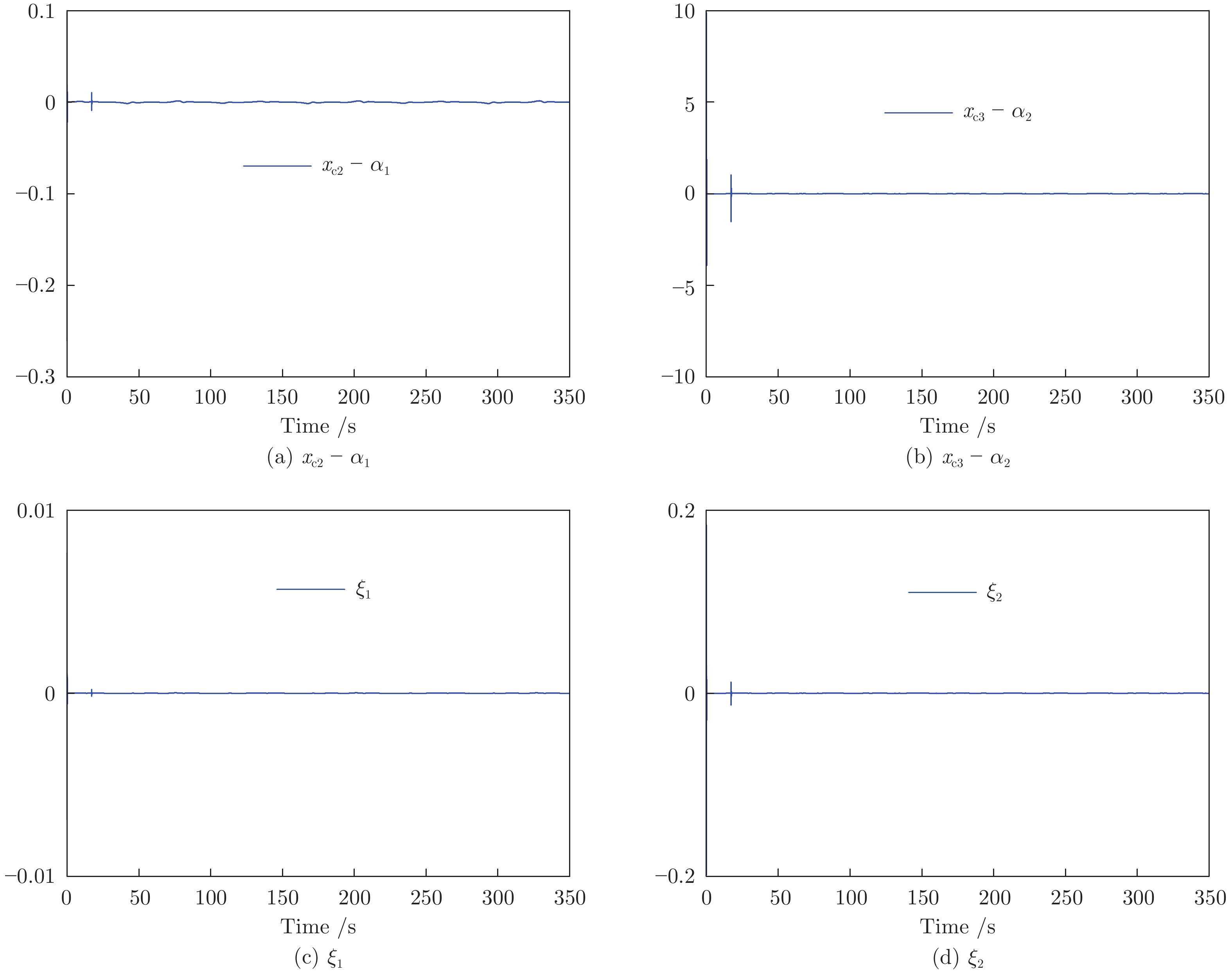 图 8 实验2中命令滤波误差及其补偿信号Fig. 8 Command filtered errors and their compensating signals in Experiment 2
图 8 实验2中命令滤波误差及其补偿信号Fig. 8 Command filtered errors and their compensating signals in Experiment 23.3 实验3: 三阶单关节机器人的控制应用
将所提出的控制方案应用于实际的三阶单关节机器人控制系统[36]中, 以验证其对间歇性执行器故障的补偿能力. 三阶单关节机器人的动态方程为
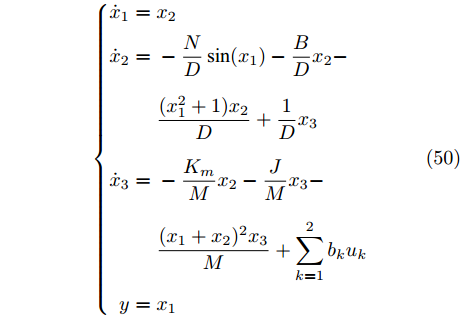
$$ \left\{ \begin{aligned} & D\ddot{q}+B\dot{q}+N\sin(q)+(q^2+1)\dot{q} = \tau\\ & M\dot{\tau}+J\tau+(q+\dot{q})^2\tau = u_1+u_2-K_m\dot{q} \end{aligned}\right. $$ (49) 其中,
$ q $ ,$ \dot{q} $ 和$ \ddot{q} $ 分别表示关节位置、速度和加速度;$ \tau $ 和$ \dot{\tau} $ 表示电机转动角度和角速度;$ u_1 $ 和$ u_2 $ 表示彼此冗余的执行器的输出, 也表示电机的控制输入信号. 附加项$ (q^2+1)\dot{q} $ 和$ (q+\dot{q})^2\tau $ 表示外部干扰或者系统内部未建模动态. 定义$ x_1 = q $ ,$ x_2 = \dot{q} $ ,$ x_3 = \tau $ , 系统 (49) 可重新描述为$$ \left\{\begin{aligned}\dot{x}_1 =\;& x_2\\ \dot{x}_2 =\; &-\frac{N}{D}\sin(x_1)-\frac{B}{D}x_2-\\ &\frac{(x_1^2+1)x_2}{D}+\frac{1}{D}x_3\\ \dot{x}_3 = \;&-\frac{K_m}{M}x_2-\frac{J}{M}x_3-\\ &\frac{(x_1+x_2)^2x_3}{M}+\sum_{k = 1}^2b_ku_k\\ y =\;& x_1 \end{aligned}\right. $$ (50) 其中,
$b_1 = b_2 = 1/M$ . 在仿真中, 系统参数选择为$D = B = 1 $ ,$M = 0.05 $ ,$ K_m = 10 $ ,$ J = 0.5 $ 和$N = 10. $ 执行器故障模型选择为
$$ u_1=\left\{ \begin{array}{*{20}{l}} &6 + 2\cos(3t),& {若}\; t\in[jT^*,(j + 1)T^*)\\ &u_{\mathrm{c}1},&{其他} \end{array} \right.$$ (51) $$ u_2 = \left\{ \begin{array}{l}(0.5+0.3\sin(0.6t))u_{\mathrm{c}2},\\ \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; \; {若}\; t\in[jT^*,(j + 1)T^*)\\ u_{\mathrm{c}2},\; \; \; \; \; \; \; \; \; \; \; \; \; \; \; {其他} \end{array}\right. $$ (52) 其中,
