

-
摘要: 云控制系统(Cloud control system, CCS)是云计算与物理系统的融合, 由于云计算中资源是动态的, 因此云计算的加入使得云控制系统具有很大的不确定性. 本文给出一种典型的云控制系统结构, 通过将不确定性划分为云端不确定性和网络端不确定性, 有效简化了云控制系统不确定特性分析和建模. 针对典型的时延不确定性问题, 将云控制系统时延划分为云端时延和网络端时延, 进行了MapReduce模型下多计算节点云端时延分析, 同时进行了云控制结构下网络端时延分析, 两者结合实现了云控制系统的前向通道和反馈通道的时延建模. 基于所建立的云控制系统时延模型, 应用极点配置方法设计了云控制器算法, 包括观测器的设计和控制律的设计, 从而保证了闭环系统的稳定性. 对本文设计的云控制器算法进行了仿真验证, 结果表明考虑时延特性的控制器设计明显提升了云控制系统的控制性能.Abstract: Cloud control system (CCS) is the integration of cloud computing and physical systems. Due to the dynamic resources added, the CCS possesses more uncertainties than other control systems. In this paper, a typical structure of CCS is presented, where the uncertainties are divided into the cloud uncertainty and the network uncertainty, to effectively simply the uncertainty analysis and modeling. Aiming at the typical uncertainty of time-delay, it is divided into the cloud-end time-delay and the network-end time-delay. The first one is carried out under the condition of multi-computing nodes in the MapReduce model, and the second one is also proceeded under the cloud control structure, then the CCS model with the forward channel time-delay and the feedback channel time-delay is realized by superimposing the above mentioned two parties. The controller is then designed based on the established time-delay model using the pole placement method, including the observer and the control law, thus the stability of closed-loop control for CCS is guaranteed. The simulation results show that the control performance of CCS is improved obviously by considering the time-delay characteristics.
-

图 7 云端基于MapReduce任务执行模型
Fig. 7 The task execution model under MapReduce in the cloud-end

图 12 云特性影响控制效果对比图
Fig. 12 The contrast graph of cloud characteristics influencing control effect
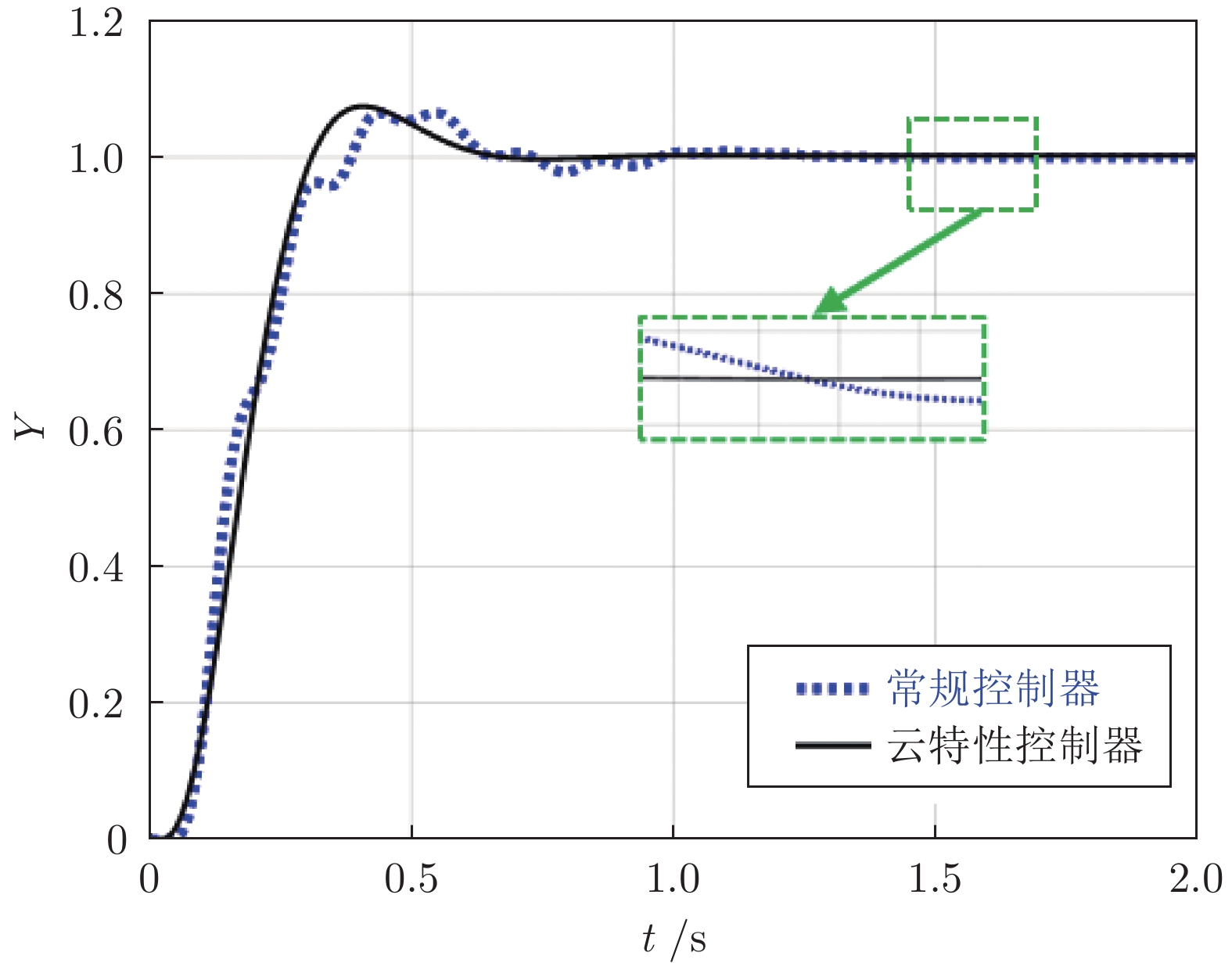
