

The Research on ACP-based Modeling and Computational Experiment for Cyber Movement Organizations
-
摘要: 由互联网促成的社会运动组织一经出现, 就受到了广大社会学者以及计算机领域专家的广泛关注. 一方面, 互联网特别是移动互联网在整合信息、引发共振、实时分享及高度互动等方面的特性, 为网民行为的大规模快速聚集提供了直通渠道, 使得多角度超视距观察并研究在线人群复杂行为及其组织特性成为可能; 另一方面, 这一研究在社会化媒体营销、共享经济、非军事组织行动中的应用意义愈加显著. 本文引入群体行为动力学和社会运动组织理论的研究, 提出基于ACP的动态网民群体运动组织(Cyber movement organizations, CMOs)研究方法. 本文工作首先使用多智能体建模方法构造双层结构的人工社区模型, 以此为基础对动态网民的个体以及群体动态组织行为展开计算实验探讨, 重点阐释了社区用户的交互行为机制及群体组织活动的建模机制, 为揭示微观个体简单行为对于宏观群体复杂涌现现象的影响奠定基础.
-
关键词:
- 社会网络 /
- 多智能体 /
- 社会运动组织 /
- 动态网民群体运动组织
Abstract: Once it appeared, the cyber-enabled social movement organizations (CeSMOs) became an instant concern of the majority of scholars in sociology and computer science. On the one hand, the Internet, especially the mobile Internet, with characteristics such as information integrating, resonance causing, real time sharing and high interaction, provides a direct channel for the large-scale and rapid aggregation of human behaviors. This makes it possible to observe and study the complex behavior of online crowds and their organizational features. On the other hand, this research plays an increasingly significant role in social media marketing, sharing economy and non-military organization actions. In this paper, we introduce the studies in crowd behavioral dynamics and social movement organizations, and propse the ACP-based CMOs reseach method. Firstly, an artificial community with a double-layer structure is designed based on multi-agent modeling method. Secondly, the dynamics of organizational behaviors of netizens and online crowds are analyzed by computational experiments. Thus, the interactive behavioral mechanism of community crowds and the mechanism modeling of crowd organizational activities are emphatically discussed, laying a foundation for revealing the influence of simple behavioral rules of micro individuals on complex emergent phenomena of macro crowds.1) 收稿日期 2019-09-06 录用日期 2020-01-09 Manuscript received September 6, 2019; accepted January 9, 2020 国家自然科学基金项目(61702519), 中国科协青年人才托举工程(2017QNRC001), 英特尔智能网联汽车大学合作研究中心项目(ICRI-IACV), 北京市科委项目(Z181100008918007)资助 Supported by National Natural Science Foundation of China (61702519), Young Elite Scientists Sponsorship Program of China Association of Science and Technology (2017QNRC001), Intel Collaborative Research Institute for Intelligent and Automated Connected Vehicles ( ICRI-IACV), and Beijing Municipal Science & Technology Commission (Z181100008918007) 本文责任编委 莫红 Recommended by Associate Editor MO Hong2) 1. 中国科学院自动化研究所复杂系统管理与控制国家重点实验室 北京 100190 2. 青岛智能产业技术研究院 青岛 266000 3. 青岛慧拓机器智能有限公司 青岛 266000 4. 中国科学院大学 北京 100049 5. 北京三快在线科技有限公司 北京 100083 6. 