

A High Efficiency Iterative Learning Predictive Functional Control for Nonlinear Fast Batch Processes
-
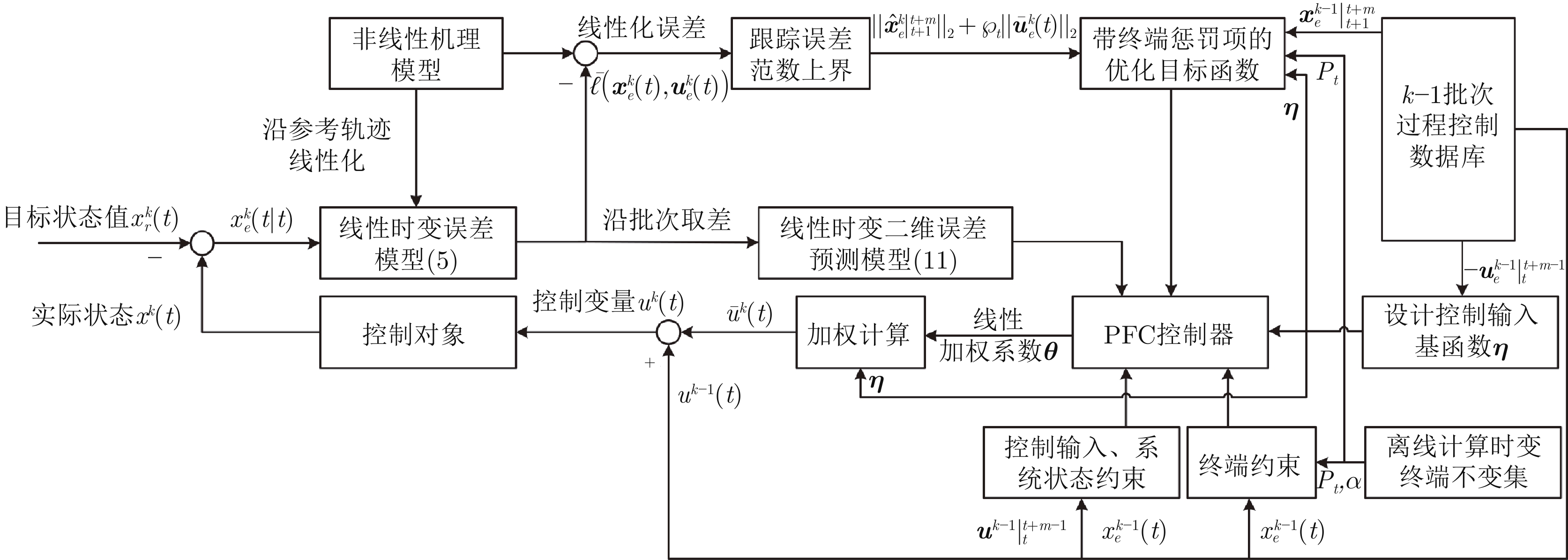
摘要: 迭代学习模型预测控制(Iterative learning model predictive control, ILMPC)具备较强的批次学习能力及突出的时域跟踪性能, 在批次过程控制中发挥了重要作用. 然而对于具有强非线性的快动态批次过程, 传统的迭代学习模型预测控制很难实现计算效率与跟踪精度之间的平衡, 这给其应用带来了挑战. 对此本文提出一种高效迭代学习预测函数控制策略, 将原非线性系统沿参考轨迹线性化得到二维跟踪误差预测模型, 并在控制器设计中补偿所产生的线性化误差, 构造优化目标函数为真实跟踪误差的上界. 为加强优化计算效率, 在时域上结合预测函数控制以降低待优化变量维数, 从而有效降低计算负担. 结合终端约束集理论, 分析了迭代学习预测函数控制的时域稳定性及迭代收敛性. 通过对无人车和典型快速间歇反应器的仿真实验验证所提出算法的有效性.Abstract: Iterative learning model predictive control (ILMPC) is quite popular in controlling the batch process, since it possesses not only the learning ability along batches, but also the strong time domain tracking properties. However, for a fast batch process with strong nonlinear dynamics, the application of the ILMPC is quite challengeable due to the difficulty in balancing the computational efficiency and tracking accuracy. In this paper, an efficient iterative learning predictive functional control is proposed. The original nonlinear system is linearized along reference trajectory to formulate two-dimensional tracking-error based predictive model. The linearization error is compensated to formulate the objective function as the norm bound of the real tracking error. For enhancing control efficiency, predictive functional control is