

Nonlinear Longitudinal Control for Heterogeneous Connected Vehicle Platoon in the Presence of Communication Delays
-
摘要: 针对通信延时环境下的异质车辆队列控制问题, 本文提出了一种基于三阶模型的分布式非线性车辆队列纵向控制器. 首先, 基于三阶动力学模型描述了车辆的异质特性. 考虑车辆跟驰行为以及异质通信延时, 提出一种通信延时环境下的异质车辆队列非线性控制器. 所提控制器不仅可以在通信延时以及车辆异质特性的影响下实现队列中车辆的位置、速度以及加速度的一致性, 而且可以有效避免负的车辆间距和不合理的加/减速度, 保证车辆的运动行为符合交通流理论. 然后, 利用Lyapunov-Krasovskii定理对车辆队列的稳定性进行分析, 得出车辆队列的稳定性条件和通信延时上界. 最后, 所提控制器的有效性和稳定性通过数值仿真得到验证.Abstract: This paper proposes a distributed nonlinear longitudinal controller for the connected vehicle platoon in the presence of communication delay based on the third-order model. Firstly, the third-order based dynamic model is used to characterize the heterogeneity of a vehicle. A new nonlinear controller for connected vehicle platoon is proposed in the presence of car-following interactions and communication delays. The proposed controller not only can ensure the consensus for vehicles in the platoon in terms of position, velocity and acceleration/deceleration under the influence of communication delay and vehicle heterogeneity, but also effectively avoid negative spacing error and unreasonable acceleration/deceleration, so as to guarantee that the behavior of vehicles is consistent with the traffic flow theory. Then, the stability condition of the vehicle platoon and the upper bound of the communication delay are derived using the Lyapunov-Krasovskii theorem. Finally, the effectiveness and stability of the proposed controller are verified by numerical simulations.1) 收稿日期 2019-06-06 录用日期 2019-10-28 Manuscript received June 6, 2019; accepted October 28, 2019 国家自然科学基金 (61773082), 重庆市重点研发项目基金 (cstc2018jszxcyzdX0064), 重庆市重点基金 (cstc2017jcyjBX0018), 国家重点研发计划 (2016YFB0100906 , 2018YFB1600500) , 重庆邮电大学重点专项 基金(A2018-02) 资助 Supported by National Natural Science Foundation of China (61773082), Key Project of Chongqing under (cstc2018jszxcyzdX0064), Key Natural Science Foundation of Chongqing (cstc2017jcyjBX0018), National Key Research and development Program of China (2016YFB0100906 and 2018YFB1600500), and Key Project of chonging university of Posts and Teleconnunications, (A2018-02) 本文责任编委 吕宜生 Recommended by Associate Editor WU Yan-Hua 1.重庆邮电大学自动化学院智能空地协同控制重庆市高校重点实验室 重庆 400065 1.Key Laboratory of Intelligent Air-Ground Cooperative Control2) for Universities in Chongqing, College of Automation, Chongqing University of Posts and Telecommunications, Chongqing 400065