国防科学技术大学军事计算实验与平行系统技术研究中心 长沙 410073 1. The State Key Laboratory for Management and Control of Complex Systems, Institute of Automation, Chinese Academy of Sciences, Beijing 100190 2. Qingdao Academy of Intelligent Industries, Qingdao 266000 3. Waytous Inc., Qingdao 266000 4. University of Chinese Academy of Sciences, Beijing 100049 5. Beijing Sankuai Online Technology Co., Ltd., Beijing 100083 6. The Research Center for Military Computational Experiments and Parallel Systems Technology, National University of Defense Technology, Changsha 410073 -

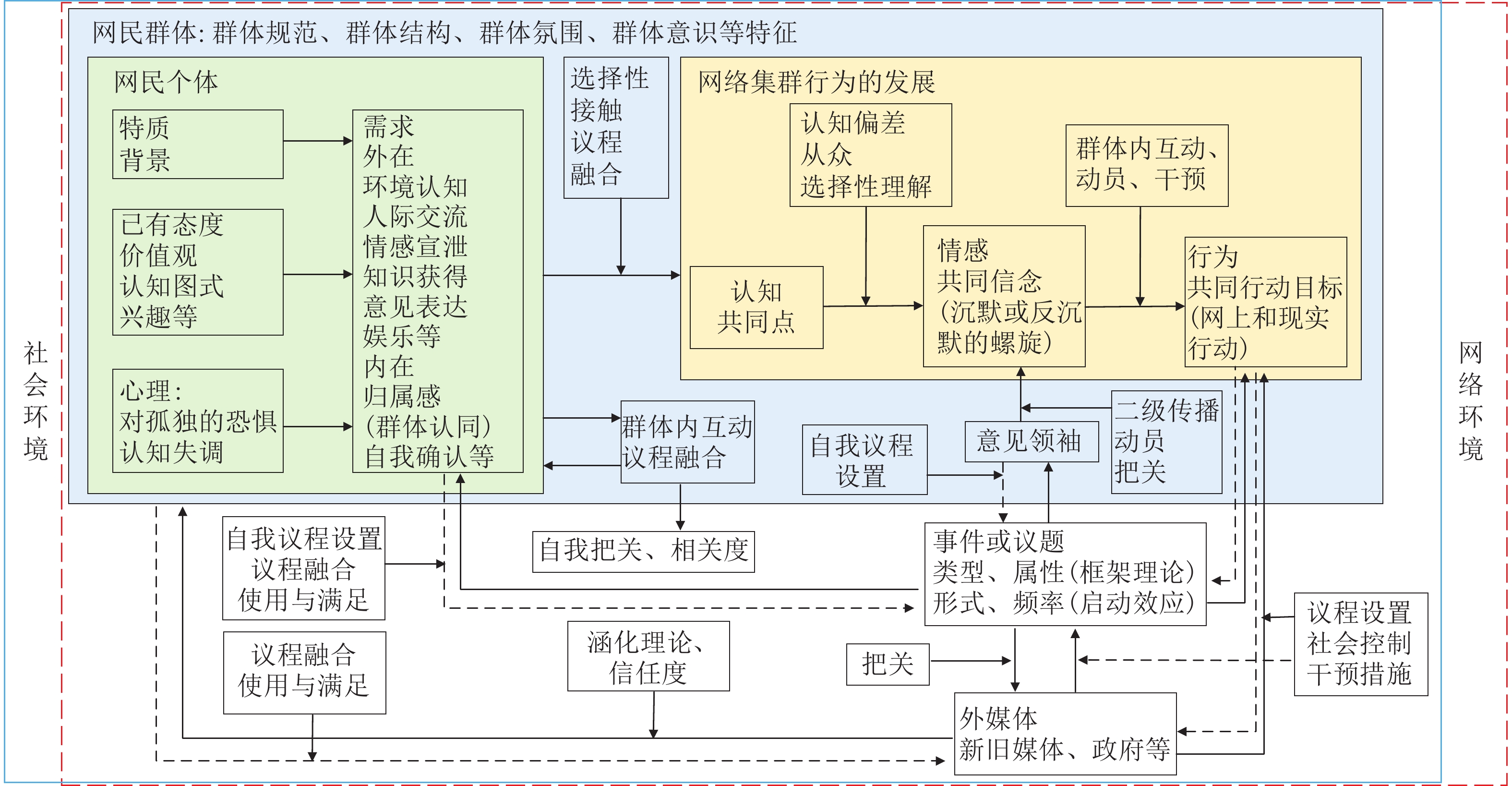
图 3 CMOs的人工社会建模和计算实验评估框架
Fig. 3 The artificial society modeling and computational experiment evaluation framework for CMOs

图 6 基于多智能体建模的网络社区计算实验框架
Fig. 6 Computational experiment framework of network community based on multi-agent modeling
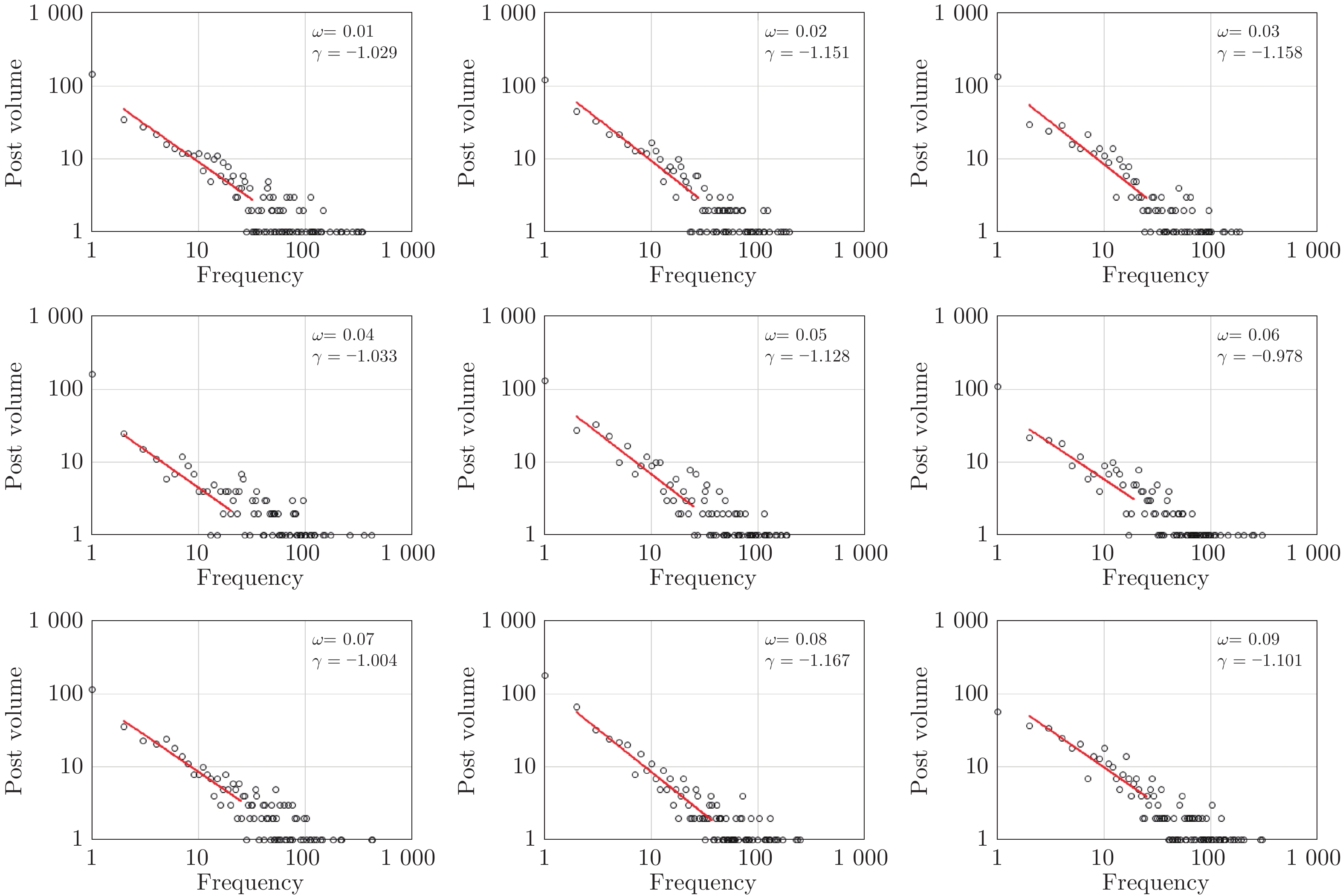
图 7 兴趣相似度阈值ω变化时, 群体发帖行为的分布情况
Fig. 7 The distribution of crowd posting behavior when ω changes
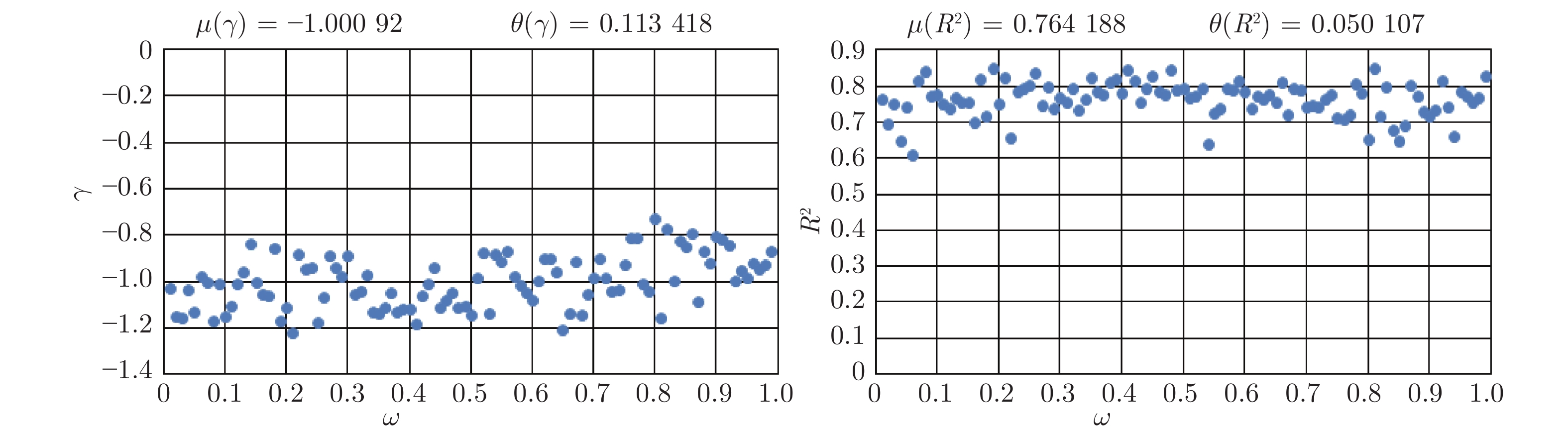
图 8 兴趣相似度阈值ω取[0.01,0.99]时,群体发帖行为分布的参数变化情况
Fig. 8 The distribution of crowd posting behavior when ω changes
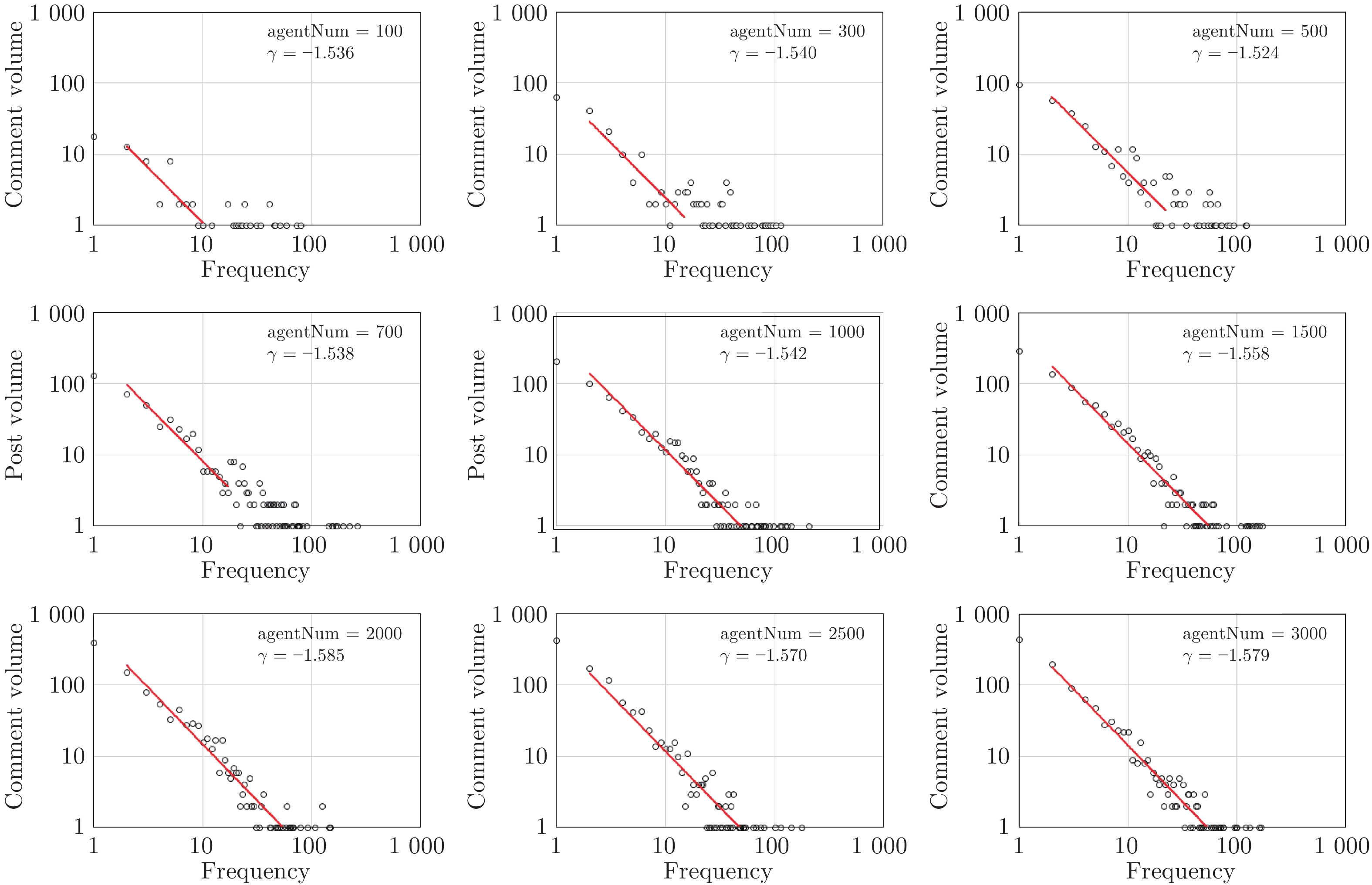
图 9 初始智能体数量发生变化时,群体评论行为的分布情况
Fig. 9 The distribution of crowd comment behavior when the number of initial agents changes
表 1 个体知识相似度阈值
$\omega$ 对于群体发帖行为分布的影响实验参数Table 1 Computational experimental parameters for the experiment on the influence of crowd behavior distribution by individual knowledge similarity threshold
$\omega$ Parameters Values $\omega$ $0.01\sim 0.09$ $\varphi$ $0.5$ ${Max\_A}_a$ $p({Max\_A}_a=X)=0.1$ ,$X=1.1, 1.2,\cdots,2.0$ $GrowthRate_a$ $p(gr_a = Y) = 0.1$ ,$Y = 0.01, 0.02, \cdots, 0.1$ Initial num of Agents $3\;000$ Num of new Agents added at each time step 30 $Knowledge$ $[a,z]$ $|{AK\_Value}^{T_l}_{a}|=|TV\_Theme^{T_l}_{k}|$ $26$ $value_{ak\_\omega}$ $p(value_{ak\_\omega} = Z)=0.1$ ,$Z=0.05, 0.1, \cdots, 0.5$ C $10$ Time $1\;000$  下载: 导出CSV
下载: 导出CSV
表 2 初始智能体数量变化对群体评论行为影响的实验参数
Table 2 Computational experimental parameters of the effect crowd comment behavior by the number of initial agents
Parameters Values ${Max\_A}_a$ $p({Max\_A}_a=X)=0.1$ ,$X=1.1, 1.2,\cdots,2.0$ $GrowthRate_a$ $p(gr_a = Y) = 0.1$ ,$Y = 0.01, 0.02, \cdots, 0.1$ Initial num of Agents $100\sim 3\;000$ Num of new Agents added at each time step 30 Number of Topics 1 000 $Knowledge$ $[a,z]$ $|{AK\_Value}^{T_l}_{a}|=|TV\_Theme^{T_l}_{k}|$ $26$ $value_{ak\_\omega}$ $p(value_{ak\_\omega} = Z)=0.1$ ,$Z=0.05, 0.1, \cdots, 0.5$ $c_1$ $0.9$ C $10$ Time $1\;000$
下载: 导出CSV
-