incorporated to reduce the dimension of optimized variable so as to cut down computation burden effectively. The stability and convergence of this iterative learning predictive functional control with terminal constraint are analyzed. The simulations of unmanned ground vehicle and typical fast batch reactor verify the effectiveness of the proposed control algorithm.
-
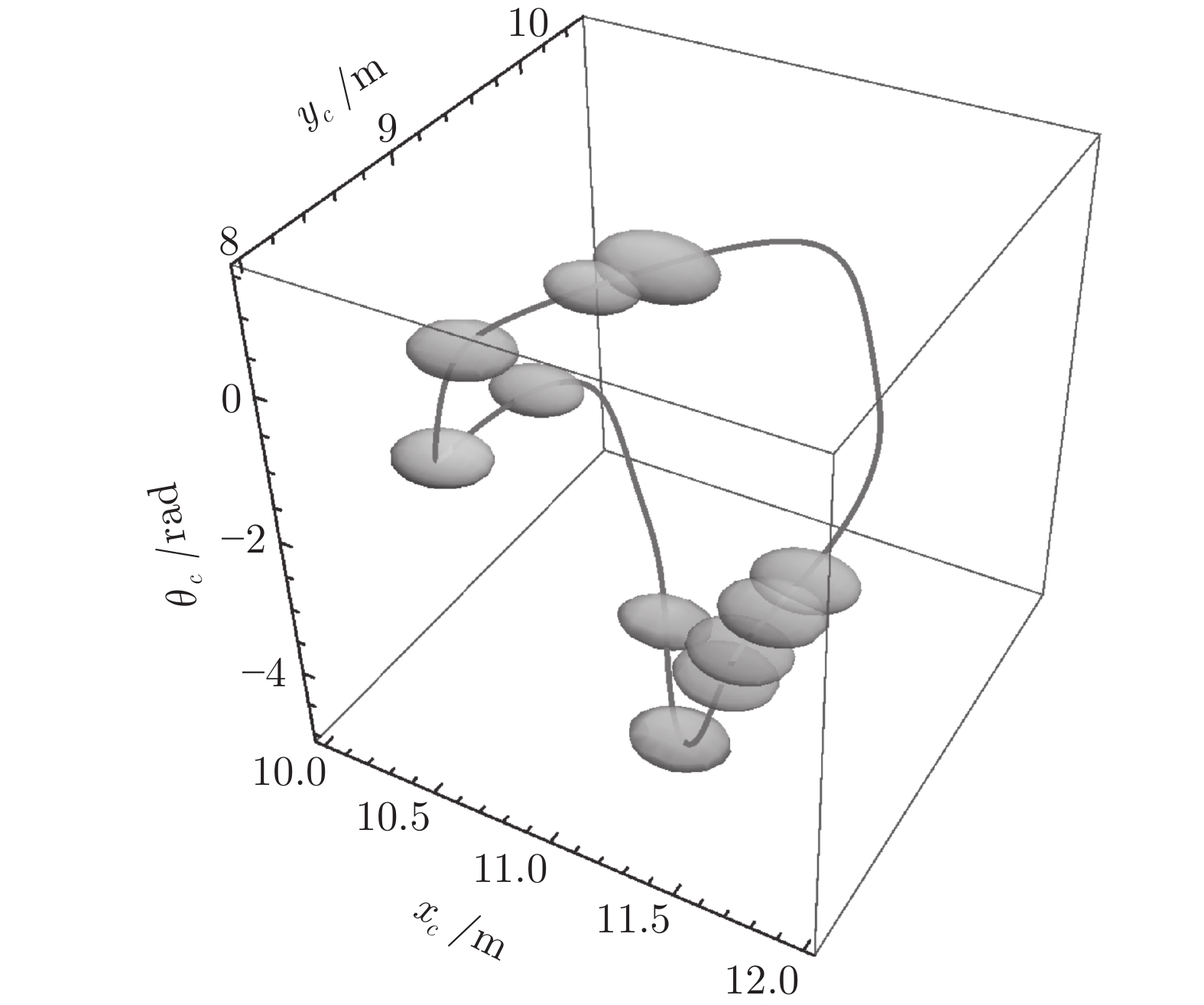
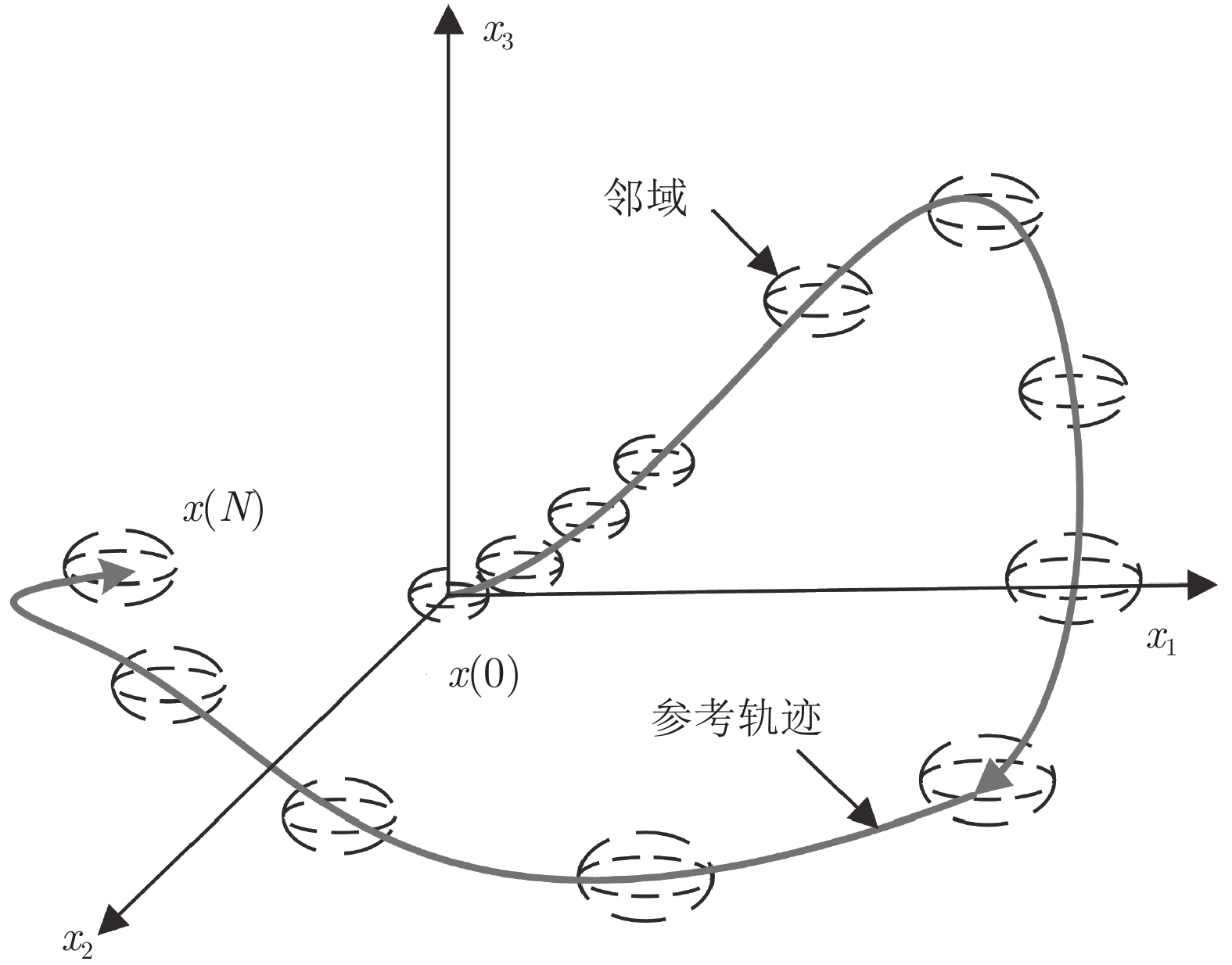
图 4 UGV系统跟踪误差时变终端不变集
Fig. 4 The time-varying tracking error terminal invariant set of UGV control system
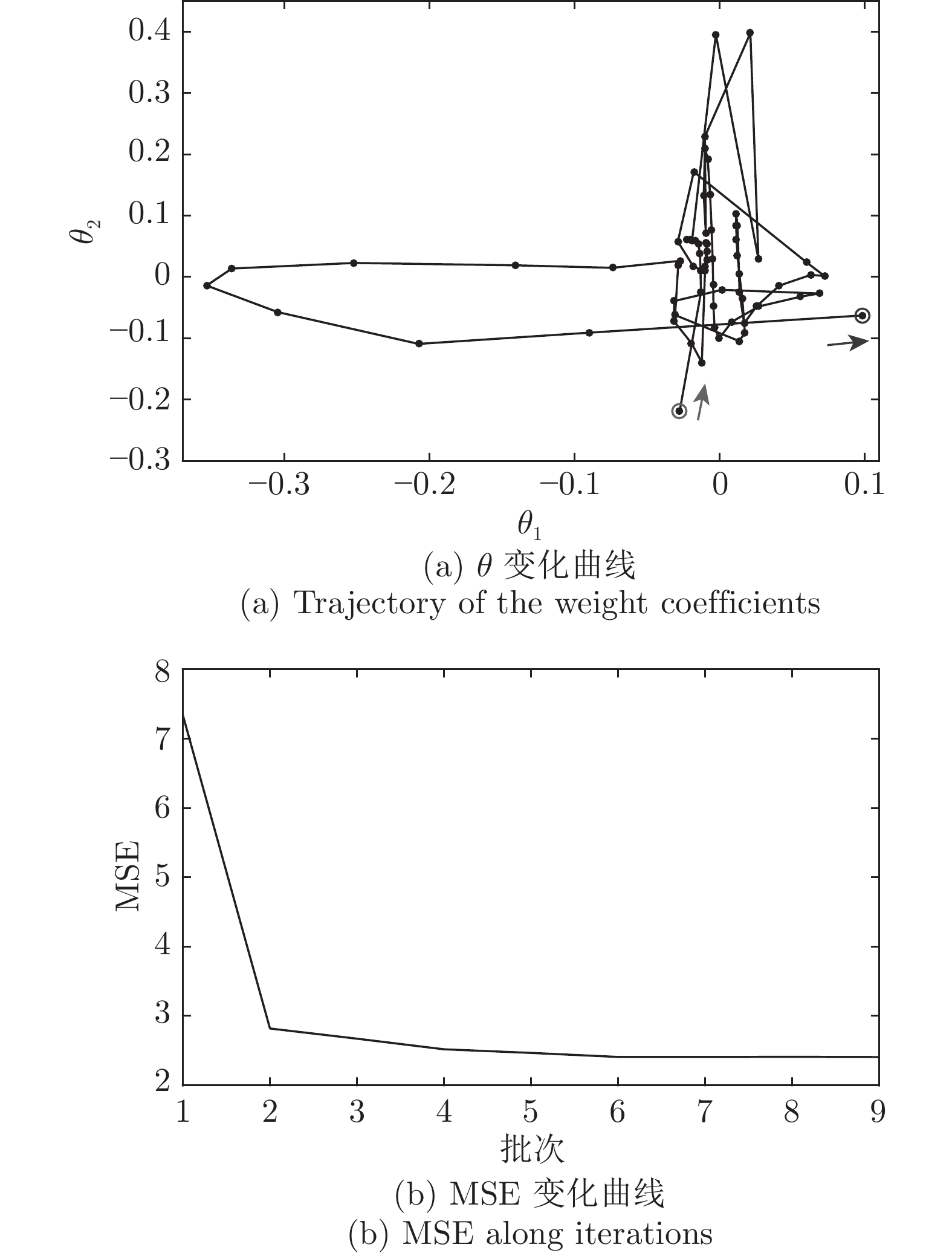
图 7 UGV系统
${\boldsymbol{\theta}}$ 变化曲线和MSE变化曲线Fig. 7 The change curves of
${\boldsymbol{\theta}}$ and MSE of UGV control system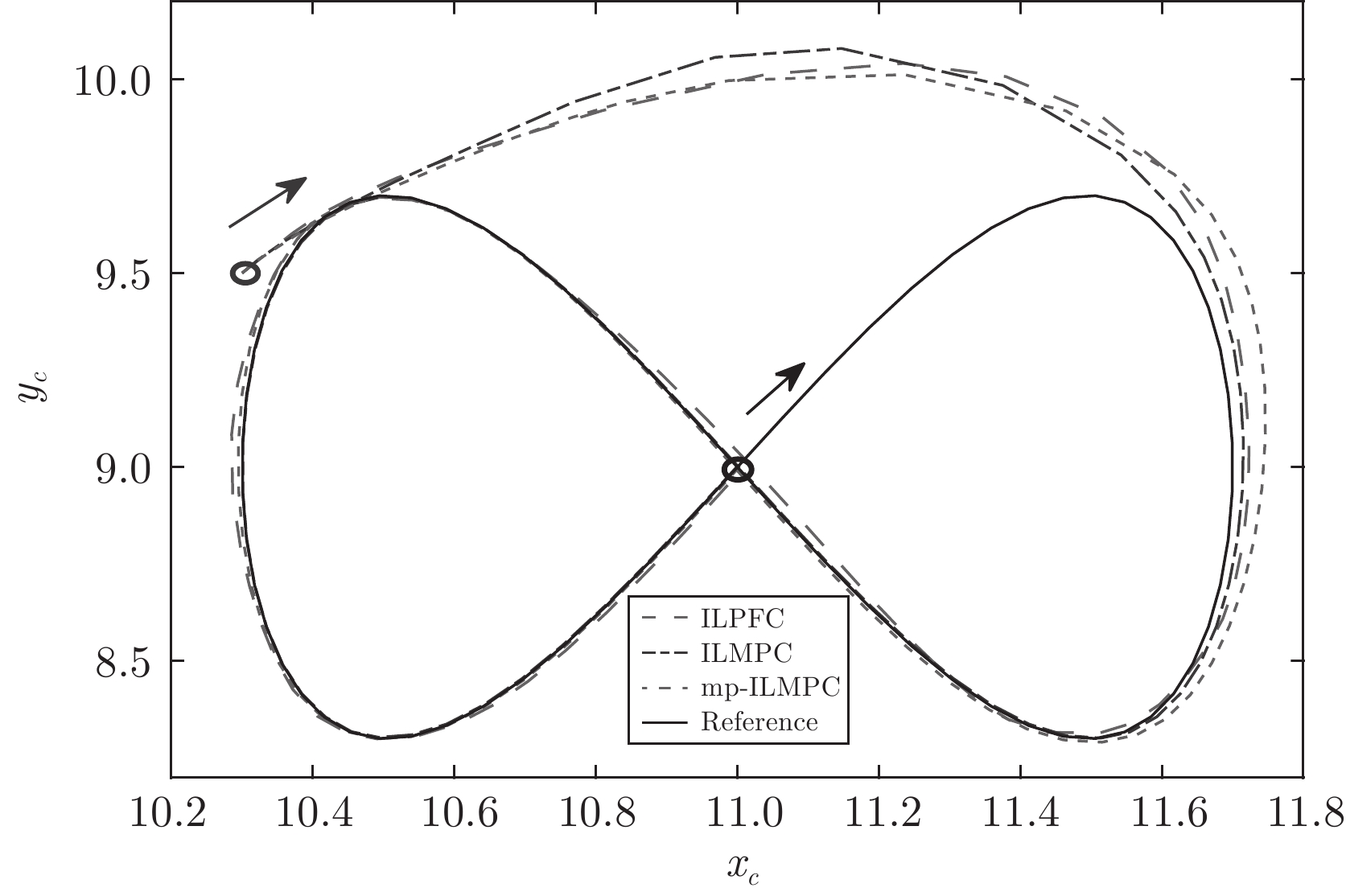
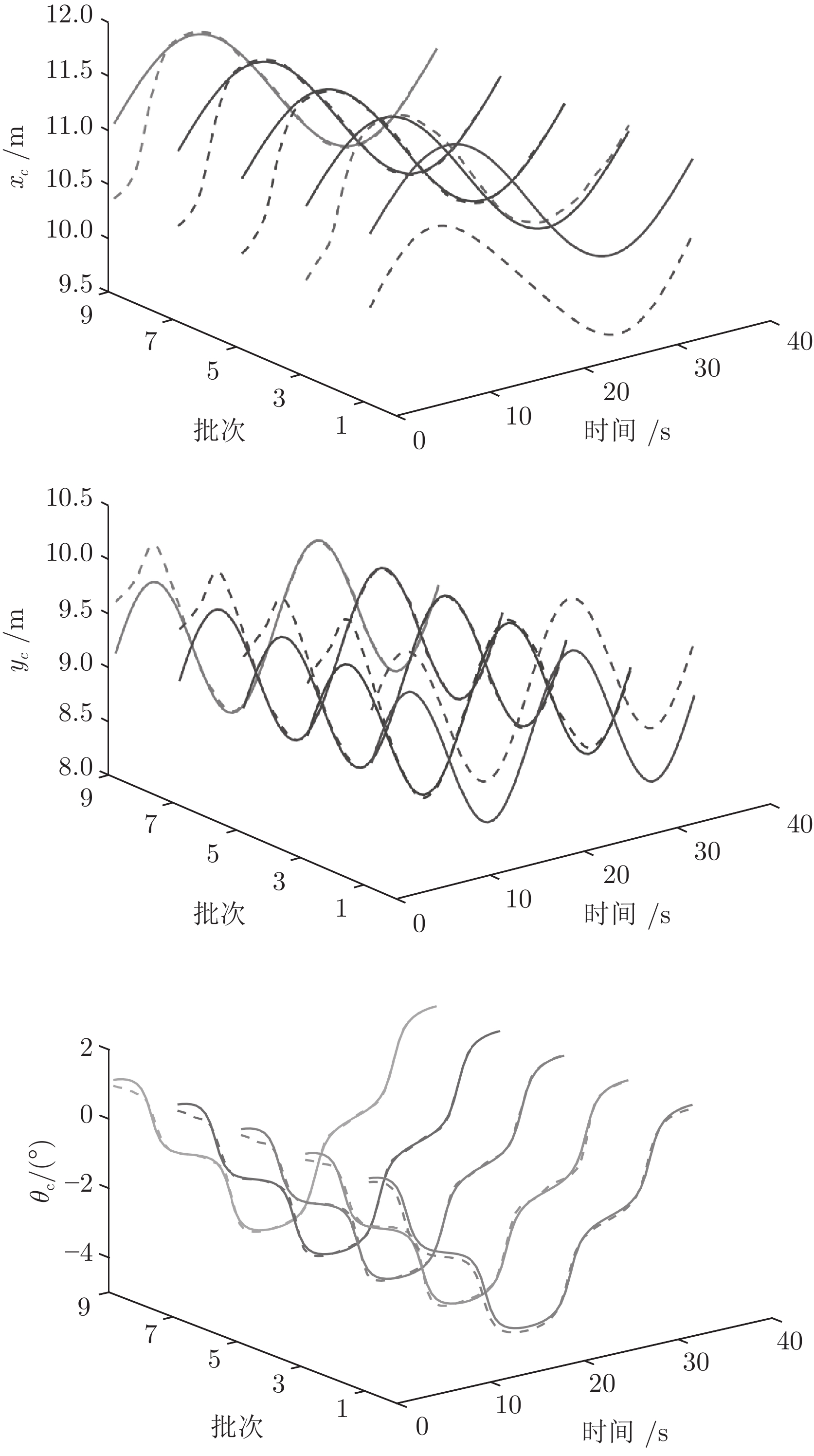
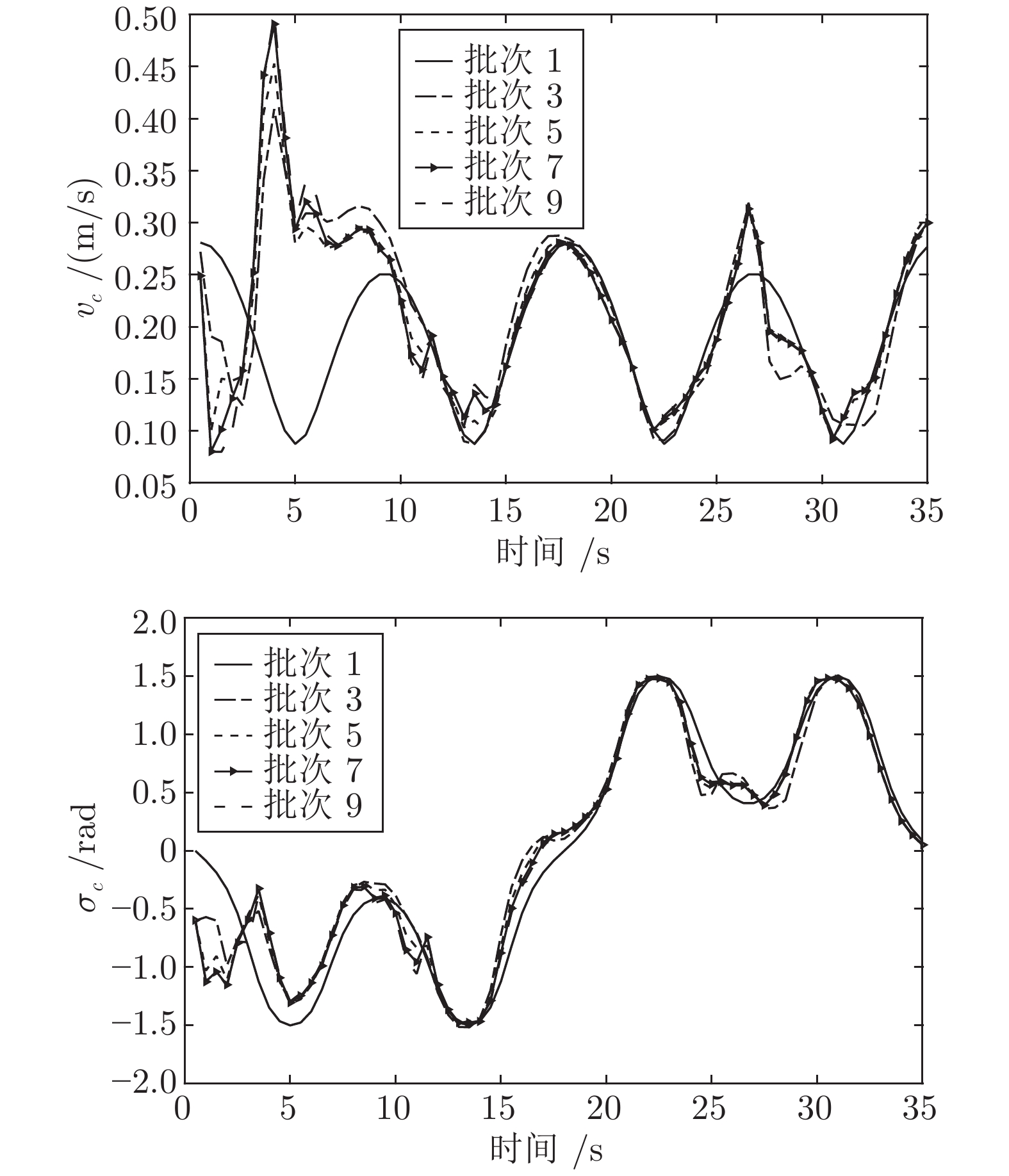
图 8 UGV系统分别在ILPFC、ILMPC和mp-ILMPC控制下第9批次的运动跟踪曲线
Fig. 8 The motion curve of UGV during the 9th batch under the ILPFC, ILMPC and mp-ILMPC
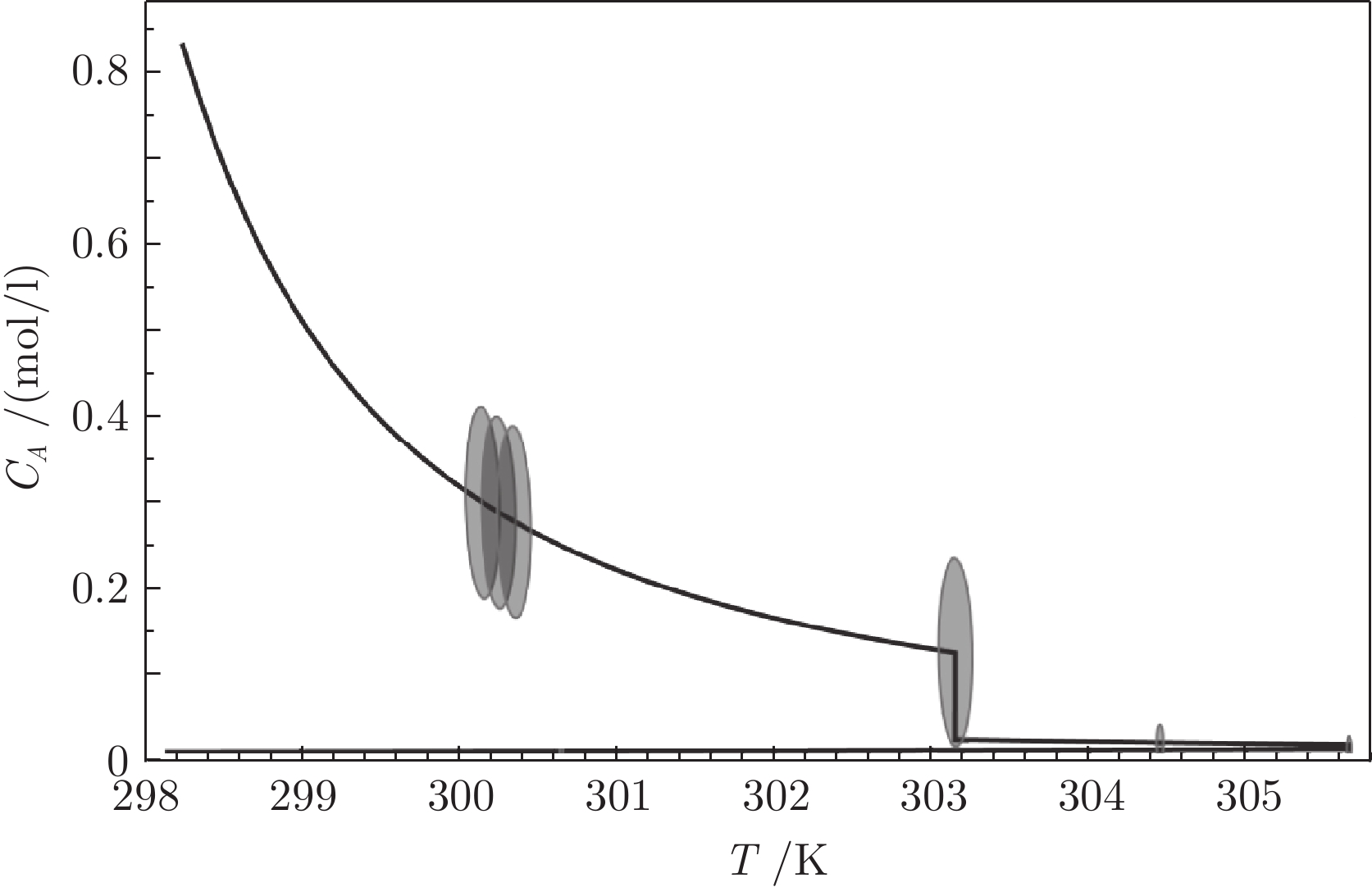
图 9 间歇反应器系统跟踪误差时变终端不变集
Fig. 9 The time-varying tracking error terminal invariant set of batch reactor control system
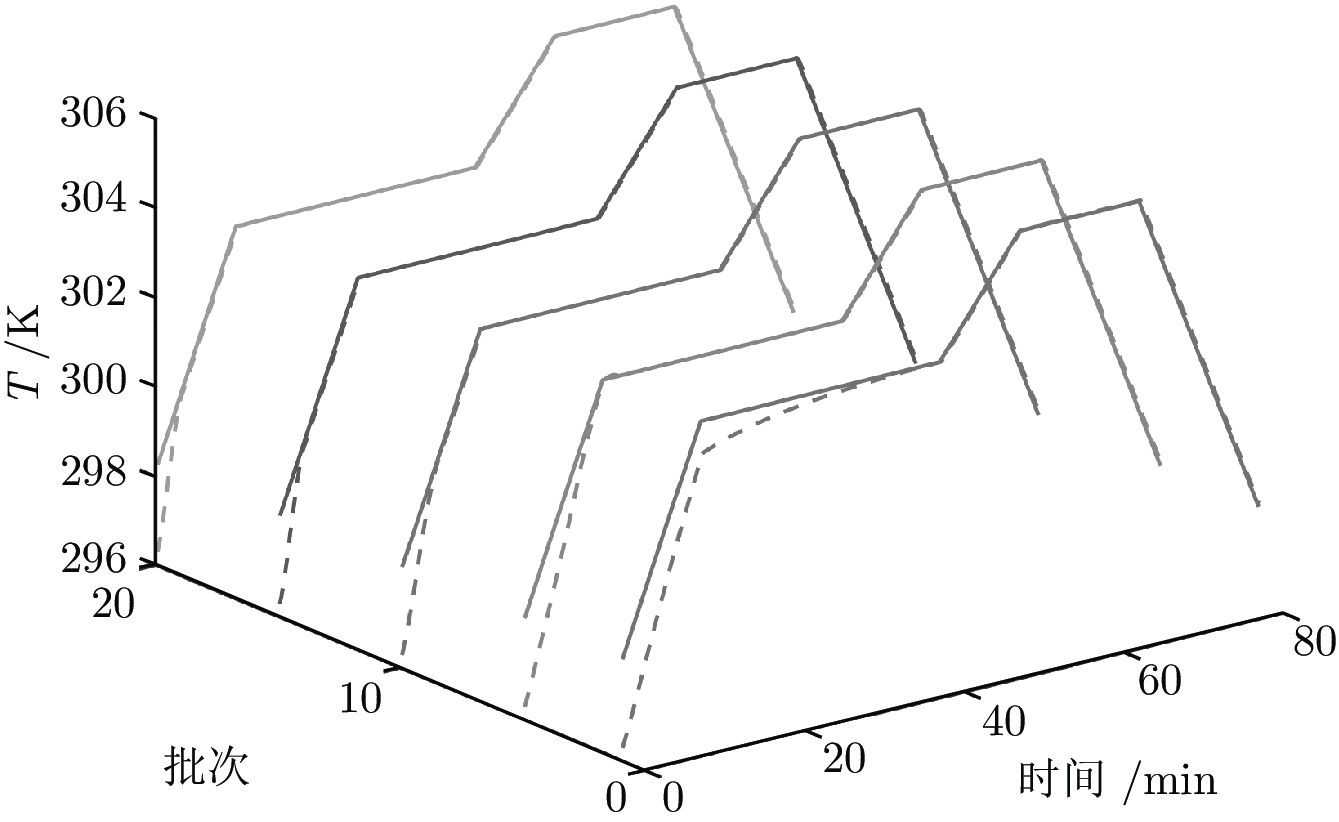
图 10 ILPFC控制下反应温度跟踪曲线
Fig. 10 The trajectories of the reaction temperature
$ T$ under the ILPFC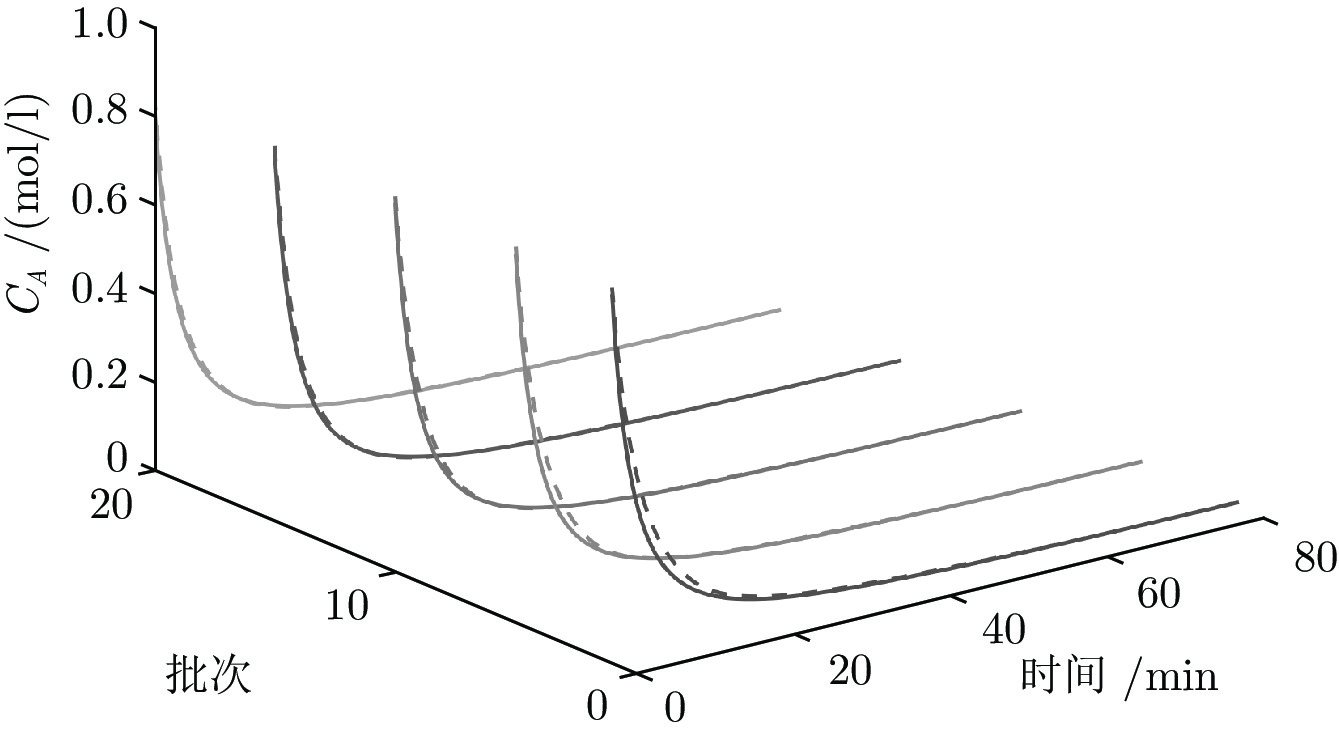
图 11 ILPFC控制下反应物A浓度跟踪曲线
Fig. 11 The trajectories of the concentration