-
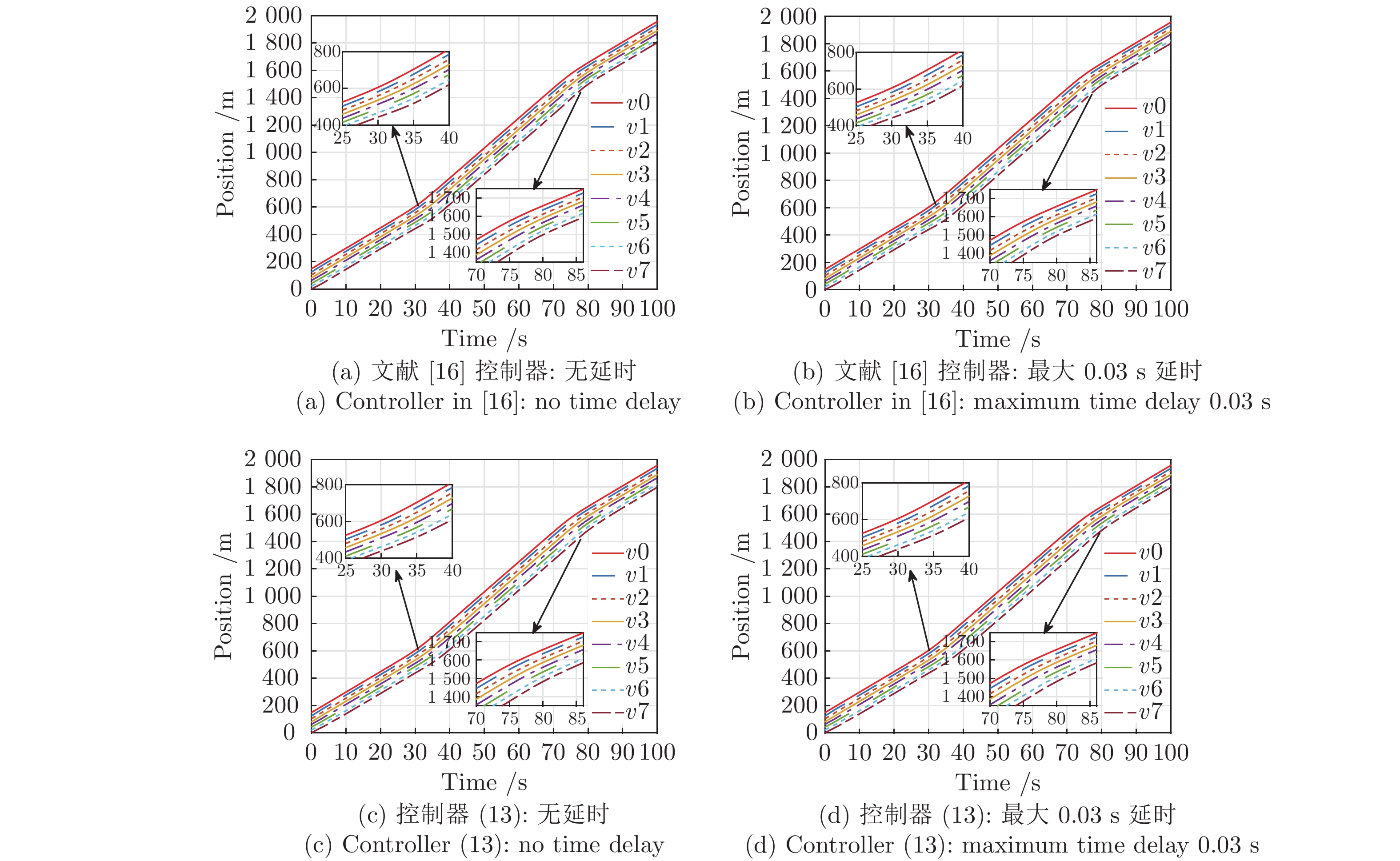
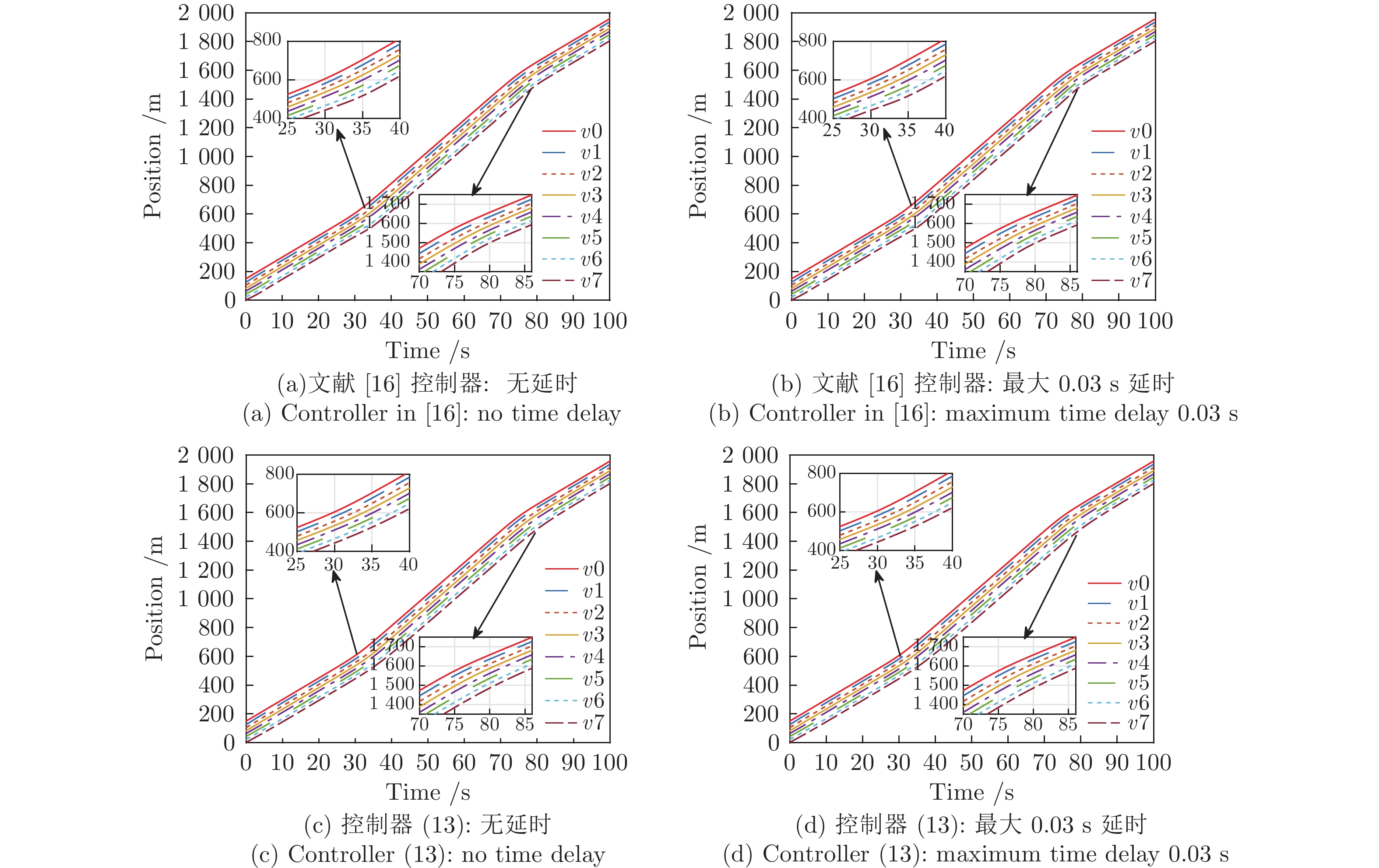
图 7 TPF拓扑下车辆队列的位置轨迹图
Fig. 7 Position trajectory profile for a platoon under TPF topology
表 1 控制器参数
Table 1 Controller parameters
参数 值 单位 参数 值 单位 $l_{i} $ $l_{1}=4.1$, $l_{2}=4$, $l_{3}=4.2$, $l_{4}=4.5$, $l_{5}=4.3$, $l_{6}=4.8$, $l_{7}=5$ m $g_{s} $ 10 m $\tau _{T,i} $ $\tau_{T,1} =0.4$, $\tau _{T,2}=0.55$, $\tau_{T,3}=0.32$, $\tau _{T,4} =0.44$,
$\tau _{T,5}=0.38$,$\tau_{T,6} =0.51$, $\tau _{T,7} =0.29$s $h_{ij} $ 0.8 s $k_{i,w} $ 0.1 — $V_{1} $ 0.675 m/s $k_{i,v} $ 0.9 — $V_{2} $ 7.91 m/s $ k_{i,p} $ $k_{0,p} =k_{1,p} =0.8$, $k_{2,p}=0.28$, $k_{3,p} =0.32$,
$k_{4,p} =0.19$, $k_{5,p} =0.18$, $k_{6,p}=0.176$, $k_{7,p} =0.176$— $C_{1} $ 0.13 m−1 $\tau ^{{\rm *}} $ $10.32\times 10^{-2} $ s $C_{2} $ 1.57 —  下载: 导出CSV
下载: 导出CSV
-
[1] Van Arem B, Van Driel G, Visser R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Transact ions on Intelligent Transportation Systems, 2006, 7(4): 429-436 doi: 10.1109/TITS.2006.884615 [2] Varaiya P. Smart cars on smart roads: problems of control. IEEE Transactions on Automatic Control, 1993, 38(2): 195-207 doi: 10.1109/9.250509 [3] Zhang J P, Wang F Y, Wang K F, Lin W H, Xu X, Chen C. Data-driven intelligent transportation systems: a survey. IEEE Transactions on Intell igent Transportation Systems, 2011, 12(4): 1624-1639 doi: 10.1109/TITS.2011.2158001 [4] Ren W. Consensus based formation control strategies for multi-vehicle systems. In: Proceedings of the 25th American Control Conference. Minnesota, USA: IEEE, 2006. 4237−4242 [5] Guo G and Wen S. Communication scheduling and control of a platoon of vehicles in vanets. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1551-1563 doi: 10.1109/TITS.2015.2505407 [6] Liu Y, Pan C, Gao H, Guo G. Cooperative spacing control for interconnecte d vehicle systems with input delays. IEEE Transactions on Vehicular Technology, 2017, 66(12): 10692-10704 doi: 10.1109/TVT.2017.2712146 [7] Zheng Y, Li S E, Wang J Q, Cao D P, Li K Q. Stability and scalability of homogeneous vehicular platoon: study on the influence of information flow topologies. IEEE Transactions on Intelligent Transportation Systems, 2016, 17 (1): 14-26 doi: 10.1109/TITS.2015.2402153 [8] Li Y F, Tang C C, Li K Z, Peeta S, He X Z, Wang Y B. Nonlinear finite-time consensus-based connected vehicle platoon control under fixed and switching communication topologies. Transportation Research Part C: Emerging Technologies, 2018, 19 : 525-543 [9] Guo G, Wang L. Control over medium-constrained vehicular networks with fading channels and random access protocol: a networked systems approach. IEEE Transactions on Vehicular Technology, 2015, 64(8): 3347-3358 doi: 10.1109/TVT.2014.2360438 [10] Peters A A, Middleton R H, Mason O. Leader tracking in homogeneous vehicle platoons with broadcast delays. Automatica, 2014, 50(1): 64-74 doi: 10.1016/j.automatica.2013.09.034 [11] Wen S X, Guo G, Chen B, Gao X. Event-triggered cooperative control of vehicle platoons in vehicular ad hoc networks. Information Sciences, 2018, 459: 341-353 doi: 10.1016/j.ins.2018.02.051 [12] Jia D Y, Ngoduy D. Platoon based cooperative driving model with consideration of realistic inter-vehicle communication. Transportation Research Part C: Emerging Technologies, 2016, 68: 245-264 doi: 10.1016/j.trc.2016.04.008 [13] Guo G, Yue W. Hierarchical platoon control with heterogeneous information feedback. IET Control Theory & Applications, 2011, 5(15): 1766-1781 [14] Li Y F, Tang C C, Li K Z, He X Z, Peeta S, Wang Y B. Consensus-based cooperative control for multi-platoon under the connected vehicles environment. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2220-2229 doi: 10.1109/TITS.2018.2865575 [15] Ma Y, Li Z, Malekian R, Zhang R, Song X, Sotelo M A, Hierarchical fuzzy logic-based variable structure control for vehicles platooning. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1329-1340 doi: 10.1109/TITS.2018.2846198 [16] Zheng Y, Bian Y G, Li S, Li S E. Cooperative control of heterogeneous connected vehicles with directed acyclic interactions. IEEE Intelligent Transportation Systems Magazine, 2021, 13(2): 127−141 [17] Guo G, Yue W. Sampled-data cooperative adaptive cruise control of vehicles with sensor failures. IEEE Transactions on Intelligent Transportation Systems, 2014, 15 (6): 2404-2418 doi: 10.1109/TITS.2014.2316016 [18] Wen S X, Guo G, Chen B, Gao X. Cooperative adaptive cruise control of vehicles using a resource-efficient communication mechanism. IEEE Transactions on Intelligent Vehicles, 