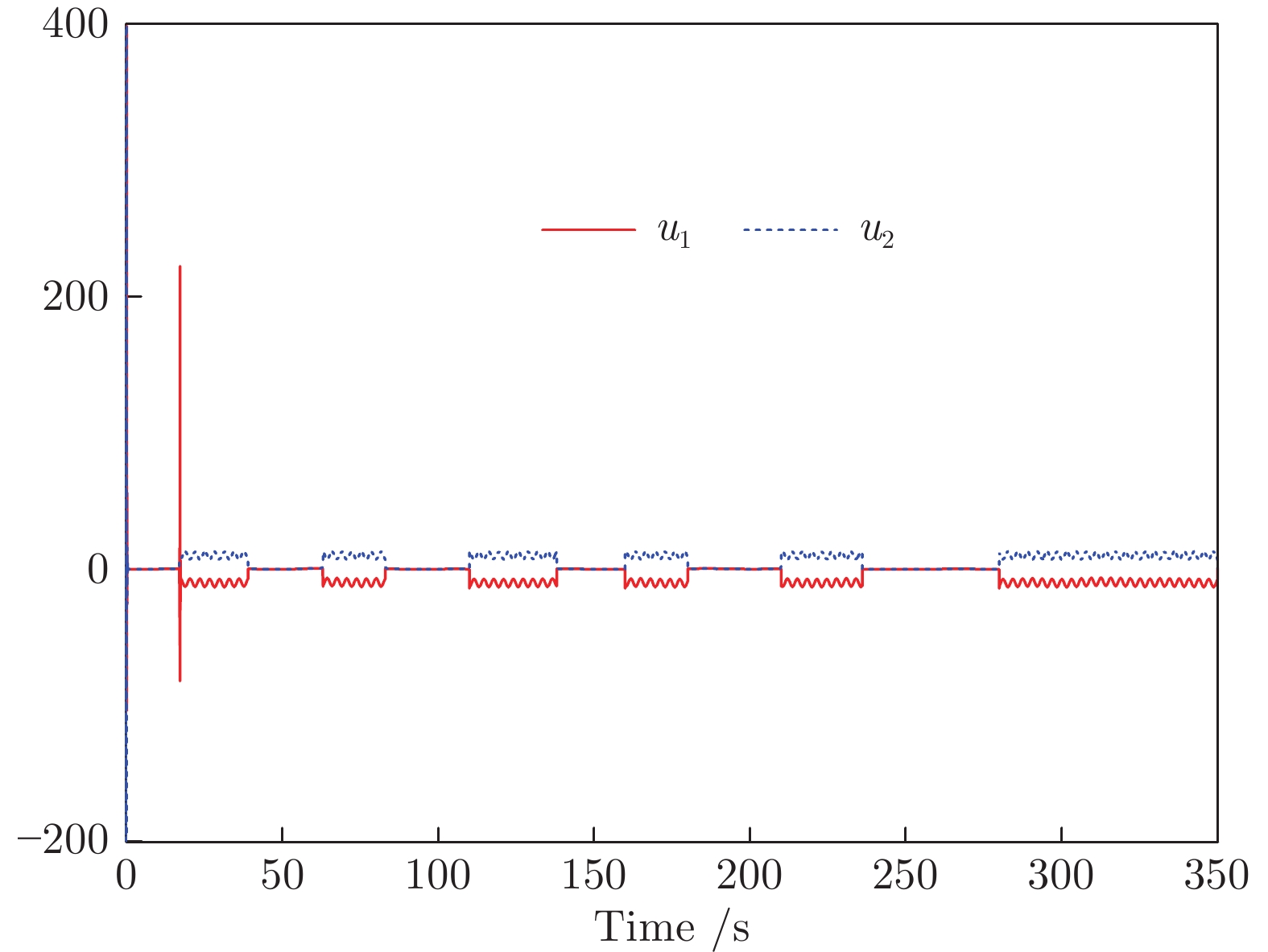
$ j = 1,3,\cdots $ ;$ T = 15 $ . 从式 (51) 和式 (52) 中可看出, 在每个$ jT^*\;{\rm{s}} $ 时间段内, 系统中第1个执行器将锁死在$ 6+2\cos(3t) $ , 而第2个执行器的输出将损失其有效性的 20% ~ 80%, 在其余的时间段内, 两个执行器均运行在无故障情况下.针对系统 (50), 控制律选择式 (8) 和式 (15), 自适应律选择式 (19). 期望轨迹选择为
$ y_{\mathrm{d}} = 0.5\sin(0.1t) +0.8\sin(0.05t)+0.5 $ . 仿真中, 控制方案中的设计参数选择为$ k_1 = k_2 = k_3 = 50 $ ,$ K_2 = K_3 = 80 $ ,$ {\mit{\Gamma}} = 1.5{I}_{18} $ ,$\bar{\theta} = 8 ,$ $ \bar{\bar{\rho}} = 2 $ ,$ \underline{\rho} = 0.1, $ $ \bar{\beta} = 8 $ ,$c = 0.01, $ $ p = 40 $ . 系统初始条件选择为$ \boldsymbol{x}(0) = [0.5,0.2,0.2]^\mathrm{T}$ ,$x_{\mathrm{c}2}(0) = x_{\mathrm{c}3}(0) = 0.2,$ $\xi_1(0) = \xi_2(0) = 0,$ $\hat{\boldsymbol{\theta}}_2(0) = \hat{\boldsymbol{\theta}}_3(0) = \hat{\boldsymbol{\beta}}(0) = 0,$ $\hat{\rho}(0) = 0.5$ . ELM 隐层节点个数选择为$ L_2 = L_3 = 8 $ , 隐层节点参数$ a_2,a_3 $ 和$ b_2,b_3 $ 分别在区间$ [-1,1] $ 和$ [0,1] $ 上随机选择.首先, 图10(a) 表明了系统的输出
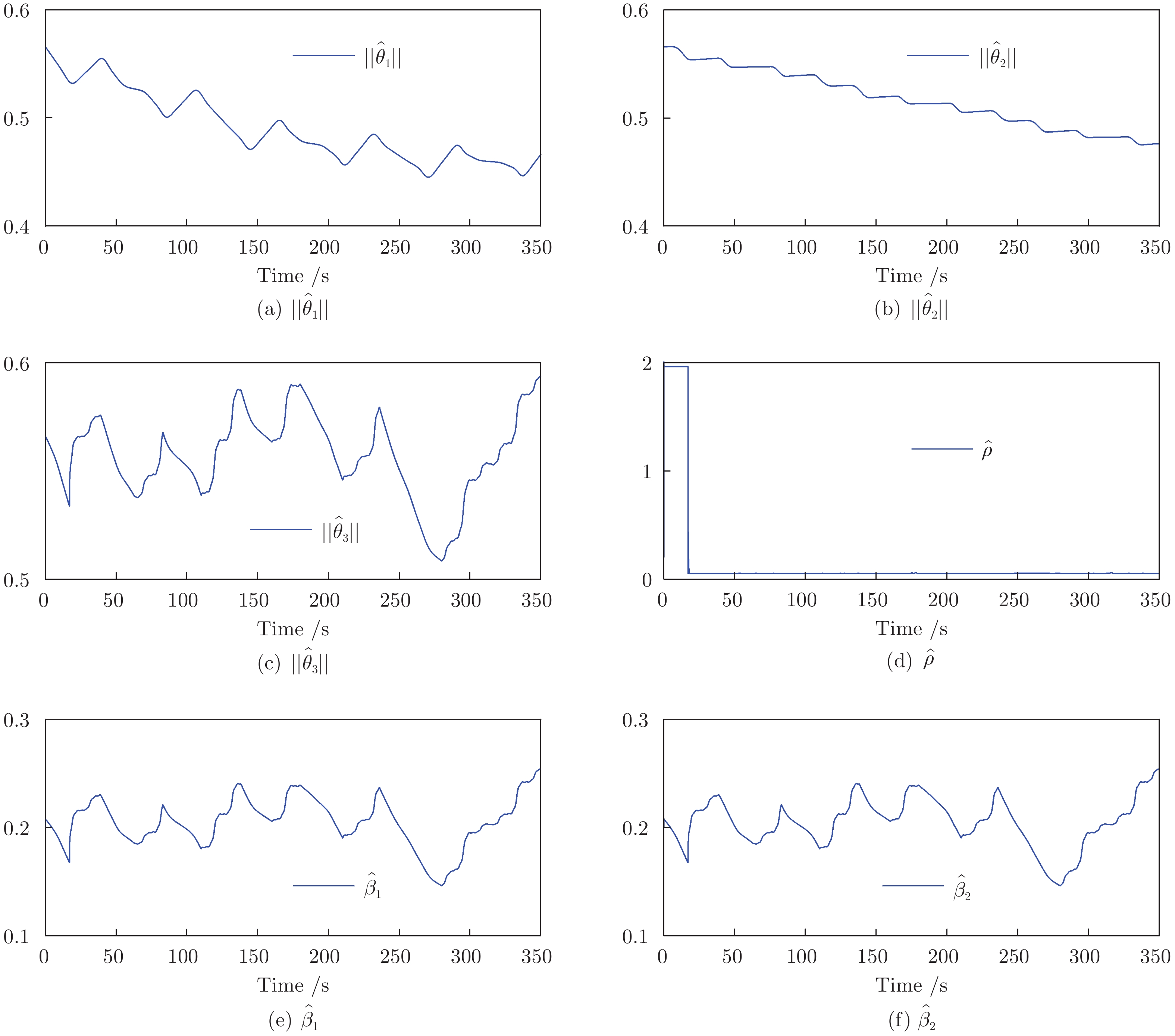
$ y $ 可渐近地收敛到其期望轨迹$ y_{\mathrm{d}} $ 的一个很小的邻域内. 图10(b) 显示了跟踪误差渐近地收敛于零的一个很小的邻域内, 并且增加控制增益常数$ k_1 $ ,$ k_2 $ ,$ k_3 $ 和自适律因子$ {\mit{\Gamma}} $ , 可获得较小的跟踪误差$ \bar{z}_1 $ , 即系统的暂态和稳态指标越好. 