图 13 短时延云特性控制器控制效果对比图
Fig. 13 Contrast graph of control effect of short time-delay cloud characteristic controller
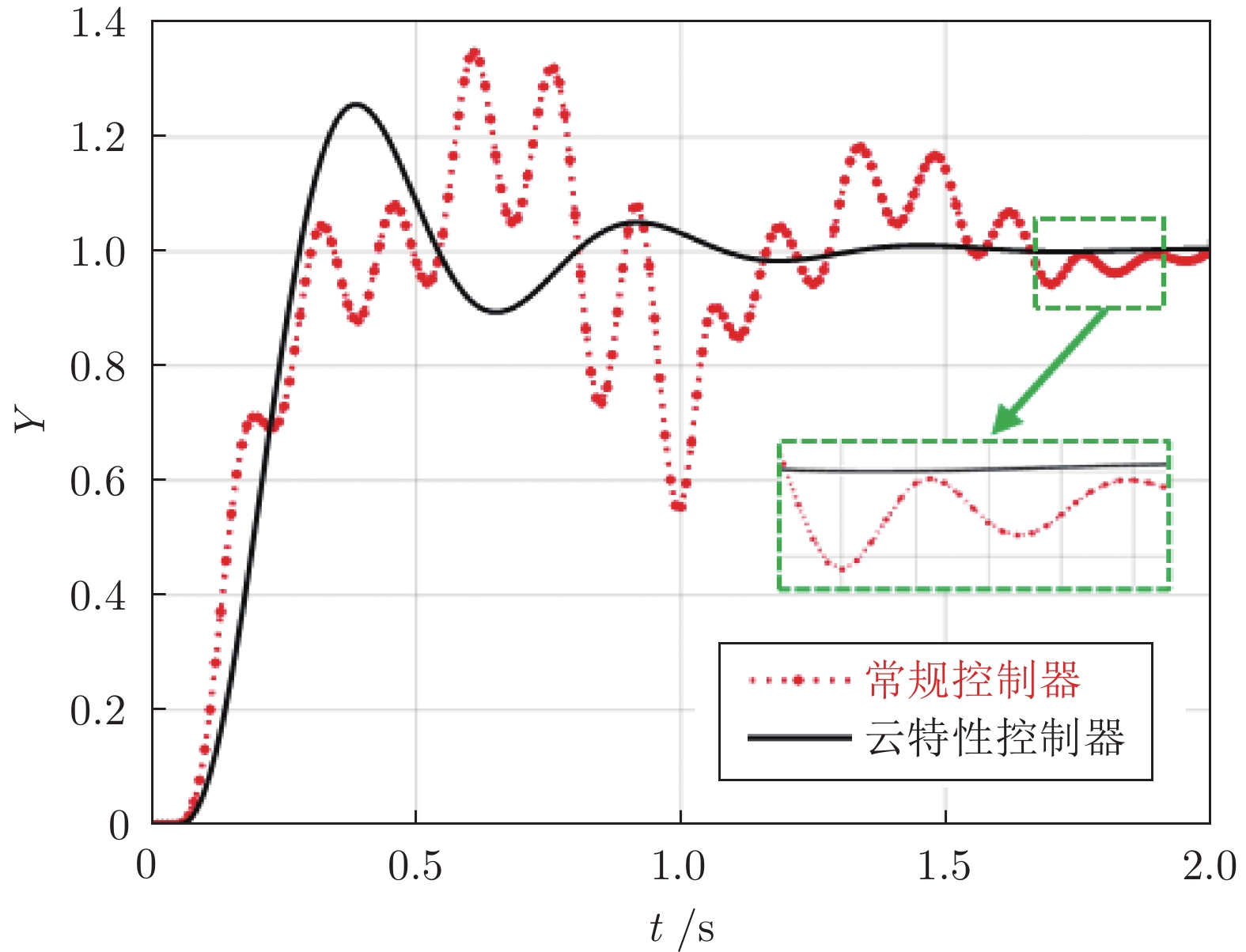
图 14 长时延云特性控制器控制效果对比图
Fig. 14 Contrast graph of control effect of long time-delay cloud characteristic controller
表 1 愿意节点列表
Table 1 The list of willing modes
节点 IP 地址 优先级 排序 $C_{1}$ $Add_{1}$ $S_{1}$ 1 $C_{2}$ $Add_{2}$ $S_{1}$ 2 $\vdots $ $\vdots $ $\vdots $ $\vdots $ $C_{g}$ $Add_{g}$ $S_{g}$ $g$ $\vdots $ $\vdots $ $\vdots $ $\vdots $ $C_{M}$ $Add_{M}$ $S_{M}$ $M$  下载: 导出CSV
下载: 导出CSV
-
[1] 游科友, 谢立华. 网络控制系统的最新研究综述. 自动化学报, 2013, 39(2): 101-118You Ke-you, Xie Li-hua. Survey of Recent Progress in Networked Control Systems. Acta Automatica Sinica, 2013, 39(2): 101-118 [2] Xia Y. From networked control systems to cloud control systems. In: Proceedings of the 2012 Control Conference. Beijing, China: IEEE, 2012. 5878−5883 [3] Schlechtendahl J, Kretschmer F, Sang Z, et al. Extended study of network capability for cloud based control systems. Robotics & Computer Integrated Manufacturing, 2017, 43: 89-95 [4] Chinacloud: The concept and connotation of cloud computing [Online], available: http://www.chinacloud.cn/show.aspxid=14668&cid=17, March 3, 2019 [5] 李伯虎, 柴旭东, 张霖, 林廷宇. 智慧云制造: 工业云的智造模式和手段. 中国工业评论, 2016(2): 58-66Li Bo-hu, Chai Xu-dong, Zhang Lin, Lin Ting-yu. Smart cloud manufacturing: intelligent manufacturing model and means of industrial cloud. China Industry Review, 2016(Z1): 56-66 [6] 罗军舟, 金嘉晖, 宋爱波, 东方. 计算: 体系架构与关键技术. 通信学报, 2011 37(2): 3-21Luo Jun-zhou, Jin Jia-hui, Song Ai-bo, Dong Fang. Cloud computing: architecture and key technologies. Journal on Communications, 2011 37(2): 3-21 [7] Hayes B. Cloud computing. Communications of the ACM, 2008 51(7): 9-11 doi: 10.1145/1364782.1364786 [8] 夏元清. 云控制系统及其面临的挑战. 