

-
摘要:
图像风格转化在计算机视觉领域广受关注, 其研究目标在于将输入图像利用计算机转化为具有某种特定艺术风格的图像. 线描画作为一种古老的画种, 它通过简单的线条勾勒物体的轮廓, 具有简约、抽象的风格. 本文提出一种基于方向场正则化的线描画生成算法, 该算法由4部分构成: 1)采用非局部平均滤波对输入图像进行预处理; 2)计算输入图像的方向场, 并基于自表示的思想对方向场进行Tikhonov正则化, 为了提高运算速度, 采用Sherman-Morrison-Woodbury公式来对正则化算法进行加速; 3)以正则方向场作为引导, 对预处理图像作高斯差分滤波; 4)根据人类视觉系统的非线性特点, 设计感知阈值(Perceptual thresholding)算法来对高斯差分滤波的结果进行阈值处理, 得到二值化的线描画图像. 仿真实验表明, 该算法可将输入图像转化为线条流畅且能有效表达输入图像主要信息的线描画图像.
-
关键词:
- 线描画 /
- 方向场 /
- Tikhonov正则化 /
- 高斯差分滤波 /
- 感知阈值
Abstract:Image style transfer has attracted much attention in the field of computer vision. Its research goal is to transfer the input image into an image with a specific artistic style by computer. Line drawing as an ancient painting, it outlines the object through simple lines, with a simple, abstract style. This paper proposes a line drawing generation