其次, 控制输入信号$ u_1 $ ,$ u_2 $ ,$ x_{\mathrm{c}2} $ ,$ x_{\mathrm{c}3} $ ,$ \xi_1 $ ,$ \xi_2 $ 和估计参数$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_3 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 的有界性分别如图11 ~ 13 所示. 从图13(a)和图13(b) 可清楚地看出, 估计参数$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_3 $ 随着故障数量的增加而不断增加. 但是, 基于投影算子的自适应律能够明确地保证$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_3 $ 的有界性. 最后, 从图10 ~ 13 中可看出, 在均匀间隔周期执行器故障的情况下, 所提出的补偿控制方案不仅能够获得预期的跟踪控制指标, 而且保证了闭环系统中所有信号的有界性.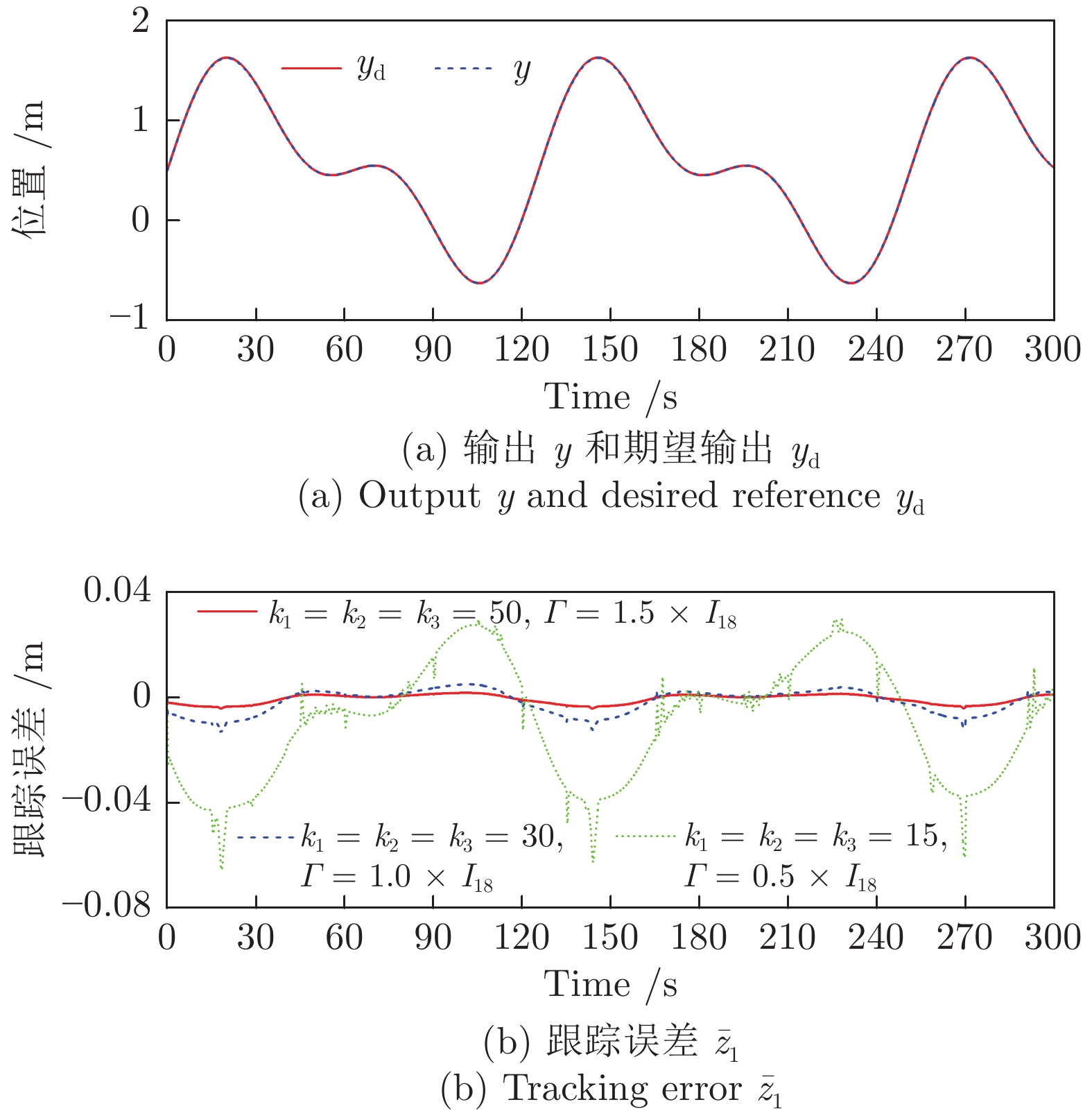 图 10 实验3中输出
图 10 实验3中输出$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 10 Output$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 3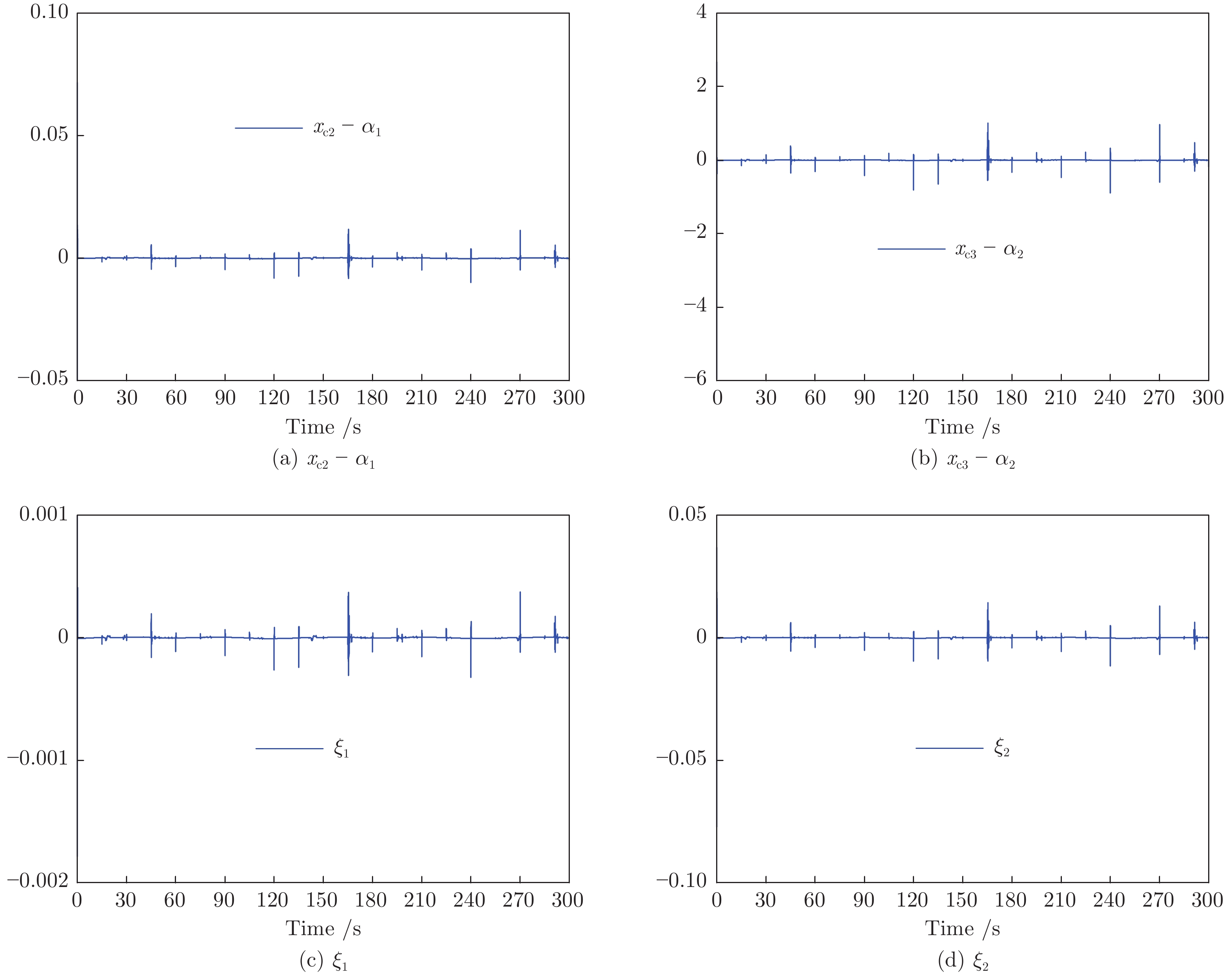 图 12 实验3中命令滤波误差及其补偿信号Fig. 12 Command filtered errors and their compensating signals in Experiment 3
图 12 实验3中命令滤波误差及其补偿信号Fig. 12 Command filtered errors and their compensating signals in Experiment 33.4 实验4: 柔性机器人的控制应用
将所提出的控制方案应用于实际的柔性机器人控制系统[36]中, 以验证其对间歇性执行器故障的补偿能力. 柔性机器人的动态方程可表示为
$$ \left\{\begin{aligned} &I\ddot{q}_1+MgL\sin(q_1)+\\ &\qquad K(q_1-q_2)+\mathrm{e}^{-q_1^2\dot{q}_1^2} = 0\\ &J\ddot{q}_2-K(q_1-q_2)-\sin(q_1q_2+1)\times\\ &\qquad \cos(\dot{q}_1\dot{q}_2+1) = u_1+u_2 \end{aligned}\right. $$ (53) 其中,
$ q_1 $ ,$ \dot{q}_1 $ 和$ \ddot{q}_1 $ 分别表示关节位置、速度以及加速度;$ q_2 $ ,$ \dot{q}_2 $ 和$ \ddot{q}_2 $ 分别表示电机转动角度、角速度以及角加速度;$ I $ 表示柔性力臂的转动惯量;$ J $ 表示电机的转动惯量;$ K $ 表示关节的弹性刚度系数;$ M $ 表示柔性臂的质量;$ L $ 表示柔性臂的长度;$ u_1 $ 和$ u_2 $ 表示彼此冗余的执行器的输出, 也表示电机的控制输入信号. 