2019, 4(1): 127-140 doi: 10.1109/TIV.2018.2886676 [19] Zhu Y, Zhu F. Distributed adaptive longitudinal control for uncertain third-order vehicle platoon in a networked environment. IEEE Transactions on Vehicular Technology, 2018, 67 (10): 9183-9197 doi: 10.1109/TVT.2018.2863284 [20] Lunze J. Adaptive cruise control with guaranteed collision avoidance. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(5): 1897-1907 doi: 10.1109/TITS.2018.2842115 [21] Li Y F, Tang C C, Peeta S, Wang Y B. Integral-sliding-mode braking control for connected vehicle platoon: theory and application. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4618-4628 doi: 10.1109/TIE.2018.2864708 [22] Li Y F, Tang C C, Peeta S, Wang Y B. Nonlinear consensus-based connected vehicle platoon control incorporating car-following interactions and heterogeneous time delays. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2209-2219 doi: 10.1109/TITS.2018.2865546 [23] Xiao L Y, Gao F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194 doi: 10.1109/TITS.2011.2143407 [24] Di Bernardo M, Salvi A, Santini S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 102-112 doi: 10.1109/TITS.2014.2328439 [25] Gu K, Kharitonov V L, Chen J. Stability of Time-Delay Systems. Boston: Birkhäuser, 2012. 147−195 [26] Jiang R, Wu Q S, Zhu Z J. Full velocity difference model for a car-following theory. Physical Review E, 2001, 64(1): 17101-17105 doi: 10.1103/PhysRevE.64.017101 [27] Horn R A, Johnson C R. Matrix Analysis. Cambridge: Cambridge University Press, 1987. 517−527 [28] Salvi A, Santini S, Valente A S. Design, analysis and performance evaluation of a third order distributed protocol for platooning in the presence of time-varying delays and switching topologies. Transportation Research Part C: Emerging Technologies, 2017, 80: 360-383 doi: 10.1016/j.trc.2017.04.013 [29] Feng S, Zhang Y, Li S E, Cao Z, Liu H X, Li L. String stability for vehicular platoon control: Definitions and analysis methods. Annual Reviews in Control, 2019, 47: 81-97 doi: 10.1016/j.arcontrol.2019.03.001 [30] Alasmary W, Zhuang W H. Mobility impact in IEEE 802.11p infrastructureless vehicular networks. Ad Hoc Networks, 2012, 10(2): 222-230 doi: 10.1016/j.adhoc.2010.06.006 -

 下载:
下载:


图(10) / 表(1)
计量
- 文章访问数: 1574
- HTML全文浏览量: 631
- PDF下载量: 412
- 被引次数: 0
