

Distributed Fixed-time Optimization Control for Multi-agent Systems With Set Constraints
-
摘要: 本文研究一类具有状态约束的多智能体系统优化控制问题, 提出了一种具有固定时间收敛特性的分布式优化控制算法. 该控制算法由局部投影模块、一致性模块和梯度模块构成, 其中局部投影模块确保智能体的状态在固定时间内收敛到局部约束集合, 基于时变增益的一致性模块实现所有智能体的状态在固定时间内收敛到一致值, 基于时变增益的梯度模块实现智能体的状态在固定时间内收敛到最优解. 利用凸优化理论和固定时间李雅普诺夫理论, 分析了算法的固定时间收敛特性. 算法收敛时间的上界值不依赖系统的初始条件, 因而可以根据任务需求来预先设计收敛时间. 最后通过数值仿真验证了理论结果的有效性.Abstract: This paper studies a class of optimization problem with local constraints for multi-agent systems, and a distributed optimization algorithm with fixed-time convergence is proposed. The proposed distributed controller consists of local projection module, consensus module and gradient module. The local projection module is used to ensure that the states converge to the local constraint set in the fixed time; the consensus module with time-varying gain guarantees the fixed-time state consensus; the gradient module with time-varying gain ensures the states converge to the optimal solution in fixed-time. The fixed-time convergence of the proposed algorithm is analyzed by using the convex optimization and the fixed-time Lyapunov theory. Since the upper bound of convergence time for the proposed algorithm does not depend on the initial condition, it possible to predesign the convergence time according to the task requirements. Finally, numerical simulations verify the effectiveness of the theoretical results.
-
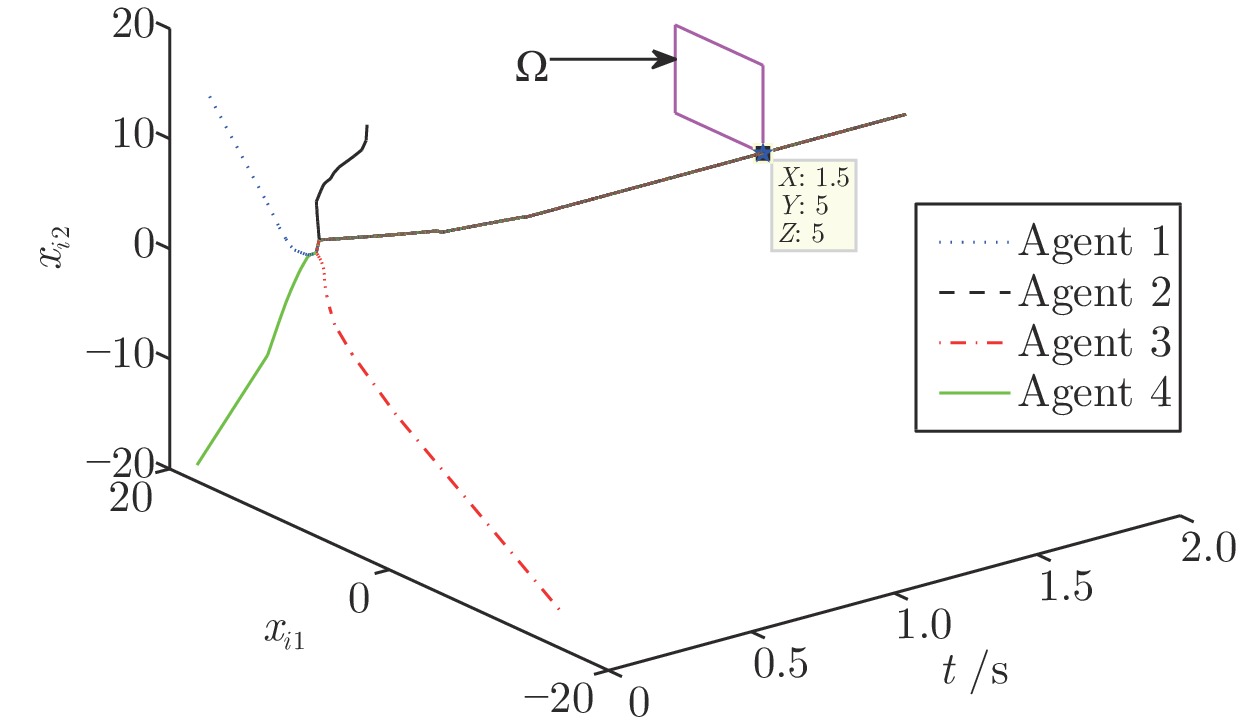
图 1 相同局部集合约束下优化问题(2)的仿真结果
Fig. 1 Simulation results for optimization problem (2) with a common constraint set

图 2 不同局部集合约束下优化问题(2)的仿真结果
Fig. 2 Simulation results for optimization problem (2) with nonidentical local constraint sets
-
[1] Nedić A, Olshevsky A, Rabbat M G. Network topology and communication-computation tradeoffs in decentralized optimization. Proceedings of the IEEE, 2018, 106(5): 953−976 doi: 10.1109/JPROC.2018.2817461 [2] 谢佩, 游科友, 洪奕光, 谢立华. 网络化分布式凸优化算法研究进展. 控制理论与应用, 2018, 35(7): 918−927 doi: 10.7641/CTA.2018.80205Xie Pei, You Ke-You, Hong Yi-Guang, Xie Li-Hua. A survey of distributed convex optimization algorithms over networks. Control Theory and Applications, 2018, 35(7): 918−927 doi: 10.7641/CTA.2018.80205 [3] Nedić A, Ozdaglar A. Distributed subgradient methods for multi-agent optimization. IEEE Transactions on Automatic Control, 2009, 54(1): 48−61 doi: 10.1109/TAC.2008.2009515 [4] Nedić A, Ozdaglar A, Parrilo P A. Constrained consensus and optimization in multi-agent networks. IEEE Transactions on Automatic Control, 2010, 55(4): 922−938 doi: 10.1109/TAC.2010.2041686 [5] Zhu M H, Martínez S. On distributed convex optimization under inequality and equality constraints. IEEE Transactions on Automatic Control, 2012, 57(1): 151−164 doi: 10.1109/TAC.2011.2167817 [6] Zhang Y Q, Lou Y C, Hong Y G. An approximate gradient algorithm for constrained distributed convex optimization. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 61−67 doi: 10.1109/JAS.2014.7004621 [7] Guo F H, Wen C Y, Mao J F, Li G Q, Song Y D. A distributed hierarchical algorithm for multi-cluster constrained optimization. Automatica, 2017, 77: 230−238 doi: 10.1016/j.automatica.2016.11.029 [8] Tuck J, Hallac D, Boyd S. Distributed majorizationminimization for laplacian regularized problems. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 45−52 doi: 10.1109/JAS.2019.1911321 [9] Shi G D, Johansson K H, Hong Y G. Reaching an optimal consensus: Dynamical systems that compute intersections of convex sets. IEEE Transactions on Automatic Control, 2013, 58(3): 610−622 doi: 10.1109/TAC.2012.2215261 [10] Lu J, Tang C Y. Zero-gradient-sum algorithms for distributed convex optimization: The continuous-time case. IEEE Transactions on Automatic Control, 2012, 57(9): 2348−2354 doi: 10.1109/TAC.2012.2184199 [11] Qiu Z R, Liu S, Xie L H. Distributed constrained optimal consensus of multi-agent systems. Automatica, 2016, 68: 209−215 doi: 10.1016/j.automatica.2016.01.055 [12] Yi P, Hong Y G, Liu F. Distributed gradient algorithm for constrained optimization with application to load sharing in power systems. Systems and Control Letters, 2015, 83: 42−52 [13] Le X Y, Chen S J, Yan Z, Xi J T. A neurodynamic approach to distributed optimization with globally coupled constraints. IEEE Transactions on Cybernetics, 2018, 48(11): 3149−3158 doi: 10.1109/TCYB.2017.2760908 [14] Yang S F, Liu Q S, Wang J. A multi-agent system with a proportional-integral protocol for distributed constrained optimization. IEEE Transactions on Automatic Control, 2017, 62(7): 3461−3467 doi: 10.1109/TAC.2016.2610945 [15] Rahili S, Ren W. Distributed continuous-time convex optimization with time-varying cost functions. IEEE Transactions on Automatic Control, 2017, 62(4): 1590−1605 doi: 10.1109/TAC.2016.2593899 [16] 张青, 弓志坤, 杨正全, 陈增强. 多智能体系统的自适应群集分布式优化. 控制理论与应用, 2019, 36(4): 666−672 doi: 10.7641/CTA.2018.80562Zhang Qing, Gong Zhi-Kun, Yang Zheng-Quan, Chen Zeng-Qiang. Distributed optimization for adaptive flocking of multi-agent systems, Control Theory and Applications, 2019, 36(4): 666−672 doi: 10.7641/CTA.2018.80562 [17] Song Y F, Chen W S. Finite-time convergent distributed consensus optimisation over networks. IET Control Theory & Applications, 2016, 10(11): 1314−1318 [18] Hu Z L, Yang J Y. Distributed finite-time optimization for second order continuous-time multiple agents systems with time-varying cost function. Neurocomputing, 2018, 287(11): 173−184 [19] Santilli M, Marino A, Gasparri A. A finite-time protocol for distributed continuous-time optimization of sum of locally coupled strictly convex functions. In: Proceedings of the 2018 IEEE Conference on Decision and Control. Florida, USA: IEEE, 2018. 993−998 [20] Lin P, Ren W, Farrell J A. Distributed continuous-time optimization: Nonuniform gradient gains, finite-time convergence, and convex constraint set. IEEE Transactions on Automatic Control, 2017, 62(5): 2238−2253 [21] Wang L, Xiao F. Finite-time consensus problems for networks of dynamic agents. IEEE Transactions on Automatic Control, 2010, 55(4): 950−955 doi: 10.1109/TAC.2010.2041610 [22] Li S H, Du H B, Lin X Z. Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics. Automatica, 2011, 47(8): 1706−1712 doi: 10.1016/j.automatica.2011.02.045 [23] 刘凡, 杨洪勇, 杨怡泽, 李玉玲, 刘远山. 带有不匹配干扰的多智能体系统有限时间积分滑模控制. 自动化学报, 2019, 45(4): 749−758Liu Fan, Yang Hong-Yong, Yang Yi-Ze, Li Yu-Ling, Liu Yuan-Shan. Finite-time integral sliding-mode control for multi-agent systems with mismatched disturbances, Acta Aotomatica Sinica, 2019, 45(4): 749−758 [24] Polyakov A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Transactions on Automatic Control, 2012, 57(8): 2106−2110 doi: 10.1109/TAC.2011.2179869 [25] Zuo Z Y, Han Q L, Ning B D, Ge X, H Zhang X M. An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2322−2334 doi: 10.1109/TII.2018.2817248 [26] Fu J J, Wang J Z. Finite-time consensus formulti-agent systems with globally bounded convergence time under directed communication graphs. International Journal of Control, 2017, 90(9): 1807−1817 doi: 10.1080/00207179.2016.1223348 [27] Ni J K, Liu L, Liu C X, Liu J. Fixed-time leader-following consensus for second-order multiagent systems with input delay. IEEE Transactions on Industrial Electronics, 2017, 64(11): 8635−8646 doi: 10.1109/TIE.2017.2701775 [28] 陈刚, 李志勇, 韦梦立. 孤岛微电网的分布式固定时间二次协调控制. 控制与决策, 2019, 34(1): 205−212Chen Gang, Li Zhi-Yong, Wei Meng-Li. Distributed fixedtime secondary coordination control of islanded microgrids, Control and Decision, 2019, 34(1): 205−212 [29] Wang Y J, Song Y D, Hill D J, Krstic M. Prescribed-time consensus and containment control of networked multiagent systems. IEEE Transactions on Cybernetics, 2019, 49(4): 1138−1147 doi: 10.1109/TCYB.2017.2788874 [30] Ning B, Han Q, Zuo Z. Distributed optimization for multiagent systems: An edge-based fixed-time consensus approach. IEEE Transactions on Cybernetics, 2019, 49(1): 122−132 doi: 10.1109/TCYB.2017.2766762 [31] Chen G, Li Z Y. A fixed-time convergent algorithm for distributed convex optimization in multi-agent systems. Automatica, 2018, 95: 539−543 doi: 10.1016/j.automatica.2018.05.032 [32] Sun Q Y, Han R K, Zhang H G, Zhou J G, Guerrero J M. A multiagent-based consensus algorithm for distributed coordinated control of distributed generators in the energy internet. IEEE Transactions on Smart Grid, 2015, 6(6): 3006−3019 doi: 10.1109/TSG.2015.2412779 [33] Droge G, Kawashima H, Egerstedt M B. Continuous-time proportional-integral distributed optimisation for networked systems. Journal of Control and Decision, 2014, 1(3): 191−213 doi: 10.1080/23307706.2014.926622 [34] 衣鹏, 洪奕光. 分布式合作优化及其应用. 中国科学: 数学, 2016, 46(10): 1547−1564Yi Peng, Hong Yi-Guang. Distributed cooperative optimization and its applications, Scientia Sinica Mathematica, 2016, 46(10): 1547−1564 [35] Boyd S, Vandenberghe L. Convex Optimization. Cambridge: Cambridge University Press, 2004. 1−716 -

 下载:
下载:




图(3)
计量
- 文章访问数: 1314
- HTML全文浏览量: 150
- PDF下载量: 436
- 被引次数: 0
