

A Complementary Color Wavelet-based Measure on Color Image Sharpness Assessment for Autofocus
-
摘要: 针对彩色图像的自动聚焦, 本文提出了一种新的清晰度评价测度. 该测度借助于互补色小波变换, 在互补色小波域, 利用融合互补色算子的层级最大能量和层级统计分布扩散度的乘积来描述本文的清晰度. 分析表明: 融合互补色算子, 可提取待评价彩色图像在颜色、亮度、方向、尺度和各通道分量间的相互信息等方面的相关特征. 这样, 其层级的最大能量就反映了这些被提取相关特征中最显著特征的清晰程度, 而其统计分布的扩散度, 就衡量了其清晰度特征分布的离散程度. 那么利用它们来共同表征清晰度的测度, 就使得本文所提的测度能随图像清晰程度的增加而增加. 在LIVE/IVC数据库上与多种经典方法的对比结果表明: 本文提出的测度具有最高的聚焦精度0.0373/0.0246、分辨率1.6132/0.4771和最好的无偏稳定性.Abstract: In this paper, a new measure on color image sharpness assessment for autofocus is proposed. By means of the complementary color wavelet transform (CCWT), the scale maximum energy and statistical distribution variabilities of the fusion complementary color operators in CCWT domain are combined into an image sharpness assessment measure by their product. The analyses show that the complementary color operators can extract the characteristics of the color, brightness, scales, directions and mutual information among the channels in a color image. In this way, the sharpness of the most significant feature in these extracted characteritics is revealed by the scale maximum energy of the complementary color operators. The dispersion degree of the features related to the sharpness of an image is disclosed by the distribution variabilities of the operators. As a result, the proposed measure in this paper can increase with the increase of the image sharpness. The simulation results on the LIVE/IVC database show that the proposed measure is of the highest focusing accuracy 0.0373/0.0246 and resolution 1.6132/0.4771, and the best unbiased stability comparison with the classical methods reported in literature.
-
Key words:
- Sharpness assessment /
- complementary color wavelet /
- color image /
- maximum energy /
- variability
-
在深海勘探开发生产中, 海洋柔性立管作为连接海面作业平台与海床井口的关键构件[1].在风、浪、洋流等外部载荷作用下, 海洋立管会产生振动现象, 而长期的振动则是造成柔性立管疲劳破损的主因[2-4].因此, 开展先进的海洋柔性立管振动主动控制系统研究, 对延长立管使用寿命、提高生产效率和保证海洋油气生产安全具有重要的理论和实际意义.
从数学的观点看, 具有振动的海洋柔性立管系统可认为是典型的无限维分布参数系统[5-11].其动力学往往建模为耦合的偏微分–常微分方程, 这使得现有许多对传统刚性系统成熟的方法不能直接应用.对海洋柔性立管振动控制的研究主要包括模态控制和边界控制.模态控制是基于提取的有限维受控子系统进行控制设计, 而忽略掉的高频模态可能导致系统产生控制溢出效应.边界控制能克服上述方法的缺点, 且容易由系统机械能相关的Lyapunov函数得出, 因此边界控制与其他控制技术如PID控制、鲁棒控制、自适应控制、反步控制、输出反馈控制等相结合的方法广泛应用于柔性立管系统的振动控制领域[12-16].上述研究仅仅局限于柔性立管系统的振动控制, 而这些方法将不适用于具有输入非线性特性的柔性立管系统.
在实际的海洋油气生产环境中, 柔性立管系统除了受到风浪扰动和海洋洋流分布式扰动影响外, 其面临的情况可能会比之前研究的问题更加复杂.如系统固有的物理约束和执行器的约束将使得系统产生死区、饱和、磁滞、反向间隙等不光滑的非线性特性[17-20].而这些不光滑的非线性特性将会限制系统的瞬态性能, 更为甚者, 将会致使系统不稳定.因此, 需要将这些不光滑的非线性约束特性考虑在控制设计中.为了解决海洋柔性立管系统的输入非线性约束问题, 一些学者基于立管原始无限维模型探索了不同的边界控制方法[13, 21-24].文献[13]面向具有系统不确定性、输出约束和输入饱和的海洋立管系统, 基于反推技术研发了障碍边界控制策略以抑制振动、补偿系统不确定性以及处理系统的输入输出限制.文献[21]针对具有执行器输入饱和非线性约束和外部海洋扰动的海洋柔性立管系统, 在顶端构建边界控制器以稳定其在平衡位置的小邻域并利用辅助系统补偿执行器饱和的影响.文献[22]设计了鲁棒自适应控制器用以稳定具有参数不确定性和输入受限的海洋柔性立管系统.文献[23]采用光滑的双曲正切函数、Nussbaum函数和辅助系统设计边界控制器以抑制立管振动并限制控制输入在给定范围内, 该方法解决了文献[21−22]中应用符号函数限制控制输入所带来的震颤问题.文献[24]引入辅助函数和变量设计边界控制器来实现立管的振动减弱并消除混合的死区−饱和非线性约束影响.然而, 这些成果仅仅解决了柔性立管系统执行器输入饱和或输入饱和−死区非线性约束问题, 而对于具有输入反向间隙−饱和非线性约束的柔性立管系统, 上述方法将不能适用.
本文针对执行器非光滑反向间隙−饱和约束特性的深海柔性立管系统(如图 1所示), 首先将反向间隙−饱和约束转换成虚拟的输入饱和约束, 其后引入辅助系统并采用Lyapunov理论, 构建边界控制以抑制柔性立管的振动并消除饱和非线性约束的影响.随后, 证明了闭环系统在Lyapunov意义下的一致有界稳定性.最后, 通过数值仿真, 验证了本文所提出控制能处理非光滑反向间隙−饱和约束非线性影响, 也能有效抑制立管系统振动.
1. 问题描述和预备知识
注1.本文作如下简写: $ (\cdot)(x, t) = (\cdot) $, $ (\cdot)' = \dfrac{\partial(\cdot)}{\partial{x}} $, $ \dot{(\cdot)} $ = $ \dfrac{\partial(\cdot)}{\partial{t}} $.
1.1 立管动力学模型
深海柔性立管系统如图 1所示, 其中$ l $为立管的长度, $ y(z, t) $为立管在位置$ z $时刻$ t $的偏移量, $ f(z, t) $为海洋洋流分布式扰动, $ d(t) $为外部环境扰动, $ u(t) $为边界控制输入.
本研究所考虑立管系统动力学描述如下[1]:
$\begin{split} \rho\ddot{y}(z,&t)-\left\{T[z, y'(z,t)]+\right.\\ & \left.3\psi(z)y'^2(z,t)\right\}y''(z,t)-\\ & \ T'[z, y'(z,t), y''(z,t)]y'(z,t)+c\dot{y}(z,t)-\\ & \ \psi'(z)y'^3(z,t)+ EIy''''(z,t)-\\ & \ f(z,t) = 0,\ \ \ 0<z<l \end{split} \hspace{33pt} $
(1) $ \begin{align} y(0,t) = y'(0,t) = y''(l,t) = 0 \end{align} \hspace{78pt} $
(2) $ \begin{split} m\ddot{y}(l,t)+& T[l, y'(l,t)]y'(l,t)+\psi(l)y'^3(l,t)-u(t)+\\ & d_a\dot{y}(l,t) = EIy'''(l,t)+d(t) \end{split} \hspace{5pt}$
(3) 其中, $ \rho $, $ c $和$ EI $分别为立管的单位长度质量、阻尼系数和弯曲刚度, $ d_a $和$ m $为船的质量和阻尼系数, $ T[z, y'(z, t)] $为立管的时空变化张力, 表示为
$ \begin{align} T[z, y'(z,t)] = T_0(z)+\psi(z)y'^2(z,t) \end{align} $
(4) 其中, $ T_0(z) > 0 $为初始张力, $ \psi(z)\ge 0 $为非线性弹性模量.
执行器输入饱和非线性描述为[25]
$ \begin{align} \varphi(t) = sat(\varrho(t)) = \begin{cases} a , \qquad\quad\ \varrho(t)\ge a \\[2mm] \varrho(t) , \qquad -a < \varrho(t) < a \\[2mm] -a, \qquad\ \ \, \varrho(t)\ -a \end{cases} \end{align} $
(5) 其中, $ a > 0 $为饱和界限.
执行器输入反向间隙非线性描述为[24]
$\begin{array}{l} u(t) = D(\varphi (t)) = \\ \qquad\;\;\;\left\{ {\begin{aligned} &{\varphi (t) - b,\;\qquad \dot \varphi }{ > 0\;\text{且}\;u(t) = \varphi (t) - b}\\ &{\varphi (t) + b,\;\qquad \dot \varphi }{ < 0\;\text{且}\;u(t) = \varphi (t) + b}\\ &{u(t\_), \qquad\quad\;\; \text{其他}}&{} \end{aligned}} \right. \end{array}$
(6) 其中, $ b > 0 $为反向间隙参数.
由输入饱和与反向间隙的表达式(5)和式(6)可知, 系统的非线性特征是相当复杂的, 因此很难直接对其处理.根据文献[25], 可知输入饱和与反向间隙可转换并表示为一个虚拟的输入饱和.因此, 为解决虚拟的输入非线性问题, 我们引入$ D $的右逆$ D^+ $为
$ \begin{align} \varrho(t) = D^+(\tau(t)) = \left\{ \begin{aligned} & \tau(t)+b, \; \; \dot{\tau}(t)>0 \\ & \tau(t)-b, \; \; \dot{\tau}(t)<0 \\ & \varrho(t\_), \; \;\;\;\;\; \dot{\tau}(t) = 0 \end{aligned} \right. \end{align} $
(7) 根据上面的分析和文献[25], 我们可得混合的输入饱和−反向间隙非线性特性可描述为
$ \begin{split} u(t) = & D(sat(D^+(\tau(t)))) = \\ &\left\{ \begin{aligned} & \,a-b, \qquad\;\;\, \tau(t)\ge a-b \\ & \, \tau(t), \qquad\quad\; |\tau(t)|<a-b \\ & -a+b, \quad\;\;\tau(t)\le-a+b \end{aligned} \right. \end{split} $
(8) 由式(8)可知, 我们可将系统的输入饱和−反向间隙非线性视为一个输入饱和来处理.
