

Data Analytics and Condition Monitoring Methods for Nonstationary Batch Processes — Current Status and Future
-
摘要: 间歇过程作为制造业的重要生产方式之一, 其高效运行是智能制造的优先主题. 为了保障生产过程的高效运行, 面向间歇生产的过程数据解析与状态监控算法在最近三十年间得到大家的广泛关注, 发展速度稳步提升. 但由于间歇过程本身的多重时变大范围非平稳运行复杂特性, 以及对状态监控与故障诊断要求的提高, 现有的理论和方法仍面临着挑战. 本文从分析间歇过程的特性出发, 从数据解析的角度, 总结了近三十年来非平稳间歇过程高性能监控研究的发展. 一方面对间歇过程监控领域几种经典的方法体系进行了总结和梳理, 另一方面揭示了尚存在的问题以及未来可能的研究思路和发展脉络.Abstract: Batch process is an important class of manufacturing processes. Its condition operation has been given high priority for smart manufacturing, which closely depends on the automatic condition monitoring and fault diagnosis. Great efforts have been made in the research on data analytics and high-efficiency monitoring algorithms with significant development for batch processes during the past thirty years. However, due to its complex characteristics and increasing requirements on monitoring and diagnosis precision, there are still many challenging problems in this field. In this paper, starting from the nature of batch process and data analystics, we address the challenges in this field, review the development of monitoring and diagnosis strategies, analyze several classical algorithms, and discuss the future development of batch process high-efficiency monitoring.
-
Key words:
- Data analytics /
- intelligent manufacturing /
- batch process /
- nonstationary /
- process monitoring /
- fault diagnosis /
- machine learning
-
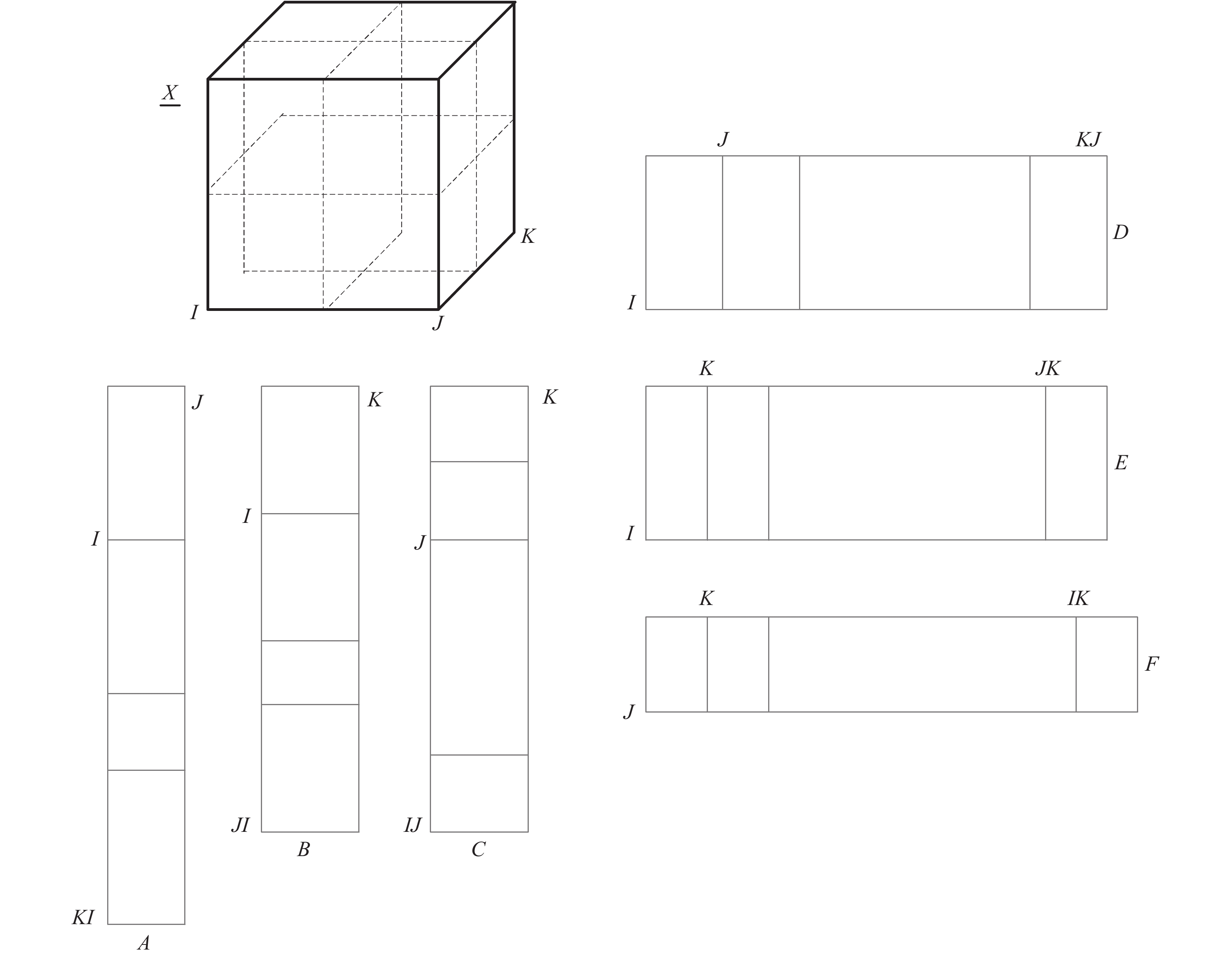
图 3 将三维数据展开成二维数据的6种方式
Fig. 3 Unfold the three dimensions data into two dimensions using six different manners
表 1 时段划分方法总结对比
Table 1 The comparison of different phase partition methods
时段划分方法 划分依据 优点 缺点 过程机理法[45, 48, 72] 利用实际间歇工业过程运行机理的变化来划分过程运行时段, 要求一定的专家经验和过程知识. 如果间歇生产过程相对简单或者工程师对此比较熟悉, 则可以比较容易地获取过程机理知识实现时段划分. 工业生产过程往往机理复杂, 很难在短时间内获取相关的知识和经验, 从而极大地限制和约束了其顺利实施施和推广应用. 特征分析方法[73—75] 时段的切换对应引起相应测量变量的变化. 对某些过程变量或从中提取的特征变量进行分析, 借助其沿时间轴上的变化判断时段信息. 指示变量方法是其中一种典型代表. 当时段发生切换或者变化, 过程特性变化, 相应的某些过程变量或是特征变量亦发生显著变化, 可用于指示不同时段. 算法较为简单. 并不是每个工业过程中都存在并能找到这样的“指示”变量. k-means[62—66] 通过相似度度量, 分析不同时间点上的潜在相关特性的相似与不同, 如果时间片具有相似特性则被归到同一类中, 具有显著差异则被分到不同类中. 该方法能够自动划分不同的多个时段, 不需借助任何过程机理和知识. 分类的结果决定于过程相关性在时间方向上的变化规律. 没有考虑间歇过程时段运行的时序性, 因此划分结果中会出现时间上不连续的具有相似过程相关性的时间片被分在同一个聚类中. 时段划分结果可读性有所欠缺, 需要针对划分结果进行进一步的后续处理. 此外, 该划分方法根据距离定义衡量过程相关特性的相似度, 聚类的结果受到相似性衡量指标的影响, 而该指标并不能与过程监测的目的直接相关. MPPCA[74—75] 一种优化策略, 通过对不同时间点进行不断尝试, 分析在该点的划分所得到的局部模型是否能够改善原有模型对数据的重构精度, 以此来确定该点的划分是否合适. 无需过程先验知识条件, 自动划分的各个时段时间连续, 解释性较强. 易陷入局部最优, 导致时段划分结果不能更好的反映过程特性变化. SSPP[76—77] 自动地按照间歇生产过程运行时间顺序捕捉潜在过程特性的发展变化, 通过评估时段划分对监测统计量的影响确定合适的时段划分点. 无需过程先验知识条件, 深入考虑了间歇过程潜在特性的时变性和实际过程运行的时序性以及时段划分结果对于之后监测性能的影响. 对过程时段特性变化的实时捕捉具有一定的时间延迟.  下载: 导出CSV
下载: 导出CSV
表 2 多向分析方法与子时段分析方法对比
Table 2 The comparison of multi-way methods and phase partition methods
方法 优点 缺点 多向分析法 分析方法相对简单, 直接针对展开的二维数据矩阵进行分析, 可借用传统的连续过程方法. 针对整个过程只需要建立一个模型. 无法有效分析过程特性时间上的变化规律. 子时段分析方法 1)可以更细致地揭示过程运行的潜在特征, 更好地体现过程运行的局部特征, 促进对复杂工业过程的了解;
2)在每个子时段可以很容易建立统计分析模型, 结构简单, 模型实用;
3)基于子时段可以很容易建立过程监测模型并实现在线应用而无需预估未知数据;
4)可以提高在线故障检测的精度和灵敏度, 并有利于后续准确的故障隔离和诊断;
5)可以深入分析质量指标和每个时段的具体关系, 找出影响质量的关键时段和预测变量等关键性因素, 有利于产品质量的进一步改进.需要进行时段划分, 分析过程特性在同一个操作周次内的变化.
下载: 导出CSV
-
[1] 赵春晖, 陆宁云. 间歇过程统计监测与质量分析. 北京: 科学出版社, 2014.Zhao Chun-Hui, Lu Ning-Yun. Statistical Monitoring and Quality Analysis of Batch Process. Beijing: Science Press, 2014. [2] Nomikos P, MacGregor J F. Monitoring batch processes using multiway principal component analysis. AIChE Journal, 1994, 40(8): 1361−1375 doi: 10.1002/aic.690400809 [3] Bhatia T, Biegler L T. Dynamic optimization in the design and scheduling of multiproduct batch plants. Industrial & Engineering Chemistry Research, 1996, 35(7): 2234−2246 [4] Méndez C A, Cerdá J, Grossmann I E, Harjunkoski I, Fahl M. State-of-the-art review of optimization methods for short-term scheduling of batch processes. Computers & Chemical Engineering, 2006, 30(6-7): 913−946 [5] Lane S, Martin E B, Kooijmans R, Morris A J. Performance monitoring of a multi-product semi-batch process. Journal of Process Control, 2001, 11(1): 1−11 doi: 10.1016/S0959-1524(99)00063-3 [6] Edgar T F, Butler S W, Campbell W J, Pfeiffer C, Bode C, Hwang S B, et al. Automatic control in microelectronics manufacturing: Practices, challenges, and possibilities. Automatica, 2000, 36(11): 1567−1603 doi: 10.1016/S0005-1098(00)00084-4 [7] 赵春晖, 王福利. 工业过程运行状态智能监控: 数据驱动方法. 