$ {C_A}$ under the ILPFC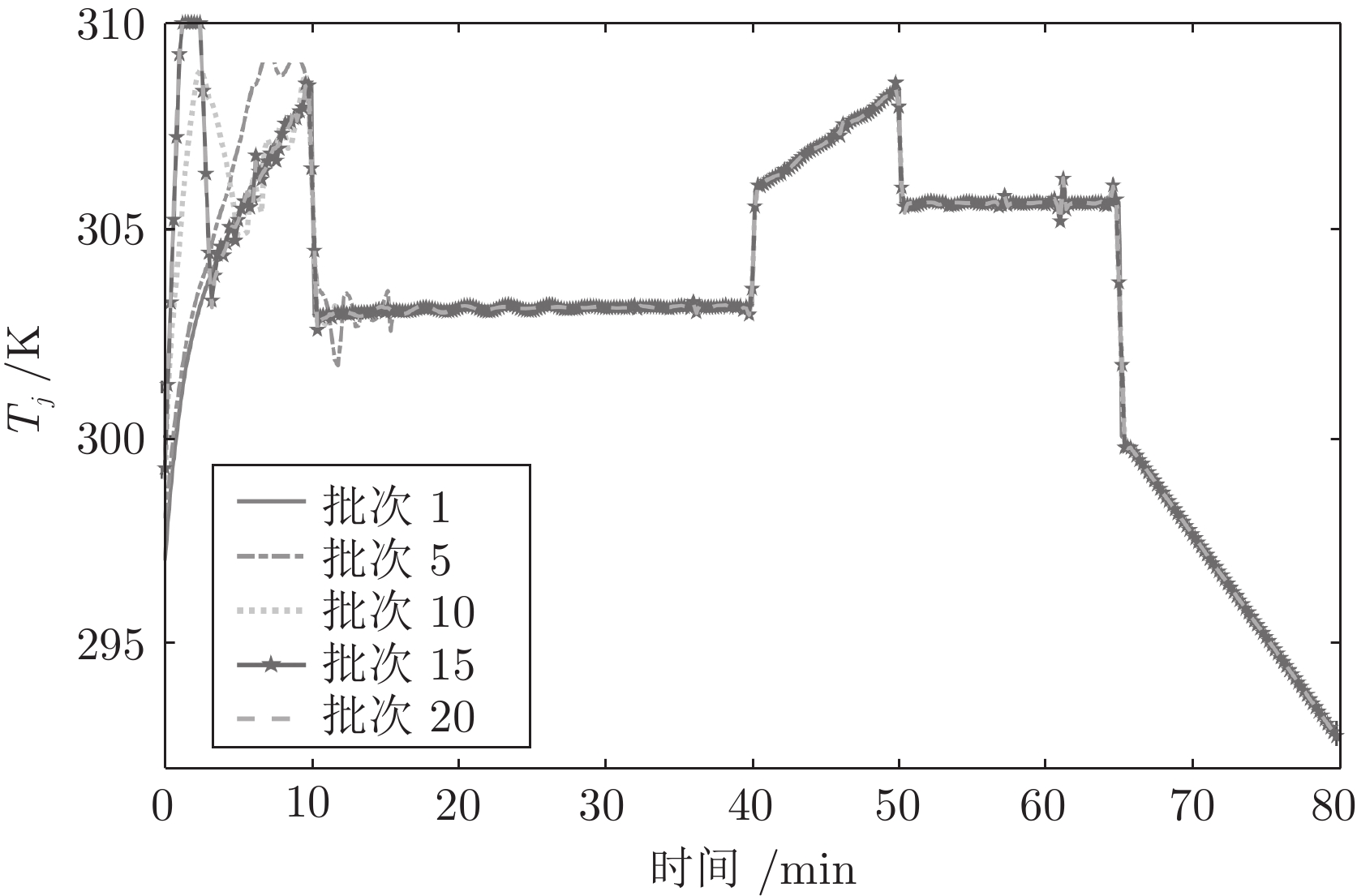
图 12 ILPFC控制下冷却剂温度曲线
Fig. 12 The trajectories of the coolant stream temperature
$ {T_j}$ under the ILPFC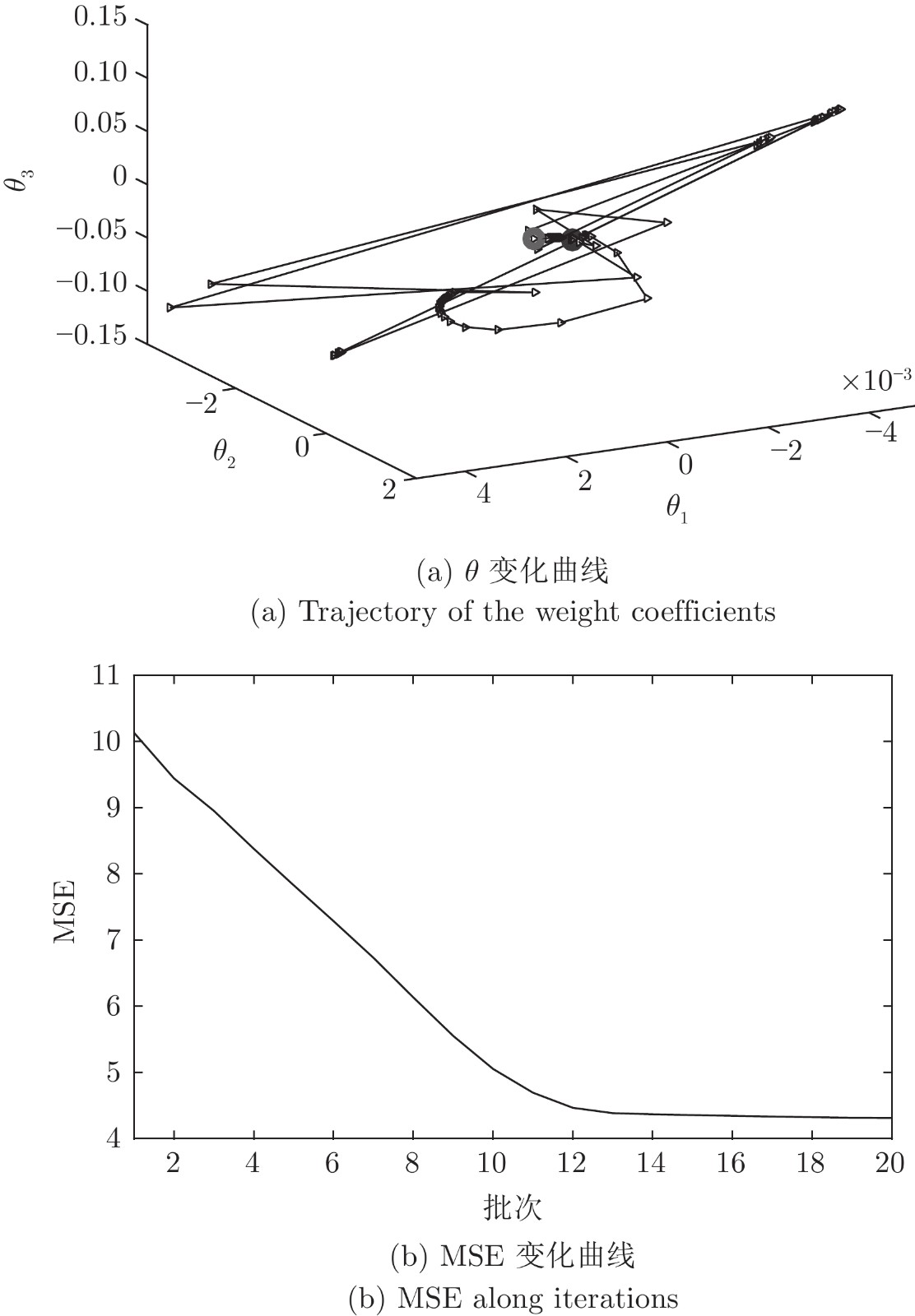
图 13 间歇反应器系统
$ {\boldsymbol{\theta}} $ 变化曲线和MSE变化曲线Fig. 13 The change curves of
$ {\boldsymbol{\theta}} $ and MSE of batch reactor control system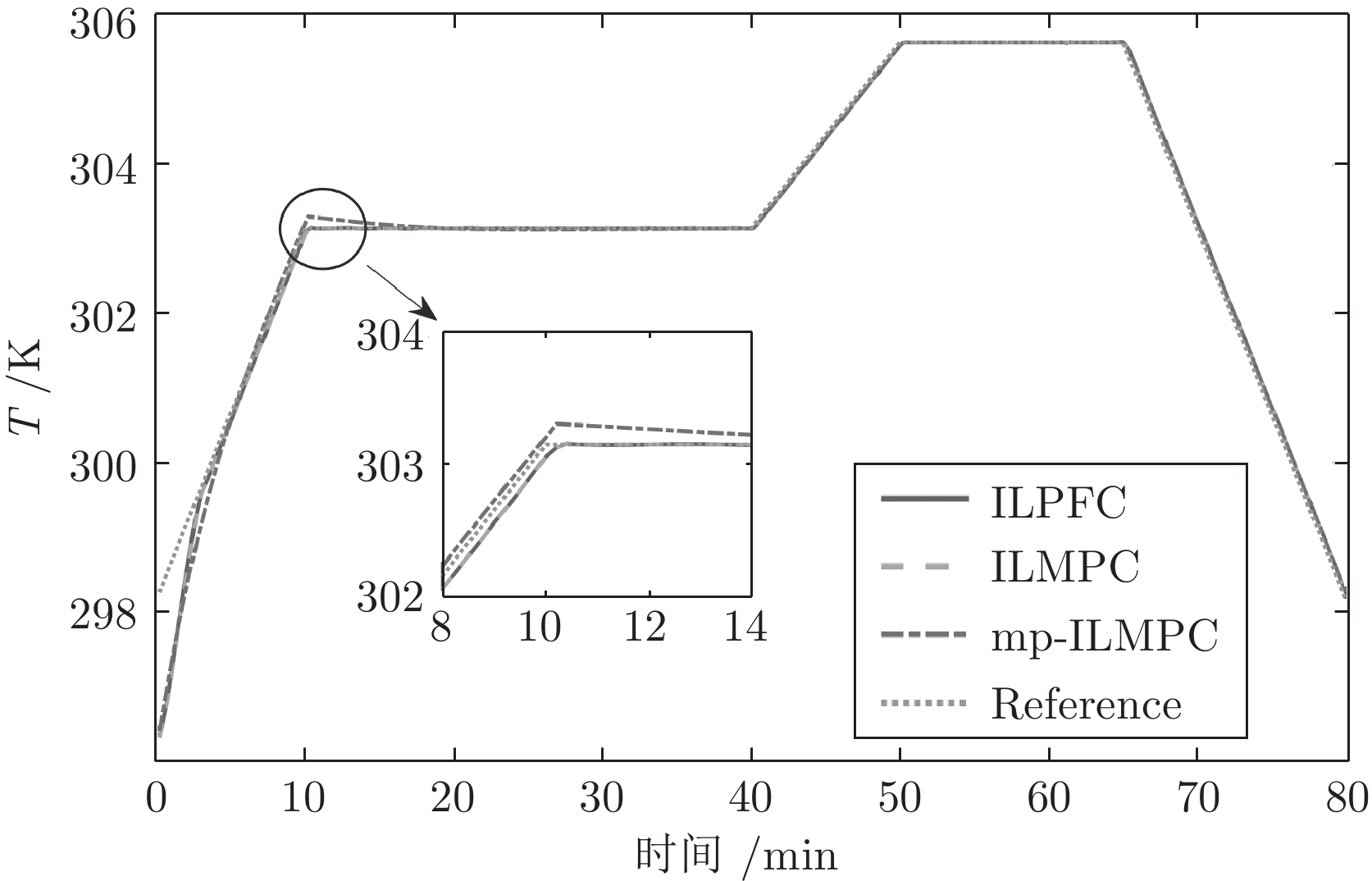
图 14 第20批次ILPFC、ILMPC和mp-ILMPC控制下反应温度跟踪曲线
Fig. 14 The tracking trajectories of the reaction temprature under the ILPFC, ILMPC and mp-ILMPC in the 20th batch
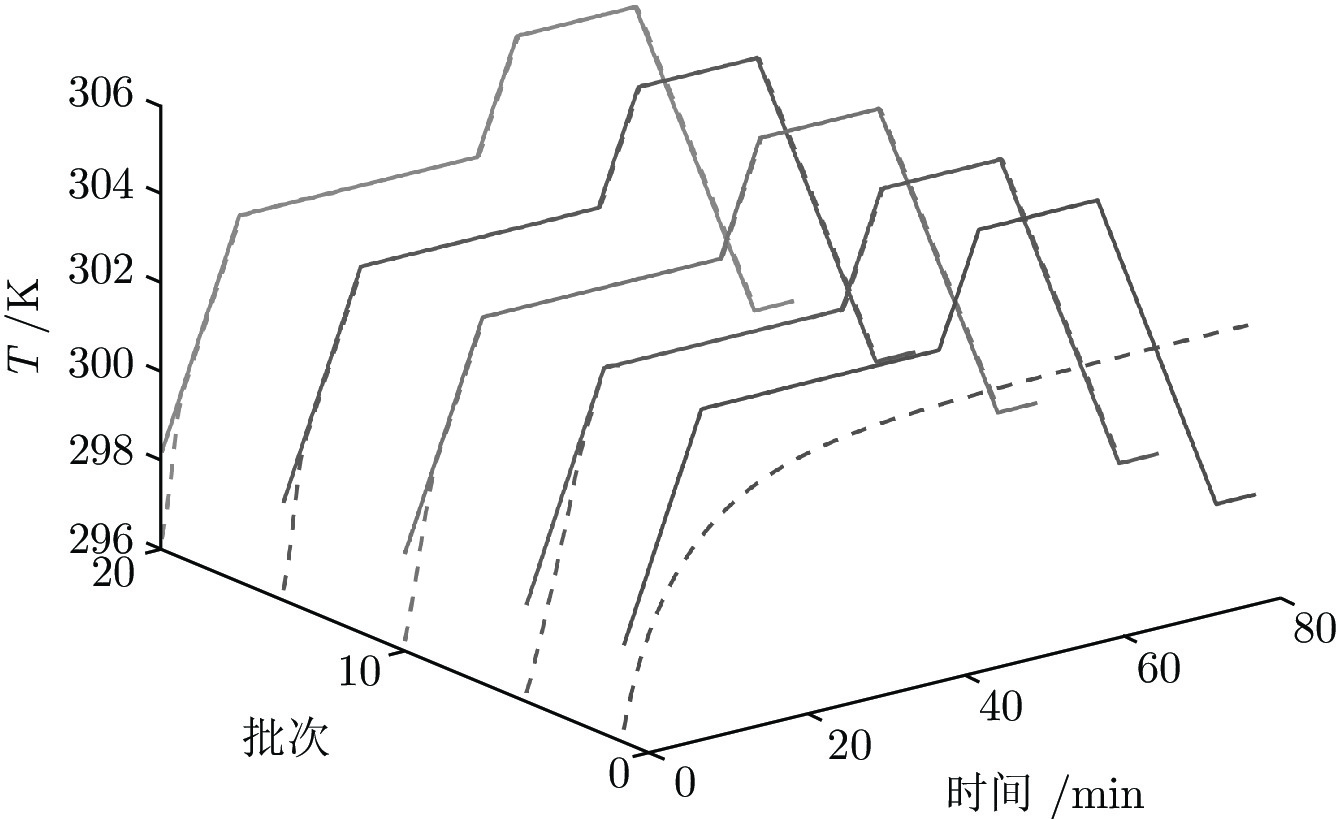
图 15 阶跃初始批次输入下ILPFC温度跟踪曲线
Fig. 15 The tracking trajectories of the reaction temprature
$ T$ under the ILPFC with a step input in the initial batch表 1 ILPFC、ILMPC及mp-ILMPC计算量和跟踪误差比较
Table 1 The comparison of computation time and tracking errors between ILPFC, ILMPC and mp-ILMPC
控制时域 ILPFC平均计算时间 (s)
(Hessian矩阵维数)ILMPC平均计算时间 (s)
(Hessian矩阵维数)mp-ILMPC平均
计算时间 (s)ILPFC
平均 MSEILMPC
平均 MSEmp-ILMPC
平均 MSE10 0.083 (2 × 2) 0.158 (20 × 20) 0.162 3.051 2.878 3.053 15 0.041 (2 × 2) 0.185 (30 × 30) 0.191 2.988 2.734 2.984 20 0.064 (2 × 2) 0.211 (40 × 40) 0.216 2.845 2.627 2.840  下载: 导出CSV
下载: 导出CSV
表 2 ILPFC、ILMPC及mp-ILMPC计算量和跟踪误差比较
Table 2 The comparison of computation time and tracking errors between ILPFC, ILMPC and mp-ILMPC
控制时域 ILPFC平均计算时间 (s)
(Hessian 矩阵维数)ILMPC平均计算时间 (s)
(Hessian 矩阵维数)mp-ILMPC平均