algorithm based on direction field regularization, which consists of four parts: 1) Non-local means filtering is used to preprocess the input image; 2) Calculate the direction field of the input image, and the Tikhonov regularization of the direction field based on the self-representation idea, in order to improve the speed of operation, the Sherman-Morrison-Woodbury formula is used to accelerate the regularization algorithm; 3) Using a regular direction field as a guide, the pre-processed image is filtered by difference of Gaussian filter; 4) According to the non-linear characteristics of human visual system, the perceptual thresholding algorithm is designed to process the results of the Gaussian difference of filtering and obtain binary line drawing image. The simulation results show that the algorithm can transfer the input image into a line drawing image with smooth lines and can effectively express the main information of the input image.
-

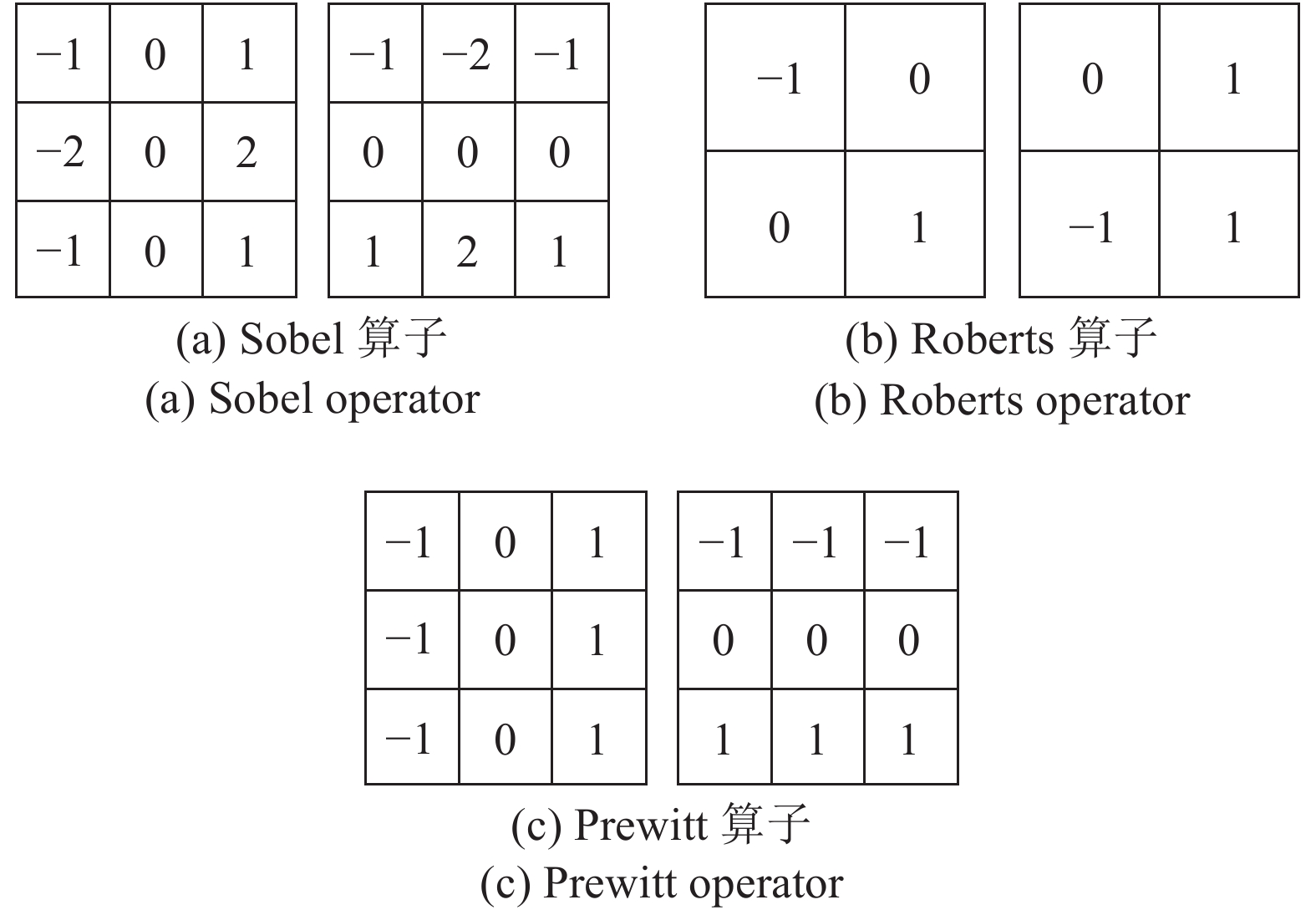
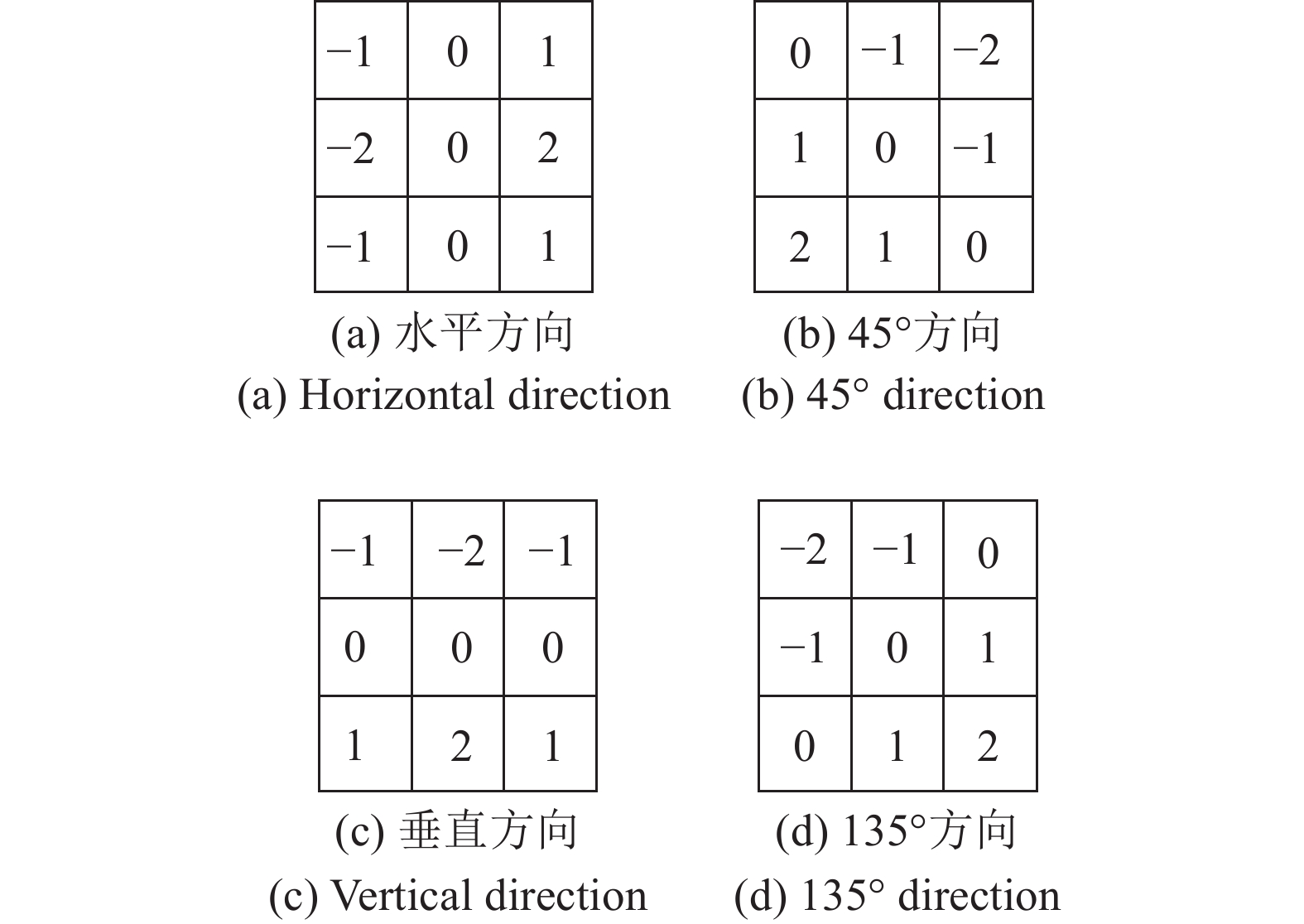
图 3 几种边缘检测算子和本文算法在Baboon上的效果对比
Fig. 3 Comparison of several edge detection operators and the algorithm of this paper on Baboon
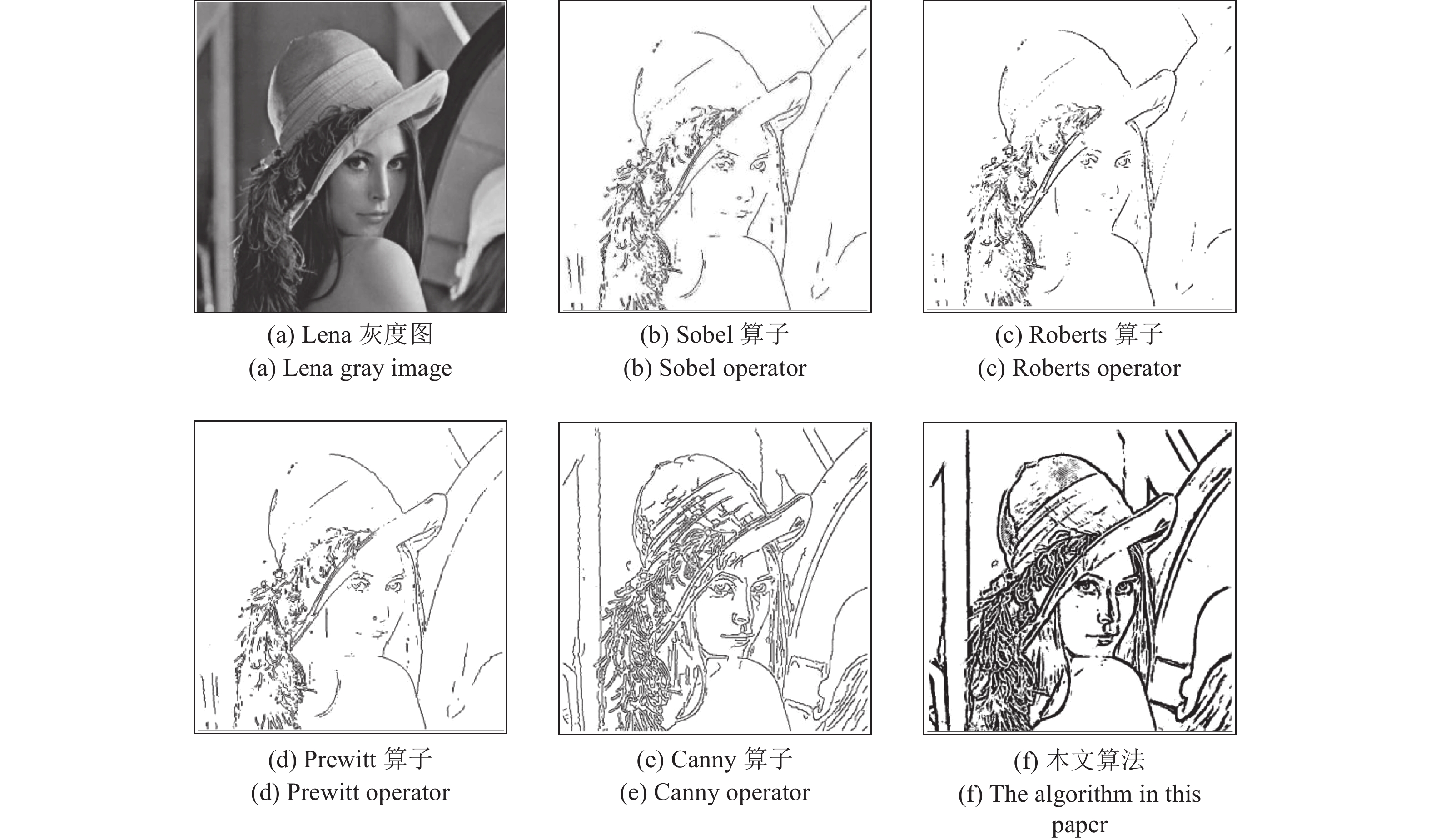
图 4 几种边缘检测算子和本文算法在Lena上的效果对比