[1] 1 Sökjer-Petersen M. The role of grassroot leaders in building networks and organizing learning groups. Nordic Psychology, 2010, 62(1): 4−23 doi: 10.1027/1901-2276/a000002 [2] 2 Gu K, Liu D X, Wang K M. Social community detection scheme based on social-aware in mobile social networks. IEEE Access, 2019, 7: 173407−173418 doi: 10.1109/ACCESS.2019.2956149 [3] 3 Cao J X, Liu W J, Cao B W, Wang P, Li S C, Liu B, Iqbal M. Social relationships and temp-spatial behaviors based community discovery to improve cyber security practices. IEEE Access, 2019, 7: 105973−105986 doi: 10.1109/ACCESS.2019.2931937 [4] 4 Roy S, Dey P, Kundu D. Social network analysis of cricket community using a composite distributed framework: from implementation viewpoint. IEEE Transactions on Computational Social Systems, 2018, 5(1): 64−81 doi: 10.1109/TCSS.2017.2762430 [5] 5 Zaamout K, Barker K. Structure of crowdsourcing community networks. IEEE Transactions on Computational Social Systems, 2018, 5(1): 144−155 doi: 10.1109/TCSS.2017.2768325 [6] 6 Zhang X L, Liu J, Li J, Liu L X. Large-scale dynamic social network directed graph K-In&Out-degree anonymity algorithm for protecting community structure. IEEE Access, 2019, 7: 108371−108383 doi: 10.1109/ACCESS.2019.2933151 [7] 7 Lazer D, Pentland A, Adamic L, Aral S, Barabasi A L, Brewer D, et al. Computational social science. Science, 2009, 323(5915): 721−723 doi: 10.1126/science.1167742 [8] 8 Sundaram H, Lin Y, Choudhury M D, Kelliher A. Understanding community dynamics in online social networks: a multidisciplinary review. IEEE Signal Processing Magazine, 2012, 29(2): 33−40 [9] 9 Zhou Y, Guan X, Zheng Q, Sun Q, Zhao J. Group dynamics in discussing incidental topics over online social networks. IEEE Network, 2010, 24(6): 42−47 [10] 10 Feng X, Wang Y, Yu H, Luo F. A novel intelligence algorithm based on the social group optimization behaviors. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(1): 65−76 [11] 王飞跃. 基于社会计算和平行系统的动态网民群体研究. 上海理工大学学报, 2011, 33(1): 8−17 doi: 10.3969/j.issn.1007-6735.2011.01.00211 Wang Fei-Yue. Study on cyber-enabled social movement organizations based on social computing and parallel systems. Journal of University of Shanghai for Science and Technology, 2011, 33(1): 8−17 doi: 10.3969/j.issn.1007-6735.2011.01.002 [12] 12 Sajadi S H, Fazli M, Habibi J. The affective evolution of social norms in social networks. IEEE Transactions on Computational Social Systems, 2018, 5(3): 727−735 doi: 10.1109/TCSS.2018.2855417 [13] 13 Ye M B, Liu J, Anderson B D O, Yu C B, Basar T. Evolution of social power in social networks with dynamic topology. IEEE Transactions on Automatic Control, 2018, 63(11): 3793−3808 doi: 10.1109/TAC.2018.2805261 [14] 14 Shuai H H, Shen C Y, Yang D N, Lan Y F C, Lee W C, Yu P S, et al. A comprehensive study on social network mental disorders detection via online social media mining. IEEE Transactions on Knowledge and Data Engineering, 2018, 30(7): 1212−1225 doi: 10.1109/TKDE.2017.2786695 [15] 15 Wang W Y, He Z P, Shi P, Wu W W, Jiang Y C, An B, et al. Strategic social team crowdsourcing: forming a team of truthful workers for crowdsourcing in social networks. IEEE Transactions on Mobile Computing, 2019, 18(6): 1419−1432 doi: 