自动化学报, 2016, 42(1): 1-12Xia Yuan-qing. Cloud Control Systems and Their Challenges. Acta Automatica Sinica, 2016, 42(1): 1-12 [9] Xia Y, Qin Y, Zhai D H, et al. Further results on cloud control systems. Science China Information Sciences, 2016 59(7): 232-236 [10] 夏元清, 闫策, 王笑京, 宋向辉. 智能交通信息物理融合云控制系统. 自动化学报, 2019, 45(01): 132-142Xia Yuan-qing, Yan Ce, Wang Xiao-jing, Song Xiang-hui. Intelligent Transportation Cyber-physical Cloud Control Systems. Acta Automatica Sinica, 2019, 45(01): 132-142 [11] Wu Hai-yan, Lou Lei, Chih-Chung Chen, Sandra Hirche, and Kolja Kühnlenz. Cloud-based networked visual servo control. IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, 2013, 60(2): 554-566 doi: 10.1109/TIE.2012.2186775 [12] Jan Schlechtendahl, Felix Kretschmer, Zhiqian Sang, Armin Lechler, Xun Xu. Extended study of network capability for cloud based control systems. Robotics and Computer-Integrated Manufacturing, 2017, 43: 89-95 doi: 10.1016/j.rcim.2015.10.012 [13] Ding Qing, Cao Si-tan. A Cloud-Based Learning Tool for Graduate Software Engineering Practice Courses With Remote Tutor Support. IEEE Access, 2017, 5: 2262-2271 doi: 10.1109/ACCESS.2017.2664070 [14] Le Xu, Huang Di-jiang. Cloud-Based Virtual Laboratory for Network Security Education. IEEE TRANSACTIONS ON EDUCATION, 2014, 57(3): 145-150 doi: 10.1109/TE.2013.2282285 [15] Ma L, Xia Y Q, Ali Y, Zhan Y F. Engineering problems in initial phase of cloud control system. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: IEEE, 2017. 7892−7896 [16] 王飞跃, 王成红. 基于网络控制的若干基本问题的思考和分析. 自动化学报, 2002, 28(Z): 171-176Wang Fei-yue, Wang Cheng-hong. On Some Basic Issues in Network-Based Direct Control Systems. Acta Automatica Sinica, 2002, 28(Z): 171-176 [17] 王剑平, 张云生, 张果, 张晶. 并行分布控制网络的实时信号时序流图分析. 