

Adaptive Optimal Control for a Class of Nonlinear Systems With Dead Zone Input and Prescribed Performance
-
摘要: 针对一类考虑指定性能和带有输入死区约束的严格反馈非线性系统,本文提出了一种自适应模糊最优控制方法.采用模糊逻辑系统逼近系统的未知非线性函数及代价函数,利用backstepping方法及命令滤波技术,设计前馈控制器.针对仿射形式的误差系统,结合自适应动态规划技术,设计最优反馈控制器.采用指定性能控制方法,将系统跟踪误差约束在指定范围内.利用死区斜率信息解决具有死区输入的非线性系统的控制问题.基于Lyapunov稳定性理论,证明闭环系统内所有信号是一致最终有界的.最后仿真结果验证了本文方法的可行性和有效性.
-
关键词:
- 自适应模糊最优控制 /
- 自适应动态规划 /
- backstepping方法 /
- 输入死区 /
- 指定性能
Abstract: This paper develops an adaptive fuzzy optimal control method for a class of strict-feedback nonlinear systems with dead zone input and prescribed performance. Fuzzy logic systems are used to approximate unknown nonlinear functions and cost functions. Under the command filtered technique and the backstepping method, the feedforward controller is designed. And an optimal feedback controller is derived to stabilize the tracking error dynamics in the affine form via an adaptive dynamic programming technology. Based on the prescribed performance control method, the tracking error can be limited in a prescribed area. Moreover, the control problem of nonlinear systems with dead zone input can be addressed by utilizing the information of dead zone slopes. All signals in the closed-loop system can be proved to be uniformly ultimately bounded by using the of Lyapunov stability theorem. Finally, the simulation results verify the feasibility and effectiveness of the proposed method.-
Key words:
- Adaptive fuzzy optimal control /
- adaptive dynamic programming /
- backstepping method /
- dead zone input /
- prescribed performance
1) 本文责任编委 刘艳军 -
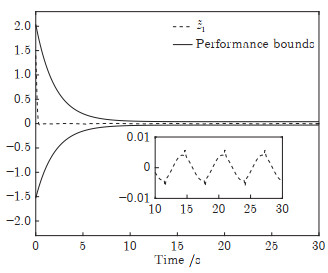
图 2 $ \tilde z_{1}$的轨迹和指定性能边界曲线
Fig. 2 Trajectories of $ \tilde z_{1}$ and performance bounds
图 3 代价函数权值$\hat{w}_{c i}$ 和哈密顿函数 $\hat{H}\left(Z, \hat{U}^{*}\right)$ 的轨迹(i = 1; 2; 3; 4; 5)
Fig. 3 The trajectories of cost functions weights $\hat w_{ci}$ and Hamiltonian $\hat H(Z, \hat U^ *)$ $(i = 1, 2, 3, 4, 5)$
-
[1] Lee H, Tomizuka M. Robust adaptive control using a universal approximator for SISO nonlinear systems. IEEE Transactions on Fuzzy Systems, 2000, 8(1):95-106 doi: 10.1109/91.824777 [2] Ge S S, Wang C. Adaptive NN control of uncertain nonlinear pure-feedback systems. Automatica, 2002, 38(4):671-682 doi: 10.1016/S0005-1098(01)00254-0 [3] Ge S S, Wang C. Direct adaptive NN control of a class of nonlinear systems. IEEE Transactions on Neural Networks, 2002, 13(1):214-221 doi: 10.1109/72.977306 [4] Hu X, Wei X J, Zhang H F, Han J, Liu X H. Robust adaptive tracking control for a class of mechanical systems with unknown disturbances under actuator saturation. International Journal of Robust and Nonlinear Control, 2019, 29(6):1893-1908 doi: 10.1002/rnc.4465 [5] Chen M, Shao S Y, Jiang B. Adaptive neural control of uncertain nonlinear systems using disturbance observer. IEEE Transactions on Cybernetics, 2017, 47(10):3110-3123 doi: 10.1109/TCYB.2017.2667680 [6] Chen C L P, Wen G X, Liu Y J, Liu Z. Observer-based adaptive backstepping consensus tracking control for high-order nonlinear semi-strict-feedback multiagent systems. IEEE Transactions on Cybernetics, 2016, 46(7):1591-1601 doi: 10.1109/TCYB.2015.2452217 [7] Qian W, Gao Y S, Yang Y. Global consensus of multiagent systems with internal delays and communication delays. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018 [8] Qian W, Wang L, Chen M Z Q. Local consensus of nonlinear multiagent systems with varying delay coupling. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, 48(12):2462-2469 doi: 10.1109/TSMC.2017.2684911 [9] Li T S, Wang D, Feng G, Tong S C. A DSC approach to robust adaptive NN tracking control for strict-feedback nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2010, 40(3):915-927 doi: 10.1109/TSMCB.2009.2033563 [10] Dong W J, Farrell J A, Polycarpou M M, Djapic V, Sharma M. Command filtered adaptive backstepping. IEEE Transactions on Control Systems Technology, 2012, 20(3):566-580 doi: 10.1109/TCST.2011.2121907 [11] Bai W W, Zhou Q, Li T S, Li H Y. Adaptive reinforcement learning neural network control for uncertain nonlinear system with input saturation. IEEE Transactions on Cybernetics, DOI: 10.1109/TCYB.2019.292105 [12] Bellman R E. Dynamic Programming. Princeton:Princeton University Press, 1957 [13] 王鼎, 穆朝絮, 刘德荣.