北京: 化学工业出版社, 2019.Zhao Chun-Hui, Wang Fu-Li. Intelligent Monitoring of Industrial Process Operation Status: Data-driven Methods. Beijing: Chemical Industry Press, 2019. [8] Engle R F, Granger C W J. Cointegration and error correction: Representation, estimation and testing. Econometrica, 1987, 55: 251−276 doi: 10.2307/1913236 [9] Khediri I B, Limam M, Weihs C. Variable window adaptive Kernel Principal Component Analysis for nonlinear nonstationary process monitoring. Computers & Industrial Engineering, 2011, 61(3): 437−446 [10] Liu J L, Chen D S. Nonstationary fault detection and diagnosis for multimode processes. AIChE Journal, 2010, 56(1): 207−219 [11] Ündey C, Ertunč S, Mistretta T, Looze B. Applied advanced process analytics in biopharmaceutical manufacturing: Challenges and prospects in real-time monitoring and control. Journal of Process Control, 2010, 20(9): 1009−1018 doi: 10.1016/j.jprocont.2010.05.008 [12] Qin S J. Process data analytics in the era of big data. AIChE Journal, 2014, 60(9): 3092−3100 doi: 10.1002/aic.14523 [13] Chiang L, Lu B, Castillo I. Big data analytics in chemical engineering. Annual Review of Chemical and Biomolecular Engineering, 2017, 8: 63−85 doi: 10.1146/annurev-chembioeng-060816-101555 [14] He Q P, Wang J. Statistical process monitoring as a big data analytics tool for smart manufacturing. Journal of Process Control, 2018, 67: 35−43 doi: 10.1016/j.jprocont.2017.06.012 [15] 卢静宜, 曹志兴, 高福荣. 批次过程控制—回顾与展望. 自动化学报, 2017, 43(6): 933−943Lu Jing-Yi, Cao Zhi-Xing, Gao Fu-Rong. Batch process control—overview and outlook. Acta Automatica Sinica, 2017, 43(6): 933−943 [16] 赵春晖. 多时段间歇过程统计建模、在线监测及质量预报 [博士学位论文], 东北大学, 中国, 2009Zhao Chun-Hui. Statistical Modeling, Online Monitoring and Quality Prediction for Multiphase Batch Processes [Ph.D. dissertation], Northeastern University, China, 2009 [17] Shewhart W A. Statistical Method from the Viewpoint of Quality Control. New York, USA: John Dover, 1986. [18] Page E S. Continuous inspection schemes. Biometrika, 1954, 41(1-2): 100−115 doi: 10.1093/biomet/41.1-2.100 [19] Page E S. Cumulative sum charts. Technometrics, 1961, 3(1): 1−9 doi: 10.1080/00401706.1961.10489922 [20] Roberts S W. Control chart tests based on geometric moving average. Technometrics, 1959, 1(3): 239−250 doi: 10.1080/00401706.1959.10489860 [21] Zhao C H, Sun Y X. Multispace total projiection to latent structures and its application to online proceess monitoring, IEEE Transacttions on Control Systeme Technology, 2014, 22(3): 868-883 [22] Dunteman G H. Principal Component Analysis. London, UK: SAGE Publication LTD, 1989. [23] Jackson J E. A User′s Guide to Principal Components. New York, USA: Wiley, 1991. [24] Geladi P, Kowalski B R. Partial least-squares regression: A tutorial. Analytica Chimica Acta, 1986, 185: 1−17 doi: 10.1016/0003-2670(86)80028-9 [25] Höskuldsson A. PLS regression methods. Journal of Chemometrics, 1988, 2(3): 211−228 doi: 10.1002/cem.1180020306 [26] 王惠文. 偏最小二乘回归方法及其应用. 北京: 国防工业出版社, 1999.Wang Hui-Wen. Partial Least-Squares Regression-Method and Applications. Beijing: National Defense Industry Press, 1999. [27] Dayal B S, MacGregor J F. Improved PLS algorithms. Journal of Chemometrics, 1997, 11(1): 73−85 doi: 10.1002/(SICI)1099-128X(199701)11:1<73::AID-CEM435>3.0.CO;2-# [28] Comon P. Independent component analysis, a new concept? Signal Processing, 1994, 36(3): 287−314 doi: 10.1016/0165-1684(94)90029-9 [29] Hyvärinen A, Oja E. A fast fixed-point algorithm for independent component analysis. Neural Computation, 1997, 9(7): 1483−1492 doi: 10.1162/neco.1997.9.7.1483 [30] Hyvärinen A, Oja E. Independent component analysis: Algorithms and applications. Neural Networks, 2000, 13(4-5): 411−430 doi: 10.1016/S0893-6080(00)00026-5 [31] Kano M, Tanaka S, Hasebe S, Hashimoto I, Ohno H. Monitoring independent components for fault detection. AIChE Journal, 2003, 49(4): 969−976 doi: 10.1002/aic.690490414 [32] Smilde A, Bro R, Geladi P. Multi-Way Analysis, Applications in the Chemical Science. New York, USA: Wiley, 2003. [33] Bro R. PARAFAC. Tutorial and applications. Chemometrics and Intelligent Laboratory Systems, 1997, 38(2): 149−171 doi: 10.1016/S0169-7439(97)00032-4 [34] Tucker L R. The extension of factor analysis to three-dimensional matrices. Contributions to Mathematical Psychology. New York, USA: Holt, Rinehart and Winston, 1964. 