

-
摘要: 智能电网中的隐匿虚假数据入侵(False data injection, FDI)攻击能够绕过坏数据检测机制, 导致控制中心做出错误的状态估计, 进而干扰电力系统的正常运行. 由于电网系统具有复杂的拓扑结构, 故基于传统机器学习的攻击信号检测方法存在维度过高带来的过拟合问题, 而深度学习检测方法则存在训练时间长、占用大量计算资源的问题. 为此, 针对智能电网中的隐匿FDI攻击信号, 提出了基于拉普拉斯特征映射降维的神经网络检测学习算法, 不仅降低了陷入过拟合的风险, 同时也提高了隐匿FDI攻击检测学习算法的泛化能力. 最后, 在IEEE57-Bus电力系统模型中验证了所提方法的优点和有效性.
-
关键词:
- 智能电网 /
- 隐匿虚假数据入侵攻击 /
- 拉普拉斯特征映射 /
- 神经网络
Abstract: The stealthy false data injection (FDI) attack in smart grids can bypass the bad data detection, making an incorrect state estimate in the control center, which in turn interferes with the normal operation of the power system. Considering the complex topology of the grid system, the machine learningbased methods has an over-fitting problem caused by high dimensionality, while deep learning-based methods are subject to long training time and occupy a lot of computing resources. Motivated by the above fact, a neural network learning algorithm based on dimensional reduction of Laplacian eigenmaps (LE) is developed in this paper to detect hidden FDI attack signal in the smart grids. The proposed method not only reduces the risk of over-fitting, but also improves the generalization ability of the stealthy FDI attack detection learning algorithm. Finally, IEEE 57-Bus power system is employed to show the advantages and effectiveness of the proposed method. -
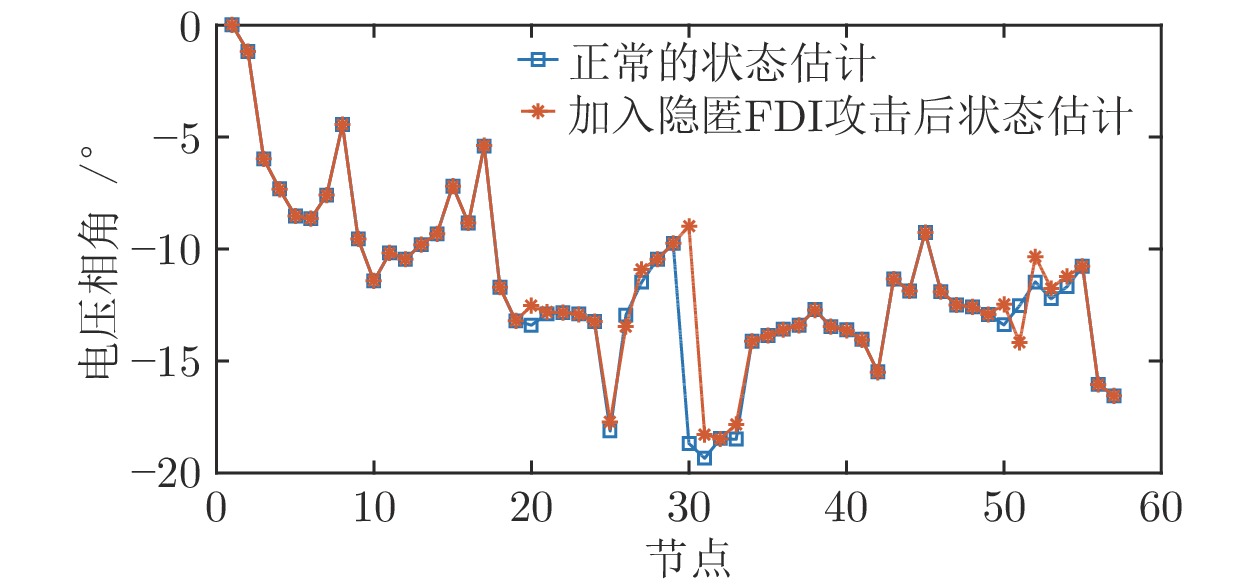
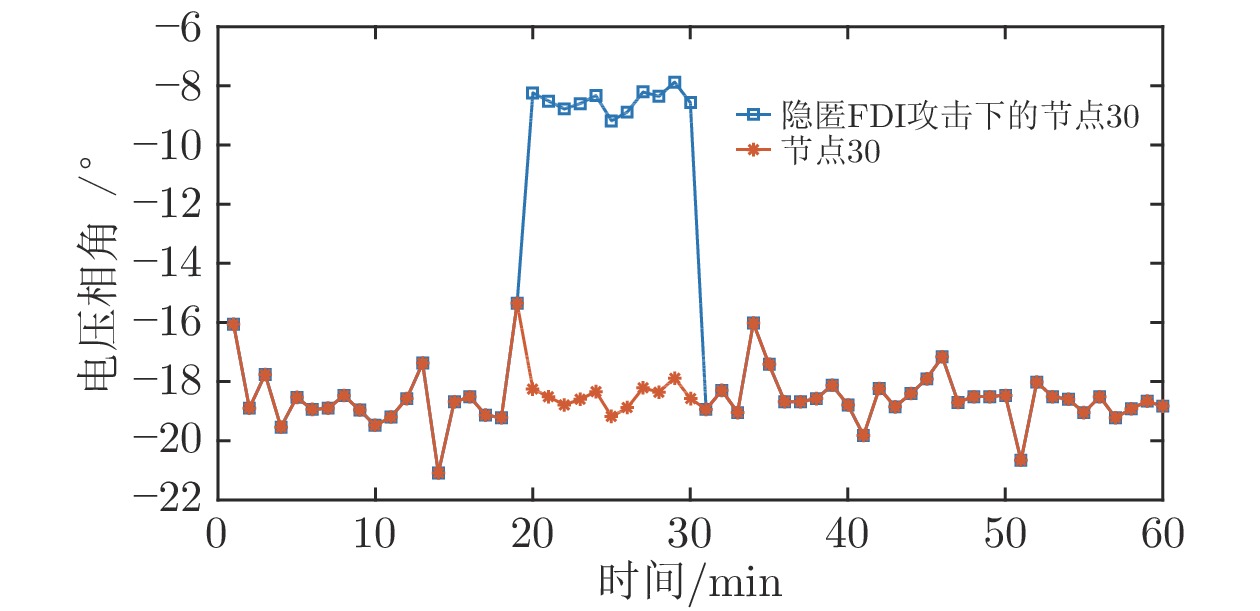
图 4 隐匿FDI攻击对系统状态估计的影响