计算时间 (s)ILPFC
平均 MSEILMPC
平均 MSEmp-ILMPC
平均 MSE10 0.067 (3 × 3) 0.108 (10 × 10) 0.197 5.974 5.602 5.992 15 0.052 (3 × 3) 0.255 (15 × 15) 0.361 5.568 5.227 5.603 20 0.061 (3 × 3) 0.412 (20 × 20) 0.502 5.113 4.895 5.121
下载: 导出CSV
-
[1] 卢静宜, 曹志兴, 高福荣. 批次过程控制-回顾与展望. 自动化学报, 2017, 43(6): 933-943Lu Jing-Yi, Cao Zhi-Xing, Gao Fu-Rong. Batch process control-overview and outlook. Acta Automatic Sinica, 2017, 43(6): 933-943 [2] 赵春晖, 王福利, 姚远, 高福荣. 基于时段的间歇过程统计建模、在线监测及质量预报. 自动化学报, 2010, 36(3): 366-374 doi: 10.3724/SP.J.1004.2010.00366Zhao Chun-Hui, Wang Fu-Li, Yao Yuan, Gao Fu-Rong. Phase-based statistical modeling, online monitoring and quality prediction for batch processes. Acta Automatic Sinica, 2010, 36(3): 366-374 doi: 10.3724/SP.J.1004.2010.00366 [3] 池荣虎, 侯忠生, 黄彪. 间歇过程最优迭代学习控制的发展:从基于模型到数据驱动. 自动化学报, 2017, 43(6): 917-932Chi Rong-Hu, Hou Zhong-Sheng, Huang Biao. Optimal iterative learning control of batch processes: from model-based to data-driven. Acta Automatica Sinica, 2017, 43(6): 917-932 [4] Li M, Zhou P, Wang H, Chai T. Geometric analysis based double closed-loop iterative learning control of output PDF shaping of fiber length distribution in refining process. IEEE Transactions on Industrial Electronics, 2019, 66(9): 7229-7238 doi: 10.1109/TIE.2018.2879293 [5] 席裕庚, 李德伟, 林姝. 模型预测控制-现状与挑战. 