110−162 [35] Bro R. Multiway calibration. Multilinear PLS. Journal of Chemometrics, 1996, 10(1): 47−61 doi: 10.1002/(SICI)1099-128X(199601)10:1<47::AID-CEM400>3.0.CO;2-C [36] Sanchez E, Kowalski B R. Tensorial resolution: A direct trilinear decomposition. Journal of Chemometrics, 1990, 4(1): 29−45 doi: 10.1002/cem.1180040105 [37] Louwerse D J, Smilde A K. Multivariate statistical process control of batch processes based on three-way models. Chemical Engineering Science, 2000, 55(7): 1225−1235 doi: 10.1016/S0009-2509(99)00408-X [38] Smilde A K. Comments on three-way analyses used for batch process data. Journal of Chemometrics, 2001, 15(1): 19−27 doi: 10.1002/1099-128X(200101)15:1<19::AID-CEM599>3.0.CO;2-F [39] Nomikos P, MacGregor J F. Monitoring batch processes using multiway principal component analysis. AIChE Journal, 1994, 40(8): 1361−1375 doi: 10.1002/aic.690400809 [40] Nomikos P, MacGregor J F. Multi-way partial least squares in monitoring batch processes. Chemometrics and Intelligent Laboratory Systems, 1995, 30(1): 97−108 doi: 10.1016/0169-7439(95)00043-7 [41] Nomikos P, MacGregor J F. Multivariate SPC charts for monitoring batch processes. Technometrics, 1995, 37(1): 41−59 doi: 10.1080/00401706.1995.10485888 [42] Wold S, Kettaneh N, Fridén H, Holmberg A. Modelling and diagnostics of batch processes and analogous kinetic experiments. Chemometrics and Intelligent Laboratory Systems, 1998, 44(1-2): 331−340 doi: 10.1016/S0169-7439(98)00162-2 [43] Wold S, Geladi P, Esbensen K, Öhman J. Multi-way principal components-and PLS-analysis. Journal of Chemometrics, 1987, 1(1): 41−56 doi: 10.1002/cem.1180010107 [44] Wold S, Sjöström M. Chemometrics, present and future success. Chemometrics and Intelligent Laboratory Systems, 1998, 44(1-2): 3−14 doi: 10.1016/S0169-7439(98)00075-6 [45] Dong D, McAvoy T J. Multi-stage batch process monitoring. In: Proceedings of 1995 American Control Conference (ACC). Seattle, USA: IEEE, 1995. 1857−1861 [46] Zheng L L, McAvoy T J, Huang Y B, Chen G. Application of multivariate statistical analysis in batch processes. Industrial & Engineering Chemistry Research, 2001, 40(7): 1641−1649 [47] Ündey C, Tatara E, Činar A. Intelligent real-time performance monitoring and quality prediction for batch/fed-batch cultivations. Journal of Biotechnology, 2004, 108(1): 61−77 doi: 10.1016/j.jbiotec.2003.10.004 [48] Ündey C, Činar A. Statistical monitoring of multistage, multiphase batch processes. IEEE Control Systems Magazine, 2002, 22(5): 40−52 doi: 10.1109/MCS.2002.1035216 [49] Ündey C, Ertunč S, Činar A. Online batch/fed-batch process performance monitoring, quality prediction, and variable-contribution analysis for diagnosis. Industrial & Engineering Chemistry Research, 2003, 42(20): 4645−4658 [50] Zamprogna E, Barolo M, Seborg D E. Optimal selection of soft sensor inputs for batch distillation columns using principal component analysis. Journal of Process Control, 2005, 15(1): 39−52 doi: 10.1016/j.jprocont.2004.04.006 [51] Zamprogna E, Barolo M, Seborg D E. Estimating product composition profiles in batch distillation via partial least squares regression. Control Engineering Practice, 2004, 12(7): 917−929 doi: 10.1016/j.conengprac.2003.11.005 [52] Kourti T, Nomikos P, MacGregor J F. Analysis, monitoring and fault diagnosis of batch processes using multiblock and multiway PLS. Journal of Process Control, 1995, 5(4): 277−284 doi: 10.1016/0959-1524(95)00019-M [53] Martin E B, Morris A J, Papazoglou M C, Kiparissides C. Batch process monitoring for consistent production. Computers & Chemical Engineering, 1996, 20(Suppl 1): S599−S604 [54] Martin E B, Morris A J. An overview of multivariate statistical process control in continuous and batch process performance monitoring. Transactions of the Institute of Measurement and Control, 1996, 18(1): 51−60 doi: 10.1177/014233129601800107 [55] Lane S, Martin E B, Kooijmans R, Morris A J. Performance monitoring of a multi-product semi-batch process. Journal of Process Control, 2001, 11(1): 1−11 doi: 10.1016/S0959-1524(99)00063-3 [56] Meng X, Morris A J, Martin E B. On-line monitoring of batch processes using a PARAFAC representation. Journal of Chemometrics, 2003, 17(1): 65−81 doi: 10.1002/cem.776 [57] Lee J M, Yoo C K, Lee I B. Enhanced process monitoring of fed-batch penicillin cultivation using time-varying and multivariate statistical analysis. Journal of Biotechnology, 2004, 110(2): 119−136 doi: 10.1016/j.jbiotec.2004.01.016 [58] Albazzaz H, Wang X Z. Statistical process control charts for batch operations based on independent component analysis. Industrial & Engineering Chemistry Research, 2004, 43(21): 6731−6741 [59] Lee J M, Yoo C K, Lee I B. On-line batch process monitoring using different unfolding method and independent component analysis. Journal of Chemical Engineering of Japan, 2003, 36(11): 1384−1396 doi: 10.1252/jcej.36.1384 [60] Albert S, Kinley R D. Multivariate statistical monitoring of batch processes: An industrial case study of fermentation supervision. Trends in Biotechnology, 2001, 19(2): 53−62 doi: 10.1016/S0167-7799(00)01528-6 [61] Wong C W L, Escott R, Martin E B, Morris A J. The integration of spectroscopic and process data for enhanced process performance monitoring. The Canadian Journal of Chemical Engineering, 2008, 86(5): 905−923 doi: 