

A Road Extraction Method for High Resolution Remote Sensing Images
-
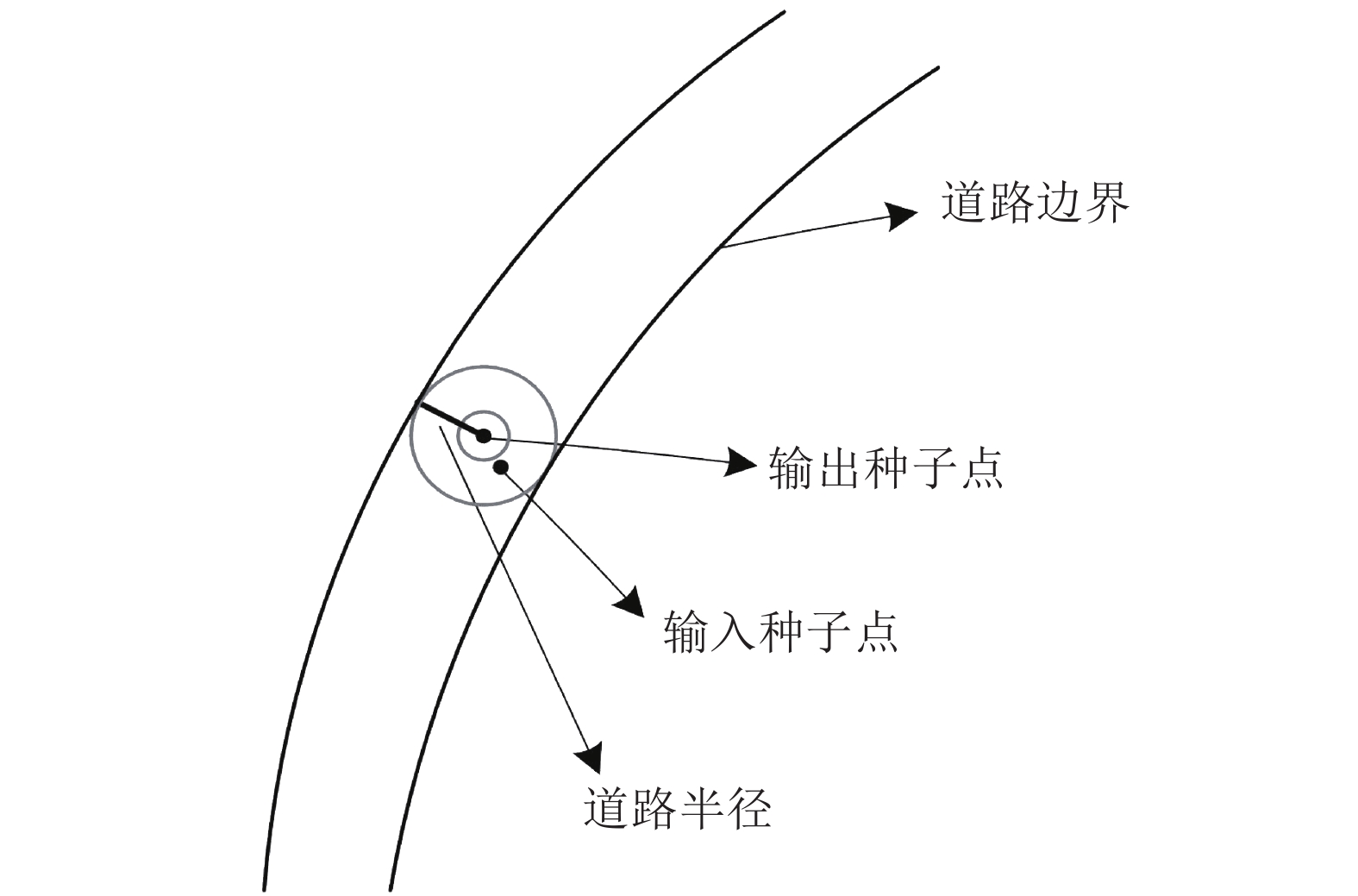
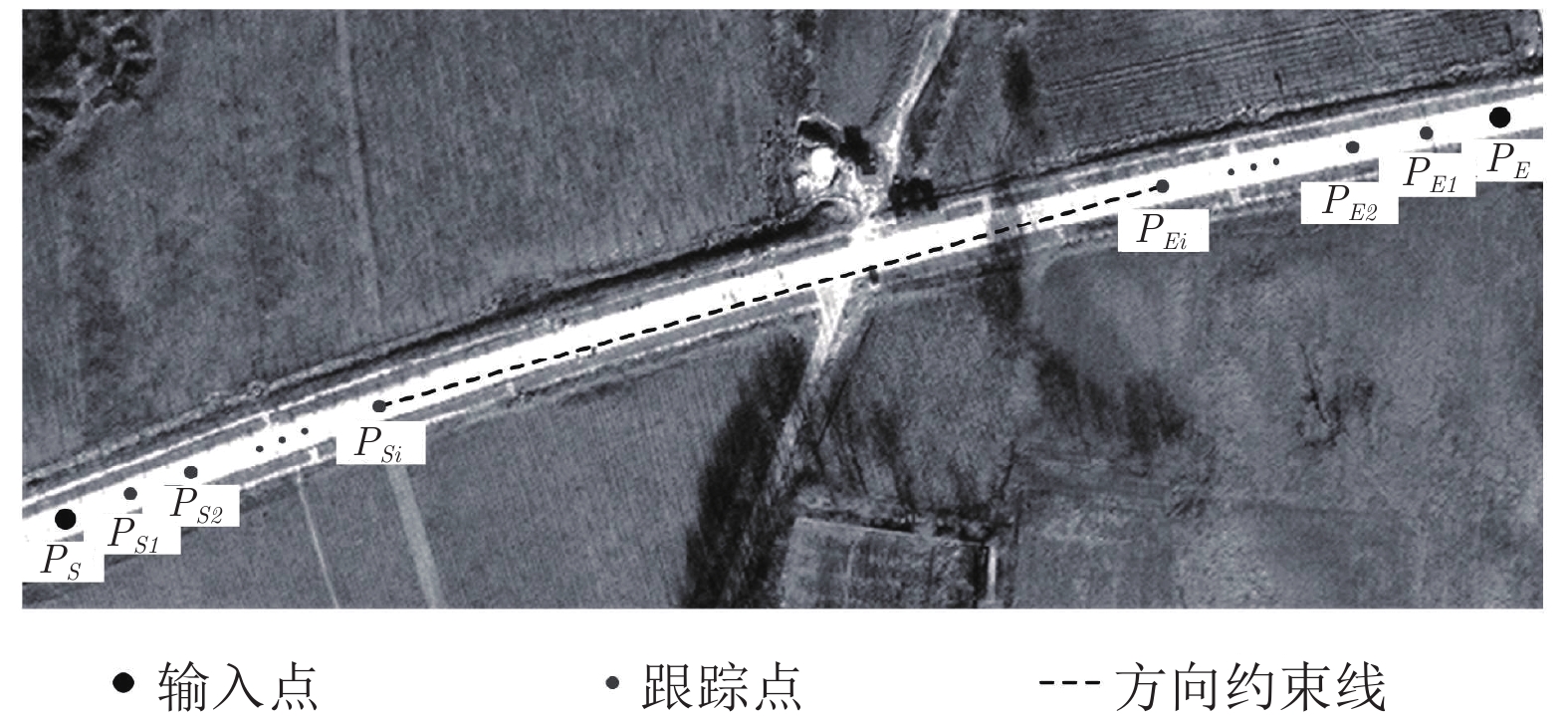
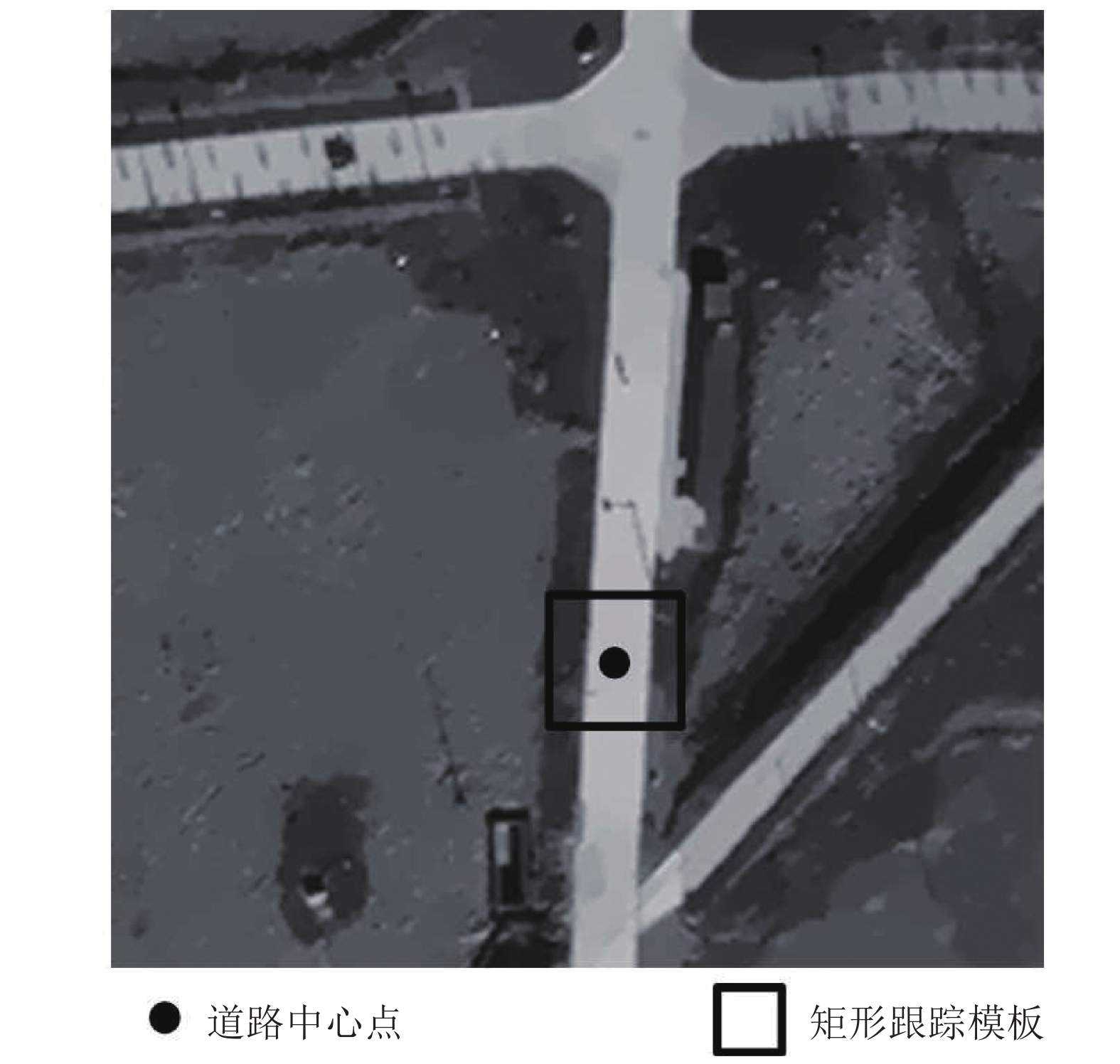
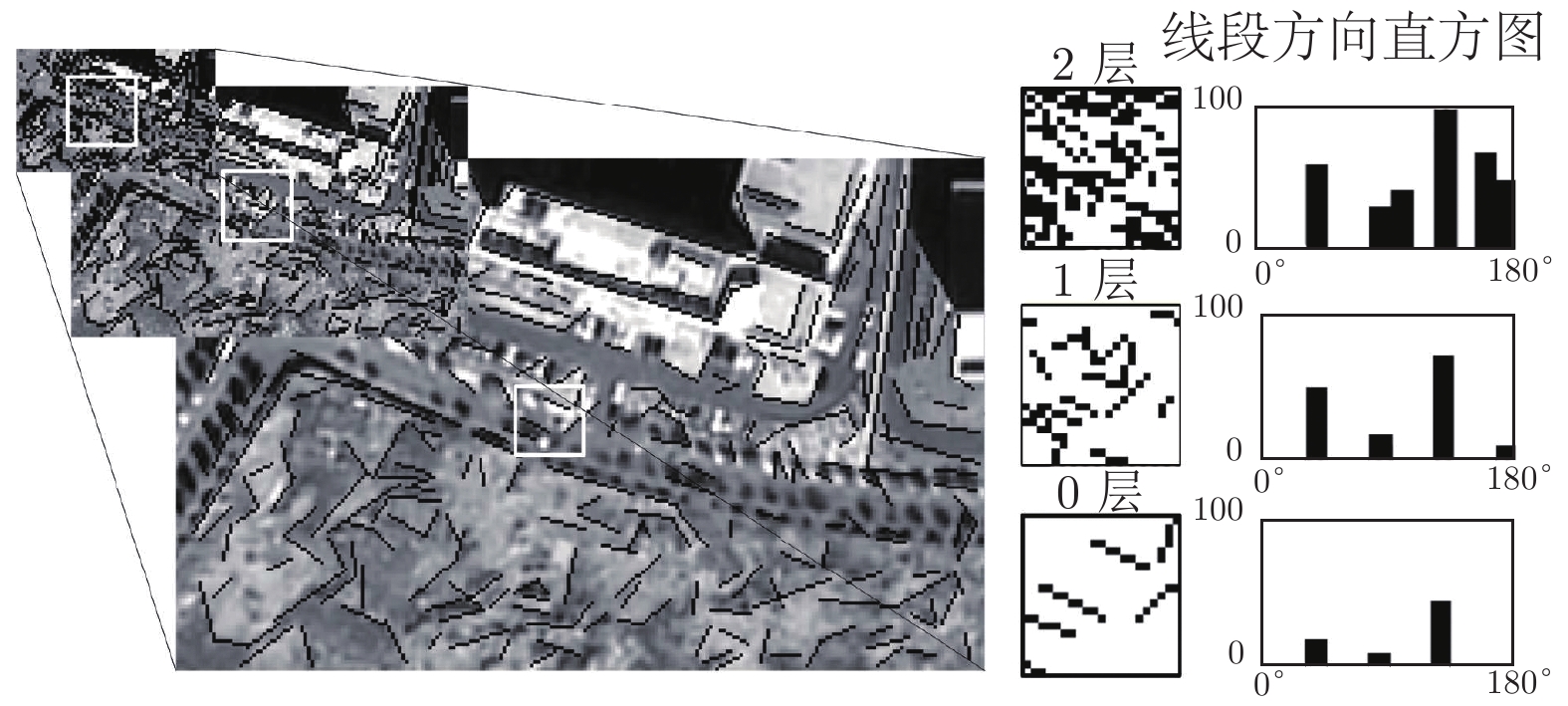
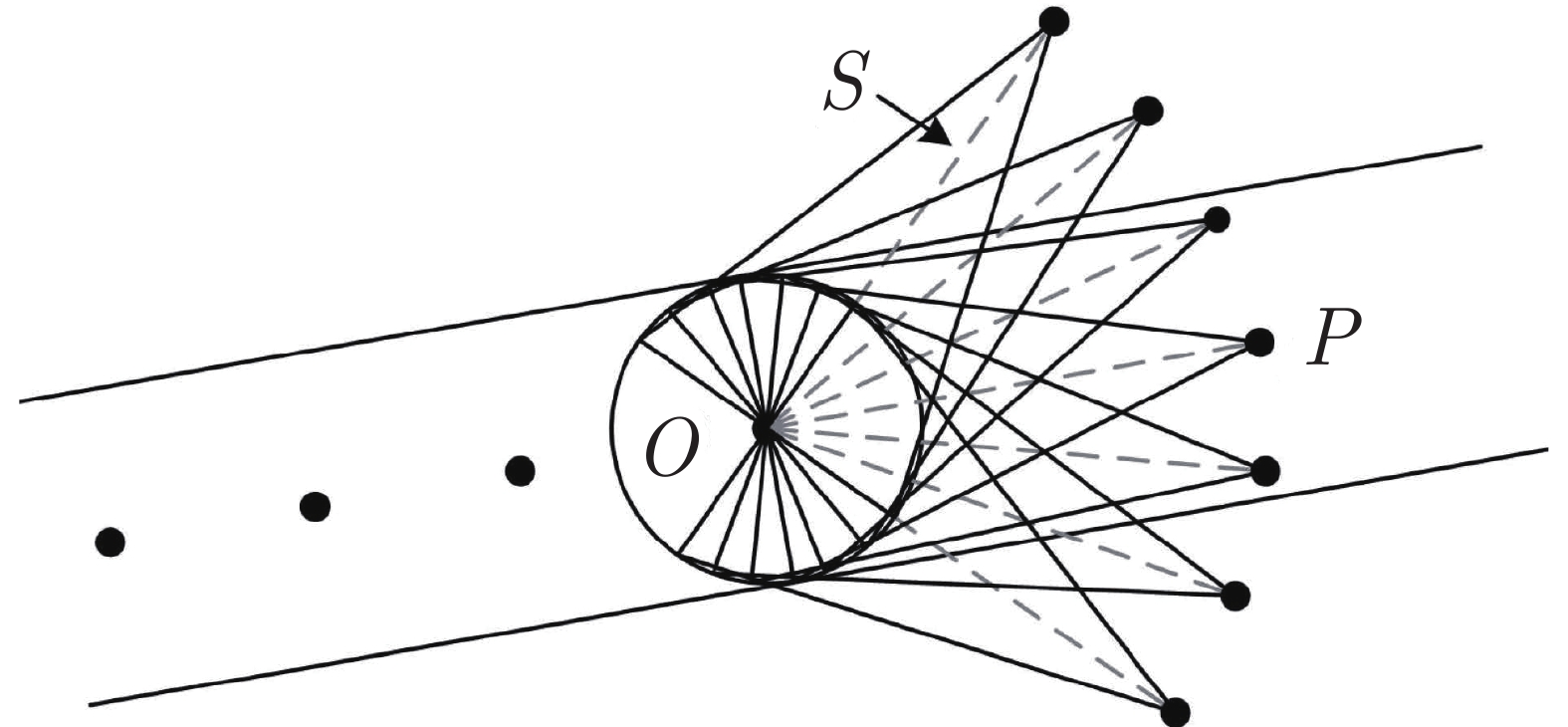
摘要: 针对空间异质性导致的道路几何纹理特征突出性下降问题, 提出一种高分辨率遥感影像道路提取方法. 首先设定跟踪模型, 依据人工输入点, 自适应提取道路中心点和道路宽度, 设计迭代内插、双向迭代两种跟踪方式以及矩形跟踪模板; 然后提出多描述子道路匹配模型, 针对道路几何纹理特征突出性不足问题, 基于道路区域地物边缘与道路方向一致的语义关系, 通过线段峰值约束的思想, 提出一种多尺度线段方向直方图(Multi-scale