10.1109/TMC.2018.2860978 [16] 16 Chopra A K, Artikis A, Bentahar J, Colombetti M, Dignum F, Fornara N, et al. Research directions in agent communication. ACM Transactions on Intelligent Systems and Technology, 2012, 4(2): Article No.20 [17] Jiao Y, Liu Y H, Wang J, Zhu J Q. Impact of habitual behaviors on human dynamics and spreading process. In: Proceedings of the 5th International ICST Conference on Communications and Networking in China. Beijing, China: IEEE, 2010. 25−27 [18] Penaloza C I, Mae Y, Ohara K, Arai T. Social human behavior modeling for robot imitation learning. In: Proceedings of 2012 IEEE International Conference on Mechatronics and Automation. Chengdu, China: IEEE, 2012. 457−462 [19] 19 Vazquez A, Racz B, Lukacs A, Barabasi A L. Impact of non-Poissonian activity patterns on spreading processes. Physical Review Letters, 2007, 98(15): Article No.158702 doi: 10.1103/PhysRevLett.98.158702 [20] 20 Barabasi A L. The origin of bursts and heavy tails in human dynamics. Nature, 2005, 435(7039): 207−211 doi: 10.1038/nature03459 [21] 21 Blanchard P, Hongler M O. Modeling human activity in the spirit of Barabasi’s queueing systems. Physical Review E, 2007, 75(2): Article No.26102 doi: 10.1103/PhysRevE.75.026102 [22] 22 Bedogne C, Rodgers G J. A continuous model of human dynamics. Physica A: Statistical Mechanics and its Applications, 2007, 385(1): 356−362 doi: 10.1016/j.physa.2007.06.025 [23] Leskovec J, Horvitz E. Planetary-scale views on a large instant-messaging network. In: Proceeding of the 17th International Conference on World Wide Web. New York: ACM, 2008. 915−924 [24] 24 Hoteit S, Secci S, Sobolevsky S, Ratti C, Pujolle G. Estimating human trajectories and hotspots through mobile phone data. Computer Networks, 2014, 64: 296−307 doi: 10.1016/j.comnet.2014.02.011 [25] 25 Zhao Z D, Zhou T. Empirical analysis of online human dynamics. Physica A: Statistical Mechanics and its Applications, 2012, 391(11): 3308−3315 doi: 10.1016/j.physa.2012.01.008 [26] 26 Zhou T, Kiet H A T, Kim B J, Wang B H, Holme P. Role of activity in human dynamics. EPL (Europhysics Letters), 2008, 82(2): Article No.28002 doi: 10.1209/0295-5075/82/28002 [27] 27 Duarte Torres S, Weber I, Hiemstra D. Analysis of search and browsing behavior of young users on the web. ACM Transactions on the Web, 2014, 8(2): Article No.7 [28] 28 Hu H B, Han D Y. Empirical analysis of individual popularity and activity on an online music service system. Physica A: Statistical Mechanics and its Applications, 2008, 387(23): 5916−5921 doi: 10.1016/j.physa.2008.06.018 [29] 29 Jiang Z Q, Zhou W X, Tan Q Z. Online-offline activities and game-playing behaviors of avatars in a massive multiplayer online role-playing game. EPL (Europhysics Letters), 2009, 88(4): Article No.48007 doi: 10.1209/0295-5075/88/48007 [30] 30 