自动化学报, 2013, 39(3): 221-236Xi Yu-Geng, Li De-Wei, Lin-Shu. Model predictive control-status and challenges. Acta Automatic Sinica, 2013, 39(3): 221-236 [6] 柴天佑, 李少远, 王宏. 网络信息模式下复杂工业过程建模与控制. 自动化学报, 2013, 39(3): 221-236Chai Tian-You, Li Shao-Yuan, Wang Hong. Networked cooperative modeling and control for complex industrial process. Acta Automatic Sinica, 2013, 39(5): 469-470 [7] Lee K S, Chin I S, Lee H J, J. H. Lee. Model predictive control technique combined with iterative learning for batch processes. Aiche Journal, 1999, 45(10): 2175-2187 doi: 10.1002/aic.690451016 [8] Shi J, Zhou H, Cao Z, Jiang Q. A design method for indirect iterative learning control based on two-dimensional generalized predictive control algorithm. Journal of Process Control, 2014, 24(10): 1527-1537 doi: 10.1016/j.jprocont.2014.07.004 [9] Liu X, Kong X. Nonlinear fuzzy model predictive iterative learning control for drum-type boiler-turbine system. Journal of Process Control, 2013, 23(8): 1023-1040 doi: 10.1016/j.jprocont.2013.06.004 [10] Oh S K, Lee J M. Iterative learning model predictive control for constrained multivariable control of batch processes. Computers & Chemical Engineering, 2016, 93(4): 284-292 [11] Lu J, Cao Z, Gao F. Multi-point iterative learning model predictive control. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6230-6240 doi: 10.1109/TIE.2018.2873133 [12] Chu B, Owens D H, Freeman C T. Iterative learning control with predictive trial information: convergence, robustness, and experimental verification. IEEE Transactions on Control Systems Technology, 2016, 24(3): 1101-1108 doi: 10.1109/TCST.2015.2476779 [13] Lu J, Cao Z, Wang Z, Gao F. A two-stage design of two-dimensional model predictive iterative learning control for non-repetitive disturbance attenuation. Industrial & Engineering Chemistry Research, 2015, 54(21): 5683-5689 [14] Wu S, Jin Q, Zhang R, Zhang J, Gao F. Improved design of constrained model predictive tracking control for batch processes against unknown uncertainties. ISA Transactions, 2017, 69: 273-280 doi: 10.1016/j.isatra.2017.04.006 [15] 马乐乐, 刘向杰. 针对变参考轨迹的鲁棒迭代学习模型预测控制算法. 自动化学报, 2019, 45(10): 1933-1945Ma Le-Le, Liu Xiang-Jie. Robust model predictive iterative learning control with iteration-varying reference trajectory. Acta Automatic Sinica, 2019, 45(10): 1933-1945 [16] Bigras P, Lambert M, Perron C. Robust force controller for industrial robots: optimal design and real-Time implementation on a KUKA robot. IEEE Transactions on Control System Technoogy, 2012, 20(2): 473-479 doi: 10.1109/TCST.2011.2112661 [17] Hwang C L, Hung J Y. Stratified adaptive finite-time tracking control for nonlinear uncertain generalized vehicle systems and its application. IEEE Transactions on Control System Technoogy, 2019, 27(3): 1308-1316 doi: 10.1109/TCST.2018.2810851 [18] Sahu J N, Gangadharan