附加项$ \mathrm{e}^{-q_1^2\dot{q}_1^2} $ 和$ \sin(q_1q_2+ 1)\times \cos(\dot{q}_1\dot{q}_2+1) $ 表示外部干扰或者系统内部未建模动态. 取$ x_1 = q_1 $ ,$ x_2 = \dot{q}_1 $ ,$ x_3 = q_2 $ ,$ x_4 = \dot{q}_2 $ , 则系统 (53) 可重新描述为$$ \left\{ \begin{aligned}\dot{x}_1 =\;& x_2\\ \dot{x}_2 =\;& -\frac{K}{I}x_1-\frac{MgL}{I}\sin(x_1)-\frac{\mathrm{e}^{-x_1^2x_1^2}}{I}+\frac{K}{I}x_3\\ \dot{x}_3 = \;&x_4\\ \dot{x}_4 =\;& \frac{K}{J}(x_1-x_3)+\\ &\frac{\sin(x_1x_3+1)\cos(x_2x_4+1)}{J}+\sum_{k = 1}^2b_ku_k\\ y =\;&x_1 \end{aligned}\right. $$ (54) 其中,
$b_1 = b_2 = 1/J.$ 在仿真中, 系统参数选择为$M = 2.3,$ $ L = 1,$ $g = 9.8,$ $ I = ML^2 ,$ $J = 0.5$ ,$ K = 15.$ 执行器故障模型选择为
$$ u_1=\left\{ \begin{array}{l}14+\cos(0.8t),\\ \;\;\;\;\;\;\;\;\;\;\;\; {若}\; t\in[jT^* + \Delta{T}_i,(j+1)T^* + \Delta{T}_{i+1})\\ u_{\mathrm{c}1},\; \; \; \; \; {其他} \end{array}\right. $$ (55) $$u_2= \left\{ \begin{array}{l}(0.6+0.3\sin(0.3t))u_{\mathrm{c}1},\\ \;\;\;\;\;\;\;\;\;\;\;\; 若\;t\in[jT^* + \Delta{T}_i,(j+1)T^* + \Delta{T}_{i+1})\\ u_{\mathrm{c}2},\; \; \; \; \; {其他} \end{array}\right. $$ (56) 其中,
$ j = 1,3,\cdots $ ;$ T = 25 $ . 在式 (55) 和式 (56) 中, 加入不等间隔的$ 0\leq\Delta{T}_1<\Delta{T}_2<\cdots<\Delta{T}_i< \Delta{T}_{i+1}<\cdots $ , 使得均匀间隔周期执行器故障变为非均匀间隔周期执行器故障. 从式 (55) 和式 (56) 中可看出, 在每个$ [jT^*+\Delta{T}_i,(j+1)T^*+\Delta{T}_{i+1}) \;{\rm{s}}$ 时间段内, 系统中第1个执行器将锁死在$ u_2 = 14+ \cos(0.8t) $ , 而第2个执行器的输出将损失其有效性的 30% ~ 90%. 在其余时间段内, 两个执行器均运行在无故障情况下.针对系统 (54), 控制律选择式 (8) 和式 (15), 自适应律选择式 (19). 期望轨迹选择为