1.2 预备知识
引理1[26].设$ \chi_1(z, t) $, $ \chi_2(z, t)\in {\bf{R}} $, $ \varphi > 0 $, 其中$ (z, t)\in$ $[0, l]\times[0, +\infty) $, 则
$ \begin{align} \chi_1(z,t)\chi_2(z,t)\le \frac{1}{\varphi}\chi^2_1(z,t)+\varphi\chi^2_2(z,t) \end{align} $
(9) 引理2[26].设$ \chi(z, t)\in {\bf{R}} $为定义在$ (z, t)\in[0, l]\times $ $[0, +\infty) $的函数, 且满足$ \chi(0, t) = 0, \forall t\in[0, +\infty) $, 则
$ \begin{align} \chi^2(z,t) \le l\int^l_0\chi^{{\prime}2}(z,t){\rm{d}}z \end{align} $
(10) 假设1.假定存在常数$ {F} $, $ {D}\in {\bf{R}}^+ $, 使得$\mid f(z, t)\mid \leq $ $ {F, } $ $ \forall{(z, t)}\in{[0, l]\times[0, +\infty), } $ $\mid d(t)\mid \leq {D, } $ $ \forall{t}\in[0, +\infty). $这个假设是合理的, 由于$ f(z, t) $和$ d(t) $是有限能量的, 因此是有界的[21-24].
假设2.假定存在正常数$ \underline{T}_0 $, $ \overline{T}_0 $, $ \underline{\psi}_0 $, $ \overline{\psi}_0 $, 使得$ \underline{T}_0\le T_0(z) \le \overline{T}_0 $, $ \underline{\psi}_0\le \psi(z)\leq \overline{\psi}_0 $.
假设3.对于新的输入饱和表达式(8), 假定存在一个正常数$ \varpi $使得$ |\triangle u|\le \varpi $, 其中, $ \triangle u = u(t)-$ $\tau(t) $.
2. 控制器设计
本节将引入辅助函数和辅助系统用于构建边界控制器以抑制立管振动并消除输入非线性影响.
2.1 边界控制器
首先, 设计辅助系统为
$ \begin{split}\! \dot{\nu}(t) =&\ \frac{1}{m}\left(-k_1\nu(t)-\triangle u+T[l, y'(l,t)]y'(l,t)+ \right. \\ & \left. \psi(l)y'^3(l,t)+d_a\dot{y}(l,t)-EIy'''(l, t)\right) \end{split} $
(11) 其中, $ \nu(t) $为辅助系统的状态变量, $ k_1 $为正常数.
为便于分析闭环立管系统的稳定性, 定义如下辅助变量
$\begin{split} \mu(t) =\;& \dot{y}(l,t)-k_2y'''(l, t)+y'(l,t)+\\ &k_3y'^3(l,t)+\nu(t) \end{split}$
(12) 其中, $ k_2, k_3 $为正常数.
对式(12)求导, 代入式(3)和式(11), 可得
$ \begin{aligned} \dot{\mu}(t) =\;& \frac{1}{m}(\tau(t)+d(t)-mk_2\dot{y}'''(l, t)+m\dot{y}'(l,t)+\\ & 3mk_3y'^2(l,t)\dot{y}'(l,t)-k_1\nu(t)) \end{aligned} $
(13) 根据上述分析, 提出控制律$ \tau(t) $为
$ \begin{aligned} \tau(t) = & -k_4\mu(t)+k_1\nu(t)+mk_2\dot{y}'''(l, t)-m\dot{y}'(l,t) -\\ & \ 3mk_3y'^2(l,t)\dot{y}'(l,t)-{\rm{sgn}}(\mu(t)){D} \end{aligned} $
(14) 其中, $ k_4 $为正常数.
注2.所设计的控制器(14)是由可获得的边界信号组成的, 其中$ y'''(l, t) $、$ y'(l, t) $和$ y(l, t) $分别可由剪切力传感器、倾角计和位移传感器获得.此外, 控制器中这些信号的一阶时间微分信号$ \dot{y}'''(l, t), $ $ \dot{y}'(l, t) $和$ \dot{y}(l, t) $分别可对已获得信号进行后向差分算法得到[21-24].
选取如下Lyapunov函数为
$ Y(t) = {{Y}_{e}}(t)+{{Y}_{f}}(t)+{{Y}_{g}}(t) $
(15) 其中,
$ \begin{align} {{Y}_{e}}(t) = \frac{\varsigma}{2}\rho\int_{0}^{l}{{{{\dot{y}}}^{2}}(z,t){\rm{d}}z} +\frac{\varsigma}{2}\int_{0}^{l}T_0(z){{{ {y}^{\prime2}\left( z,t\right) }}{\rm{d}}z}+\\ \frac{\varsigma}{2}\int_{0}^{l}\psi(z){{{ {y}^{\prime4}\left( z,t\right) }}{\rm{d}}z}+\frac{\varsigma}{2}EI\int_{0}^{l}y^{\prime\prime 2}(z,t){\rm{d}}z \end{align} $
(16) $ \begin{align} {{Y}_{g}}(t) = \frac{\varsigma m}{2}\nu^2(t)+\frac{\varsigma m}{2}\mu^2(t) \end{align} \hspace{78pt}$
(17) $ \begin{align} {{Y}_{f}}(t) = \lambda\rho\int_{0}^{l} z \phi(z){\dot{y} (z,t){y}'(z,t){\rm{d}}z} \end{align} $
(18) 其中, $ \varsigma, \lambda > 0 $.
引理3.选取的Lyapunov函数(16)是一个正定的函数:
$ \begin{split} 0\le\; & \delta_1[Y_e(t)+Y_f(t)]\le Y(t)\le \\ &\delta_2[Y_e(t)+Y_f(t)] \end{split} $
(19) 其中, $ \delta_1 > 0, \; \delta_2 > 1 $.
证明.根据引理1, 式(18)可放缩为
$ \begin{split} \mid Y_g(t)\mid\ \le\ & \frac{\lambda\rho \overline{\phi}l}{2}\int^l_0[\dot{y}^2(z,t)+\\ &\ y^{{\prime}2}(z,t)]{\rm{d}}z \le \delta_0{Y_e(t)} \end{split} $
(20) 其中
$ \begin{align} \delta_0 = \frac{\lambda \rho \overline{\phi}l}{\min\left({\varsigma}\rho, {\varsigma}\underline{T_0}\right)} \end{align} $
(21) 通过恰当地选取$ \varsigma $和$ \beta $得出
$ \begin{align} \delta_1 = 1-\delta_0>0, \;\delta_2 = 1+\beta_0>1 \end{align} $
(22) 式(22)表明$ 0 < \delta < 1 $, 应用式(21)可得
$ \begin{align} {\varsigma}>\frac{\lambda \rho \overline{\phi}l}{\min\left(\rho, \underline{T_0}\right)} \end{align} $
(23) 重排式(20), 有
$ \begin{align} -{\delta}Y_e(t)\le Y_g(t)\le {\delta}Y_e(t) \end{align} $
(24) 将式(22)代入式(24)得出
$ \begin{align} 0\le \delta_1 Y_e(t)\le Y_e(t)+Y_g(t)\leq \delta_2 Y_e(t) \end{align} $
(25) 结合式(15), 有
$ \begin{aligned} 0\le\;& \delta_1[Y_e(t)+Y_f(t)]\le Y(t)\leq\\ &\delta_2[Y_e(t)+Y_f(t)] \end{aligned} $
(26) 其中, $ \delta_1 > 0, \; \delta_2 > 1 $.
引理4.选取Lyapunov函数(16)的导数是有上界的:
$ \begin{align} \dot{Y}(t)\le -\delta Y(t)+\alpha \end{align} $
(27) 其中, $ \delta, \alpha > 0 $.
证明.对式(16)求导, 可得:
$ \begin{align} \dot{Y}(t) = \dot{Y}_e(t)+\dot{Y}_f(t)+\dot{Y}_g(t) \end{align} $
(28) 将式(16)求导, 代入式(1)并应用引理1, 可得
$ \begin{aligned} \dot{Y}_e(t)\leq \; &\frac{\varsigma T_0(l)}{2}\mu^2(t)-\frac{\varsigma T_0(l)}{2}\nu^2(t)-\frac{\varsigma T_0(l)}{2}\dot{y}^2(l,t)-\\& \frac{\varsigma T_0(l)k^2_2}{2}y'''^2(l,t)-\frac{\varsigma T_0(l)}{2}y'^2(l,t)-\\ & \frac{\varsigma T_0(l)k^2_3}{2}y'^6(l,t)+{\varsigma T_0(l)}{k_2}\nu(t){y}'''(l,t)-\\ & ({\varsigma EI}-{\varsigma T_0(l)}{k_2})y'''(l,t)\dot{y}(l,t)-\\ & \varsigma k_3T_0(l)y'^4(l,t)-{\varsigma}(c-{\sigma_1})\int^l_0\dot{y}^2(z, t){\rm{d}}z+\\ & (2\varsigma\psi(l)-{\varsigma k_3T_0(l)})y'^3(l,t)\dot{y}(l,t)+\\ &{\varsigma k_2k_3T_0(l)}{y}'''(l,t)y'^3(l,t)-{\varsigma T_0(l)}\nu(t)\dot{y}(l,t)+\\ &{\varsigma k_2T_0(l)}y'''(l,t){y}'(l,t)-{\varsigma k_3T_0(l)}y'^3(l,t)\nu(t)-\\ &{\varsigma T_0(l)}\nu(t){y}'(l,t)+\frac{\varsigma}{\sigma_1} \int^l_0f^2(z,t){\rm{d}}z \end{aligned} $
(29) 其中, $ \delta_1 > 0 $.
