

Detection of False Data Injection Attack in Smart Grid via Adaptive Kalman Filtering
-
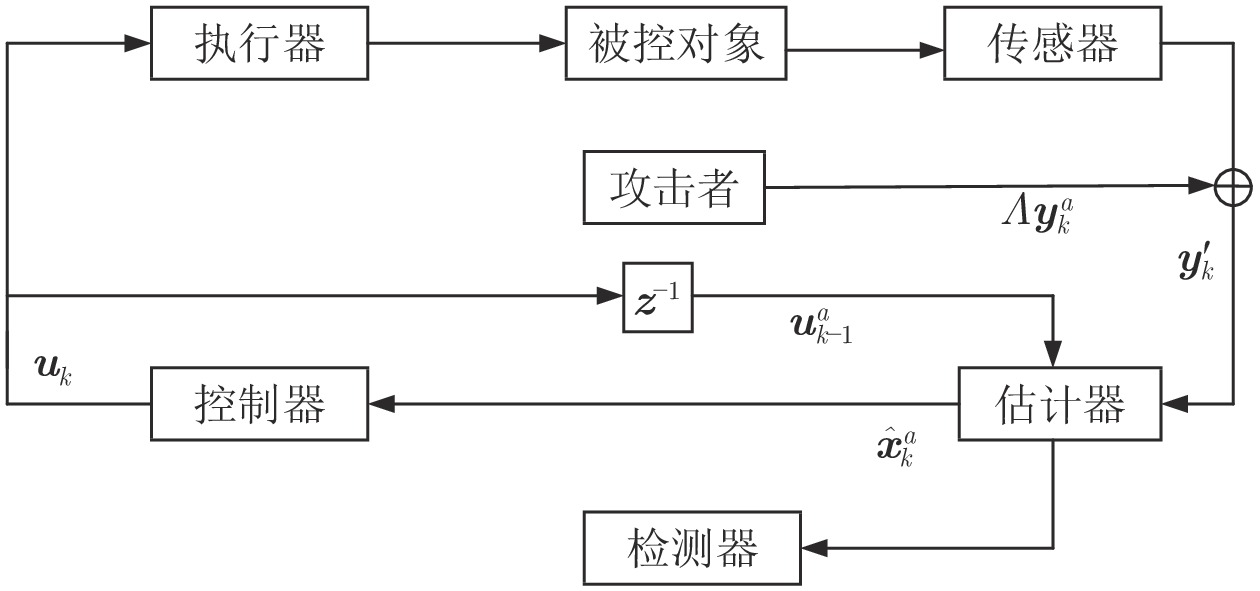
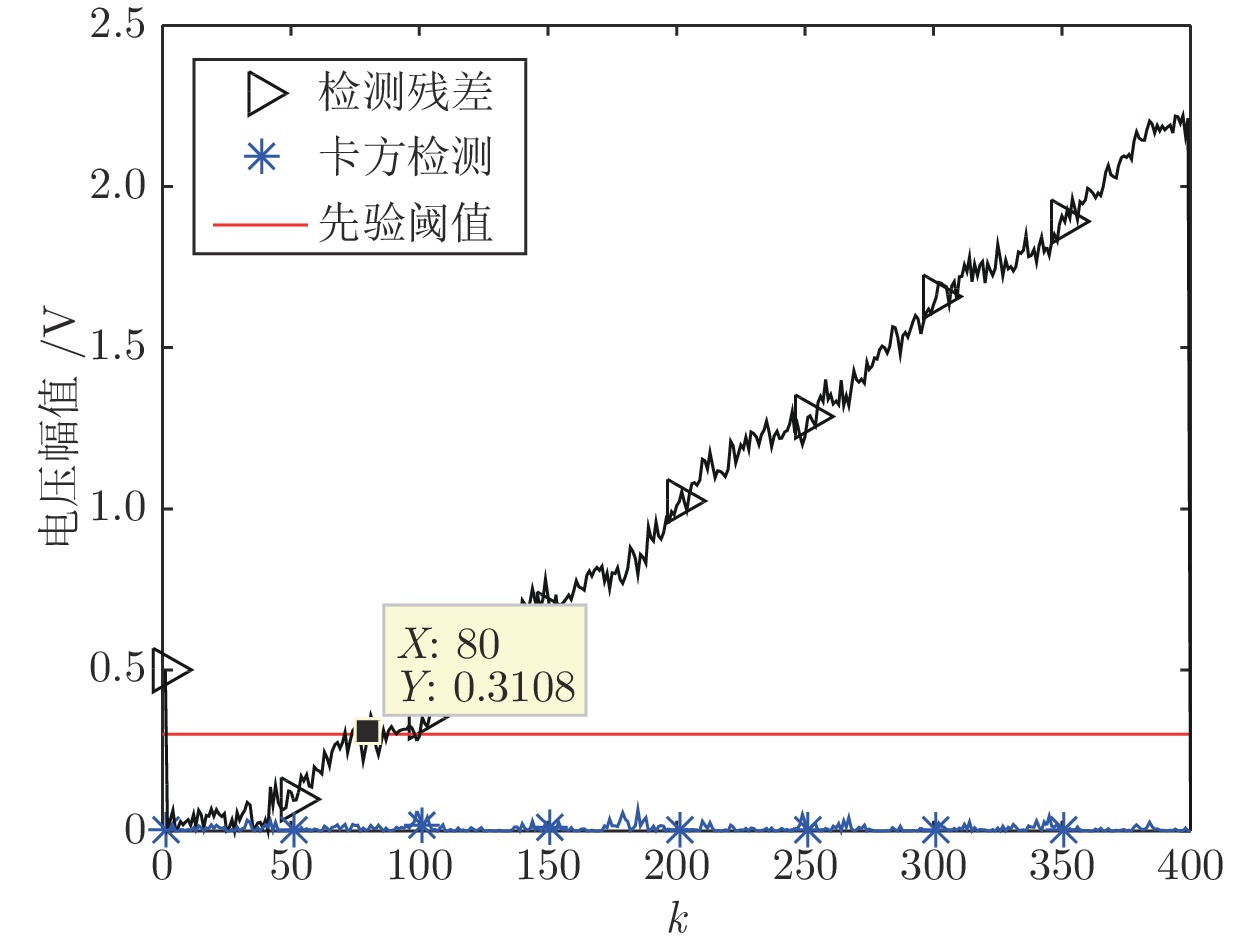
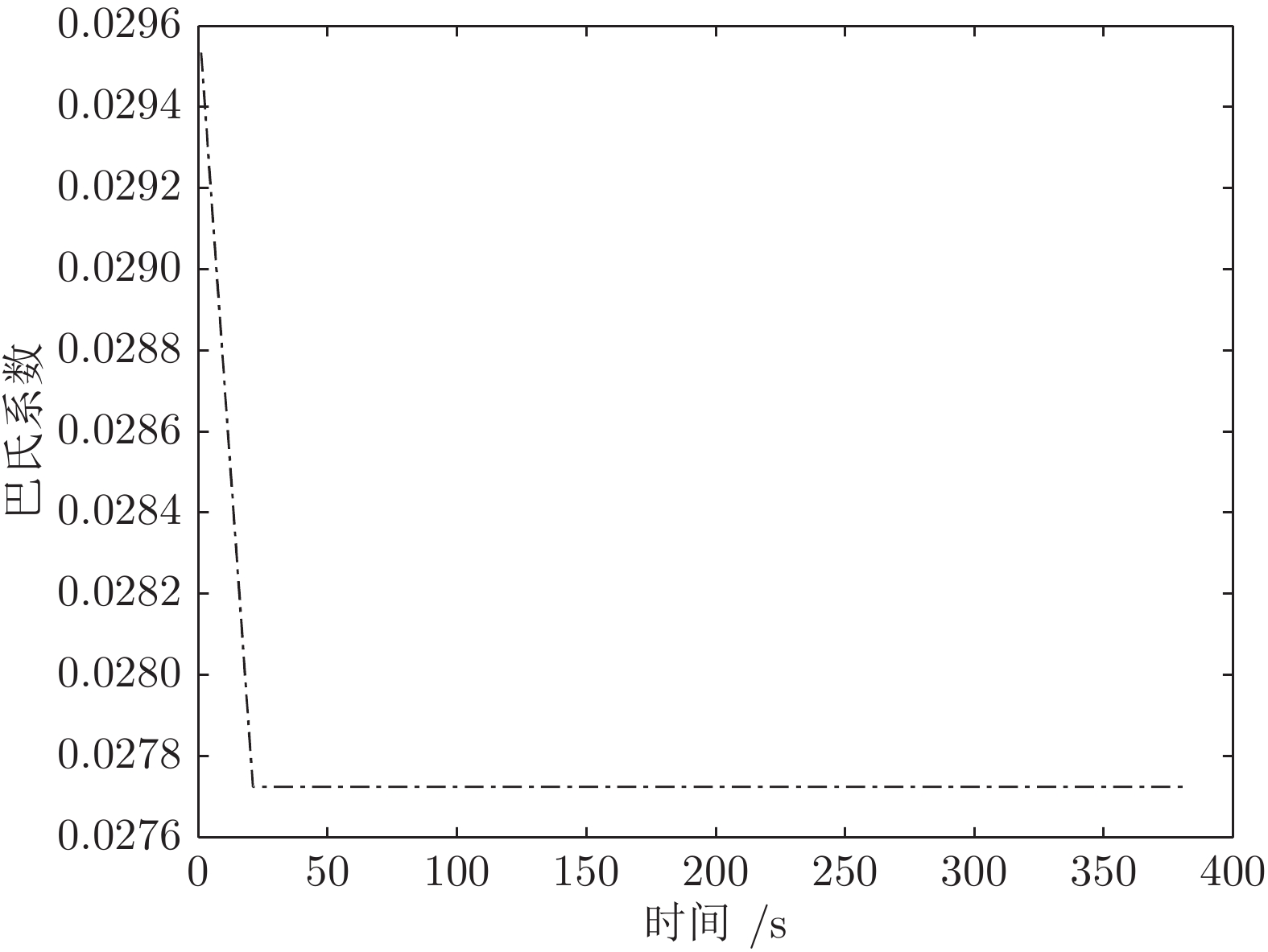
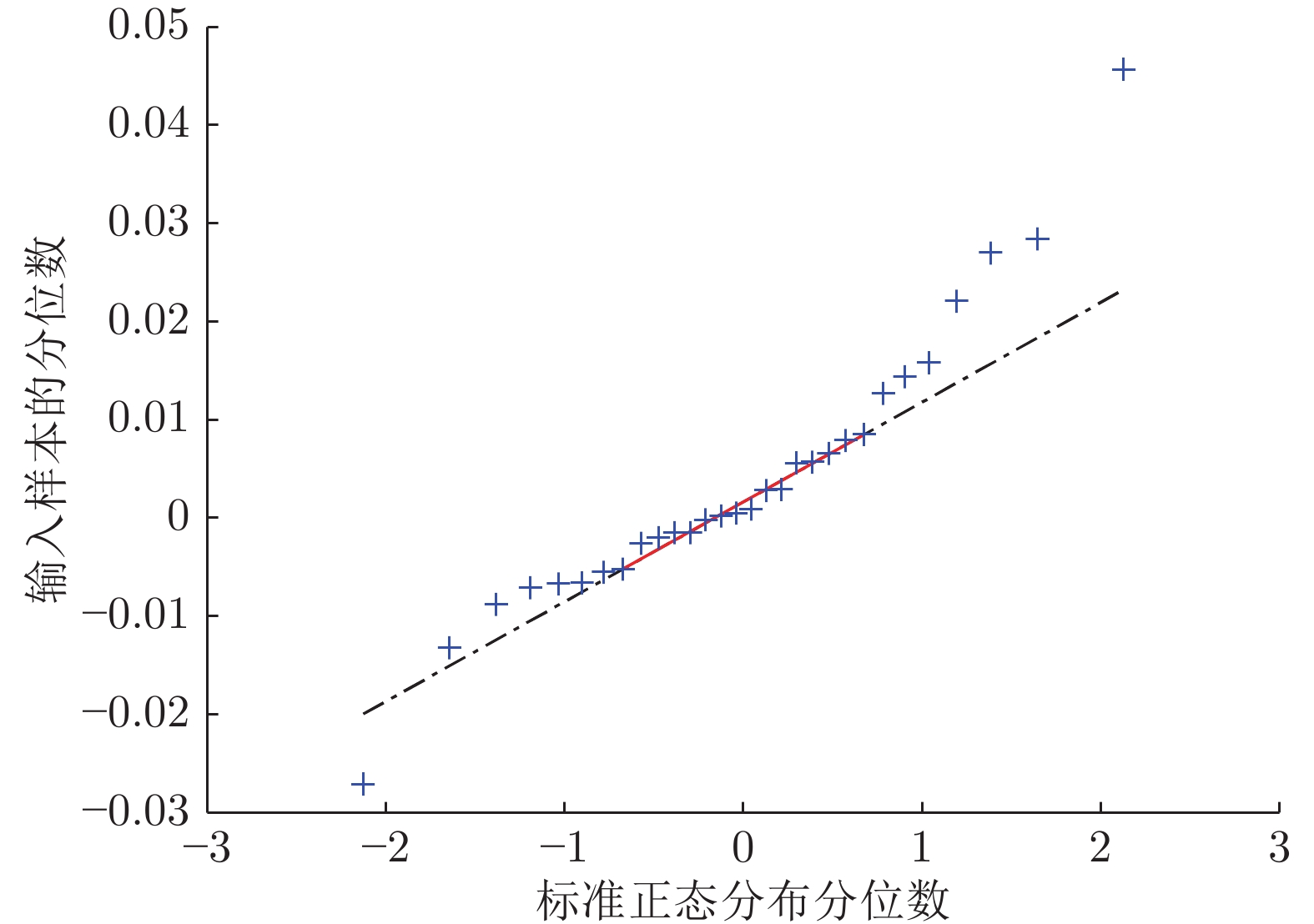
摘要: 研究了一种针对智能电网中假数据注入攻击的有效检测方法. 假数据注入攻击可以保持攻击前后残差基本不变, 绕过传统的不良数据检测技术. 首先基于电网模型, 分析了假数据注入攻击的攻击特性, 针对噪声统计特性未知且无迹Kalman滤波 (Unscented Kalman filter, UKF) 不稳定的现象, 提出了自适应平方根无迹Kalman滤波改进算法. 基于状态估计值, 结合中心极限定理提出检测算法, 并与欧几里得检测方法、巴氏系数检测方法进行比较. 最后, 仿真表明本文所提检测算法的优越性.
-
关键词:
- 智能电网 /
- 虚假数据注入攻击 /
- 攻击检测 /
- 自适应平方根无迹卡尔曼滤波
Abstract: In this paper, an effective detection method for false data injection attack in smart grid is studied. False data injection attack can keep the residual unchanged before and after the attack and bypass the traditional bad data detection technology. Firstly, based on the grid model, the attack characteristics of false data injection attack are analyzed. Aiming at the phenomenon that the noise statistical characteristics are unknown and the unscented Kalman filter (UKF) is unstable, an effective detection method for false data injection attack is proposed. An improved algorithm of