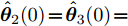
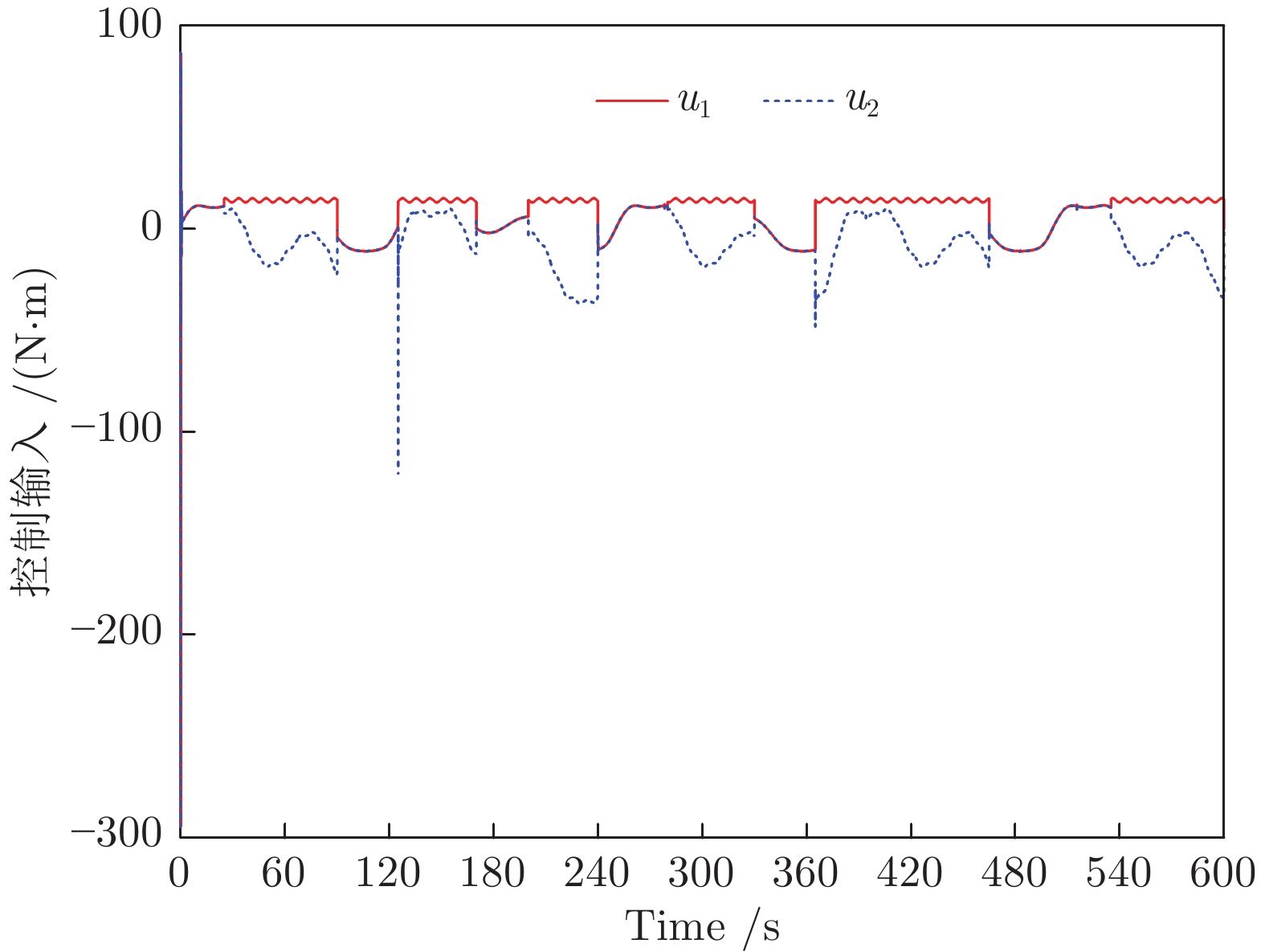
$ y_{\mathrm{d}} = \sin(0.1t)+\sin(0.05t)+0.2 $ . 仿真中, 设计参数选择为 k1 = k2 = k3 = k4 = 20, K2 = K3 = K4 = 80,${\mit{\Gamma}} \;=\; 4{I}_{14}$ ,$ \bar{\theta}\; = \;30 $ ,$ \bar{\bar{\rho}} \;=\; 2 $ ,$ \underline{\rho} \;= \;0.1 $ ,$ \bar{\beta} \;=\; 15 $ ,$ c = 0.001 $ ,$ p = 40 $ ,$ \Delta{T}_1 = 0 \;{\rm{s}}$ ,$ \Delta{T}_2 = 40 \;{\rm{s}}$ ,$ \Delta{T}_3 = $ 50 s,$ \Delta{T}_4 = 70 \;{\rm{s}}$ ,$ \Delta{T}_5 = 75 \;{\rm{s}}$ ,$ \Delta{T}_6 = 90\;{\rm{s}} $ ,$ \Delta{T}_7 =$ 105 s,$ \Delta{T}_8 = 130 \;{\rm{s}}$ ,$ \Delta{T}_9 = 140 \;{\rm{s}}$ ,$ \Delta{T}_{10} = 215\;{\rm{s}} $ ,$\Delta{T}_{11} = 260\;{\rm{s}}$ ,$\Delta{T}_{12} = 300\;{\rm{s}}$ . 系统初始条件选择为$ \boldsymbol{x}(0) = [0.2,0,0,0]^\mathrm{T} $ ,$ x_{\mathrm{c}2}(0) = x_{\mathrm{c}3}(0) = x_{\mathrm{c}4}(0) = \xi_1(0) = \xi_2(0) = \xi_3(0) = 0 $ ,$ \hat{\boldsymbol{\theta}}_2(0) = \hat{\boldsymbol{\theta}}_4(0) = \hat{\rho}(0) = \hat{\boldsymbol{\beta}}(0) = 0.5 $ . ELM 隐含层节点个数选择为$ L_2 = L_4 = 6 $ , 隐含层节点参数$ a_2 $ ,$ a_4 $ 和$ b_2 $ ,$ b_4 $ 分别在区间$ [-1,1] $ 和$ [0,1] $ 上随机选择.首先, 图14(a) 显示了系统的输出
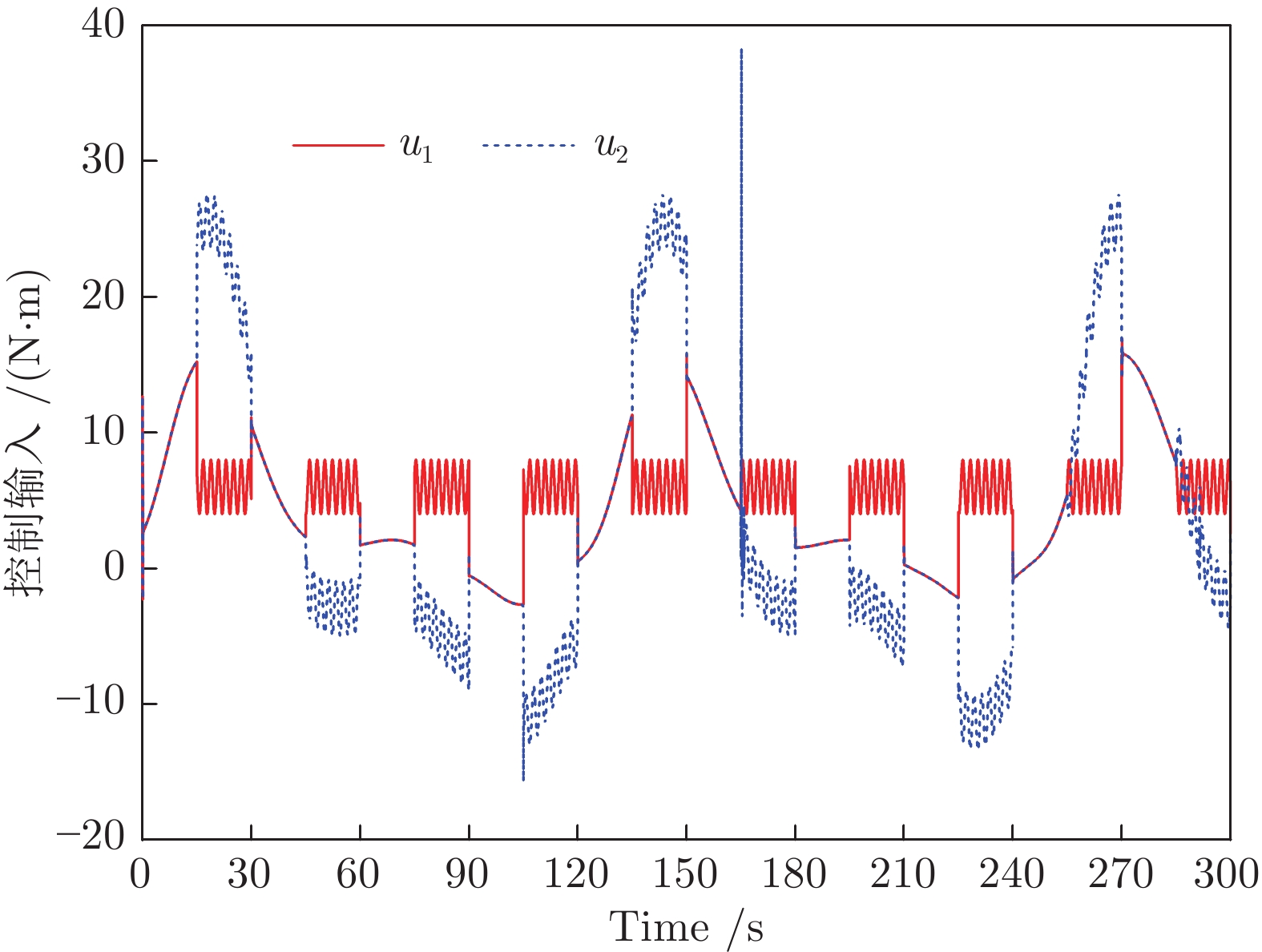
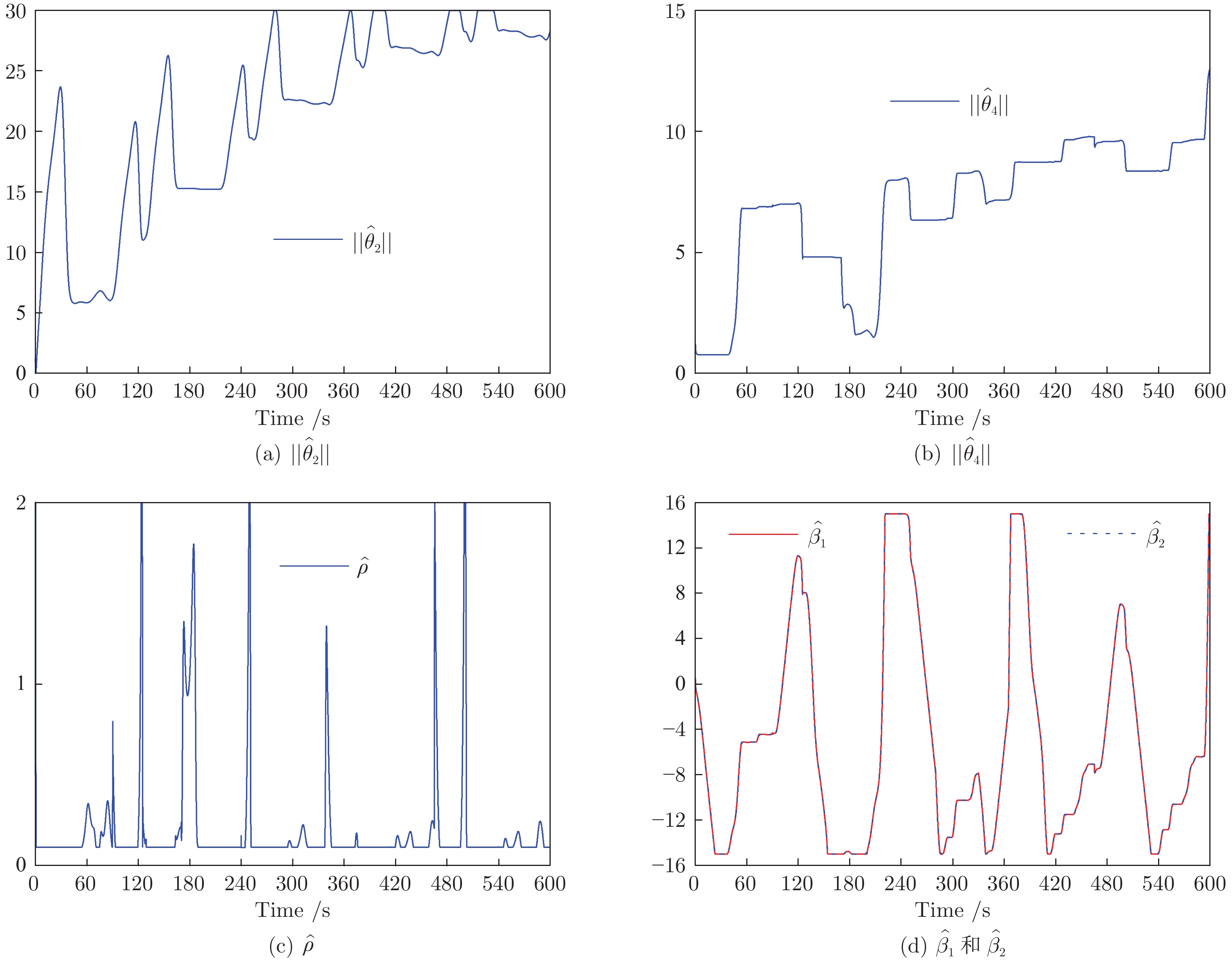