对$ Y_f(t) $求导, 代入式(11)和式(14), 应用引理1, 可得
$ \begin{split} \dot{Y}_g(t)\le& -\varsigma k_4\mu^2(t)-\varsigma \nu(t)\triangle u-\varsigma k_1\nu^2(t)+\\& \varsigma T_0(l)\nu(t)y'(l,t)-\varsigma EI \nu(t)y'''(l, t)+\\& 2\varsigma \psi(l)\nu(t)y'^3(l,t)+\varsigma d_a \nu(t)\dot{y}(l,t) \end{split} $
(30) 对$ Y_g(t) $求微分, 代入式(4)并利用引理1, 有
$ \begin{aligned} \dot{Y}_f(t)\le & -l\lambda EI\phi(l) y'''(l,t){y}'(l,t)+\frac{\lambda \rho l\phi(l)}{2}\dot{y}^2(l,t)-\\ &\frac{3\lambda EI}{2}\int^l_0(\phi(z)+z\phi'(z)){y}^{{\prime\prime}2}(z, t){\rm{d}}z-\\ &\left[\frac{\lambda \rho}{2}(\phi(z)+z\phi'(z))-\frac{l\lambda c}{\sigma_2}\right]\int^l_0\dot{y}^2(z, t){\rm{d}}z-\\ &\bigg[\frac{\lambda }{2}(\phi(z)T_0(z)+z\phi'(z)T_0(z)-z\phi(z)T_0'(z))-\\ & {\lambda\sigma_2cl\phi^2(z)}-{\lambda\sigma_3l\phi^2(z)}\bigg]\int^l_0{y}^{{\prime}2}(z, t){\rm{d}}z-\\ & \frac{\lambda }{2}\int^l_0[3\phi(z)\psi'(z)+3z\phi'(z)\psi(z)-\\ &z\phi(z)\psi'(z)]{y}^{{\prime}4}(z, t){\rm{d}}z+\frac{3\lambda \phi(l)\psi(l)l}{2}y'^4(l,t)+\\ & \frac{l\lambda}{\sigma_3} \int^l_0f^2(x,t){\rm{d}}x+\frac{\lambda \phi(l)T_0(l) l}{2}y'^2(l,t) \end{aligned} $
(31) 其中, $ \sigma_2, \sigma_3 > 0 $.
将式(29)和式(30)代入式(28), 应用引理1, 可得
$ \begin{aligned} \dot{Y}(t)\le\;& -\varsigma\left( k_1+\frac{ T_0(l)}{2}-\frac{1}{\sigma_4}-\frac{|T_0(l)k_2-EI|}{2\sigma_5}-\right.\\ &\left.\frac{|T_0(l)-d_a|}{2\sigma_6}-\frac{| k_3T_0(l)-2 \psi(l)|\sigma_9}{2}\right)\nu^2(t)-\\ & \frac{3\lambda EI}{2}\int^l_0(\phi(z)+z\phi'(z)){y}^{{\prime\prime}2}(z, t){\rm{d}}z +\\ &{\varsigma}{\sigma_4}\triangle u^2-\varsigma\left( k_4-\frac{ T_0(l)}{2}\right)\mu^2(t)-\left(\frac{\varsigma T_0(l)}{2}-\right.\\ &\left.\frac{{|\varsigma T_0(l)k_2-l\lambda{EI}\phi(l)|}{\sigma_8}}{2}-\frac{\lambda \phi(l)T_0(l) l}{2}\right)\times\\ &y'^2(l,t)-\left(\varsigma k_3T_0(l)-\frac{3\lambda \phi(l)\psi(l)l}{2}\right)y'^4(l,t)-\\ &\left(\frac{\varsigma T_0(l)}{2}-\right.\frac{{\varsigma|T_0(l)-d_a|}{\sigma_6}}{2}-\\ &\left.\frac{{\varsigma|T_0(l)k_2-EI|}{\sigma_7}}{2}-\frac{{\varsigma|k_3T_0(l)-2\psi(l)|}{\sigma_{10}}}{2}-\right.\\ &\left.\frac{\lambda \rho l\phi(l)}{2}\right)\dot{y}^2(l,t)-\varsigma\left(\frac{ T_0(l)k^2_3}{2}-\right.\\ &\left.\frac{| k_3T_0(l)-2 \psi(l)|}{2\sigma_9}-\frac{ k_2k_3T_0(l)}{2\sigma_{11}}-\right.\\ &\left.\frac{|k_3T_0(l)-2\psi(l)|}{2\sigma_{10}}\right)y'^6(l,t)-\left(\frac{\varsigma T_0(l)}{2}-\right.\\ &\left.\frac{{\varsigma|T_0(l)k_2-EI|}{\sigma_5}}{2}-\frac{{\varsigma|T_0(l)k_2-EI|}}{2{\sigma_7}}-\right.\\ &\left.\frac{{|\varsigma T_0(l)k_2-l\lambda{EI}\phi(l)|}}{2{\sigma_8}}-\frac{\varsigma k_2k_3T_0(l)\sigma_{11}}{2}\right)\times\\ &\left.y'''^2(l,t)-\left[\frac{\lambda }{2}(\phi(z)T_0(z)+z\phi'(z)T_0(z)-\right.\right.\\ &\left.z\phi(z)T_0'(z))-\right.{\lambda\sigma_2cl\phi^2(z)}-{\lambda\sigma_3l\phi^2(z)}\bigg]\\ &\left.\int^l_0{y}^{{\prime}2}(z, t){\rm{d}}z+\left(\frac{\varsigma}{\sigma_1}+\frac{l\lambda}{\sigma_3}\right)\int^l_0f^2(z,t){\rm{d}}z-\right.\\ &\left.\bigg({\varsigma}c-{\varsigma}{\sigma_1}+\frac{\lambda \rho}{2}(\phi(z)+z\phi'(z))-\frac{l\lambda c}{\sigma_2}\right)\times\\ &\int^l_0\dot{y}^2(z, t){\rm{d}}z-\frac{\lambda }{2}\int^l_0[3\phi(z)\psi'(z)+\\ &3z\phi'(z)\psi(z)-z\phi(z)\psi'(z)]{y}^{{\prime}4}(z, t){\rm{d}}z \end{aligned} $
(32) 其中, $ \sigma_4\sim\sigma_{11} > 0, $选择恰当的参数值$ \varsigma, $ $ \lambda, $ $ k_i, $ $ i = 1, $ $\cdots, 4, \delta_j, j = 1, \cdots, 11, $满足下列条件:
$ \begin{split} \frac{\varsigma T_0(l)}{2}-\;&\frac{{|\varsigma T_0(l)k_2-l\lambda{EI}\phi(l)|}{\sigma_8}}{2}-\\ &\frac{\lambda \phi(l)T_0(l) l}{2}\ge 0 \end{split} \hspace{51pt}$
(33) $ \begin{split} \frac{\varsigma T_0(l)}{2}-\;&\frac{{\varsigma|T_0(l)-d_a|}{\sigma_6}}{2}-\frac{{\varsigma|T_0(l)k_2-EI|}{\sigma_7}}{2}-\\ &\frac{{\varsigma|k_3T_0(l)-2\psi(l)|}{\sigma_{10}}}{2}-\frac{\lambda \rho l\phi(l)}{2}\ge 0 \end{split} \hspace{20pt}$
(34) $ \begin{split} \frac{\varsigma T_0(l)}{2}-\;&\frac{{\varsigma|T_0(l)k_2-EI|}{\sigma_5}}{2}-\frac{{\varsigma|T_0(l)k_2-EI|}}{2{\sigma_7}}-\\ &\frac{{|\varsigma T_0(l)k_2-l\lambda{EI}\phi(l)|}}{2{\sigma_8}}-\frac{\varsigma k_2k_3T_0(l)\sigma_{11}}{2}\ge 0 \end{split} $
(35) $ \begin{split} \frac{ T_0(l)k^2_3}{2}-\;&\frac{| k_3T_0(l)-2 \psi(l)|}{2\sigma_9}-\\ &\frac{|k_3T_0(l)-2\psi(l)|}{2\sigma_{10}}-\frac{ k_2k_3T_0(l)}{2\sigma_{11}}\ge 0 \end{split} \hspace{11pt}$
(36) $ \begin{align} \varsigma k_3T_0(l)-\frac{3\lambda \phi(l)\psi(l)l}{2}\ge 0 \end{align} \hspace{86pt}$
(37) $ \begin{split} \omega_1 =& \min\{ {\varsigma}c-{\varsigma}{\sigma_1}-\frac{l\lambda c}{\sigma_2}+ \\& \frac{\lambda \rho}{2}(\phi(z)+z\phi'(z))\}>0 \end{split} \hspace{78pt}$
(38) $ \begin{aligned} \omega_2 = &\min\bigg\{\frac{\lambda}{2}(\phi(z)T_0(z)+z\phi'(z)T_0(z)-\\& z\phi(z)T_0'(z))-\lambda\sigma_2cl\phi^2(z)-\lambda\sigma_3l\phi^2(z) \bigg\}>0 \end{aligned} $
(39) $ \begin{split} \omega_3 = &\min\{3\phi(z)\psi'(z)+3z\phi'(z)\psi(z)-\\ &z\phi(z)\psi'(z)\} >0 \end{split} \hspace{32pt}$
(40) $ \begin{align} \omega_4 = \min\{\phi(z)+z\phi'(z)\} >0 \end{align}\hspace{67pt} $
(41) $ \begin{split} \omega_5 =\;& k_1+\frac{ T_0(l)}{2}-\frac{1}{\sigma_4}-\frac{| k_3T_0(l)-2 \psi(l)|\sigma_9}{2}-\\ &\frac{|T_0(l)k_2-EI|}{2\sigma_5}-\frac{|T_0(l)-d_a|}{2\sigma_6}>0 \end{split} $
(42) $ \begin{align} \omega_6 = k_4-\frac{ T_0(l)}{2} >0 \end{align} \hspace{105pt}$
(43) $ \begin{align} \alpha = \left(\frac{\varsigma}{\sigma_1}+\frac{l\lambda}{\sigma_3}\right)lF^2+{\varsigma}{\sigma_4}\varpi^2<+\infty \end{align} \hspace{33pt}$
(44) 结合式(33) ~(44), 可得
$ \begin{aligned} \dot{Y}(t) \le & \ \alpha-\omega_1\int^l_0\dot{y}^2(z, t){\rm{d}}z-\omega_2\int^l_0{y}^{{\prime}2}(z, t){\rm{d}}z-\\ & \frac{\lambda }{2}\omega_3\int^l_0{y}^{{\prime}4}(z, t){\rm{d}}z-\frac{3\lambda EI}{2}\omega_4\int^l_0{y}^{{\prime\prime}2}(z, t){\rm{d}}z-\\& \ \varsigma\omega_5\nu^2(t)-\varsigma\omega_6\mu^2(t)\le\\ & \ \delta_3[Y_e(t)+Y_f(t)]+\alpha \end{aligned} $
(45) 其中, $ \delta_3 = {\min}\left(\dfrac{2\omega_1}{{\varsigma}\rho}, \dfrac{2\omega_2}{{\varsigma}\overline{T}_0}, \dfrac{\lambda\omega_3}{\varsigma\overline{\psi}}, \dfrac{3\lambda\pi_4}{\varsigma}, \dfrac{2\pi_5}{m}, \dfrac{2\pi_6}{m}\right) $.