10.1002/cjce.20096 [62] Lu N Y, Gao F R, Wang F L. A sub-PCA modeling and on-line monitoring strategy for batch processes. AIChE Journal, 2004, 50(1): 255−259 doi: 10.1002/aic.10024 [63] Lu N Y, Gao F R. Stage-based process analysis and quality prediction for batch processes. Industrial & Engineering Chemistry Research, 2005, 44(10): 3547−3555 [64] Lu N Y, Gao F R. Stage-based online quality control for batch processes. Industrial & Engineering Chemistry Research, 2006, 45(7): 2272−2280 [65] Zhao C H, Wang F L, Lu N Y, Jia M X. Stage-based soft-transition multiple PCA modeling and on-line monitoring strategy for batch processes. Journal of Process Control, 2007, 17(9): 728−741 doi: 10.1016/j.jprocont.2007.02.005 [66] Zhao C H, Wang F L, Mao Z H, Lu N Y, Jia M X. Improved knowledge extraction and phase-based quality prediction for batch processes. Industrial & Engineering Chemistry Research, 2008, 47(3): 825−834 [67] Zhao C H, Sun Y X. Step-wise sequential phase partition (SSPP) algorithm based statistical modeling and online process monitoring. Chemometrics and Intelligent Laboratory Systems, 2013, 125: 109−120 doi: 10.1016/j.chemolab.2013.03.017 [68] Zhao C H. A quality-relevant sequential phase partition approach for regression modeling and quality prediction analysis in manufacturing processes. IEEE Transactions on Automation Science and Engineering, 2014, 11(4): 983−991 doi: 10.1109/TASE.2013.2287347 [69] Qin Y, Zhao C H, Gao F R. An Iterative Two-Step Sequential Phase Partition (ITSPP) method for batch process modeling and online monitoring. AIChE Journal, 2016, 62(7): 2358−2373 doi: 10.1002/aic.15205 [70] Zhang S M, Zhao C H. Slow-feature-analysis-based batch process monitoring with comprehensive interpretation of operation condition deviation and dynamic anomaly. IEEE Transactions on Industrial Electronics, 2019, 66(5): 3773−3783 doi: 10.1109/TIE.2018.2853603 [71] Zhao C H. An iterative within-phase relative analysis algorithm for relative sub-phase modeling and process monitoring. Chemometrics and Intelligent Laboratory Systems, 2014, 134: 67−78 doi: 10.1016/j.chemolab.2014.03.010 [72] Kosanovich K A, Piovoso M J, Dahl K S, MacGregor J F, Nomikos P. Multi-way PCA applied to an industrial batch process. In: Proceedings of 1994 American Control Conference (ACC). Baltimore, USA: IEEE, 1994. 1294−1298 [73] Kosanovich K A, Dahl K S, Piovoso M J. Improved process understanding using multiway principal component analysis. Industrial & Engineering Chemistry Research, 1996, 35(1): 138−146 [74] Lennox B, Hiden H G, Montague G A, Kornfeld G, Goulding P R. Application of multivariate statistical process control to batch operations. Computers & Chemical Engineering, 2000, 24(2-7): 291−296 [75] Doan X T, Srinivasan R, Bapat P M, Wangikar P P. Detection of phase shifts in batch fermentation via statistical analysis of the online measurements: A case study with rifamycin B fermentation. Journal of Biotechnology, 2007, 132(2): 156−166 doi: 10.1016/j.jbiotec.2007.06.013 [76] Camacho J, Picó J. Online monitoring of batch processes using multi-phase principal component analysis. Journal of Process Control, 2006, 16(10): 1021−1035 doi: 10.1016/j.jprocont.2006.07.005 [77] Camacho J, Picó J. Multi-phase principal component analysis for batch processes modelling. Chemometrics and Intelligent Laboratory Systems, 2006, 81(2): 127−136 doi: 10.1016/j.chemolab.2005.11.003 [78] Martin E B, Morris A J. Enhanced bio-manufacturing through advanced multivariate statistical technologies. Journal of Biotechnology, 2002, 99(3): 223−235 doi: 10.1016/S0168-1656(02)00212-2 [79] Duchesne C, MacGregor J F. Multivariate analysis and optimization of process variable trajectories for batch processes. Chemometrics and Intelligent Laboratory Systems, 2000, 51(1): 125−137 doi: 10.1016/S0169-7439(00)00064-2 [80] Rothwell S G, Martin E B, Morris A J. Comparison of methods for dealing with uneven length batches. IFAC Proceedings Volumes, 1998, 31(8): 387−392 doi: 10.1016/S1474-6670(17)40216-3 [81] Kassidas A, MacGregor J F, Taylor P A. Synchronization of batch trajectories using dynamic time warping. AIChE Journal, 1998, 44(4): 864−875 doi: 10.1002/aic.690440412 [82] Kourti T. Multivariate dynamic data modeling for analysis and statistical process control of batch processes, start-ups and grade transitions. Journal of Chemometrics, 2003, 17(1): 93−109 doi: 10.1002/cem.778 [83] Yu W K, Zhao C H, Zhang S M. A two-step parallel phase partition algorithm for monitoring multiphase batch processes with limited batches. IFAC-PapersOnLine, 2017, 50(1): 2750−2755 doi: 10.1016/j.ifacol.2017.08.582 [84] Itakura F. Minimum prediction residual principle applied to speech recognition. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1975, 23(1): 67−72 doi: 10.1109/TASSP.1975.1162641 [85] Sakoe H, Chiba S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1978, 26(1): 43−49 doi: 10.1109/TASSP.1978.1163055 [86] Tomasi G, van den Berg F, Andersson C. Correlation optimized warping and dynamic time warping as preprocessing methods for chromatographic data. Journal of Chemometrics, 2004, 18(5): 231−241 doi: 10.1002/cem.859 [87] Nielsen N P V, Carstensen J M, Smedsgaard J. Aligning of single and multiple wavelength chromatographic profiles for chemometric data analysis using correlation optimised warping. Journal of Chromatography A, 1998, 805(1-2): 17−35 doi: 10.1016/S0021-9673(98)00021-1 [88] Kourti T, Lee J, MacGregor J F. Experiences with industrial applications of projection methods for multivariate statistical process control. Computers & Chemical Engineering, 1996, 20(1): S745−S750 [89] Tates A A, Louwerse D J, Smilde A K, Koot G L M, Berndt H. Monitoring a PVC batch process with multivariate statistical process control charts. Industrial & Engineering Chemistry Research, 1999, 38(12): 4769−4776 [90] Neogi D, Schlags C E. Multivariate statistical analysis of an emulsion batch process. Industrial & Engineering Chemistry Research, 1998, 37(10): 3971−3979 [91] Kaistha N, Moore C F. Extraction of event times in batch profiles for time synchronization and quality predictions. Industrial & Engineering Chemistry Research, 2001, 40(1): 252−260 [92] Lu N, Gao F, Yang Y, Wang F. PCA-based modeling and on-line monitoring strategy for uneven-length batch processes. Industrial & Engineering Chemistry Research, 2004, 43(13): 3343−3352 [93] Zhao C H, Mo S Y, Gao F R, Lu N Y, Yao Y. Statistical analysis and online monitoring for handling multiphase batch processes with varying durations. Journal of Process Control, 2011, 21(6): 817−829 doi: 10.1016/j.jprocont.2011.04.005 [94] Li W Q, Zhao C H, Gao F R. Sequential time slice alignment based unequal-length phase identification and modeling for fault detection of irregular batches. Industrial & Engineering Chemistry Research, 2015, 54(41): 10020−10030 [95] Zhang S M, Zhao C H, Wang S, Wang F L. Pseudo time-slice construction using a variable moving window k nearest neighbor rule for sequential uneven phase division and batch process monitoring. Industrial & Engineering Chemistry Research, 2017, 56(3): 728−740 [96] Lu N Y, Yang Y, Wang F L, Gao F R. A stage-based monitoring method for batch processes with limited reference data. IFAC Proceedings Volumes, 2004, 37(9): 787−792 doi: 10.1016/S1474-6670(17)31906-7 [97] Zhao C H, Wang F L, Mao Z Z, Lu N Y, Jia M X. Adaptive monitoring based on independent component analysis for multiphase batch processes with limited modeling data. Industrial & Engineering Chemistry Research, 2008, 47(9): 3104−3113 [98] Wang Y, Mao Z, Jia M. Feature-points-based Multimodel Single Dynamic Kernel Principle Component Analysis (M-SDKPCA) modeling and online monitoring strategy for uneven-length batch processes. Industrial & Engineering Chemistry Research, 2013, 52(34): 12059−12071 [99] Luo L J, Bao S Y, Mao J F, Tang D. Phase partition and phase-based process monitoring methods for multiphase batch processes with uneven durations. Industrial & Engineering Chemistry Research, 2016, 55(7): 2035−2048 [100] Tulsyan A, Garvin C, Undey C. Industrial batch process monitoring with limited data. Journal of Process Control, 2019, 77: 114−133 doi: 10.1016/j.jprocont.2019.03.002 [101] Zhao C H, Wang F L, Gao F R, Lu N Y, Jia M X. Adaptive monitoring method for batch processes based on phase dissimilarity updating with limited modeling data. Industrial & Engineering Chemistry Research, 2007, 46(14): 4943−4953 [102] Kuzborskij I, Orabona F, Caputo B. From N to N+1: Multiclass transfer incremental learning. In: Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland, USA: IEEE, 2013. 3358−3365 [103] Chen C L P, Liu Z L. Broad learning system: An effective and efficient incremental learning system without the need for deep architecture. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 10−24 doi: 10.1109/TNNLS.2017.2716952 [104] Yu W K, Zhao C H. Broad convolutional neural network based industrial process fault diagnosis with incremental learning capability. IEEE Transactions on Industrial Electronics, 2020, 67(6): 5081−5091 doi: 10.1109/TIE.2019.2931255 [105] Zhao C H, Wang W, Qin Y, Gao F R. Comprehensive subspace decomposition with analysis of between-mode relative changes for multimode process monitoring. Industrial & Engineering Chemistry Research, 2015, 54(12): 3154−3166 [106] Zhao C H. Concurrent phase partition and between-mode statistical analysis for multimode and multiphase batch process monitoring. AIChE Journal, 2014, 60(2): 559−573 doi: 10.1002/aic.14282 [107] Zhang S M, Zhao C H, Gao F R. Two-directional concurrent strategy of mode identification and sequential phase division for multimode and multiphase batch process monitoring with uneven lengths. Chemical Engineering Science, 2018, 178: 104−117 doi: 10.1016/j.ces.2017.12.025 [108] Zhao C H. Phase analysis and statistical modeling with limited batches for multimode and multiphase process monitoring. Journal of Process Control, 2014, 24(6): 856−870 doi: 10.1016/j.jprocont.2014.04.001 [109] Kramer M A. Nonlinear principal component analysis using autoassociative neural networks. AIChE Journal, 1991, 37(2): 233−243 doi: 10.1002/aic.690370209 [110] Dong D, McAvoy T J. Batch tracking via nonlinear principal component analysis. AIChE Journal, 1996, 42(8): 2199−2208 doi: 10.1002/aic.690420810 [111] Hinton G E, Salakhutdinov R R. Reducing the dimensionality of data with neural networks. Science, 2006, 313(5786): 504−507 doi: 10.1126/science.1127647 [112] Yu W K, Zhao C H. Robust monitoring and fault isolation of nonlinear industrial processes using denoising autoencoder and elastic net. IEEE Transactions on Control Systems Technology, 2020, 28(3): 1083−1091 doi: 10.1109/TCST.2019.2897946 [113] Lee J M, Yoo C K, Choi S W, Vanrolleghem P A, Lee I B. Nonlinear process monitoring using kernel principal component analysis. Chemical Engineering Science, 2004, 59(1): 223−234 doi: 10.1016/j.ces.2003.09.012 [114] Kruger U, Antory D, Hahn J, Irwin G W, McCullough G. Introduction of a nonlinearity measure for principal component models. Computers & Chemical Engineering, 2005, 29(11-12): 2355−2362 [115] Zhang S M, Wang F L, Zhao L P, Wang S, Chang Y Q. A novel strategy of the data characteristics test for selecting a process monitoring method automatically. Industrial & Engineering Chemistry Research, 2016, 55(6): 1642−1654 [116] Li W Q, Zhao C H, Gao F R. Linearity evaluation and variable subset partition based hierarchical process modeling and monitoring. IEEE Transactions on Industrial Electronics, 2018, 65(3): 2683−2692 doi: 10.1109/TIE.2017.2745452 [117] Yan W W, Guo P J, Gong L, Li Z K. Nonlinear and robust statistical process monitoring based on variant autoencoders. Chemometrics and Intelligent Laboratory Systems, 2016, 158: 31−40 doi: 10.1016/j.chemolab.2016.08.007 [118] Zhang X, Yan W W, Zhao X, Shao H H. Nonlinear biological batch process monitoring and fault identification based on kernel fisher discriminant analysis. Process Biochemistry, 2007, 42(8): 1200−1210 doi: 10.1016/j.procbio.2007.05.016 [119] Zhao C H, Gao F R, Wang F L. Nonlinear batch process monitoring using phase-based kernel-independent component analysis-Principal Component Analysis (KICA-PCA). Industrial & Engineering Chemistry Research, 2009, 48(20): 9163−9174 [120] Rashid M M, Yu J. Nonlinear and non-Gaussian dynamic batch process monitoring using a new multiway kernel independent component analysis and multidimensional mutual information based dissimilarity approach. Industrial & Engineering Chemistry Research, 2012, 51(33): 10910−10920 [121] Onel M, Kieslich C A, Guzman Y A, Floudas C A, Pistikopoulos E N. Big data approach to batch process monitoring: Simultaneous fault detection and diagnosis using nonlinear support vector machine-based feature selection. Computers & Chemical Engineering, 2018, 115: 46−63 [122] 刘育明. 动态过程数据的多变量统计监控方法研究 [博士学位论文], 浙江大学, 中国, 2006Liu Yu-Ming. Multivariate Statistical Monitoring Methods for Dynamic Process Data [Ph.D. dissertation], Zhejiang University, China, 2006 [123] Wang Y J, Sun F M, Li B. Multiscale neighborhood normalization-based multiple dynamic PCA monitoring method for batch processes with frequent operations. IEEE Transactions on Automation Science and Engineering, 2018, 15(3): 1053−1064 doi: 10.1109/TASE.2017.2713800 [124] Dong Y N, Qin S J. A novel dynamic PCA algorithm for dynamic data modeling and process monitoring. Journal of Process Control, 2018, 67: 1−11 doi: 10.1016/j.jprocont.2017.05.002 [125] Dong Y N, Qin S J. Regression on dynamic PLS structures for supervised learning of dynamic data. Journal of Process Control, 2018, 68: 64−72 doi: 10.1016/j.jprocont.2018.04.006 [126] Chen J H, Liu K C. On-line batch process monitoring using dynamic PCA and dynamic PLS models. Chemical Engineering Science, 2002, 57(1): 63−75 doi: 10.1016/S0009-2509(01)00366-9 [127] Hu K L, Yuan J Q. Statistical monitoring of fed-batch process using dynamic multiway neighborhood preserving embedding. Chemometrics and Intelligent Laboratory Systems, 2008, 90(2): 195−203 doi: 10.1016/j.chemolab.2007.10.002 [128] Stubbs S, Zhang J, Morris J. Fault detection in dynamic processes using a simplified monitoring-specific CVA state space modelling approach. Computers & Chemical Engineering, 2012, 41: 77−87 [129] Lu Q G, Jiang B B, Gopaluni R B, Loewen P D, Braatz R D. Sparse canonical variate analysis approach for process monitoring. Journal of Process Control, 2018, 71: 90−102 doi: 10.1016/j.jprocont.2018.09.009 [130] 邹筱瑜, 王福利, 常玉清, 郑伟. 