$ y $ 可收敛到其期望输出$ y_{\mathrm{d}} $ 的一个很小的领域内. 从图14(b) 可看出, 跟踪误差$ \bar{z}_1 $ 可渐近地收敛到零的一个很小的领域内. 控制增益参数$ k_1 $ ,$ k_2 $ ,$ k_3 $ ,$ k_4 $ 和自适应律因子$ {\mit{\Gamma}} $ 越大, 跟踪误差$ \bar{z}_1 $ 越小, 即系统的暂态和稳态指标越好. 其次, 控制输入信号$ u_1 $ ,$ u_2 $ , 滤波信号$ x_{\mathrm{c}2} $ ,$ x_{\mathrm{c}3} $ ,$ x_{\mathrm{c}4} $ ,$ \xi_1 $ ,$ \xi_2 $ ,$ \xi_3 $ 和估计参数$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_4 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 有界性如图15 ~ 17 所示. 特别是图17 (a)和图17(b) 显示了估计参数$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_4 $ 随着参数跳变次数的增加而不断增加. 但是, 基于投影算子的自适应律能够明确保证$ \hat{\boldsymbol{\theta}}_2 $ ,$ \hat{\boldsymbol{\theta}}_4 $ ,$ \hat{\rho} $ ,$ \hat{\beta}_1 $ ,$ \hat{\beta}_2 $ 的有界性. 最后, 从图14 ~ 17 中可看出, 在非均匀间隔周期执行器故障的情况下, 所提出的补偿控制器不仅能够驱动系统完成预期的跟踪控制指标, 而且保证了所有闭环信号的有界性.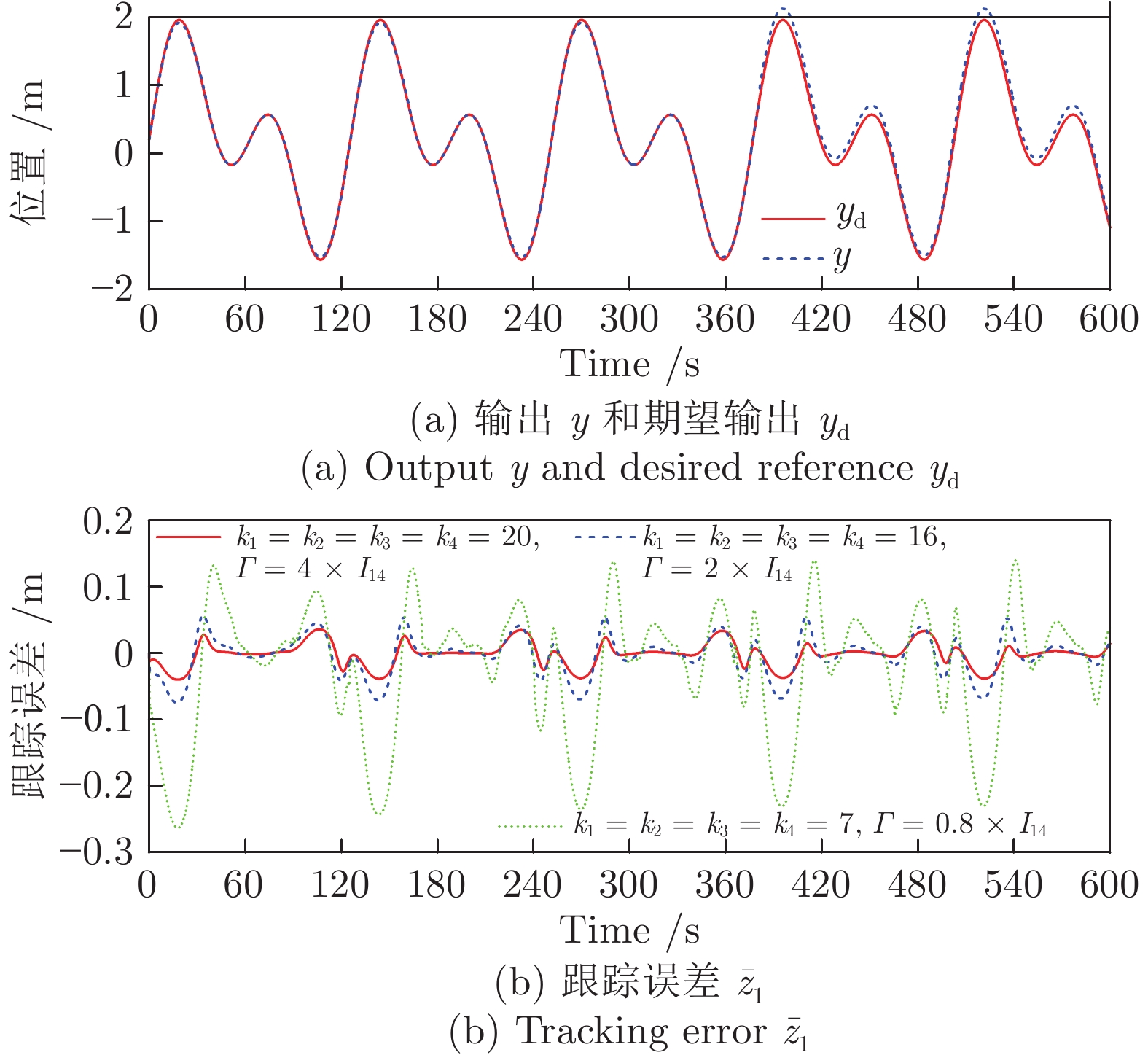 图 14 实验4中输出
图 14 实验4中输出$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 14 Output$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 4 图 16 实验4中命令滤波误差及其补偿信号Fig. 16 Command filtered errors and their compensating signals in Experiment 4
图 16 实验4中命令滤波误差及其补偿信号Fig. 16 Command filtered errors and their compensating signals in Experiment 44. 结束语
本文针对一类不确定严格反馈非线性系统, 提出了一种自适应 CFB 控制方案解决了间歇性执行器故障的补偿问题. 基于投影算子的参数更新律可保证控制器中估计参数的有界性. 即使存在未知参数间歇性跳变的影响, 改进的Lyapunov函数证明了所提出的方案能够保证闭环系统中所有信号的有界性. 同时建立了系统稳定性与Lyapunov 函数跳变幅度, 最小故障时间间隔以及设计参数之间的关系. 进一步, 建立的跟踪误差的暂态和稳态指标显式界说明了通过调节设计参数, 可获得良好的系统暂态和稳态跟踪指标. 最后, 四个仿真实例验证了所提出的控制方案不仅解决了均匀间隔周期执行器故障的补偿问题, 而且解决了非均匀间隔周期执行器故障的补偿问题.
迟滞或者输入量化等未知非线性现象也经常存在于控制系统的执行器中. 因此, 结合高增益观测器技术[32], 针对具有迟滞(或者输入量化)和间歇性执行器故障的系统(1), 设计一种自适应输出反馈控制方案将是下一步的研究重点.