Fig. 4 The effect of stealthy FDI attack on system state estimation

图 11 四种检测机制在不同隐患测量数k下的误报率FPR
Fig. 11 The false positive rate of four detection mechanisms
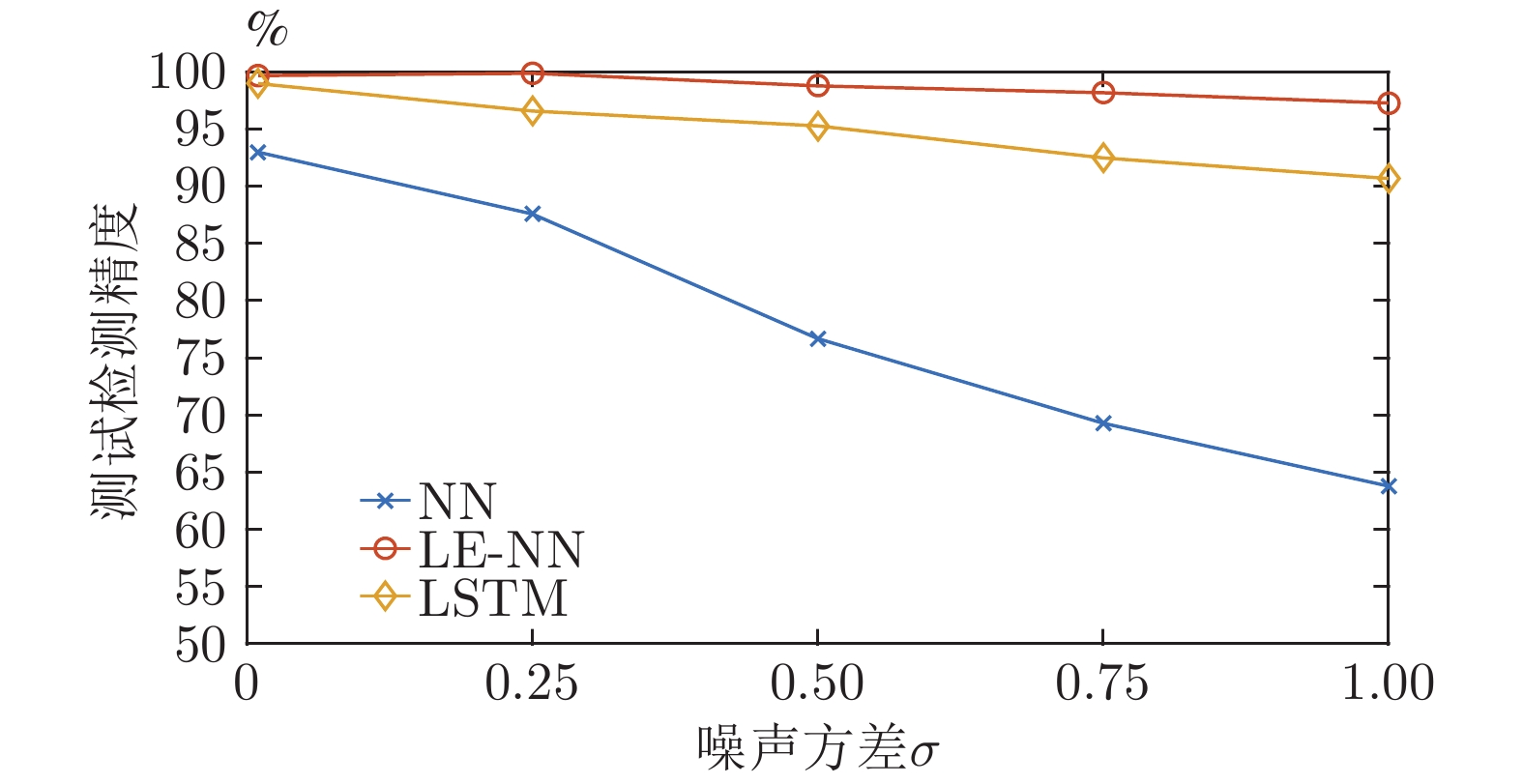
图 12 四种检测方法在不同环境噪声中的检测精度ACC变化
Fig. 12 Detection accuracy of three detection mechanisms in different environmental noises
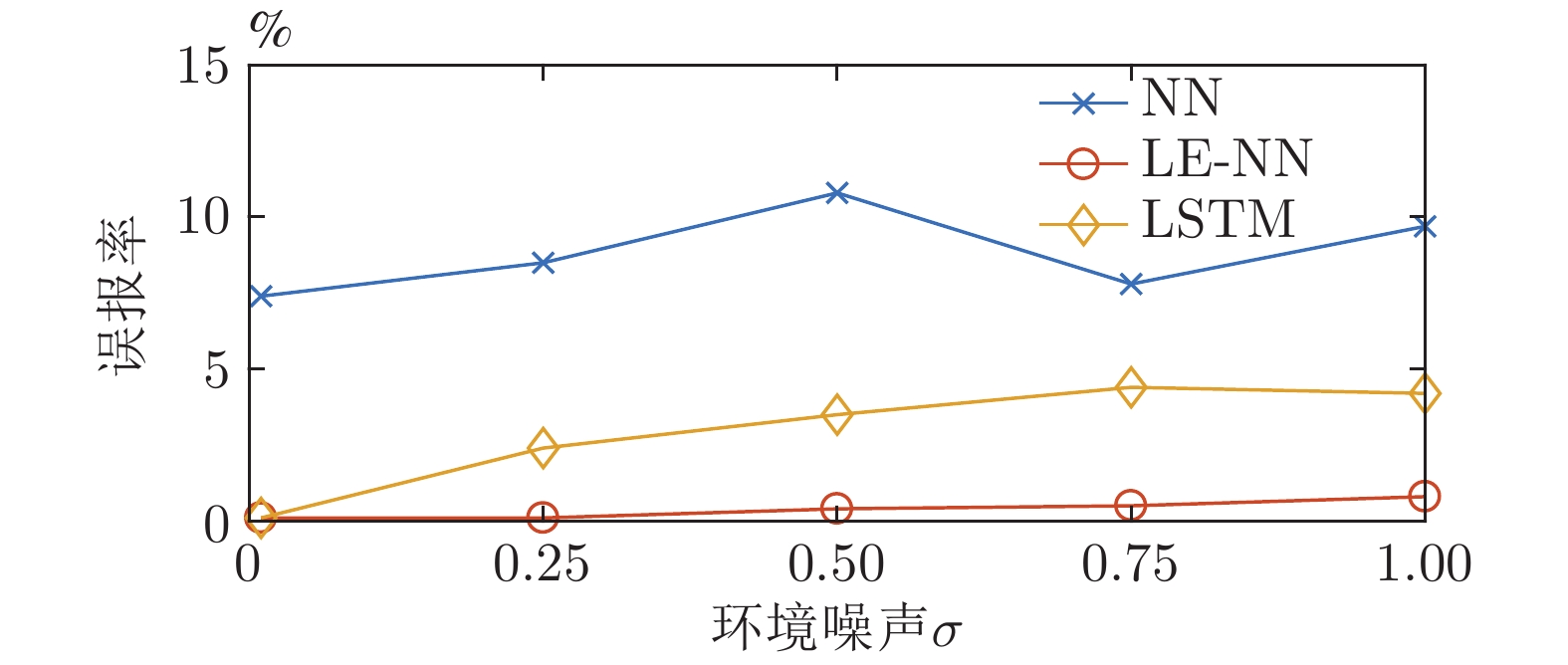
图 13 四种检测方法在不同环境噪声中的误报率FPR变化
Fig. 13 False positive rate of three detection mechanisms in different environmental noises
-
[1] Eklas H, Imtiaj K, Fuad U N, Sarder S S, Samiul H S. Application of big data and machine learning in smart grid, and associated security concerns: A Review. IEEE Access, 2019, 7: 13960−13988 doi: 10.1109/ACCESS.2019.2894819 [2] Liang G Q, Weller S R, Zhao J H, Luo F J, Dong Z Y. The 2015 Ukraine blackout: implications for false data injection attacks. IEEE Transactions on Power Systems, 2017, 32(4): 3317−3318 doi: 10.1109/TPWRS.2016.2631891 [3] 王琦, 邰伟, 汤奕, 倪明. 面向电力信息物理系统的虚假数据注入攻击研究综述. 自动化学报, 2019, 45(1): 72−83Wang Qi, Tai Wei, Tang Yi, Ni Ming. A Review on false data injection attack toward cyber-physical power system. Acta Automatica Sinica, 2019, 45(1): 72−83 [4] Yao L, Peng N, Michael K R. False data injection attacks against state estimation in electric power grids. ACM Transactions on Information and System Security 2011, 14(1): No. 13, 33 pages [5] Kim T T, Poor H V. Strategic protection against data injection attacks on power grids. IEEE Transactions on Smart Grid, 2011, 2(2): 326−333 doi: 