根据式(26)和式(45), 有
$ \begin{align} \dot{Y}(t)\le -\delta{Y}(t)+\alpha \end{align} $
(46) 其中, $ \delta = \delta_3/\delta_2 $.
定理1.针对执行器非光滑反向间隙−饱和约束特性的深海柔性立管系统, 如果系统初始条件是有界的且所选取参数满足约束条件式(33) ~(44), 在设计控制器(14)、假设1和假设2作用下, 闭环系统是一致有界稳定的.
证明.将式(27)乘以$ {\rm{e}}^{{\vartheta}t} $, 得出:
$ \begin{align} \frac{\partial}{\partial t}\left({Y}(t){\rm{e}}^{\delta t}\right)\le \alpha {\rm{e}}^{\delta t} \end{align} $
(47) 积分上式并变换, 有:
$ \begin{align} {Y}(t)\le Y(0){\rm{e}}^{-\delta t}+\frac{\alpha}{\delta}\left(1-{\rm{e}}^{-\delta t}\right)\le Y(0){\rm{e}}^{-\delta t}+\frac{\alpha}{\delta} \end{align} $
(48) 求助于$ Y_{e}(t) $, 式(19)和引理2, 可得
$ \begin{split} \frac{{\varsigma}\underline{T}_0}{2l}y^2(z,t)\le &\frac{{\varsigma}}{2}\int^l_0T_0(z){y}^{{\prime}2}(z,t){\rm{d}}z\le\\ &{Y_e(t)}\le\frac{1}{\delta_1}Y(t) \end{split} $
(49) 将式(48)代入式(49), 产生
$ \begin{split} \mid y(z,t)\mid \le \sqrt{\frac{2l}{{\varsigma}\delta_1\underline{T}_0}\left[Y(0){\rm{e}}^{-\delta t} +\frac{\alpha}{\delta}\right]}, \\ \forall (z,t) \in[0,l]\times[0,+\infty) \end{split} $
(50) 进一步得出
$ \begin{split} \underset{t\to\infty}{\mathop{\lim }} \,\left| y(z,t) \right| \le\sqrt{\frac{2l\alpha}{\varsigma{\underline{T}_0}{\delta}_{1}\delta}}, \ \ \ \forall z\in[0,l] \end{split} $
(51) 3. 数值仿真
为验证所设计控制器的性能, 本节在MATLAB软件中采用有限差分法[27-30]来近似闭环系统的数值解.柔性立管系统的参数为$ l = 1\; 000\, \rm{m}, $ $ \rho = 500\, \rm{kg/m}, $ $ c = 1.0\, \rm{Ns/m^2}, $ $ T_0(z) = 4.5\times10^5\times(1\; 000+z)\, \rm{N}, $ $\psi(z)=$ $ 1\times10^3 (1\; 000+z), $ $ EI $ = $ 1.5\times10^7\, {\rm N m^2}, ~{m}$ $=9.6\times10^6\, \rm{kg}, $ $ d_a = 1\; 000\, \rm{Ns/m}. $系统的初始条件描述为: $ y(z, 0) =$ $ \dfrac{12z}{l}, ~ \dot{y}(z, 0) = 0 $.
外部环境扰动$ d(t) $为
$ \begin{split} d(t) =\;& [3+0.8\sin(0.7t)+0.8\sin(0.5t)+\\& 0.8\sin(0.9t)]\times10^5 \end{split} $
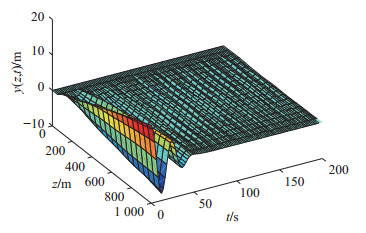
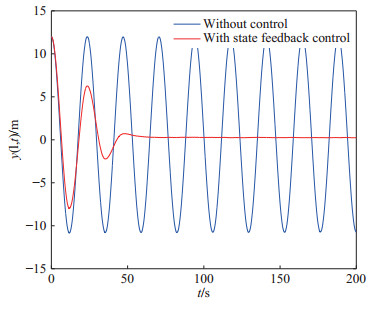
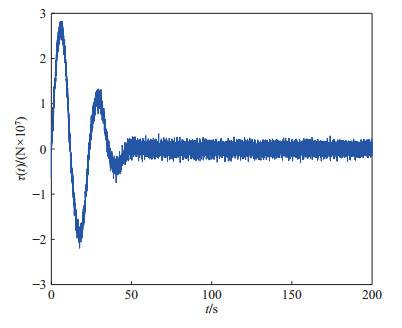
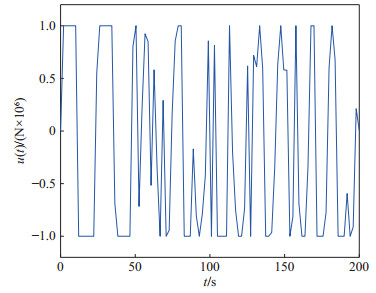
(52) 柔性立管系统在自由振动时, 即$ u(t) = 0 $, 图 2给出了其时空的表示.在所示设计控制器(14)作用下, 选取控制设计参数$ k_1 $ = $ 1\times10^7 $, $ k_2 = {1}/{60}, $ $ k_3= {1}/{225}, $ $ k_4 $ = $ 5\times10^8, $ $ a $ = $ 1\times10^6 $, $ b = 5~\times $ $10^6 $, 立管三维响应显示在图 3中. 图 4则给出了立管中部顶端$ (x = 1\; 000\; {\rm{m}}) $的二维偏移图, 图 5和图 6分别描绘了所设计的控制命令和反向间隙−饱和控制输入.
仿真图 2和图 3表明, 在外部扰动和执行器非光滑反向间隙−饱和约束条件下, 所设计控制器(14)能有效抑制立管振动; 由仿真图 4可得, 立管端点的偏移量稳定在平衡位置附近的小邻域; 仿真图 5和图 6得出, 控制器的输入是非线性的, 执行器非光滑反向间隙−饱和约束特性也相当地明显.根据上述分析, 可得如下结论:由于混合的输入非线性影响, 立管的振动偏移量需要相对长的收敛时间; 本文所构建的控制策略能较好地处理执行器非光滑反向间隙−饱和约束并能有效地抑制立管振动.
4. 结论
本文解决了具有执行器非光滑反向间隙−饱和约束特性的深海柔性立管边界控制问题.首先, 基于Lyapunov理论和边界控制技术, 采用辅助系统和函数在立管顶端构建了边界控制器以实现立管系统的振动抑制和输入非线性的补偿.其后, 应用严格的分析且没有离散化或简化系统的偏微分方程动力学, 证明了受控系统的一致有界性.最后所呈现的仿真结果验证了提出控制能较好地稳定立管系统并有效消除执行器非光滑反向间隙−饱和约束影响.下一步值得探索的研究方向可以为海洋柔性立管系统的有限时间稳定[31]以及基于不确定性和干扰估计[32]的控制设计.