adaptive square root unscented Kalman filter is proposed. Based on the state estimation and the central limit theorem, the algorithm is compared with Euclidean method and bayonet coefficient method. Finally, the simulation shows the superiority of the algorithm. -
[1] 彭大天, 董建敏, 蔡忠闽, 张长青, 彭勤科. 假数据注入攻击下信息物理融合系统的稳定性研究. 自动化学报, 2019, 45(1): 196-205.PENG Da-Tian, DONG Jian-Min, CAI Zhong-Min, ZHANG Chang-Qing, PENG Qin-Ke. On the Stability of Cyber-physical Systems Under False Data Injection Attacks. ACTA AUTOMATICA SINICA, 2019, 45(1): 196-205. [2] 王琦, 邰伟, 汤奕, 倪明. 面向电力信息物理系统的虚假数据注入攻击研究综述. 自动化学报, 2019, 45(1): 72-83.WANG Qi, TAI Wei, TANG Yi, NI Ming. A Review on False Data Injection Attack Toward Cyber-physical Power System. ACTA AUTOMATICA SINICA, 2019, 45(1): 72-83. [3] 童晓阳, 王晓茹. 乌克兰停电事件引起的网络攻击与电网信息安全防范思考. 电力系统自动化, 2016, 40(7): 144-148.Tong Xiao-Yang, Wang Xiao-Ru. Inferrence and Countermeasure Presuppostion of Network Attack in Incdient on Ukrainian Power Grid. Automation of Electric Power Systems, 2016, 40(7): 144-148. [4] Liu Y, Ning P, Reiter M K. False Data Injection Attacks against State Estimation in Electric Power Grids. ACM Transactions