10.1109/TSG.2011.2119336 [6] Ansari M H, Vakili V T, Bahrak B, Tavassoli P. Graph theoretical defense mechanisms against false data injection attacks in smart grids. Journal of Modern Power Systems and Clean Energy 2018, 6(5): 860−871 doi: 10.1007/s40565-018-0432-2 [7] Liu L C, Esmalifalak M, Han Z. Detection of false data injection in power grid exploiting low rank and sparsity. International Conference on Communications. Budapest, Hungary: IEEE, 2013. [8] Liang G Q, Zhao J H, Luo F J, Weller S R, Dong Z Y. A review of false data injection attacks against modern power systems. IEEE Transactions on Smart Grid 2017, 8(4): 1630−1638 doi: 10.1109/TSG.2015.2495133 [9] Shan Ke-Meng, Qi Dong-Lian. Distributed dection of false data injection in smart grid and location of error estimation. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: 2017. [10] Ozay M, Esnaola I, Vural F T Y, Kulkarni S R, Poor H V. Machine learning methods for attack detection in the smart grid. IEEE Transactions on Neural Networks and Learing Systems 2015, 27(8): 1773−1786 [11] Esmalifalak M, Liu L C, Nguyen N, Zheng R, Han Z. Detecting stealthy false data injection using machine learning in smart grid. IEEE Systems Journal 2014, 11(3): 1644−1652 [12] He Y B, Mendis G J, Wei J. Real-time detection of false data injection attacks in smart grid: a deep learning-based intelligent mechanism. IEEE Transactions on Smart Grid 2017, 8(5): 2505−2516 doi: 10.1109/TSG.2017.2703842 [13] Yu