P, Patwardhan A V. Catalytic hydrolysis of urea with fly ash for generation of ammonia in a batch reactor for flue gas conditioning and NOx reduction. Industrial & Engineering Chemistry Research, 2009, 48(2): 727-734 [19] Boggs P T, Tolle J W. Sequential quadratic programming for large-scale nonlinear optimization. Journal of Computational & Applied Mathematics, 2000, 124(1): 123-137 [20] Chen Y, Li Z, Kong H, Ke F. Model predictive tracking control of nonholonomic mobile robots with coupled input constraints and unknown dynamics. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3196-3205 doi: 10.1109/TII.2018.2874182 [21] 周洪煜, 张坚, 游立科, 张峰. 基于混合神经网络的非线性预测函数控制. 控制理论与应用, 2005, 22(1): 110-113 doi: 10.3969/j.issn.1000-8152.2005.01.022Zhou Hong-Yu, Zhang Jian, You Li-Ke, Zhang Feng. Nonlinear predictive function control based on hybrid neural network. Control Theory & Applications, 2005, 22(1): 110-113 doi: 10.3969/j.issn.1000-8152.2005.01.022 [22] Zhang R, Wu S and Tao J. A new design of predictive functional control strategy for batch processes in the two-dimensional framework. IEEE Transactions on Industrial Informatics, 2019, 15(5): 2905-2914 doi: 10.1109/TII.2018.2874711 [23] Michalska H, Mayne D Q. Robust receding horizon control of constrained nonlinear systems. IEEE Transactions on Automatic Control, 1993, 38(11): 1623-1633 doi: 10.1109/9.262032 [24] Böhm C, Yu