附录A 定理2的证明
证明. 调用式 (31), 式 (25) 定义的 Lyapunov 函数
$ V $ 的导数还满足$$ \dot{V}\leq-k\|\bar{\boldsymbol{z}}\|^2+k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right) \tag{A1}$$ 其中,
$ k $ 的定义见式 (27).在时间间隔
$ [t^q,t^{q+1}) $ 内, 对式 (A1) 两边积分, 并将$ V(t^{(q+1)-}) = V(t^{(q+1)+})-\Delta{V}_q $ 代入, 可得$$ \begin{split} \int_{t^q}^{t^{q+1}}\|\bar{\boldsymbol{z}}(\tau)\|^2\mathrm{d}\tau \leq\; &\frac{1}{k}\bigg[V\left(t^{q+}\right)+\Delta{V}_q-V\left(t^{(q+1)+}\right) + \\ &\int_{t^q}^{t^{q+1}}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{d}\tau\bigg] \end{split}\tag{A2} $$ 对于任意时刻
$T ,$ $n(0,T)$ 表示系统在时间间隔$ [0,T) $ 内发生故障的总次数, 且$ \lim_{T\rightarrow\infty}n(0,T) = \infty $ . 则在时间间隔$ [0,t^{1+}],\cdots,[t^{(n(0,T)-1)+},t^{n(0,T)+}] $ 上, 利用式 (A2), 有如下不等式成立$$ \begin{split} & \int_{0}^{t^1}\|\bar{\boldsymbol{z}}(\tau)\|^2\mathrm{d}\tau\leq\frac{1}{k}\bigg[V(0)+\Delta{V}_1-V\left(t^{1+}\right) + \\ &\qquad\quad\int_{0}^{t^{1}}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{d}\tau\bigg] \end{split}\tag{A3} $$ $$ \vdots $$ $$ \begin{split} &\int_{t^{n(0,T)-1}}^{t^{n(0,T)}}\|\bar{\boldsymbol{z}}(\tau)\|^2\mathrm{d}\tau\leq\frac{1}{k}\bigg[V\left(t^{(n(0,T)-1)+}\right)+ \\ &\qquad\quad\Delta{V}_{n(0,T)}-V\left(t^{n(0,T)+}\right)+ \\ &\qquad\quad\int_{t^{n(0,T)-1}}^{t^{n(0,T)}}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{d}\tau\bigg] \end{split} \tag{A4}$$ 则在时间间隔
$ [0,T) $ 内, 利用式 (A3) 和式 (A4), 有$$ \begin{split} &\frac{1}{T}\int_{0}^{T}\|\bar{\boldsymbol{z}}(\tau)\|^2\mathrm{d}\tau\leq\frac{1}{k}\bigg[\frac{|V(0)-V\left(T^-\right)|}{T} +\frac{\sum\limits_{q = 1}^{n(0,T)}\Delta{V}_q}{T}+ \\ &\qquad\qquad\frac{1}{T}\int_{0}^{T}k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\mathrm{d}\tau\bigg] \end{split}\tag{A5} $$ 另一方面, 考虑式 (39) 以及
$ (1\;-\;{\rm{e}}^{-kT})/T\;\leq\;{k} $ 和$ \lim_{T\rightarrow\infty}(1/T)[\Delta\bar{\vartheta})/(1-{\rm{e}}^{-kT^*})] = 0 $ , 有$$ \begin{split} & \frac{\big|V(0)-V\left(T^-\right)\big|}{T}\leq\frac{1-{\rm{e}}^{-kT}}{T} \times \\ &\qquad \bigg[V(0)+\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\bigg] \leq \\ &\qquad kV(0)+k\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right)\end{split}\tag{A6}$$ 将式 (38) 和式 (A6) 代入式 (A5), 可得
$$ \begin{split} &\frac{1}{T}\int_{0}^{T}\|\bar{\boldsymbol{z}}(\tau)\|^2\mathrm{d}\tau\leq{V}(0) + \\ &\qquad\qquad \frac{1}{k}\frac{n(0,T)\Delta\bar{\vartheta}}{T}+2\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right) \end{split} \tag{A7}$$ 注意到
$ n(0,T)T^*\leq{T} $ , 则式 (A7) 满足$$ \begin{split} & \frac{1}{T}\int_{0}^{T}\|\bar{\boldsymbol{z}}(\tau)\|^2\mathrm{d}\tau\leq V(0) + \\ &\qquad\quad\frac{\Delta\bar{\vartheta}}{kT^*}+2\delta\left(k^{-1},\|{{\mit{\Gamma}}^{-1}}\|,\bar{\vartheta}\right) \end{split} \tag{A8}$$ 利用轨迹初始化技术[26-27], 可设置
$ \bar{z}_i(0) = 0 $ ,$ i = 1, \cdots,n $ , 即令$ x_1(0) = y_d(0) $ 和$ x_i(0) = x_{\mathrm{c}i}(0) $ ,$ i = 2,\cdots,n $ . 因此,$V(0)$ 可表述为$$ V(0) = \tilde{\boldsymbol{\vartheta}}^{\mathrm{T}}(0){\mit{\Gamma}}^{-1}\tilde{\boldsymbol{\vartheta}}(0)\tag{A9} $$ 将式 (A9) 代入式 (A8), 跟踪误差
$ \bar{\boldsymbol{z}}(t) $ 的均方根型界可被建立. □ -
图 1 控制结构图 (
$x_{\mathrm{c}i}$ 和$\dot{x}_{\mathrm{c}i}$ ,$i = 2,\cdots,n$ , 为滤波器 (11) 的输出.$\alpha_i$ ,$i = 1,\cdots,n$ , 为式 (12) ~ (14) 中定义的虚拟控制律.$\xi_i$ ,$i = 1,\cdots,n-1$ 为式 (17) 中定义的滤波误差补偿信号)Fig. 1 Control block diagram (
$x_{\mathrm{c}i}$ and$\dot{x}_{\mathrm{c}i}$ for$i = $ $ 2, \cdots,n$ are the outputs of the filter (11).$\alpha_i$ for$i = $ $ 1,\cdots,n$ is virtual control law defined in (12) ~ (14).$\xi_i$ for$i = 1,\cdots, $ $ n-1$ is the compensating signal of the filtered error defined in (17))
图 2 实验1中输出
$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 2 Output
$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 1
图 4 实验1中命令滤波误差及其补偿信号
Fig. 4 Command filtered errors and their compensating signals in Experiment 1
图 6 实验2中输出
$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 6 Output
$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 2
图 8 实验2中命令滤波误差及其补偿信号
Fig. 8 Command filtered errors and their compensating signals in Experiment 2
图 10 实验3中输出
$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 10 Output
$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 3
图 12 实验3中命令滤波误差及其补偿信号
Fig. 12 Command filtered errors and their compensating signals in Experiment 3
图 14 实验4中输出
$y $ , 期望轨迹$y_{\mathrm{d}} $ 及跟踪误差$\bar{z}_1 $ Fig. 14 Output
$y $ , desired trajectory$y_{\mathrm{d}} $ and tracking error$\bar{z}_1 $ in Experiment 4
图 16 实验4中命令滤波误差及其补偿信号
Fig. 16 Command filtered errors and their compensating signals in Experiment 4
-
[1] Tao G, Chen S, Tang X, Joshi S. M. Adaptive control of systems with actuator failures. Springer Science and Business Media, 2013. [2] Ahmed-Zaid F, Ioannou P, Gousman K, et al. Accommodation of failures in the F-16 aircraft using adaptive control. IEEE Control Systems Magazine, 1991, 11(1): 73−78. doi: 10.1109/37.103360 [3] Bodson M, Groszkiewicz J E. Multivariable adaptive algorithms for reconfigurable flight control. IEEE Transactions on Control Systems Technology, 1997, 5(2): 217−229. doi: 10.1109/87.556026 [4] Ye D, Yang G H. Adaptive fault-tolerant tracking control against actuator faults with application to flight control. IEEE Transactions on Control Systems Technology, 2006, 14(6): 1088−1096. doi: 10.1109/TCST.2006.883191 [5] Yang G H, Ye D. Reliable ${{\cal H}_\infty }$ control of linear systems with adaptive mechanism. IEEE Transactions on Automatic Control, 2009, 55(1): 242−247.[6] 金小峥, 杨光红, 常晓恒, 车伟伟. 容错控制系统鲁棒 ${{\cal H}_\infty }$ 和自适应补偿设计. 自动化学报, 2013, 39(1): 31−42 doi: 10.1016/S1874-1029(13)60004-XJin Xiao-Zheng, Yang Guang-Hong, Chang Xiao-Heng, Che Wei-Wei. Robust fault-tolerant${{\cal H}_\infty }$ control with adaptive compensation. Acta Automatica Sinica, Acta Automatica Sinica, 39(1): 31−42. doi: 10.1016/S1874-1029(13)60004-X[7] Tao G, Joshi S M, Ma X. Adaptive state feedback and tracking control of systems with actuator failures. IEEE Transactions on Automatic Control, 2001, 46(1): 78−95. doi: 10.1109/9.898697 [8] Xu B, Guo Y, Yuan Y, Fan Y, Wang D. Fault-tolerant control using command-filtered adaptive backstepping technique: Application to hypersonic longitudinal flight dynamics. International Journal of Adaptive and Control Signal Processing., 2016, 30(4): 553−577. doi: 10.1002/acs.2596 [9] Tang X, Tao G, Joshi S M. Adaptive actuator failure compensation for parametric strict feedback systems and an aircraft application. Automatica, 2003, 39(11): 1975−1982. doi: 10.1016/S0005-1098(03)00219-X [10] Tang X, Tao G, Joshi S M. Adaptive actuator failure compensation for nonlinear MIMO systems with an aircraft control application. Automatica, 2007, 43(11): 1869−1883. doi: 10.1016/j.automatica.2007.03.019 [11] Wang W, Wen C. Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance. Automatica, 2010, 46(12): 2082−2091. doi: 10.1016/j.automatica.2010.09.006 [12] Zhai D, An L, Li J, Zhang Q. Adaptive fuzzy fault-tolerant control with guaranteed tracking performance for nonlinear strict-feedback systems. Fuzzy Sets and Systems, 2016, 302: 82−100. doi: 10.1016/j.fss.2015.10.006 [13] Chakravarty A, Nizami T K, Kar I, Mahanta C. Adaptive Compensation of Actuator Failures using Multiple Models. IFAC-PapersOnLine, 2017, 50(1): 10350−10356. doi: 10.1016/j.ifacol.2017.08.1681 [14] Li Y X, Yang G H. Fuzzy adaptive output feedback faulttolerant tracking control of a class of uncertain nonlinear systems with nonaffine nonlinear faults. IEEE Transactions on Fuzzy Systems, 2016, 24(1): 223−234. doi: 10.1109/TFUZZ.2015.2452940 [15] Li Y, Sun K, Tong S. Observer-based adaptive fuzzy faulttolerant optimal control for SISO nonlinear systems. IEEE Transactions on Cybernetics, 2019, 49(2): 649−661. doi: 10.1109/TCYB.2017.2785801 [16] Wu C, Liu J, Xiong Y, Wu L. Observer-based adaptive faulttolerant tracking control of nonlinear nonstrict-feedback systems. IEEE Transactions on Neural Networks and Learning systems, 2017, 29(7): 3022−3033. [17] Zhao K, Song Y, Shen Z. Neuroadaptive fault-tolerant control of nonlinear systems under output constraints and actuation faults. IEEE Transactions on Neural Networks and Learning systems, 2016, 29(2): 286−298. [18] Liu L, Liu Y J, Tong S. Neural networks-based adaptive finite-time fault-tolerant control for a class of strict-feedback switched nonlinear systems. IEEE Transactions on Cybernetics, 2019, 49(7): 2536−2545. doi: 10.1109/TCYB.2018.2828308 [19] 张绍杰, 吴雪, 刘春生. 执行器故障不确定非线性系统最优自适应输出跟踪控制. 自动化学报, 2018, 44(12): 2188−2197Zhang Shao-Jie, Wu Xue, Liu Chun-Sheng. Optimal adaptive output tracking control for a class of uncertain nonlinear systems with actuator failures. Acta Automatica Sinica, 2018, 44(12): 2188−2197. [20] Wang W, Wen C. Adaptive compensation for infinite number of actuator failures or faults. Automatica, 2011, 47(10): 2197−2210. doi: 10.1016/j.automatica.2011.08.022 [21] Lai G, Liu Z, Chen C L P, Zhang Y, Chen X. Adaptive compensation for infinite number of time-varying actuator failures in fuzzy tracking control of uncertain nonlinear systems. IEEE Transactions on Fuzzy Systems, 2018, 26(2): 474−486. doi: 10.1109/TFUZZ.2017.2686338 [22] Lai G, Wen C, Liu Z, Zhang Y, Chen C P, Xie S. Adaptive compensation for infinite number of actuator failures based on tuning function approach. Automatica, 2018, 87: 365−374. doi: 10.1016/j.automatica.2017.07.014 [23] Xing L, Wen C, Liu Z, Su H, Cai J. Adaptive compensation for actuator failures with event-triggered input. Automatica, 2017, 85: 129−136. doi: 10.1016/j.automatica.2017.07.061 [24] Jing Y H, Yang G H. Neural-network-based adaptive faulttolerant tracking control of uncertain nonlinear time-delay systems under output constraints and infinite number of actuator faults. Neurocomputing, 2018, 272: 343−355. doi: 10.1016/j.neucom.2017.07.009 [25] Yang H, Jiang B, Zhang Y. Tolerance of intermittent faults in spacecraft attitude control: switched system approach. IET Control Theory & Applications, 2012, 6(13): 2049−2056. [26] Krstic M, Kanellakopoulos I, Kokotovic V. Nonlinear and Adaptive Control Design. New York: Wiley, 1995. [27] Wen C, Zhou J. Decentralized adaptive stabilization in the presence of unknown backlash-like hysteresis. Automatica, 2007, 43(3): 426−440. doi: 10.1016/j.automatica.2006.10.012 [28] Wang C, Wen C, Lin Y. Adaptive actuator failure compensation for a class of nonlinear systems with unknown control direction. IEEE Transactions on Automatic Control, 2016, 62(1): 385−392. [29] Lai G, Wen C, Liu Z, Zhang Y, Chen C P, Xie S. Adaptive compensation for infinite number of actuator failures/faults using output feedback control. Information Sciences, 2017, 399: 1−12. doi: 10.1016/j.ins.2017.02.022 [30] Dong W, Farrell J A, Polycarpou M M, et al. Command filtered adaptive backstepping. IEEE Transactions on Control Systems Technology, 2012, 20(3): 566−580. doi: 10.1109/TCST.2011.2121907 [31] Zhao Y, Farrell J A. Localized adaptive bounds for approximation-based backstepping. Automatica, 2008, 44(10): 2607−2613. doi: 10.1016/j.automatica.2008.02.013 [32] Khalil H K. Nonlinear Systems (3rd Edition). NJ: Prentice-Hall, 2002. [33] Huang G B, Zhu Q Y, Siew C K. Extreme learning machine: theory and applications. Neurocomputing, 2006, 70(1-3): 489−501. doi: 10.1016/j.neucom.2005.12.126 [34] Huang G B, Chen L, Siew C K. Universal approximation using incremental constructive feedforward networks with random hidden nodes. IEEE Transactions on Neural Networks, 2006, 17(4): 879−892. doi: 10.1109/TNN.2006.875977 [35] Pomet J B, Praly L. Adaptive nonlinear regulation: Estimation from the Lyapunov equation. IEEE Transactions on Automatic Control, 1992, 37(6): 729−740. doi: 10.1109/9.256328 [36] Yang Y, Feng G, Ren J. A combined backstepping and smallgain approach to robust adaptive fuzzy control for strictfeedback nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2004, 34(3): 406−420. doi: 10.1109/TSMCA.2004.824870 期刊类型引用(1)
1. 王敏,林梓欣,王聪,杨辰光. 基于外环速度补偿的封闭机器人确定学习控制. 自动化学报. 2023(09): 1904-1914 .  本站查看
本站查看其他类型引用(3)
-































































































































































 下载:
下载:













































































































































































































































































































































































































































































































































































































































 下载:
下载:



计量
- 文章访问数: 1155
- HTML全文浏览量: 420
- PDF下载量: 397
- 被引次数: 4