-
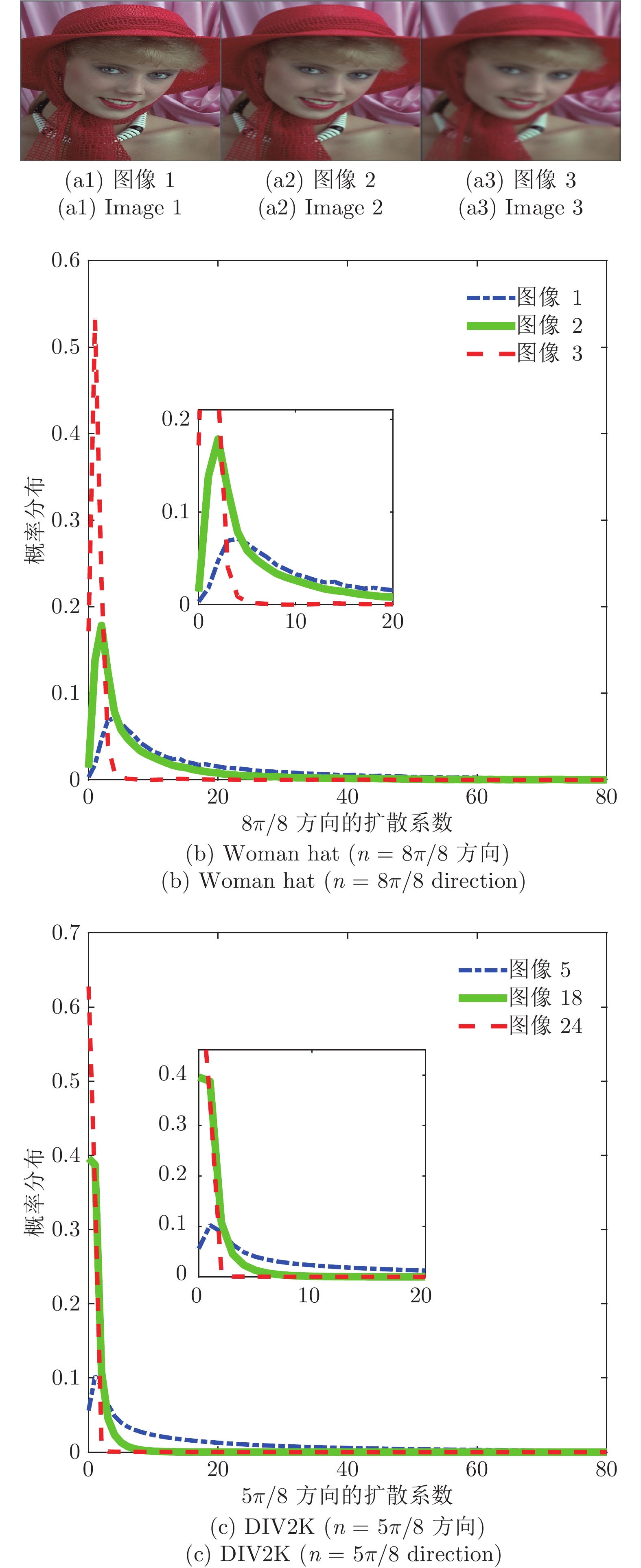
图 6 层级1的方向子带的统计分布情况
Fig. 6 Statistical distribution of directional subbands in level 1

图 3 彩色图像在第2层级的(互补色)小波处理结果
Fig. 3 Color image processing in level 2 using (Complementary color) wavelet transform

图 4 MCCWT测度构建流程图(
$j = 1,2$ 表示互补色小波分解的层级;$n = k\pi /8,k = 1,2,\cdots,8$ 表示每一层级的8个子带的方向)Fig. 4 Modeling flow of MCCWT measure (
$j = 1,2$ presents the decomposition level of the complementary color wavelet;$n = k\pi /8,k = 1,2,\cdots,8$ represents the subbands directions in each level)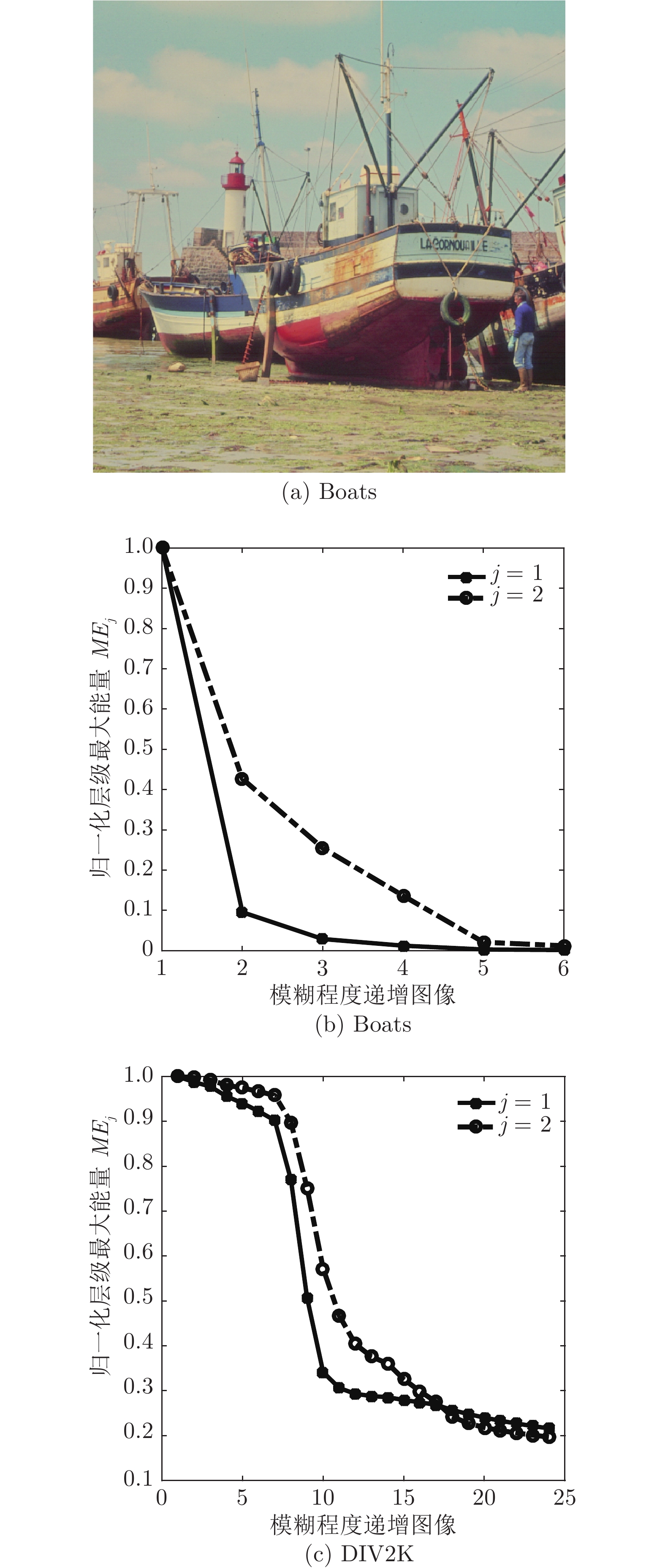
图 5 层级最大能量随模糊递增的变化趋势(实线为层级1, 虚线为层级2)
Fig. 5 The change trend of the scale maximum energy with the increasing blur of color image (Solid line is level 1, dotted line is level 2)
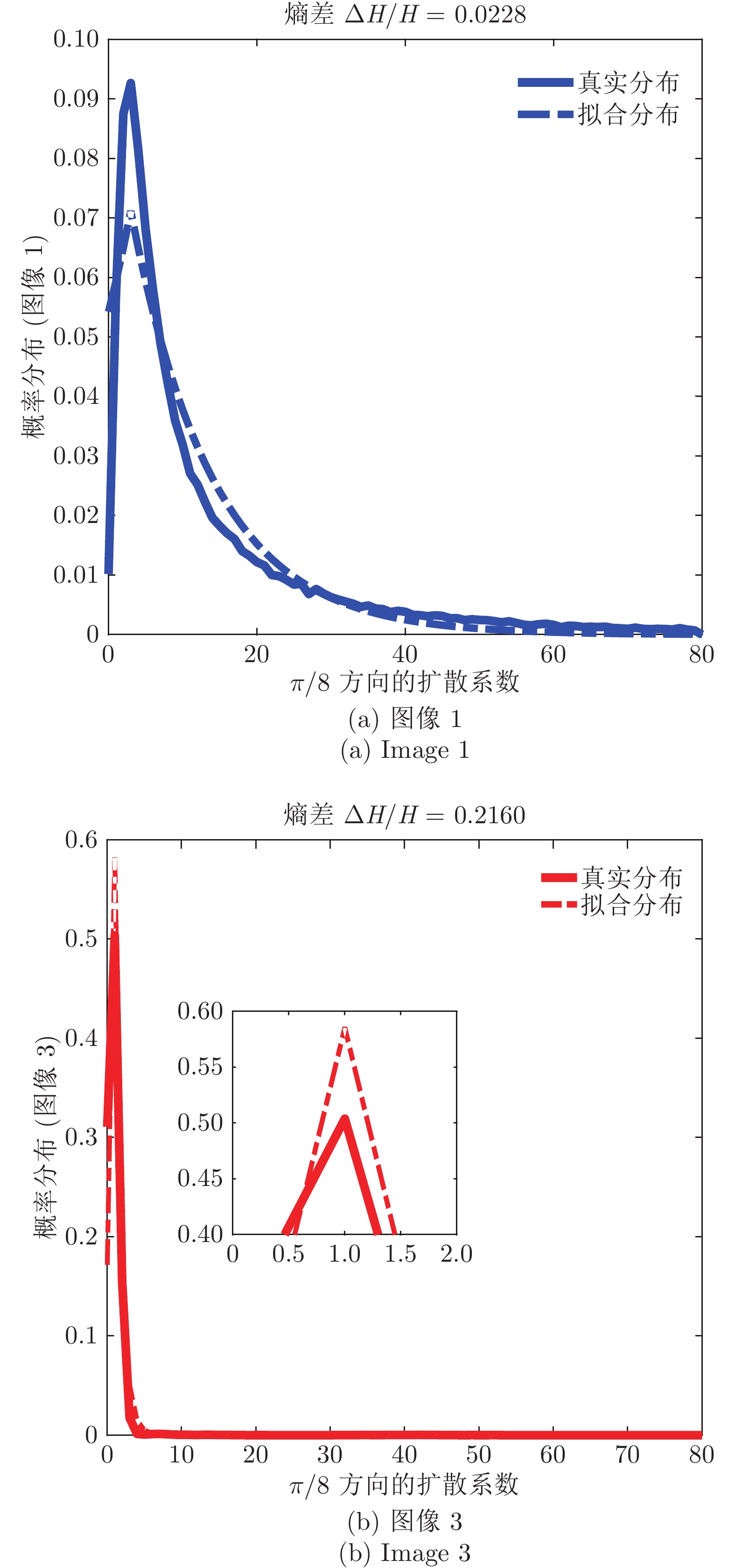
图 7 Woman hat图像1和图像3在第1层级、方向为
$n = \pi /8$ 的扩散系数集合统计的真实分布及拟合分布(实线为真实分布, 虚线为拉普拉斯拟合分布)Fig. 7 Empirical and fitting distribution of diffusion coefficients of woman hat image 1 and image 3 with direction
$n = \pi /8$ in level 1 (The solid line is the empirical distribution, and the dashed line is the Laplace fitting distribution)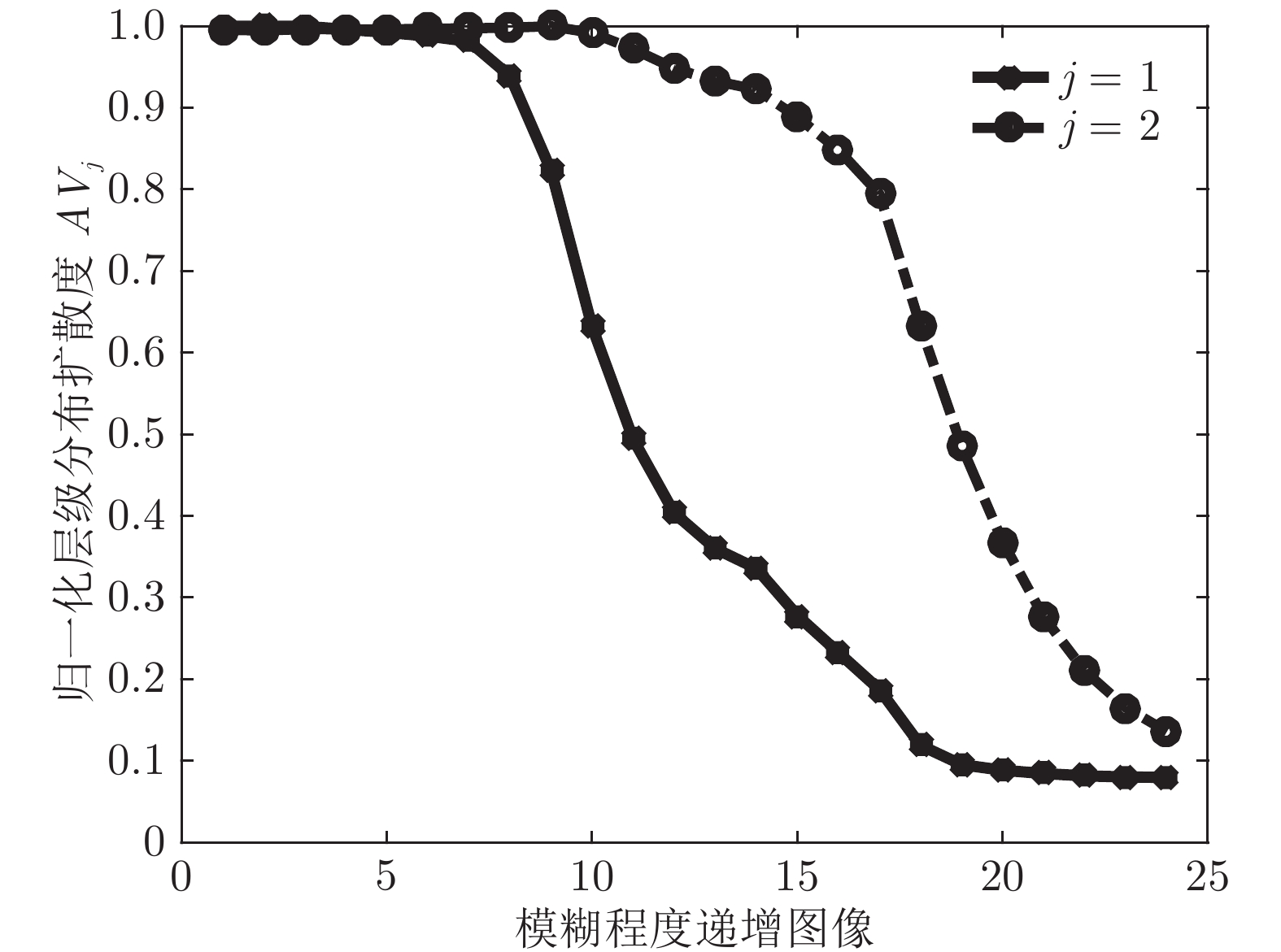
图 8 DIV2K图像序列层级分布的扩散度随模糊递增的变化趋势(实线为层级1, 虚线为层级2)
Fig. 8 The change trend of the variability with the increasing blur of DIV2K image sequences (Solid line is level 1, dotted line is level 2)
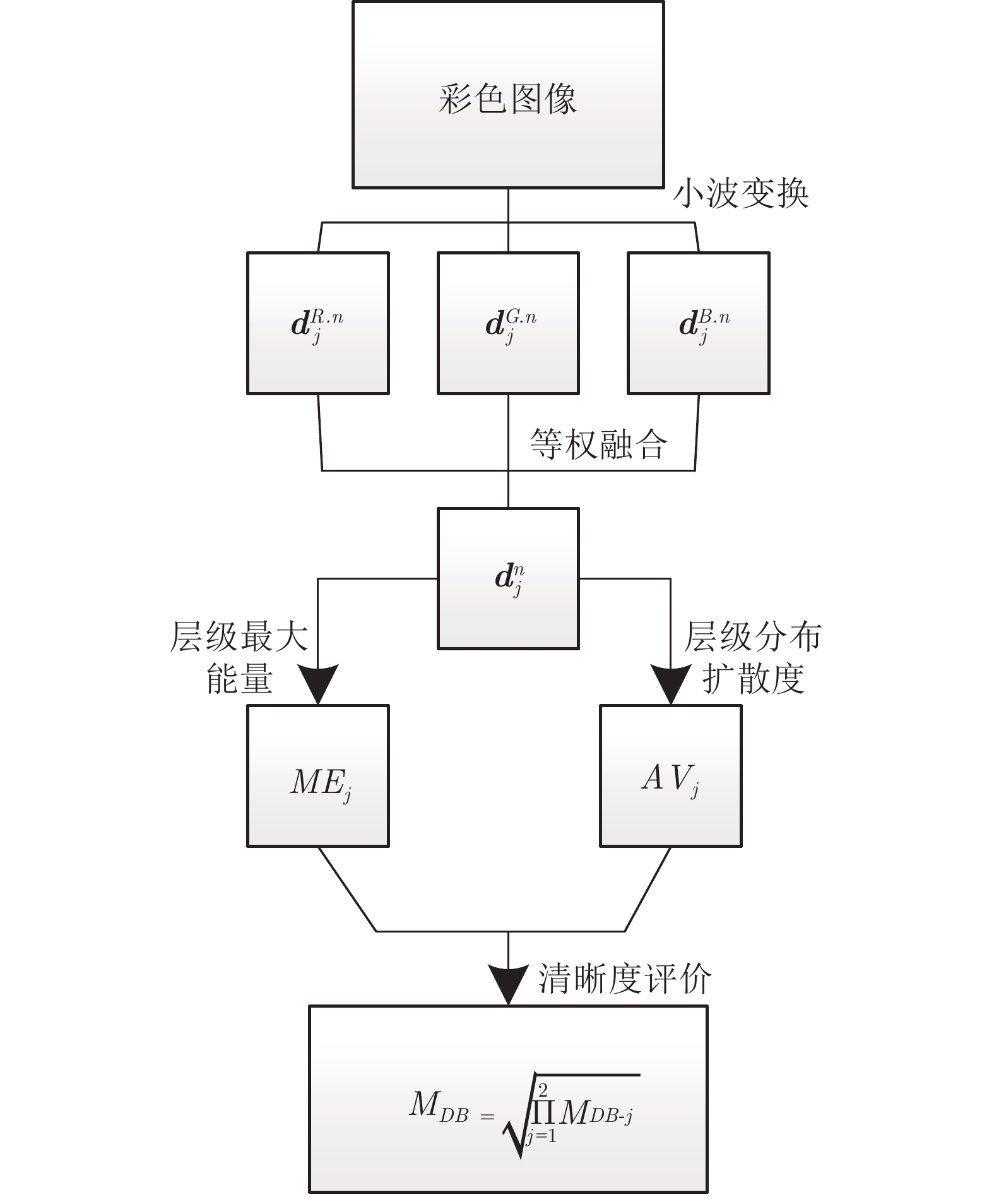
图 10 MDB测度构建流程图(
$j = 1,2$ 表示小波分解层级;$n = k\pi /4,k = 1,2,3,4$ 表示每个层级子带的方向)Fig. 10 Modeling flow of MDB measure (
$j = 1,2$ represents the decomposition level of the traditional wavelet;$n = k\pi /4,k = 1,2,3,4$ represents the subbands directions in each level)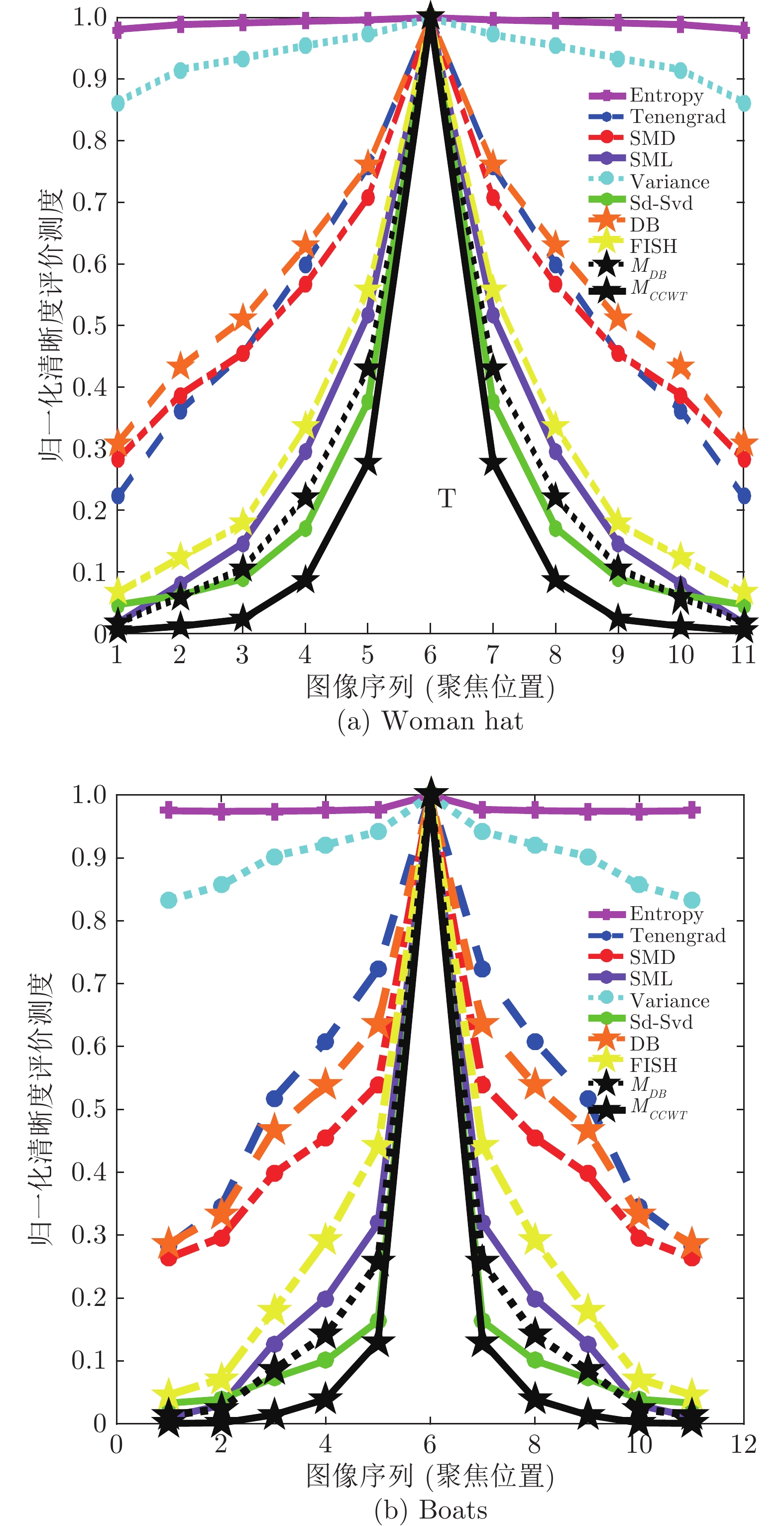
图 11 各清晰度评价方法在图像序列上的性能定性比较
Fig. 11 Qualitative comparison of the performance of each sharpness assessment method in the Gaussian blur image sequences
表 1 图像高斯模糊的方差及窗口大小
Table 1 The variance and window size of image Gaussian blur
图像 $\sigma _h^2 $ 窗口大小 图像 $\sigma _h^2 $ 窗口大小 1 0.28 3 13 0.964 7 2 0.29 3 14 1 7 3 0.3 3 15 1.1 7 4 0.32 3 16 1.2 9 5 0.33 3 17 1.33 9 6 0.34 3 18 1.67 11 7 0.35 3 19 2 13 8 0.4 3 20 2.33 15 9 0.5 3 21 2.67 17 10 0.66 5 22 3 19 11 0.8 5 23 3.33 21 12 0.906 7 24 3.67 23  下载: 导出CSV
下载: 导出CSV
表 2 DIV2K中层级1、方向为
$n = 4\pi /8$ 的子带的真实分布与拟合分布熵差Table 2 In DIV2K, the entropy difference between the empirical distribution and the fitting distribution of the subband with direction
$n = 4\pi /8$ in level 1图像 $\Delta H/H$ 图像 $\Delta H/H$ 1 0.0254 13 0.0278 2 0.0253 14 0.0281 3 0.0252 15 0.0290 4 0.0246 16 0.0303 5 0.0243 17 0.0225 6 0.0239 18 0.0367 7 0.0235 19 0.0415 8 0.0224 20 0.0681 9 0.0241 21 0.1853 10 0.0259 22 0.4329 11 0.0265 23 0.8159 12 0.0274 24 1.2271
下载: 导出CSV
表 3 各清晰度评价算法在LIVE数据库gblur图像序列中的聚焦精度和分辨率均值(e = 1%)
Table 3 The average of accuracy metrics and resolution metrics of each sharpness assessment method in Gaussian blur image sequences of LIVE (gblur) database (e = 1%)
Methods 精度(AM) 精度提升(%) 分辨率(RM) 分辨率提升(%) Entropy[3] 5.4621 99.32 9.0081 82.09 Tenengrad[6] 0.1130 66.99 6.1262 73.67 SMD[8] 0.0756 50.66 6.1054 73.58 SML[9] 0.0543 31.31 3.2748 50.74 Variance[15] 0.5798 93.57 8.6133 81.27 Sd-Svd[11] 0.0380 1.84 2.1322 24.34 DB[15] 0.0950 0.74 6.5152 75.24 FISH[14] 0.0636 41.35 3.9004 58.64 MDB 0.0407 8.35 2.4862 35.11 MCCWT 0.0373 − 1.6132 −