line segment orientation histogram, MSLSOH)描述子, 以此对跟踪方向进行预测; 针对道路几何纹理特征均质性下降问题, 从道路区域与道路非道路混合区域纹理差异性出发, 组合三角形构成扇形描述子, 突出道路影像纹理特征, 以此不仅可对预测跟踪点进行验证, 而且也可在结构信息缺失的情况下对道路进行跟踪; 最后选取不同类型、不同分辨率、不同场景的高分辨率遥感影像, 通过与其他方法的实验对比, 表明该方法能够解决道路提取过程中几何纹理特征突出性下降问题, 具有准确率高和自动化程度高的优势.Abstract: In order to solve the problem of road geometric texture feature prominence decline caused by spatial heterogeneity, a road extraction method for high resolution remote sensing images is proposed in this paper. This method first sets a tracking model, adaptively extracts road center point and road width according to manual input points, thereby designing two tracking methods (interpolation and bidirectional iteration), and a rectangular tracking template. Secondly, a multi-descriptor road matching model is proposed: Facing with the lack of prominent geometric features of roads, based on the semantic relationship between the edges of the objects in the road area and the direction of the road, a MSLSOH (Multi-scale line segment orientation histogram) descriptor is proposed to predict the matching tracking direction through the idea of line segment peak constraint. And then, for the problem of the homogeneity reduction of road texture features, from the difference of texture between road area and road non-road mixed area, a sector descriptor composed of multiple triangles was designed to highlighting the road image texture features, so that not only the predicted tracking points can be verified, but also tracking roads in the absence of structural information. Finally, high resolution remote sensing images of different types, resolutions and scenes are selected. Compared with other methods, the experimental results show that this method can solve the problem of decreasing the prominence of geometric texture features in the process of road extraction, and has the advantages of high accuracy and high degree of automation.