Yan X Y, Zhou T. Destination choice game: a spatial interaction theory on human mobility. Scientific Reports, 2019, 9: Article No.9466 doi: 10.1038/s41598-019-46026-w [31] Zhou T, Han X P, Wang B H. Towards the understanding of human dynamics. Science Matters: Humanities as Complex Systems Singapore: World Scientific Publishing, 2015 [32] 32 Wang P, Zhou T, Han X P, Wang B H. Modeling correlated human dynamics with temporal preference. Physica A: Statistical Mechanics and its Applications, 2014, 398: 145−151 doi: 10.1016/j.physa.2013.12.014 [33] 33 Zhao Z D, Cai S M, Huang J M, Fu Y, Zhou T. Scaling behavior of online human activity. EPL (Europhysics Letters), 2012, 100(4): Article No.48004 doi: 10.1209/0295-5075/100/48004 [34] 周涛, 韩筱璞, 闫小勇, 杨紫陌, 赵志丹, 汪秉宏. 人类行为时空特性的统计力学. 电子科技大学学报, 2013, 42(4): 481−540 doi: 10.3969/j.issn.1001-0548.2013.04.00134 Zhou Tao, Han Xiao-Pu, Yan Xiao-Yong, Yang Zi-Mo, Zhao Zhi-Dan, Wang Bing-Hong. Statistical mechanics on temporal and spatial activities of human. Journal of University of Electronic Science and Technology of China, 2013, 42(4): 481−540 doi: 10.3969/j.issn.1001-0548.2013.04.001 [35] 张海涛, 周涛, 李春光. 基于个体智能的群集动力学演化分析与控制研究. 中国科技成果, 2016, (15): 77 doi: 10.3772/j.issn.1009-5659.2016.15.03935 Zhang Hai-Tao, Zhou Tao, Li Chun-Guang. Analysis and control of cluster dynamics based on individual intelligence. China Science and Technology Achievements, 2016, (15): 77 doi: 10.3772/j.issn.1009-5659.2016.15.039 [36] 韩筱璞, 汪秉宏, 周涛. 人类行为动力学研究. 复杂系统与复杂性科学, 2010, 7(2-3): 132−14436 Han Xiao-Pu, Wang Bing-Hong, Zhou Tao. Researches of human dynamics. Complex Systems and Complexity Science, 2010, 7(2-3): 132−144 [37] 周涛, 韩筱璞, 闫小勇, 杨紫陌, 赵志丹, 汪秉宏. 人类行为时空特性的统计力学. 电子科技大学学报, 2013, 42(4): 481−540 doi: 10.3969/j.issn.1001-0548.2013.04.00137 Zhou Tao, Han Xaio-Pu, Yan Xiao-Yong, Yang Zi-Mo, Zhao Zhi-Dan, Wang Bing-Hong. Statistical mechanics on temporal and spatial activities of human. Journal of University of Electronic Science and Technology of China, 2013, 42(4): 481−540 doi: 10.3969/j.issn.1001-0548.2013.04.001 [38] 周涛, 汪秉宏, 韩筱璞, 尚明生. 社会网络分析及其在舆情和疫情防控中的应用. 系统工程学报, 2010, 25(6): 742−75438 Zhou Tao, Wang Bing-Hong, Han Xiao-Pu, Shang Ming-Sheng. Social network analysis and its application in the prevention and control of propagation for public opinion and the epidemic. Journal of Systems Engineering, 2010, 25(6): 742−754 [39] 周涛, 傅忠谦, 牛永伟, 王达, 曾燕, 汪秉宏, 等. 复杂网络上传播动力学研究综述. 自然科学进展, 2005, 15(5): 513−518 doi: 10.3321/j.issn:1002-008X.2005.05.00139 Zhou Tao, Fu Zhong-Qian, Niu Yong-Wei, Wang Da, Zeng Yan, Wang Bing-Hong, et al. Overview of communication dynamics in complex networks. Progress in Natural Science, 2005, 15(5): 513−518 doi: 10.3321/j.issn:1002-008X.2005.05.001 [40] 40 Zald M N, Ash R. Social movement organizations: growth, decay and change. Social Forces, 1966, 44(3): 327−341 doi: 10.2307/2575833 [41] 赵鼎新. 