下载: 导出CSV
表 4 各清晰度评价算法在IVC数据库Flou图像序列中的聚焦精度和分辨率均值(e = 1%)
Table 4 The average of accuracy metrics and resolution metrics of each sharpness assessment method in Gaussian blur image sequences of IVC (Flou) database (e = 1%)
Methods 精度(AM) 精度提升(%) 分辨率(RM) 分辨率提升(%) Entropy[3] 2.5343 99.03 9.1027 94.47 Tenengrad[6] 0.0785 68.66 6.2105 92.32 SMD[8] 0.0517 52.42 6.0649 92.13 SML[9] 0.0323 23.84 1.7217 72.29 Variance[15] 0.4067 93.95 8.7291 94.53 Sd-Svd[11] 0.0265 7.17 2.2631 78.92 DB[15] 0.0645 61.86 6.4927 92.65 FISH[14] 0.0404 39.11 2.8601 83.32 MDB 0.0299 17.73 1.6301 70.73 MCCWT 0.0246 − 0.4771 −
下载: 导出CSV
表 5 各清晰度评价算法在LIVE数据库gblur图像序列中的最大值错误次数(噪声存在于图像2)
Table 5 The number of errors in the maximum value of each sharpness assessment method in the Gaussian blur image sequence of LIVE (gblur) database (noise in image 2)
下载: 导出CSV
表 6 各清晰度评价算法在LIVE数据库gblur图像序列中的最大值错误次数(噪声存在于图像3)
Table 6 The number of errors in the maximum value of each sharpness assessment method in the Gaussian blur image sequence of LIVE (gblur) database (noise in image 3)
下载: 导出CSV
表 7 各清晰度评价算法在LIVE数据库gblur图像序列中的最大值错误次数(噪声存在于图像4)
Table 7 The number of errors in the maximum value of each sharpness assessment method in the Gaussian blur image sequence of LIVE (gblur) database (noise in image 4)
下载: 导出CSV
表 8 各清晰度评价算法在LIVE数据库gblur图像序列中的平均运行时间
Table 8 Average running time of each sharpness assessment method in LIVE (gblur) database
下载: 导出CSV
表 9 各清晰度评价算法在IVC数据库Flou图像序列中的平均运行时间
Table 9 Average running time of each sharpness assessment method in IVC (Flou) database
下载: 导出CSV
-
[1] 谢攀, 张利, 康宗明, 谢时根. 一种基于尺度变化的DCT自动聚焦算法. 清华大学学报(自然科学版), 2003, 43(1): 55−58 doi: 10.3321/j.issn:1000-0054.2003.01.017Xie Pan, Zhang Li, Kang Zong-Ming, Xie Shi-Gen. Window scale-based automatic focus algorithm using DCT transformation. Journal of Tsinghua University (Science and Technology), 2003, 43(1): 55−58 doi: 10.3321/j.issn:1000-0054.2003.01.017 [2] 康宗明, 张利, 谢攀. 一种基于能量和熵的自动聚焦算法. 电子学报, 2003, 31(4): 552−555 doi: 10.3321/j.issn:0372-2112.2003.04.020Kang Zong-Ming, Zhang Li, Xie Pan. Implementation of an automatic focusing algorithm based on spatial high frequency energy and entropy. Acta Electronica Sinica, 2003, 31(4): 552−555 doi: 10.3321/j.issn:0372-2112.2003.04.020 [3] 贾旭, 曹玉东, 孙福明, 崔建江, 薛定宇. 基于无参考质量评价模型的静脉图像采集方法. 电子学报, 2015, 43(2): 236−241 doi: 10.3969/j.issn.0372-2112.2015.02.005Jia Xu, Cao Yu-Dong, Sun Fu-Ming, Cui Jian-Jiang, Xue Ding-Yu. Vein image acquisition method based on quality assessment model without reference. Acta Electronica Sinica, 2015, 43(2): 236−241 doi: 10.3969/j.issn.0372-2112.2015.02.005 [4] Firestone L, Cook K, Culp K, Talsania N, Preston K. Comparison of autofocus methods for automated microscopy. Cytometry, 1991, 12(3): 195−206 doi: 10.1002/cyto.990120302 [5] Choi K S, Lee J S, Ko S J. New autofocusing technique using the frequency selective weighted median filter for video cameras. IEEE Transactions on Consumer Electronics, 1999, 45(3): 820−827 doi: 10.1109/30.793616 [6] Tenenbaum J M. Accummodation in Computer Vision, [Ph. D. dissertation], Stanford University, USA, 1970 [7] Zhan Y B, Zhang R. No-Reference image sharpness assessment based on maximum gradient and variability of Gradients. IEEE Transactions on Multimedia, 2018, 20(7): 1796−1808 [8] Jarvis R A. Focus optimization criteria for computer image processing. Microscope, 1976, 24(2): 163−180 [9] Nayar S K, Nakagawa Y. Shape from focus system. IEEE Tansactions Pattern Analysis and Machine Intelligence, 1994, 16(8): 824−831 doi: 10.1109/34.308479 [10] 李郁峰, 陈念年, 张佳成. 