on Information and System Security, 2011, 14(1): 1-34. [5] Yang C, Yang W, Shi H. DoS attack in centralised sensor network against state estimation. IET Control Theory & Applications, 2018, 12(9): 1244–1253. [6] Kurt M N, Yılmaz Y, Wang X D. Secure Distributed Dynamic State Estimation in Wide-Area Smart Grids. IEEE Transactions on Information Forensics and Security, 2020, 15: 800-815. doi: 10.1109/TIFS.2019.2928207 [7] Weimer J, Kar S, Johansson K H. Distributed detection and isolation of topology attacks in power networks. In: Proceedings of the 1st ACM International Conference on High Confidence Networked Systems, Beijing, China. 2012. 65−71 [8] Qi J J, Sun K, Wang J H, Liu H. Dynamic State Estimation for Multi-Machine Power System by Unscented Kalman Filter With Enhanced Numerical Stability. IEEE Transactions on smart grid, 2018, 9(2): 1184-1196. doi: 10.1109/TSG.2016.2580584 [9] Mo Y L, Garone E, Casavola A, Sinopoli B. False data injection attacks against state estimation in wireless sensor networks. In: Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, USA: IEEE, 2010. 5967−5972 [10] Mohammadi A, Plataniotis K N. Noncircular. Attacks on Phasor Measurement Units for State Estimation in Smart Grid. IEEE Journal of Selected Topics in Signal Processing, 2018, 12(4): 777-789. doi: 10.1109/JSTSP.2018.2840517 [11] Manandhar K, Cao X J, Hu F. Detection of Faults and Attacks Including False Data Injection Attack in Smart Grid Using Kalman Filter. IEEE Transactions on Control of Network Systems, 2014, 1(4): 370-379. doi: 10.1109/TCNS.2014.2357531 [12] Yang Q, Yang J, Yu W, An D, Zhang N, Zhao W. On false data-injection attacks against power system state estimation: modeling and countermeasures. IEEE Transactions on Parallel and Distributed Systems, 2014, 25(3): 717–729. doi: 10.1109/TPDS.2013.92 [13] 梁天添, 王茂. 一类广义连续-离散系统量测丢失情况下鲁棒滤波算法. 中国惯性技术学报, 2018, 26(2): 81-86.LIANG Tian-Tian, WANG Mao. Robust algorithm for a class of sampled-data descriptor systems with missing measurements. Journal of Chinese Inertial Technology, 2018, 26(2): 81-86. [14] 赵琳, 王小旭, 孙明, 丁继成, 闫超. 基于极大后验估计和指数加权的自适应UKF滤波算法. 自动化学报, 2010, 36(7): 1008-1019.Zhao Lin, WANG Xiao-Xu, SUN Ming, DING Ji-Cheng, YAN Chao. Adaptive UKF Filtering Algorithm Based on Maximum a Posterior Estimation and Exponential Weighting. ACTA AUTOMATICA SINICA, 2010, 36(7): 1008-1019. [15] 石勇, 韩崇昭. 