社会与政治运动讲义. 北京: 社会科学文献出版社, 2006: 273Zhao D X. Social and Political Movements. Beijing: Social Sciences Academic Press, 2006: 273 [42] Klandermans B, Roggeband C. Handbook of Social Movements Across Disciplines. Boston: Springer, 2007. [43] Smelser N J. Theory of Collective Behavior. New York, Free Press, 1962. [44] Tilly C. Does modernization breed revolution? Comparative Politics, 1973, 5(3): 425−447 [45] Olson M. The Logic of Collective Action. Cambridge, Mass: Cambridge University Press, 1965. [46] McCarthy J D, Zald M. The Trend of Social Movements in America: Professionalization and Resource Mobilization. Morristown: General Learning Corporation, 1973. [47] 47 Eisinger P K. The conditions of protest behavior in American cities. The American Political Science Review, 1973, 67(1): 11−28 doi: 10.2307/1958525 [48] McAdam D. Political Process and the Development of Black Insurgency (Second edition). Chicago: University of Chicago Press, 1982. [49] Goffman E. Frame Analysis. New York: Harper and Row Publisher, 1974. [50] Meyer D S, Tarrow S. The Social Movement Society: Contentious Politics for a New Century. Lanham, MD: Rowman and Littlefield, 1998. [51] Sharifian F. Cultural Conceptualisations and Language: Theoretical Framework and Applications. Amsterdam: John Benjamins Publishing Company, 2011. [52] 52 Passy F, Giugni M. Life-spheres, networks, and sustained participation in social movements: a phenomenological approach to political commitment. Sociological Forum, 2000, 15(1): 117−144 doi: 10.1023/A:1007550321469 [53] Bissio R. Occupying new places for public life: politics and people in a network society. Whose World Is It Anyway? Civil Society, the United Nations, and the Multilateral Future. Ottawa: United Nations Association of Canada, 1999. 429−459 [54] Gamson W A, Meyer D S. Framing political opportunity. Comparative Perspectives on Social Movements: Political Opportunities, Mobilizing Structures, and Cultural Framing. Cambridge: Cambridge University Press, 1996. [55] Mele C. Cyberspace and disadvantaged community: the internet as a tool for collective action. Communities in Cyberspace. London: Routledge, 2009. 290−310 [56] 56 Clak J D, Themudo N S. Linking the web and the street: Internet-based “Dotcauses” and the “Anti-Globalization” movement. World Development, 2006, 34(1): 50−74 doi: 10.1016/j.worlddev.2005.09.001 [57] 57 Earl J, Kimport K. Movement societies and digital protest: fan activism and other nonpolitical protest online. Sociological Theory, 2009, 27(3): 220−243 doi: 10.1111/j.1467-9558.2009.01346.x [58] 58 Garrett R K. Protest in an information society: a review of literature on social movements and new ICTs. Information Communication & Society, 2006, 9(2): 202−224 [59] 马汀•奇达夫, 蔡文彬 [著], 王凤彬, 朱超威 [译]. 