基于两层分块GMM-PRS的流程工业过程运行状态评价. 自动化学报, 2019, 45(11): 2071−2081Zou Xiao-Yu, Wang Fu-Li, Chang Yu-Qing, Zheng Wei. Plant-wide process operating performance assessment based on two-level multi-block GMM-PRS. Acta Automatica Sinica, 2019, 45(11): 2071−2081 [131] Fan L, Kodamana H, Huang B. Semi-supervised dynamic latent variable modeling: I/O probabilistic slow feature analysis approach. AIChE Journal, 2019, 65(3): 964−979 doi: 10.1002/aic.16481 [132] Shang C, Huang B, Yang F, Huang D X. Slow feature analysis for monitoring and diagnosis of control performance. Journal of Process Control, 2016, 39: 21−34 doi: 10.1016/j.jprocont.2015.12.004 [133] Zhang S M, Zhao C H, Huang B. Simultaneous static and dynamic analysis for fine-scale identification of process operation statuses. IEEE Transactions on Industrial Informatics, 2019, 15(9): 5320−5329 doi: 10.1109/TII.2019.2896987 [134] Zou X Y, Zhao C H. Concurrent assessment of process operating performance with joint static and dynamic analysis. IEEE Transactions on Industrial Informatics, 2020, 16(4): 2776−2786 doi: 10.1109/TII.2019.2934757 [135] Li W Q, Zhao C H, Huang B. Distributed dynamic modeling and monitoring for large-scale industrial processes under closed-loop control. Industrial & Engineering Chemistry Research, 2018, 57(46): 15759−15772 [136] Zhao C H, Huang B. A Full-condition monitoring method for nonstationary dynamic chemical processes with cointegration and slow feature analysis. AIChE Journal, 2018, 64(5): 1662−1681 doi: 10.1002/aic.16048 [137] Choi S W, Morris J, Lee I B. Dynamic model-based batch process monitoring. Chemical Engineering Science, 2008, 63(3): 622−636 doi: 10.1016/j.ces.2007.09.046 [138] Zheng J L, Zhao C H. Online monitoring of performance variations and process dynamic anomalies with performance-relevant full decomposition of slow feature analysis. Journal of Process Control, 2019, 80: 89−102 doi: 10.1016/j.jprocont.2019.05.004 [139] Yu W K, Zhao C H. Recursive exponential slow feature analysis for fine-scale adaptive processes monitoring with comprehensive operation status identification. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3311−3323 doi: 10.1109/TII.2018.2878405 [140] Zhao C H, Sun H. Dynamic distributed monitoring strategy for large-scale nonstationary processes subject to frequently varying conditions under closed-loop control. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4749−4758 doi: 10.1109/TIE.2018.2864703 [141] Duda R O, Hart P E. Pattern Classification and Scene Analysis. New York: USA: Wiley, 1973 [142] Yu W K, Zhao C H. Sparse exponential discriminant analysis and its application to fault diagnosis. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5931−5940 doi: 10.1109/TIE.2017.2782232 [143] Yu W K, Zhao C H. Online fault diagnosis in industrial processes using multimodel exponential discriminant analysis algorithm. IEEE Transactions on Control Systems Technology, 2019, 27(3): 1317−1325 doi: 10.1109/TCST.2017.2789188 [144] Chai Z, Zhao C H. A fine-grained adversarial network method for cross-domain industrial fault diagnosis. IEEE Transactions on Automation Science and Engineering, 2020, 17(3): 1432−1442 doi: 10.1109/TASE.2019.2957232 [145] Chiang L H, Kotanchek M E, Kordon A K. Fault diagnosis based on Fisher discriminant analysis and support vector machines. Computers & Chemical Engineering, 2004, 28(8): 1389−1401 [146] Chai Z, Zhao C H. Enhanced random forest with concurrent analysis of static and dynamic nodes for industrial fault classification. IEEE Transactions on Industrial Informatics, 2020, 16(1): 54−66 doi: 10.1109/TII.2019.2915559 [147] Yu W K, Zhao C H. Online fault diagnosis for industrial processes with Bayesian network-based probabilistic ensemble learning strategy. IEEE Transactions on Automation Science and Engineering, 2019, 16(4): 1922−1932 doi: 10.1109/TASE.2019.2915286 [148] Westerhuis J A, Gurden S P, Smilde A K. Generalized contribution plots in multivariate statistical process monitoring. Chemometrics and Intelligent Laboratory Systems, 2000, 51(1): 95−114 doi: 10.1016/S0169-7439(00)00062-9 [149] Alcala C