一种快速高灵敏度聚焦评价函数. 计算机应用研究, 2010, 27(4): 1534−1536Li Yu-Feng, Chen Nian-Nian, Zhang Jia-Cheng. Fast and high sensitivity focusing evaluation function. Application Research of Computers, 2010, 27(4): 1534−1536 [11] Li Y J, Di X G. A no-reference infrared image sharpness assessment based on singular value decomposition. In: Proceedings of the 2016 Visual Communication and Image Processing. Chengdu China: IEEE, 2016. 1−4 [12] Baina J, Dublet J. Automatic focus and iris control for video cameras. In Proceedings of the Fifth International Conference Image Processing and its Applications. Edinburgh, UK: IEEE, 1995, 232−235 [13] 菅维乐, 姜威, 周贤. 一种基于小波变换的数字图像自动聚焦算法. 山东大学学报: 工学版, 2004, 34(6): 38−40Jian Wei-Le, Jiang Wei, Zhou Xian. Auto-focusing algorithms of aigital image based on wavelet transform. Journal of Shandong University (Engineering Science), 2004, 34(6): 38−40 [14] Vu P V, Chandler D M. A fast wavelet-based algorithm for global and local image sharpness estimation. IEEE Signal Processing Letters. 2012, 19(7): 423−426 [15] 王义文, 刘献礼, 谢晖. 基于小波变换的显微图像清晰度评价函数及3-D自动调焦技术. 光学精密工程, 2006, 14(6): 1063−1069 doi: 10.3321/j.issn:1004-924X.2006.06.023Wang Yi-Wen, Liu Xian-Li, Xie Hui. A wavelet-based focus measure and 3-D autofocusing for microscope images. Optics and Precision Engineering, 2006, 14(6): 1063−1069 doi: 10.3321/j.issn:1004-924X.2006.06.023 [16] Fan Z G, Chen S Q. Autofocus algorithm based on wavelet packet transform for infrared microscopy. In: Proceedings of the 3rd International Congress on Image and Signal Processing, Yantai, China: IEEE, 2010. 2510−2514 [17] Zhang Z, Liu Y, Tan H. No-reference image sharpness assessment using scale and directional models. In: Proceedings of the 2018 IEEE International Conference on Multimedia & Expo. San Diego, CA, USA: IEEE, 2018. 1−6 [18] Weijer J V D, Gevers T, Bagdanov A D. Boosting color saliency in image feature detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 28(1): 150−156 [19] Chen Y, Li D, Zhang J Q. Complementary color wavelet: A novel tool for the color image/video analysis and processing. IEEE Transactions on Circuits and Systems for Video Technology, 2017, 29(1): 12−27 [20] MacAdam D L. Photometric relationships between complementary colors. Journal of the Optical Society of America, 1938, 28(4): 103−111 doi: 10.1364/JOSA.28.000103 [21] Pridmore R W. Complementary colors theory of color vision: Physiology, color mixture, color constancy and color perception. Color Research & Application, 2011, 36(6): 394−412 [22] Selesnick I W, Baraniuk R G, Kingsbury N C. The dual-tree complex wavelet transform. IEEE Signal Processing Magazine, 2005, 22(6): 123−151 doi: 10.1109/MSP.2005.1550194 [23] Born M, Wolf E, Principles of optics. London: Pergamon, 1965. [24] Pentland P A. A new sense for depth of field. pattern analysis and machine intelligence. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, 9(4): 523−531 [25] 陈扬, 李旦, 张建秋. 互补色小波域图像质量盲评价方法. 