

Multiple Navigation Sensor Fault Diagnose Research Based on Multi-stage Attention Mechanism
-
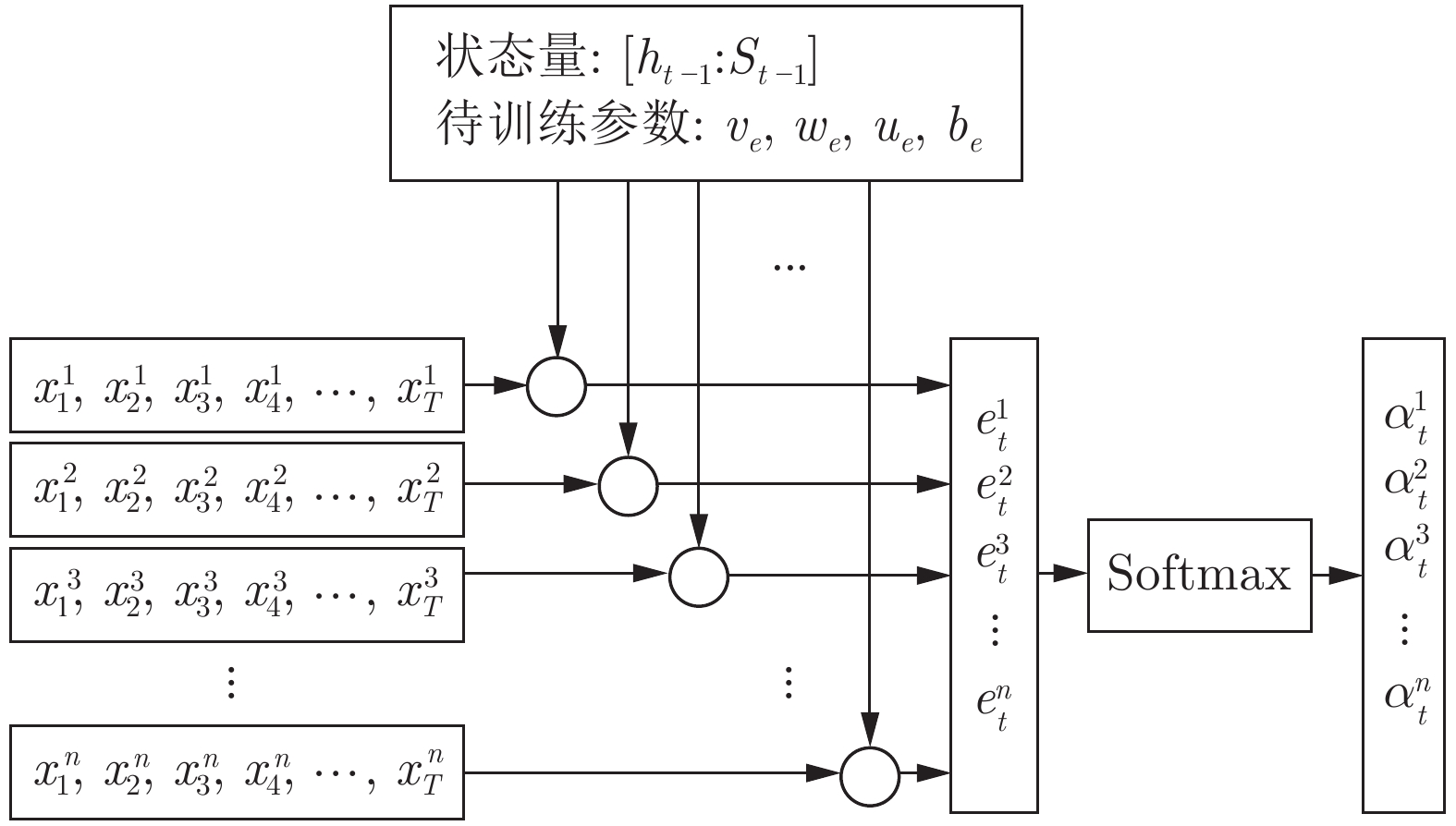
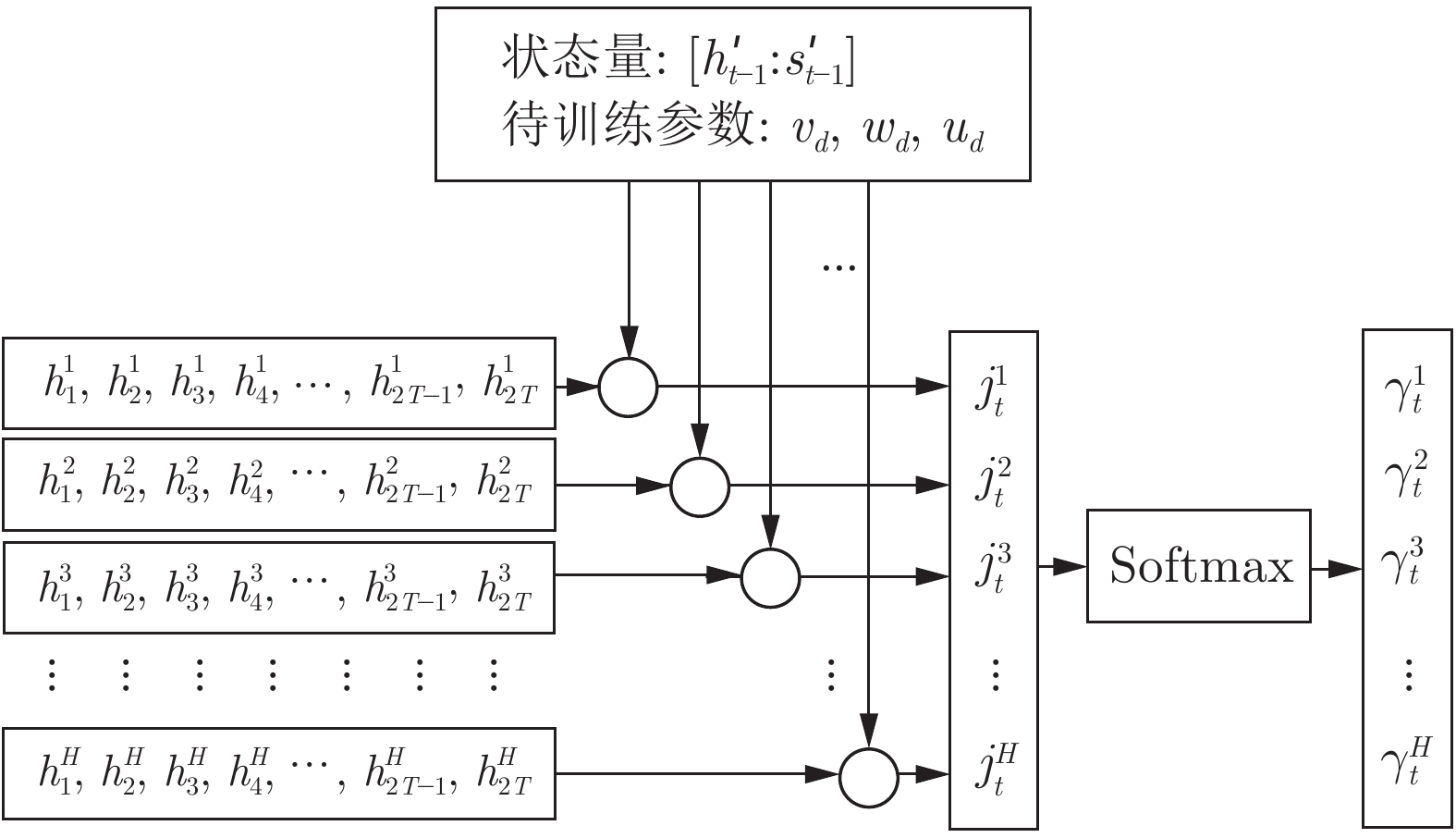
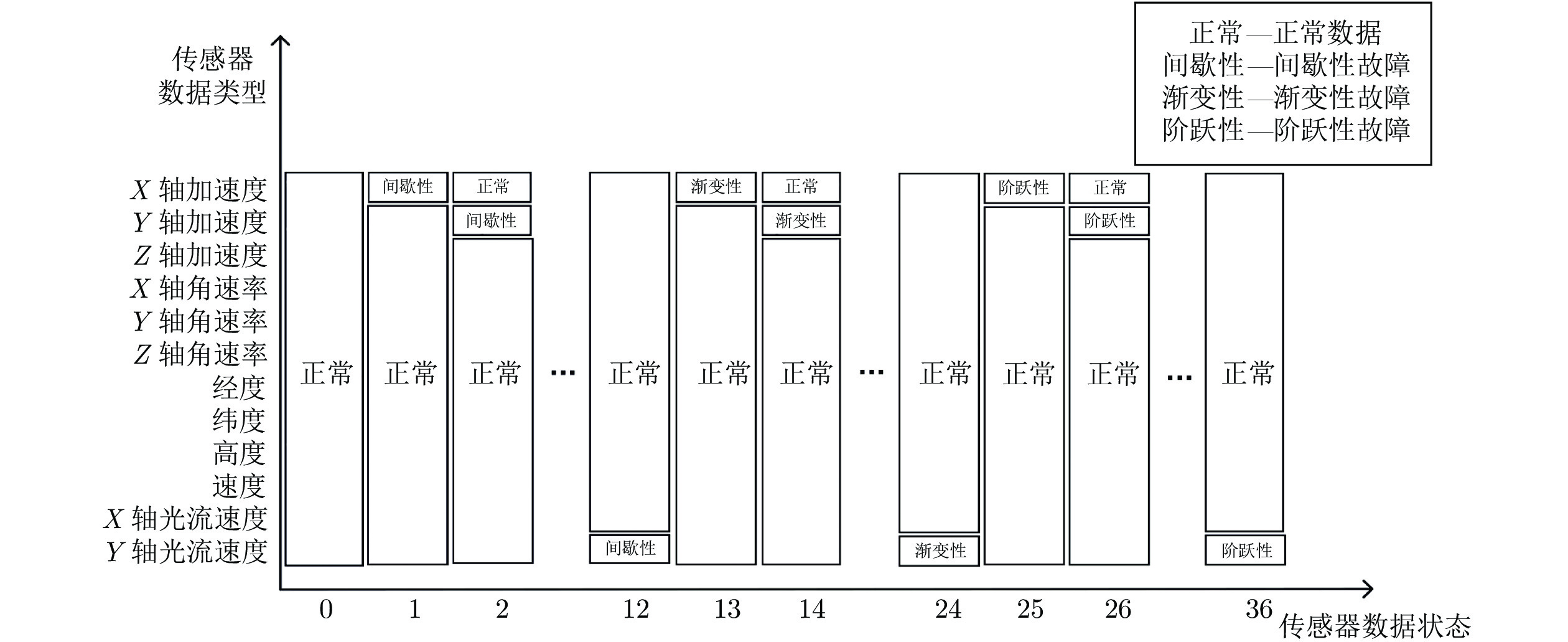
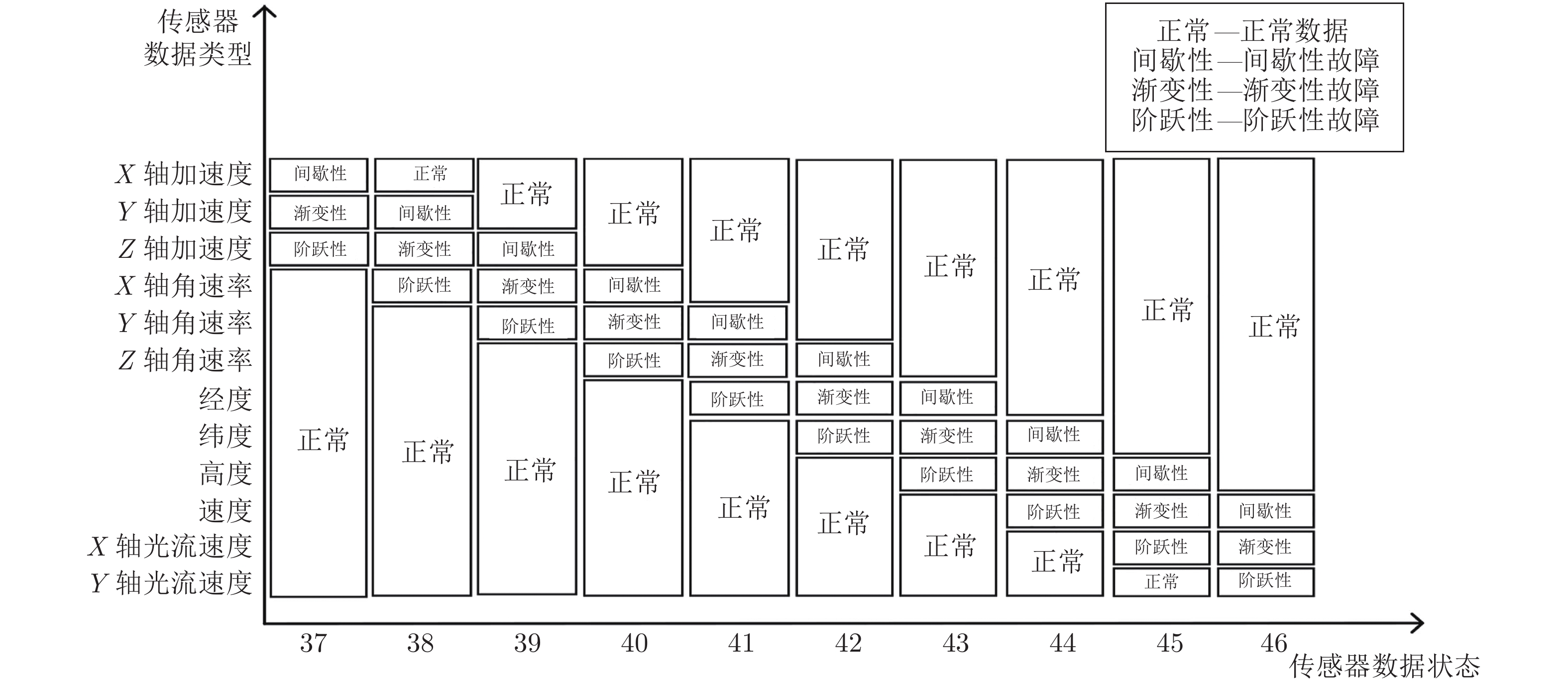
摘要: 导航传感器在使用过程中容易发生故障, 针对传统方法对其间歇性和渐变性故障识别率低的问题提出了一种基于多阶段注意力机制的多传感器故障识别算法. 该算法采用基于长短期记忆神经网络和注意力机制的编码器−解码器结构, 根据多类导航传感器数据之间的空间相关性和时间相关性来进行多传感器的故障互判. 经验证, 该算法对多种类传感器的故障识别率高达97.5%, 可以高效地实现故障的检测和分类. 该方法可以准确识别出故障传感器和故障类型, 具有很强的工程应用价值.Abstract: Since navigation sensors may malfunction in use, a multi-sensor fault diagnosis algorithm based on multi-stage attention mechanism is proposed to solve the problem of low diagnosis rate of intermittent defect and gradual fault. An encoder-decoder structure based on the long short term memory (LSTM) neural network and attention mechanism is adopted in the algorithm, and fault mutual diagnosis between multiple navigation sensors is based on spatial and time correlation between the data of multiple navigation sensors. It is verified that the fault diagnosis rate of the algorithm for multi-type sensors is as high as 97.5%. Besides, sensor faults can be detected and classified effectively by this algorithm. This method which has a strong engineering application value can accurately identify the fault sensor and fault type.