社会网络与组织. 北京: 中国人民大学出版社, 2007.Kilduff M, Tsai W [Author], Wang Feng-Bin, Zhu Chao-Wei [Translator]. Social Networks and Organizations. Beijing: China People’s University Press, 2007 [60] 乐国安, 薛婷. 网络集群行为的理论解释模型探索. 南开学报(哲学社会科学版), 2011, (5): 116−12360 Yue Guo-An, Xue Ting. The theoretical interpretation model on the internet collective behaviors. Nankai Journal, 2011, (5): 116−123 [61] 61 Chmiel A, Sienkiewicz J, Thelwall M, Paltoglou G, Buckley K, Kappas A, et al. Collective emotions online and their influence on community life. PLoS One, 2011, 6(7): Article No.e22207 doi: 10.1371/journal.pone.0022207 [62] 夏艳. 网民群体行为及心理研究 [硕士学位论文], 南昌大学, 中国, 2011Xia Yan. Netizen Group Behavior and Psychological Research [Master thesis], Nanchang University, China, 2011 [63] 63 Epstein J M, Axtell R. Artificial societies and generative social science. Artificial Life and Robotics, 1997, 1(1): 33−34 doi: 10.1007/BF02471109 [64] Epstein J M, Axtell R. Growing Artificial Societies: Social Science from the Bottom up. Cambridge, USA: MIT Press, 1996. [65] 65 Jiang Y C, Jiang J C. Understanding social networks from a multiagent perspective. IEEE Transactions on Parallel and Distributed Systems, 2014, 25(10): 2743−2759 doi: 10.1109/TPDS.2013.254 [66] 66 Lane N D, Xu Y, Lu H, Eisenman S B, Choudhury T, Campbell A T. Cooperative Communities (CoCo): exploiting social networks for large-scale modeling of human behavior. IEEE Pervasive Computing, 2011, 10(4): 45−53 doi: 10.1109/MPRV.2011.70 [67] Nemiche M, Cavero V, Lopez R P. Understanding social behavior evolutions through agent-based modeling. In: Proceedings of 2012 International Conference on Multimedia Computing and Systems, Tangier, Morocco, 2012. pp. 980−986 [68] 68 Radinsky K, Svore K M, Dumais S T, Shokouhi M, Teevan T, Bocharov A, et al. Behavioral dynamics on the Web: learning, modeling, and prediction. ACM Transactions on Information Systems, 2013, 31(3): Article No.16 [69] 69 Zhou M, Dong H R, Zhao Y B, Ioannou P A, Wang F Y. Optimization of crowd evacuation with leaders in urban rail transit stations. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(12): 4476−4487 doi: 10.1109/TITS.2018.2886415 [70] 70 Wang F Y. Parallel control and management for intelligent transportation systems: concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 630−638 doi: 10.1109/TITS.2010.2060218 [71] 71 Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS: a unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 577−587 doi: 10.1109/JAS.2017.7510598 [72] 72 Han S S, Wang X, Zhang J J, Cao D P, Wang F Y. Parallel vehicular networks: a CPSS-based approach via multimodal big data in IoV. IEEE Internet of Things Journal, 2019, 6(1): 1079−1089 doi: 10.1109/JIOT.2018.2867039 [73] 王晓, 要婷婷, 韩双双, 曹东璞, 王飞跃. 平行车联网: 基于ACP的智能车辆网联管理与控制. 