-
表 1 不同道路提取方法对比
Table 1 Comparison of different methods for road extraction
评价参数 本文方法 Erdas 算法 T 型模板算法 圆型模板算法 实验一 实验二 实验三 实验一 实验二 实验三 实验一 实验二 实验三 实验一 实验二 实验三 完整度 (%) 99.7 99.7 99.6 99.8 99.6 99.7 94.7 99.2 97.4 99.4 99.7 99.1 正确率 (%) 99.5 96.4 99.4 99.6 99.7 99.8 96.4 88.5 99.1 99.5 96.3 98.7 提取质量 (%) 99.2 96.0 99.1 99.4 99.3 99.5 90.8 87.9 96.5 98.9 96.0 97.8 种子点数 (个) 22 6 24 199 62 107 70 34 110 61 13 46 运行时间 (s) 348 102 374 803 259 457 416 152 553 279 116 231  下载: 导出CSV
下载: 导出CSV
-
[1] 曹帆之, 朱述龙, 朱宝山, 李润生, 孟伟灿. 均值漂移与卡尔曼滤波相结合的遥感影像道路中心线追踪算法. 测绘学报, 2016, 45(2): 205−212 doi: 10.11947/j.AGCS.2016.20140610Cao Fan-Zhi, Zhu Shu-Long, Zhu Bao-Shan, Li Run-Sheng, Meng Wei-Can. Tracking road centerlines from remotely sensed imagery using mean shift and Kalman filtering. Acta Geodaetica et Cartographica Sinica, 2016, 45(2): 205−212 doi: 10.11947/j.AGCS.2016.20140610 [2] 戴激光, 杜阳, 方鑫鑫, 王杨, 苗志鹏. 多特征约束的高分辨率光学遥感影像道路提取. 遥感学报, 2018, 22(5): 777−791Dai Ji-Guang, Du Yang, Fang Xin-Xin, Wang Yang, Miao Zhi-Peng. Road extraction method for high resolution optical remote sensing images with multiple feature constraints. Journal of Remote Sensing, 2018, 22(5): 777−791 [3] Vosselman G, De Knecht J. Road tracing by profile matching and kaiman filtering. Automatic Extraction of Man-made Objects from Aerial and Space Images. Basel: Birkhäuser, 1995. 265−274 [4] Blaschke T, Hay G J, Weng Q H, Resch B. Collective sensing: Integrating geospatial technologies to understand urban systems–An overview. Remote Sensing, 2011, 3(8): 1743−1776 doi: 10.3390/rs3081743 [5] Blaschke T, Hay G J, Kelly M, Lang S, Hofmann P, Addink E, et al. Geographic object-based image analysis-towards a new paradigm. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 87: 180−191 doi: 10.1016/j.isprsjprs.2013.09.014 [6] Talbot H, Appleton B. Efficient complete and incomplete path openings and closings. Image and Vision Computing, 2007, 25(4): 416−425 doi: 10.1016/j.imavis.2006.07.021 [7] Schubert H, Van De Gronde J J, Roerdink J B T M. Efficient computation of greyscale path openings. Mathematical Morphology - Theory and Applications, 2016, 1: 189−202 [8] 戴激光, 苗志鹏, 葛连茂, 王晓桐, 朱婷婷. 结合路径形态学的高分遥感影像道路提取方法. 遥感信息, 2019, 34(1): 28−35 doi: 10.3969/j.issn.1000-3177.2019.01.005Dai Ji-Guang, Miao Zhi-Peng, Ge Lian-Mao, Wang Xiao-Tong, Zhu Ting-Ting. Road extraction method based on path morphology for high resolution remote sensing imagery. Remote Sensing Information, 2019, 34(1): 28−35 doi: 10.3969/j.issn.1000-3177.2019.01.005 [9] Hu X Y, Zhang Z X, Zhang J Q. An approach of semiautomated road extraction from aerial image based on template matching and neural network. In: Proceedings of the 19th International Archives of Photogrammetry and Remote Sensing. Amsterdam, Netherlands: Amsterdam University, 2000. 994−999 [10] Leninisha S, Vani K. Water flow based geometric active deformable model for road network. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 102: 140−147 doi: 10.1016/j.isprsjprs.2015.01.013 [11] 孙晨阳, 周廷刚, 陈圣波, 沈敬伟, 王骏飞, 杨桦. 