Fig. 4 Comparison of several edge detection operators and the algorithm of this paper on Lena
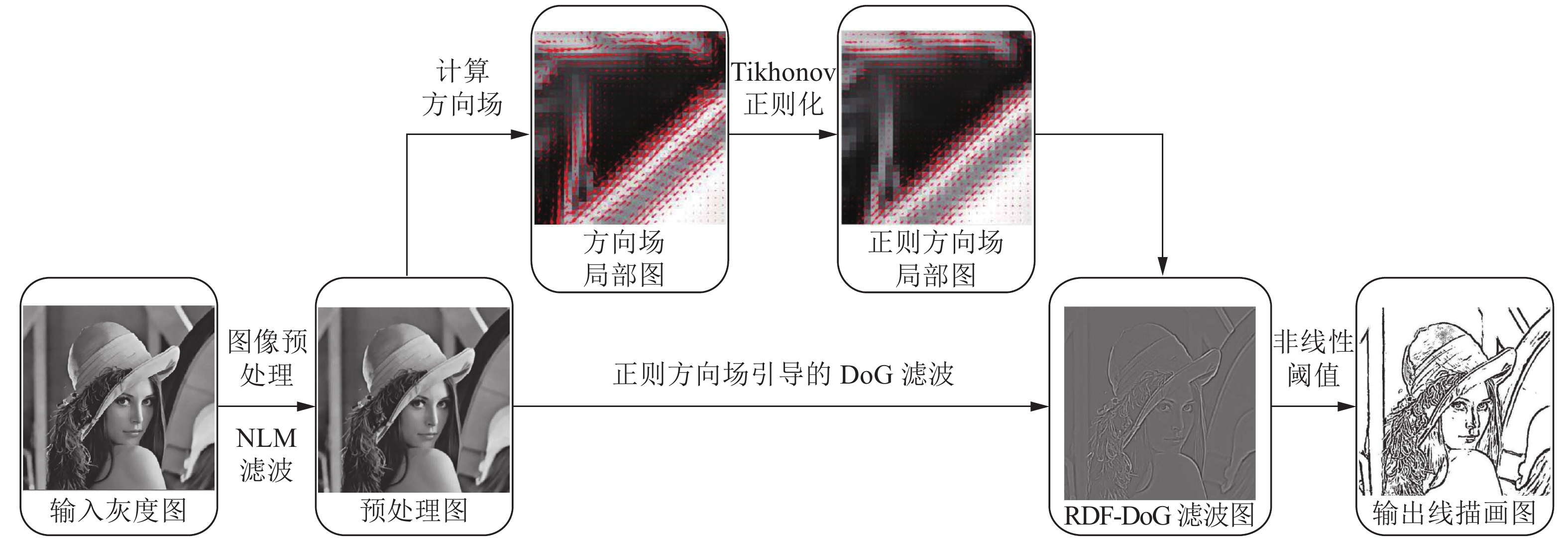
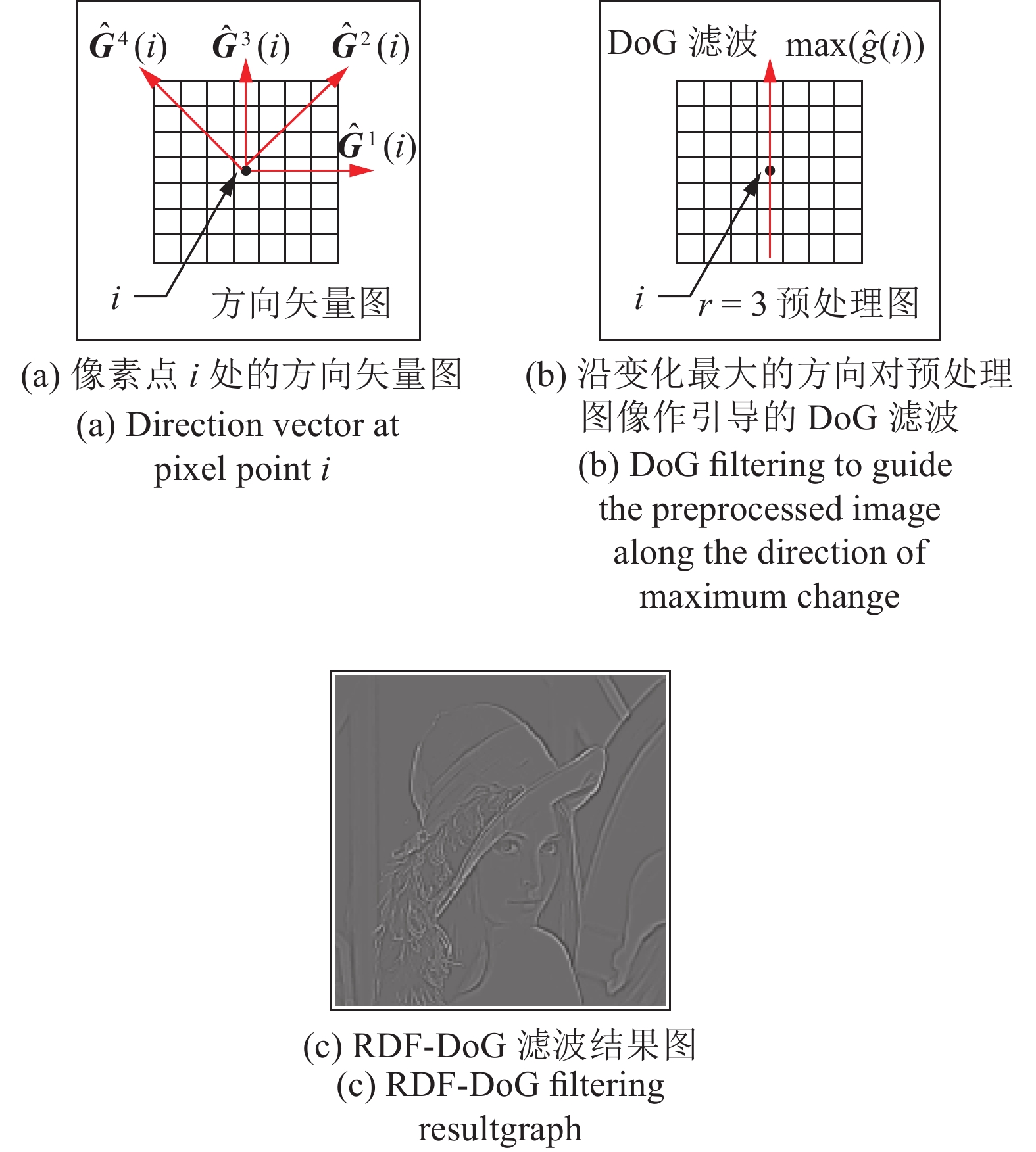
图 5 基于方向场正则化的线描画生成算法框图
(注: 为了使正则化的效果可视, 对方向场进行降维处理且只在Lena局部区域上显示)
Fig. 5 Block diagram of line drawing generation algorithm based on direction field regularization
(Note: In order to make the regularization effect visible, the direction