基于迭代神经动态规划的数据驱动非线性近似最优调节.自动化学报, 2017, 43(3):366-375 http://www.aas.net.cn/CN/abstract/abstract19015.shtmlWang Ding, Mu Chao-Xu, Liu De-Rong. Data-driven nonlinear nearoptimal regulation based on iterative neural dynamic programming. Acta Automatica Sinica, 2017, 43(3):366-375 http://www.aas.net.cn/CN/abstract/abstract19015.shtml [14] 张化光, 张欣, 罗艳红, 杨珺.自适应动态规划综述.自动化学报, 2013, 39(4):303-311 http://www.aas.net.cn/CN/abstract/abstract17916.shtmlZhang Hua-Guang, Zhang Xin, Luo Yan-Hong, Yang Jun. An overview of research on adaptive dynamic programming. Acta Automatica Sinica, 2013, 39(4):303-311 http://www.aas.net.cn/CN/abstract/abstract17916.shtml [15] Murray J J, Cox C J, Lendaris G G, Saeks R. Adaptive dynamic programming. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2002, 32(2):140-153 doi: 10.1109/TSMCC.2002.801727 [16] Vamvoudakis K G, Lewis F L. Online actor-critic algorithm to solve the continuous-time infinite horizon optimal control problem. Automatica, 2010, 46(5):878-888 doi: 10.1016/j.automatica.2010.02.018 [17] Zargarzadeh H, Dierks T, Jagannathan S. Optimal control of nonlinear continuous-time systems in strict-feedback form. IEEE transactions on neural networks and learning systems, 2015, 26(10):2535-2549 doi: 10.1109/TNNLS.2015.2441712 [18] Wang D, He H B, Zhao B, Liu D R. Adaptive near optimal controllers for nonlinear decentralised feedback stabilisation problems. IET Control Theory and Applications, 2017, 11(6):799-806 doi: 10.1049/iet-cta.2016.1383 [19] Li Y M, Sun K K, Tong S C. Observer-based adaptive fuzzy fault-tolerant optimal control for SISO nonlinear systems. IEEE Transactions on Cybernetics, 2019, 49(2):649-661 doi: 10.1109/TCYB.2017.2785801 [20] Sun J L, Liu C S. Distributed fuzzy adaptive backstepping optimal control for nonlinear multimissile guidance systems with input saturation. IEEE Transactions on Fuzzy Systems, 2019, 27(3):447-461 doi: 10.1109/TFUZZ.2018.2859904 [21] Wei Q L, Liu D R, Lin Q, Song R Z. Adaptive dynamic programming for discrete-time zero-sum games. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(4):957-969 doi: 10.1109/TNNLS.2016.2638863 [22] Fan B, Yang Q M, Tang X Y, Sun Y X. Robust ADP design for continuous-time nonlinear systems with output constraints. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(6):2127-2138 doi: 10.1109/TNNLS.2018.2806347 [23] Chen M, Tao G. Adaptive fault-tolerant control of uncertain nonlinear large-scale systems with unknown dead-zone. IEEE Transactions on Cybernetics, 2016, 46(8):1851-1862 doi: 10.1109/TCYB.2015.2456028 [24] Tong S C, Li Y M. Adaptive fuzzy output feedback control of MIMO nonlinear systems with unknown dead-zone inputs. IEEE Transactions on Fuzzy Systems, 2013, 21(1):134-146 doi: 10.1109/TFUZZ.2012.2204065 [25] Yu J P, Shi P, Dong W J, Lin C. Adaptive fuzzy control of nonlinear systems with unknown dead zones based on command filtering. IEEE Transactions on Fuzzy Systems, 2018, 26(1):46-55 doi: 10.1109/TFUZZ.2016.2634162 [26] Zhang L L, Yang G H. Adaptive fuzzy prescribed performance control of nonlinear systems with hysteretic actuator nonlinearity and faults. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 48(12):2349-2358 doi: 10.1109/TSMC.2017.2707241 [27] Tong S C, Sun K K, Sui S. Observer-based adaptive fuzzy decentralized optimal control design for strict-feedback nonlinear large-scale systems. IEEE Transactions on Fuzzy Systems, 2018, 26(2):569-584 doi: 10.1109/TFUZZ.2017.2686373 -

 下载:
下载:

图(4)
计量
- 文章访问数: 2520
- HTML全文浏览量: 607
- PDF下载量: 268
- 被引次数: 0