自动化学报, 2018, 44(8): 1391−140473 Wang Xiao, Yao Ting-Ting, Han Shuang-Shuang, Cao Dong-Pu, Wang Fei-Yue. Parallel internet of vehicles: the ACP-based networked management and control for intelligent vehicles. Acta Automatica Sinica, 2018, 44(8): 1391−1404 [74] 74 Li L, Wang X, Wang K F, Lin Y L, Xin J M, Chen L, et al. Parallel testing of vehicle intelligence via virtual-real interaction. Science Robotics, 2019, 4(28): Article No.eaaw4106 doi: 10.1126/scirobotics.aaw4106 [75] 杨林瑶, 韩双双, 王晓, 李玉珂, 王飞跃. 网络系统实验平台: 发展现状及展望. 自动化学报, 2019, 45(9): 1637−165475 Yang Lin-Yao, Han Shuang-Shuang, Wang Xiao, Li Yu-Ke, Wang Fei-Yue. Computational experiment platforms for networks: the state of the art and prospect. Acta Automatica Sinica, 2019, 45(9): 1637−1654 [76] 王飞跃, 张军, 张俊, 王晓. 工业智联网: 基本概念、关键技术与核心应用. 自动化学报, 2018, 44(9): 1606−161776 Wang Fei-Yue, Zhang Jun, Zhang Jun, Wang Xiao. Industrial internet of minds: concept, technology and application. Acta Automatica Sinica, 2018, 44(9): 1606−1617 [77] 林懿伦, 戴星原, 李力, 王晓, 王飞跃. 人工智能研究的新前线: 生成式对抗网络. 自动化学报, 2018, 44(5): 775−79277 Lin Yi-Lun, Dai Xing-Yuan, Li Li, Wang Xiao, Wang Fei-Yue. The New frontier of AI research: generative adversarial networks. Acta Automatica Sinica, 2018, 44(5): 775−792 [78] 刘烁, 王帅, 孟庆振, 叶佩军, 王涛, 黄文林, 王飞跃. 基于ACP行为动力学的犯罪主体行为平行建模分析. 自动化学报, 2018, 44(2): 251−26178 Liu Shuo, Wang Shuai, Meng Qing-Zhen, Ye Pei-Jun, Wang Tao, Huang Wen-Lin, Wang Fei-Yue. Parallel modeling of criminal subjects behavior based on ACP behavioral dynamics. Acta Automatica Sinica, 2018, 44(2): 251−261 [79] 王飞跃, 李晓晨, 毛文吉, 王涛. 社会计算的基本方法与应用. 杭州: 浙江大学出版社, 2013.Wang Fei-Yue, Li Xiao-Chen, Mao Wen-Ji, Wang Tao. Social Computing: Methods and Applications. Hangzhou: Zhejiang University Press, 2013. [80] 80 Wang X, Zheng X H, Zhang X Z, Zeng K, Wang F Y. Analysis of cyber interactive behaviors using artificial community and computational experiments. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(6): 995−1006 doi: 10.1109/TSMC.2016.2615130 [81] Minsky M. The Society of Mind. New York: Simon & Schuster, 1986. [82] Wooldridge M J, Jennings N R. Towards a theory of cooperative problem solving. In: Proceeding of the 6th European Workshop on Modelling Autonomous Agents in a Multi-Agent World. Odense, Denmark, 1994. 15−26 [83] Russell S J, Norving P. Artificial Intelligence: A Modern Approach. Englewood Cliffs, New Jersey: Prentice Hall, 1995. [84] 刘大有, 杨鲲, 陈建中. Agent研究现状与发展趋势. 软件学报, 2000, 11(3): 315−32184 Liu Da-You, Yang Kun, Chen Jian-Zhong. Agents: present status and trends. Journal of Software, 2000, 11(3): 315−321 [85] Swanke T A. Book review: growing artificial societies: social science from the bottom up. Review of Radical Political Economics, 1999, 31(2): 113−116 -

 下载:
下载:










































计量
- 文章访问数: 8462
- HTML全文浏览量: 2701
- PDF下载量: 438
- 被引次数: 0