-
表 1 不同模型的实验对比
Table 1 Comparison of experimental results of different models
方法 准确率 (%) 召回率 (%) FDRNN 97.5 96.6 FDRNN-N1 83.4 81.5 FDRNN-N2 81.2 79.4 FDRNN-N3 74.3 72.1 DBN 80.5 78.9 DCNN 84.7 83.6  下载: 导出CSV
下载: 导出CSV
-
[1] 张绍杰, 吴雪, 刘春生. 执行器故障不确定非线性系统最优自适应输出跟踪控制. 自动化学报, 2018, 44(12): 2188-2197Zhang Shao-Jie, Wu Xue, Liu Chun-Sheng. Optimal adaptive output tracking control for a class of uncertain nonlinear systems with actuator failures. Acta Automatica Sinica, 2018, 44(12): 2188-2197 [2] Avram R C, Zhang X D, Muse J. Quadrotor actuator fault diagnosis and accommodation using nonlinear adaptive estimators. IEEE Transactions on Control Systems Technology, 2017, 25(6): 2219-2226 doi: 10.1109/TCST.2016.2640941 [3] 汤文涛, 王振华, 王烨, 沈毅. 基于未知输入集员滤波器的不确定系统故障诊断. 自动化学报, 2018, 44(9): 1717-1724Tang Wen-Tao, Wang Zhen-Hua, Wang Ye, Shen Yi. Fault diagnosis for uncertain systems based on unknown input set-membership filters. Acta Automatica Sinica, 2018, 44(9): 1717-1724 [4] Sadeghzadeh-Nokhodberiz N, Poshtan J. Distributed interacting multiple filters for fault diagnosis of navigation sensors in a robotic system. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1383-1393 doi: 10.1109/TSMC.2016.2598782 [5] Yan Rui, Ma Zhen-Jun, Zhao Yang, Kokogiannakis G. A decision tree based data-driven diagnostic strategy for air handling units. Energy and Buildings, 2016, 133: 37-45 doi: 10.1016/j.enbuild.2016.09.039 [6] Swischuk R, Allaire D. A machine learning approach to aircraft sensor error detection and correction. Journal of Computing and Information Science in Engineering, 2019, 19(4): Article No. 041009 [7] 郑晓飞, 郭创, 姚斌, 冯华鑫. 基于深度学习的航空传感器故障诊断方法. 计算机工程, 2017, 34(7): 281-287 doi: 10.3969/j.issn.1000-3428.2017.07.047Zheng Xiao-Fei, Guo Chuang, Yao Bin, Feng Hua-Xin. Fault diagnosis method for aerial sensor based on deep learning. Computer Engineering, 2017, 34(7): 281-287 doi: 10.3969/j.issn.1000-3428.2017.07.047 [8] Jing L Y, Wang T Y, Zhao M, Wang P. An adaptive multi-sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox. Sensors, 2017, 17(2): Article No. 414 doi: 10.3390/s17020414 [9] Guo D F, Zhong M Y, Ji H Q, Liu Y, Yang R. A hybrid feature model and deep learning based fault diagnosis for unmanned aerial vehicle sensors. Neurocomputing, 2018, 319: 155-163 doi: 10.1016/j.neucom.2018.08.046 [10] 谢超, 赵伟, 王亚朝, 赖际舟, 刘建业. 多导航传感器数据实时并行采集处理与传输系统的研制. 电子测量技术, 2018, 41(21): 67-70Xie Chao, Zhao Wei, Wang Ya-Zhao, Lai Ji-Zhou, Liu Jian-Ye. Development of real-time parallel acquisition, processing and transmission system for multi navigation sensor data. Electronic Measurement Technology, 2018, 41(21): 67-70 [11] 刘建业, 曾庆化, 赵伟, 熊智. 导航系统理论与应用. 西安: 西北工业大学出版社, 2010. 386−396Liu Jian-Ye, Zeng Qing-Hua, Zhao Wei, Xiong Zhi. Theory and Application of Navigation System. Xi'an: Northwestern Polytechnical University Press, 2010. 386−396 [12] Hochreiter S, Schmidhuber J. Long short-term memory. Neural Computation, 1997, 9(8): 1735-1780 doi: 10.1162/neco.1997.9.8.1735 [13] Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez A N, et al. Attention is all you need. In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: NIPS, 2017. 6000−6010 [14] Sutskever I, Vinyals O, Le Q V. Sequence to sequence learning with neural networks. In: Proceedings of the 27th International Conference on Neural Information Processing Systems. Montreal, Canada: NIPS, 2014. 3104−3112 [15] 李航. 统计学习方法. 北京: 清华大学出版社, 2012. 25−33Li Hang. Statistical Learning Methods. Beijing: Tsinghua University Press, 2012. 25−33 [16] Cho K, van Merriënboer B, Gulcehre C, Bahdanau D, Bougares F, Schwenk H, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation. In: Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing. Doha, Qatar: Association for Computational Linguistics, 2014. 1724−1734 [17] Fridman L, Brown D E, Angell W, Abdic I, Reimer B, Noh H Y. Automated synchronization of driving data using vibration and steering events. Pattern Recognition Letters, 2016, 75: 9-15 doi: 10.1016/j.patrec.2016.02.011 -

 下载:
下载:



图(6) / 表(1)
计量
- 文章访问数: 1086
- HTML全文浏览量: 637
- PDF下载量: 303
- 被引次数: 0