S Y, Allgöwer F. Predictive control for constrained discrete-time periodic systems using a time-varying terminal region. In: Proceedings of the 14th IFAC Conference on Methods and Models in Automation and Robotics, Poland: Elsevier, 2009. 537−542 [25] 张智焕, 王树青, 王宁. 液压机器人的预测函数控制. 控制与决策, 2002, 17(1): 120-122 doi: 10.3321/j.issn:1001-0920.2002.01.031Zhang Zhi-Huan, Wang Shu-Qing, Wang Ning. Predictive function control of hydraulic robot. Control and Decision, 2002, 17(1): 120-122 doi: 10.3321/j.issn:1001-0920.2002.01.031 [26] 潘红华, 苏宏业, 胡剑波, 褚健. 预测函数控制及其在导弹控制系统中的应用. 火力与指挥控制, 2000, 25(2): 56-60 doi: 10.3969/j.issn.1002-0640.2000.02.015Pan Hong-Hua, Su Hong-Ye, Hu Jian-Bo, Chu Jian. Predictive functional control and its application in missile control system. Fire Control & Command Control, 2000, 25(2): 56-60 doi: 10.3969/j.issn.1002-0640.2000.02.015 [27] Bahadorian M, Savkovic B, Eaton R, Hesketh T. Robust model predictive control for automated trajectory tracking of an unmanned ground vehicle. In: Proceedings of the 2012 American Control Conference, Montreal, QC, Canada: IEEE, 2012. 4251−4256 [28] Lee J H, Lee K S, Kim W C. Model-based iterative learning control with a quadratic criterion for time-varying linear systems. Automatica, 2000, 36(5): 641-657 doi: 10.1016/S0005-1098(99)00194-6 -

 下载:
下载:









计量
- 文章访问数: 1234
- HTML全文浏览量: 550
- PDF下载量: 288
- 被引次数: 0