F, Qin S J. Reconstruction-based contribution for process monitoring with kernel principal component analysis. Industrial & Engineering Chemistry Research, 2010, 49(71): 7849−7857 [150] Dunia R, Qin S J. Subspace approach to multidimensional fault identification and reconstruction. AIChE Journal, 1998, 44(8): 1813−1831 doi: 10.1002/aic.690440812 [151] Zhao C H, Sun Y X. Subspace decomposition approach of fault deviations and its application to fault reconstruction. Control Engineering Practice, 2013, 21(10): 1396−1409 doi: 10.1016/j.conengprac.2013.06.008 [152] Zhao C H, Gao F R. Online fault prognosis with relative deviation analysis and vector autoregressive modeling. Chemical Engineering Science, 2015, 138: 531−543 doi: 10.1016/j.ces.2015.08.037 [153] Zhao C H, Gao F R. Subspace decomposition-based reconstruction modeling for fault diagnosis in multiphase batch processes. Industrial & Engineering Chemistry Research, 2013, 52(41): 14613−14626 [154] Zhao C H, Zhang W D. Reconstruction based fault diagnosis using concurrent phase partition and analysis of relative changes for multiphase batch processes with limited fault batches. Chemometrics and Intelligent Laboratory Systems, 2014, 130: 135−150 doi: 10.1016/j.chemolab.2013.10.014 [155] Sun H, Zhang S M, Zhao C H, Gao F R. A sparse reconstruction strategy for online fault diagnosis in nonstationary processes with no a priori fault information. Industrial & Engineering Chemistry Research, 2017, 56(24): 6993−7008 [156] Wu J, Zhao J S. Deep convolutional neural network model based chemical process fault diagnosis. Computers & Chemical Engineering, 2018, 115: 185−197 [157] Peng K X, Zhang K, You B, Dong J, Wang Z D. A quality-based nonlinear fault diagnosis framework focusing on industrial multimode batch processes. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2615−2624 [158] Zhao X Q, Wang T. Tensor dynamic neighborhood preserving embedding algorithm for fault diagnosis of batch process. Chemometrics and Intelligent Laboratory Systems, 2017, 162: 94−103 doi: 10.1016/j.chemolab.2017.01.007 [159] Yang C M, Hou J. Fed-batch fermentation penicillin process fault diagnosis and detection based on support vector machine. Neurocomputing, 2016, 190: 117−123 doi: 10.1016/j.neucom.2016.01.027 [160] Cerrada M, Zurita G, Cabrera D, Sánchez R V, Artés M, Li C. Fault diagnosis in spur gears based on genetic algorithm and random forest. Mechanical Systems and Signal Processing, 2016, 70-71: 87−103 doi: 10.1016/j.ymssp.2015.08.030 [161] Zou X Y, Wang F L, Chang Y Q. Assessment of operating performance using cross-domain feature transfer learning. Control Engineering Practice, 2019, 89: 143−153 doi: 10.1016/j.conengprac.2019.05.007 [162] 周东华, 刘洋, 何潇. 闭环系统故障诊断技术综述. 自动化学报, 2013, 39(11): 1933−1943 doi: 10.3724/SP.J.1004.2013.01933Zhou Dong-Hua, Liu Yang, He Xiao. Review on fault diagnosis techniques for closed-loop systems. Acta Automatica Sinica, 2013, 39(11): 1933−1943 doi: 10.3724/SP.J.1004.2013.01933 [163] Zou X Y, Zhao C H. Meticulous assessment of operating performance for processes with a hybrid of stationary and nonstationary variables. Industrial & Engineering Chemistry Research, 2019, 58(3): 1341−1351 [164] Zhao C H, Gao F R. Fault subspace selection approach combined with analysis of relative changes for reconstruction modeling and multifault diagnosis. IEEE Transactions on Control Systems Technology, 2016, 24(3): 928−939 doi: 10.1109/TCST.2015.2464331 [165] Qin Y, Zhao C H, Gao F R. An intelligent non-optimality self-recovery method based on reinforcement learning with small data in big data era. Chemometrics and Intelligent Laboratory Systems, 2018, 176: 89−100 doi: 10.1016/j.chemolab.2018.03.010 [166] Sutton R S, Barto A G. Reinforcement Learning: An Introduction (Second edition). Cambridge: MIT Press, 2018. [167] Lewis F L, Vrabie D. Reinforcement learning and adaptive dynamic programming for feedback control. IEEE Circuits and Systems Magazine, 2009, 9(3): 32−50 doi: 10.1109/MCAS.2009.933854 [168] Wu H, Zhao J S. Deep convolutional neural network model based chemical process fault diagnosis. Computers & Chemical Engineering, 2018, 115: 185−197 [169] Wang H, Yuan Z L, Chen Y B, Shen B Y, Wu A X. An industrial missing values processing method based on generating model. Computer Networks, 2019, 158: 61−68 doi: 10.1016/j.comnet.2019.02.007 [170] Yuan X F, Li L, Wang Y L. Nonlinear dynamic soft sensor modeling with supervised long short-term memory network. IEEE Transactions on Industrial Informatics, 2020, 16(5): 3168−3176 doi: 10.1109/TII.2019.2902129 -

 下载:
下载:





图(6) / 表(2)
计量
- 文章访问数: 6523
- HTML全文浏览量: 8896
- PDF下载量: 586
- 被引次数: 0