J Q, Huo Y H, Li V O K. Online false data injection attack detection with wavelet transform and deep neural networks. IEEE Transactions on Industrial Informatics 2018, 14(7): 3271−3280 doi: 10.1109/TII.2018.2825243 [14] Sun Y B, Fu M Y, Wang B C, Zhang H S, Marelli D. Dynamic state estimation for power networks using distributed MAP technique. Automatica 2016, 73: 27−37 doi: 10.1016/j.automatica.2016.06.015 [15] Ali A, Antonio G E. Power System State Estimation: Theory and Implementation. CRC Press, 2004.115−142 [16] Yu Z H, Chin W L. Blind false data injection attack using PCA approximation method in smart grid. IEEE Transactions on Smart Grid 2015, 6(3): 1219−1226 doi: 10.1109/TSG.2014.2382714 [17] Belkin M, Niyogi P. Laplacian eigenmaps for dimensionality reduction and data representation. Neural Computation 2003, 15(6): 1373−1396 doi: 10.1162/089976603321780317 [18] Rumelhart D E, Hinton G E, Williams R J. Learning representations by back-propagating errors. Nature 1986, 323(6088): 533−536 doi: 10.1038/323533a0 [19] Ray D Z, Carlos E M S, Robert J T. MATPOWER: Steadystate operations, planning, and analysis tools for power systems research and education. IEEE Transactions on Power Systems 2011, 26(1): 12−19 doi: 10.1109/TPWRS.2010.2051168 [20] Hochreiter S, Schmidhuber J. Long Short-term Memory. Neural Computation 1997, 9(8): 1735−1780 doi: 10.1162/neco.1997.9.8.1735 -

 下载:
下载:





计量
- 文章访问数: 2749
- HTML全文浏览量: 927
- PDF下载量: 280
- 被引次数: 0