自适应UKF算法在目标跟踪中的应用. 自动化学报, 2011, 37(6): 755-759.SHI Yong, HAN Chong-Zhao. Adaptive UKF Method with Applications to Target Tracking. ACTA AUTOMATICA SINICA, 2011, 37(6): 755-759. [16] Van der Merwe R, Wan E A. The square-root unscented Kalman filter for state and parameter estimation. In: Proceedings of the 2001 International Conference on Acoustics, Speech, and Signal Processing. New York, USA: IEEE, 2001. 3461−3464 [17] Xiong K, Zhang H Y, Chan C W. Performance Evaluation of UKF-based Nonlinear Filtering. Automatica, 2006, 42(2): 261-270. doi: 10.1016/j.automatica.2005.10.004 [18] Yu W, Griffith D, Ge L Q, Bhattarai S, Golmie N. An Integrated Detection System against False Data Injection Attacks in the Smart Grid. Security and Communication Networks, 2015, 8(2): 91-109. doi: 10.1002/sec.957 [19] Hu J, Wang Z D, Gao H J. Recursive Filtering with Random Parameter Matrices, Multiple Fading Measurements and Correlated Noises. Automatica, 2013, 49(11): 3440-3448. doi: 10.1016/j.automatica.2013.08.021 -

 下载:
下载:






图(8)
计量
- 文章访问数: 1833
- HTML全文浏览量: 679
- PDF下载量: 365
- 被引次数: 0