基于矩形模板匹配的线状地物半自动提取方法研究. 西南大学学报(自然科学版), 2015, 37(7): 155−160Sun Chen-Yang, Zhou Ting-Gang, Chen Sheng-Bo, Shen Jing-Wei, Wang Jun-Fei, Yang Hua. Research of a semi-automatic extraction method for linear features based on rectangular template matching. Journal of Southwest University (Natural Science Edition), 2015, 37(7): 155−160 [12] 林祥国, 张继贤, 李海涛, 杨景辉. 基于T型模板匹配半自动提取高分辨率遥感影像带状道路. 武汉大学学报·信息科学版, 2009, 34(3): 293−296Lin Xiang-Guo, Zhang Ji-Xian, Li Hai-Tao, Yang Jing-Hui. Semi-automatic extraction of ribbon road from high resolution remotely sensed imagery by a T-shaped template matching. Geomatics and Information Science of Wuhan University, 2009, 34(3): 293−296 [13] Xu C Y, Prince J L. Gradient vector flow: A new external force for snakes. In: Proceedings of the 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Juan, USA: IEEE, 1997. 66−71 [14] Li C M, Kao C Y, Gore J C, Ding Z H. Minimization of region-scalable fitting energy for image segmentation. IEEE Transactions on Image Processing, 2008, 17(10): 1940−1949 doi: 10.1109/TIP.2008.2002304 [15] 唐伟, 赵书河. 基于GVF和Snake模型的高分辨率遥感图像四元数空间道路提取. 遥感学报, 2011, 15(5): 1040−1052 doi: 10.11834/jrs.2011239Tang Wei, Zhao Shu-He. Road extraction in quaternion space from high spatial resolution remotely sensed images basing on GVF Snake model. Journal of Remote Sensing, 2011, 15(5): 1040−1052 doi: 10.11834/jrs.2011239 [16] Nakaguro Y, Makhanov S S, Dailey M N. Numerical experiments with cooperating multiple quadratic snakes for road extraction. International Journal of Geographical Information Science, 2011, 25(5): 765−783 doi: 10.1080/13658816.2010.498377 [17] Sethian J A. A fast marching level set method for monotonically advancing fronts. Proceedings of the National Academy of Sciences of the United States of America, 1996, 93(4): 1591−1595 doi: 10.1073/pnas.93.4.1591 [18] 吴学文, 徐涵秋. 一种基于水平集方法提取高分辨率遥感影像中主要道路信息的算法. 宇航学报, 2010, 31(5): 1495−1502 doi: 10.3873/j.issn.1000-1328.2010.05.038Wu Xue-Wen, Xu Han-Qiu. Level set method major roads information extract from high-resolution remote-sensing imagery. Journal of Astronautics, 2010, 31(5): 1495−1502 doi: 10.3873/j.issn.1000-1328.2010.05.038 [19] 龚健雅, 季顺平. 摄影测量与深度学习. 测绘学报, 2018, 47(6): 693−704 doi: 10.11947/j.AGCS.2018.20170640Gong Jian-Ya, Ji Shun-Ping. Photogrammetry and deep learning. Acta Geodaetica et Cartographica Sinica, 2018, 47(6): 693−704 doi: 10.11947/j.AGCS.2018.20170640 [20] Alshehhi R, Marpu P R. Hierarchical graph-based segmentation for extracting road networks from high-resolution satellite images. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 126: 245−260 doi: 10.1016/j.isprsjprs.2017.02.008 [21] Cheng G L, Wang Y, Xu S B, Wang H Z, Xiang S M, Pan C H. Automatic road detection and centerline extraction via cascaded end-to-end convolutional neural network. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(6): 3322−3337 doi: 10.1109/TGRS.2017.2669341 [22] Zhang Z X, Liu Q J, Wang Y H. Road extraction by deep residual U-Net. IEEE Geoscience and Remote Sensing Letters, 2018, 15(5): 749−753 doi: 10.1109/LGRS.2018.2802944 [23] 刘如意, 宋建锋, 权义宁, 许鹏飞, 雪晴, 杨云, 等. 一种自动的高分辨率遥感影像道路提取方法. 西安电子科技大学学报(自然科学版), 2017, 44(1): 100−105Liu Ru-Yi, Song Jian-Feng, Quan Yi-Ning, Xu Peng-Fei, Xue Qing, Yang Yun, et al. Automatic road extraction method for high-resolution remote sensing images. Journal of Xidian University, 2017, 44(1): 100−105 [24] Cardim G P, Da Silva E A, Dias M A, Bravo I, Gardel A. Statistical evaluation and analysis of road extraction methodologies using a unique dataset from remote sensing. Remote Sensing, 2018, 10(4): Article No. 620 [25] 戴激光, 张力, 李晋威, 方鑫鑫. 一种链码跟踪与相位验证相结合的直线提取方法. 测绘学报, 2017, 46(2): 218−227 doi: 10.11947/j.AGCS.2017.20160303Dai Ji-Guang, Zhang Li, Li Jin-Wei, Fang Xin-Xin. A line extraction method for chain code tracking with phase verification. Acta Geodaetica et Cartographica Sinica, 2017, 46(2): 218−227 doi: 10.11947/j.AGCS.2017.20160303 [26] 谭仁龙, 万幼川, 袁芳, 李刚. 基于圆形模板的高分辨率遥感影像道路半自动提取. 测绘通报, 2014(10): 63−66Tan Ren-Long, Wan You-Chuan, Yuan Fang, Li Gang. Semi-automatic road extraction of high resolution remote sensing images based on circular template. Bulletin of Surveying and Mapping, 2014(10): 63−66 [27] 胡翔云, 张祖勋, 张剑清. 航空影像上线状地物的半自动提取. 中国图象图形学报, 2002, 7(2): 137−140 doi: 10.3969/j.issn.1006-8961.2002.02.008Hu Xiang-Yun, Zhang Zu-Xun, Zhang Jian-Qing. Semiautomatic extraction of linear object form aerial image. Journal of Image and Graphics, 2002, 7(2): 137−140 doi: 10.3969/j.issn.1006-8961.2002.02.008 [28] Miao Z L, Wang B, Shi W Z, Zhang H. A semi-automatic method for road centerline extraction from VHR images. IEEE Geoscience and Remote Sensing Letters, 2014, 11(11): 1856−1860 doi: 10.1109/LGRS.2014.2312000 [29] Yang Y, Zhu C Q. Extracting road centrelines from high-resolution satellite images using active window line segment matching and improved SSDA. International Journal of Remote Sensing, 2010, 31(9): 2457−2469 doi: 10.1080/01431160903019288 [30] 余洁, 余峰, 张晶, 刘振宇. 结合区域生长与道路基元的高分辨率遥感影像道路提取. 武汉大学学报·信息科学版, 2013, 38(7): 761−764Yu Jie, Yu Feng, Zhang Jing, Liu Zhen-Yu. High resolution remote sensing image road extraction combining region growing and road-unit. Geomatics and Information Science of Wuhan University, 2013, 38(7): 761−764 [31] 连仁包, 王卫星, 李娟. 自适应圆形模板及显著图的高分辨遥感图像道路提取. 测绘学报, 2018, 47(7): 950−958 doi: 10.11947/j.AGCS.2018.20170596Lian Ren-Bao, Wang Wei-Xing, Li Juan. Road extraction from high-resolution remote sensing images based on adaptive circular template and saliency map. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 950−958 doi: 10.11947/j.AGCS.2018.20170596 [32] Wiedemann C, Ebner H. Automatic completion and evaluation of road networks. In: Proceedings of the 19th International Archives of Photogrammetry and Remote Sensing. Amsterdam: ISPRS, 2000. 979−986 -

 下载:
下载:





图(12) / 表(1)
计量
- 文章访问数: 1263
- HTML全文浏览量: 552
- PDF下载量: 265
- 被引次数: 0