电子学报, 2019, 47(4): 775−783 doi: 10.3969/j.issn.0372-2112.2019.04.002Chen Yang, Li Dan, Zhang Jian-Qiu. Blind image quality assessment with complementary color wavelet transform. Acta Electronica Sinica, 2019, 47(4): 775−783 doi: 10.3969/j.issn.0372-2112.2019.04.002 [26] 陈扬, 张建秋. 互补色小波域自然场景统计显著图模型. 微电子学与计算机, 2019, 36(3): 17−22, 27Chen Yang, Zhang Jian-Qiu. A naturel scene statistical saliency map model in complementary color wavelet domain. Microelectronics & Computer, 2019, 36(3): 17−22, 27 [27] Ninassi A, Autrusseau F, Callet P L. Pseudo no reference image quality metric using perceptual data hiding. In: Proceedings of the International Society for Optical and Engineering. California, USA: SPIE, 2006. [28] Timofte R, Agustsson E, Gool L V. NTIRE 2017 challenge on single image super-resolution: methods and results. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Honolulu, HI, USA: IEEE, 2017. 1110−1121 [29] 苑津莎, 张冬雪, 李中. 基于改进阈值法的小波去噪算法研究. 华北电力大学学报, 2010, 37(5): 92−97Yuan Jin-Sha, Zhang Dong-Xue, Li Zhong. Wavelet denosing algorithm based on improved thresholding method. Joumal of North China Electric Power University, 2010, 37(5): 92−97 [30] Sendur L, Selesnick I W. Bivariate shrinkage functions for wavelet-based denoising exploiting interscale dependency. IEEE Transactions on Signal Processing, 2002, 50(11): 2744−2756 doi: 10.1109/TSP.2002.804091 [31] Sheikh H R, Wang Z, Cormack L, et al. LIVE image quality assessment database release 2(2005)[Online], available: http://live.ece.utexas.edu/research/quality/, September1, 2011 [32] 方开泰, 许建伦. 统计分布. 北京: 科学出版社, 1987. 277−282.Fang Kai-Tai, Xu Jian-Lun. Statistical Distribution. Beijing Science Press, 1987. 277−282 [33] 刘兴宝, 袁道成. 基于纹理分析的小波变换图像清晰度评价方法研究. 仪器仪表学报, 2007, 28(8): 1508−1513Liu Xin-Bao, Yuan Dao-Cheng. Research on image definition criterion using wavelet transform based on the tex ture analysis. Chinese Journal of Scientific Instrument, 2007, 28(8): 1508−1513 期刊类型引用(18)
1. 翟漪璇,宋丽梅,贺瑾胜,朱新军. 低重叠率人体点云拼接方法研究. 应用激光. 2024(03): 204-213 .  百度学术
百度学术2. 毕淳锴,张远辉,付铎. 基于多视角热像图序列的物体表面温度场重建. 计量学报. 2024(07): 997-1006 . 百度学术3. 王耀南,谢核,邓晶丹,毛建旭,李文龙,张辉. 智能制造测量机器人关键技术研究综述. 机械工程学报. 2024(16): 1-18 . 百度学术4. 梁循,李志莹,蒋洪迅. 基于图的点云研究综述. 计算机研究与发展. 2024(11): 2870-2896 . 百度学术5. 冯站银. 三维点云语义分割方法综述. 电视技术. 2023(03): 140-143+148 . 百度学术6. 李颀,郭梦媛. 基于深度学习的休眠期苹果树点云语义分割. 江苏农业学报. 2023(05): 1189-1198 . 百度学术7. 黄淞宣,李新春,刘玉珍. 邻域多维度特征点结合相关熵的点云配准. 激光与红外. 2023(08): 1163-1170 . 百度学术8. 单铉洋,孙战里,曾志刚. RFNet:用于三维点云分类的卷积神经网络. 自动化学报. 2023(11): 2350-2359 . 本站查看9. 马洁莹,田暄,翟庆,王丞. 基于点到面度量的多视角点云配准方法. 西安交通大学学报. 2022(06): 120-132 . 百度学术10. 杨宜林,李积英,王燕,俞永乾. 基于NDT和特征点检测的点云配准算法研究. 激光与光电子学进展. 2022(08): 198-204 . 百度学术11. 鲁斌,范晓明. 基于改进自适应k均值聚类的三维点云骨架提取的研究. 自动化学报. 2022(08): 1994-2006 . 本站查看12. 陈亚超,樊彦国,樊博文,禹定峰. 基于相对几何不变性的点云粗配准算法研究. 计算机工程与应用. 2022(24): 233-238 . 百度学术13. 庄仁诚,陈鹏,傅瑶,黄运华. 列车车轮三维结构光检测中的点云处理研究. 中国测试. 2021(02): 19-25 . 百度学术14. 沈小军,于忻乐,王远东,程林,王东升,陈佳. 变电站电力设备红外热像测温数据三维可视化方案. 高电压技术. 2021(02): 387-395 . 百度学术15. 杨贵强,李瑞,刘玉君,汪骥,周玉松. 最大相关熵的船体分段扫描数据配准算法. 中国造船. 2021(01): 183-191 . 百度学术16. 元沐南,李晓风,李皙茹,许金林. 基于压缩感知的三维足型重建平台. 电子测量技术. 2020(09): 94-98 . 百度学术17. 林伟,孙殿柱,李延瑞,沈江华. 复杂型面约束的点云配准序列确定方法. 小型微型计算机系统. 2020(09): 2012-2016 . 百度学术18. 黄思捷,梁正友,孙宇,李轩昂. 单Kinect+圆盒的多视角三维点云配准方法研究. 现代计算机. 2020(31): 38-45 . 百度学术其他类型引用(17)
-


 下载:
下载:



























计量
- 文章访问数: 924
- HTML全文浏览量: 149
- PDF下载量: 142
- 被引次数: 35