控制与决策, 2010, 25(11): 1727-1731Wang Jian-ping, Zhang Yun-sheng, Zhang Guo, Zhang Jing. Analysis of signal timing sequence flow chart on parallel and distribute control network. Control and Decision, 2010, 25(11): 1727-1731 [18] 唐晓铭, 邓梨, 虞继敏, 屈洪春. 基于区间二型T-S模糊模型的网络控制系统的输出反馈预测控制. 自动化学报, 2019, 45(3): 604-616Tang Xiao-ming, Deng Li, Yu Ji-min, Qu Hong-chun. Output feedback model predictive control for interval type-2 T-S fuzzy networked control systems. Acta Automatica Sinica, 2019, 45(3): 604-616 [19] Cloosterman M B G, Wouw N V D, Heemels W P M H, et al. Stability of Networked Control Systems With Uncertain Time-Varying Delays. IEEE Transactions on Automatic Control, 2009, 54(7): 1575-1580 doi: 10.1109/TAC.2009.2015543 [20] 王彩璐, 陶跃钢, 杨鹏, 刘作军, 周颖. 云控制系统并行任务分配优化算法与并联控制. 自动化学报,2017, 43(11): 1973-1983Wang Cai-lu, Tao Yue-gang, Yang Peng, Liu Zuo-jun, Zhou Ying. Parallel Task Assignment Optimization Algorithm and Parallel Control for Cloud Control Systems. Acta Automatica Sinica, 2017, 43(11): 1973-1983 [21] M Malekimajd, D Ardagna, M Ciavotta, E Gianniti, M Passacantando, A M Rizzi. An optimization framework for the capacity allocation and admission control of MapReduce jobs in cloud systems. The Journal of Supercomputing, 2018, 74(10): 5314-5348 doi: 10.1007/s11227-018-2426-2 [22] 李建江, 崔健, 王聃, 严林, 黄义双. MapReduce并行编程模型研究综述. 电子学报, 2011, 39(11): 2635-2642Li Jian-jiang, Cui Jian, Wang Dan, Yan Lin,Huang Yi-shuang. Survey of MapReduce Parallel Programming Model. Acta Automatica Sinica, 2011, 39(11): 2635-2642 [23] Xia Yuan-qing. Cloud Control Systems. Acta Automatica Sinica, 2015, 2(02): 134-142 Acta Automatica Sinica doi: 10.1109/JAS.2015.7081652 [24] 关守平, 周玮, 尤富强. 网络控制系统与应用. 北京: 电子工业出版社, 2008. 15−18Guan Shou-Ping, Zhou Wei, You Fu-Qiang. Networked Control Systems and Applications. Beijing: Publishing House of Electronics Industry, 2008. 15−18 -

 下载:
下载:




计量
- 文章访问数: 957
- HTML全文浏览量: 475
- PDF下载量: 290
- 被引次数: 0