field is dimension-reduced and displayed only on the local area of Lena)
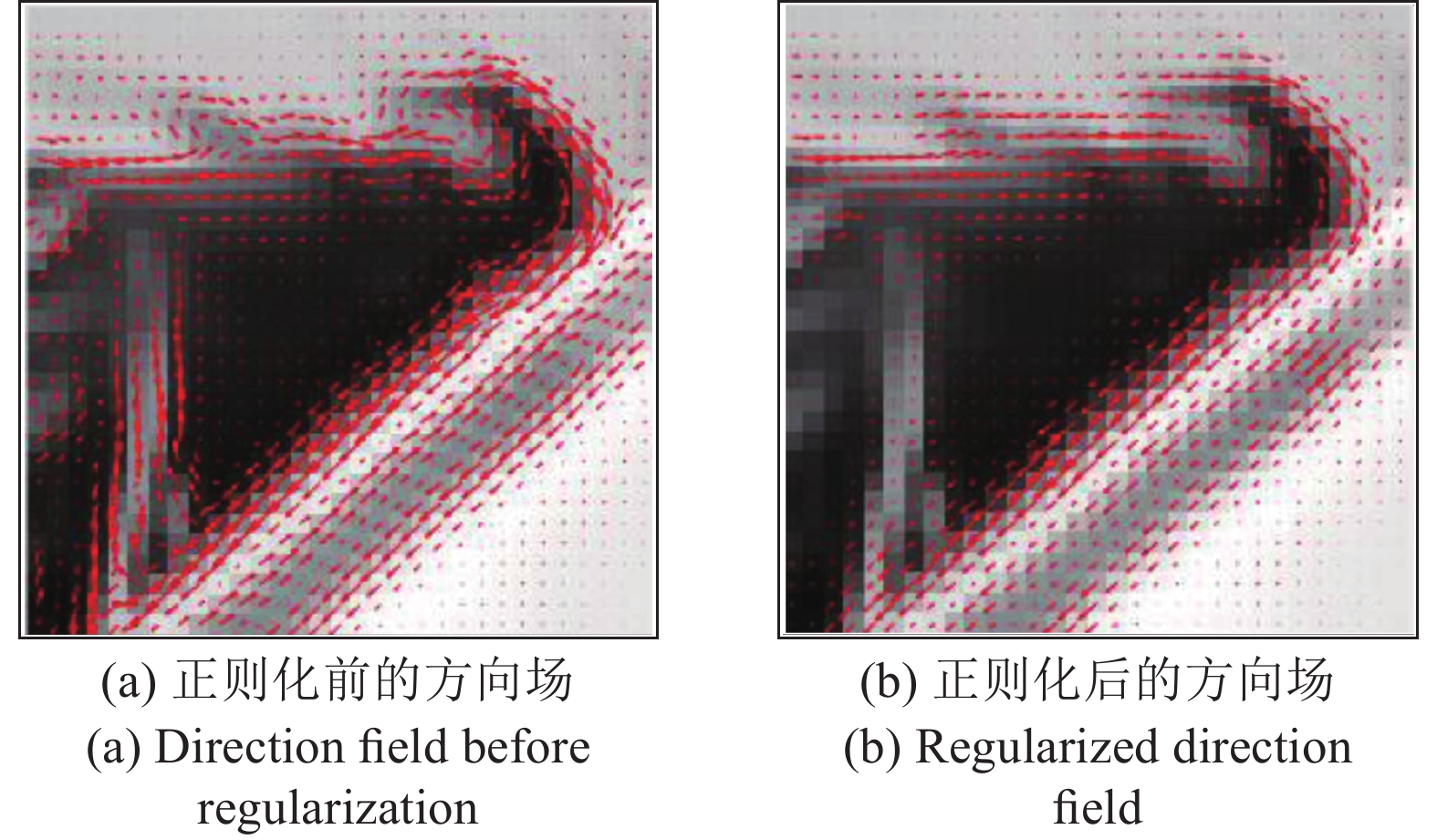
图 7 方向场正则化效果图
(注: 为了使正则化的效果可视, 对方向场进行降维处理且只在Lena局部区域上显示)
Fig. 7 Directional field regularization effect map
(Note: In order to make the regularization effect visible, the direction field is dimension-reduced and displayed only on the local area of Lena)
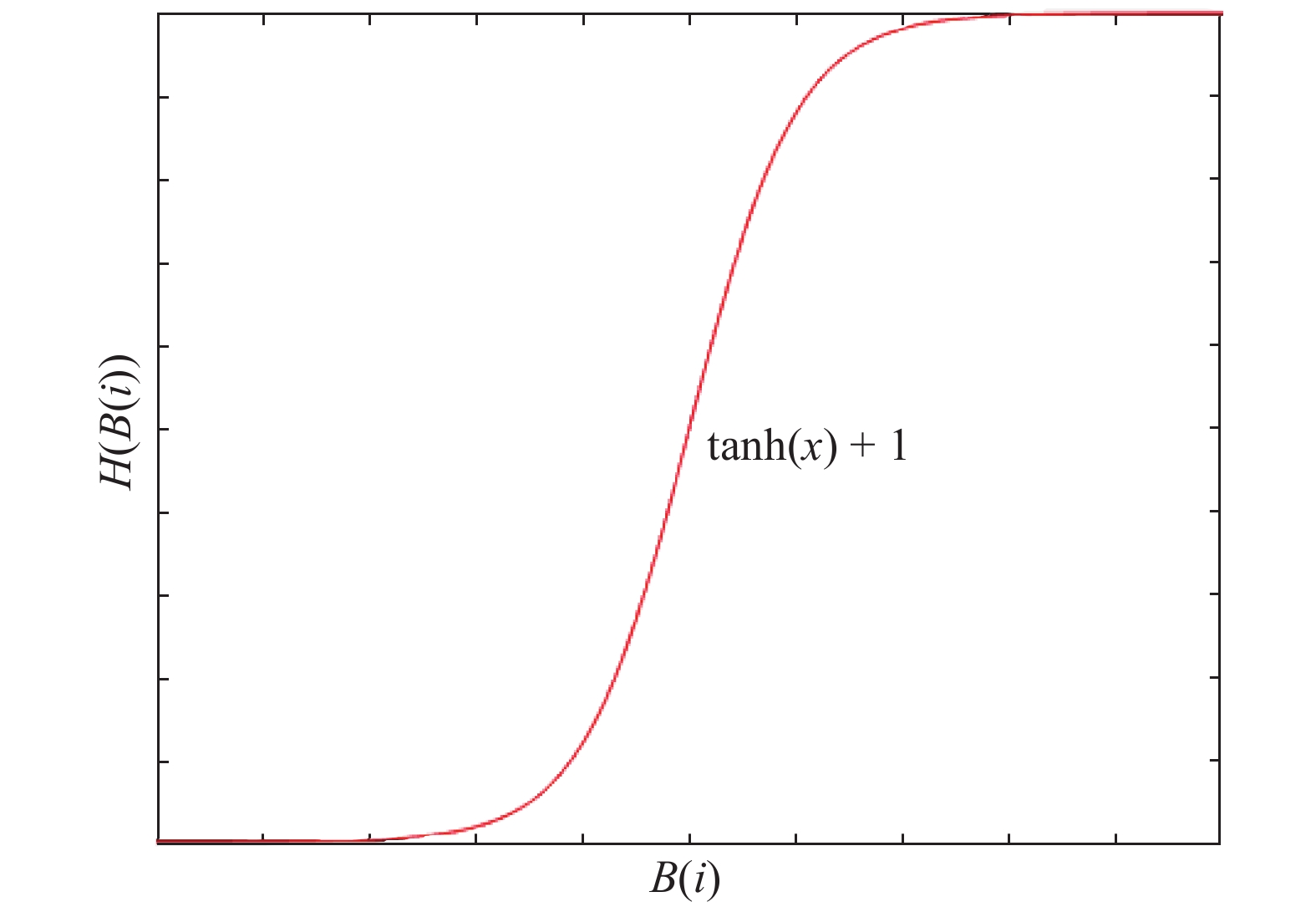
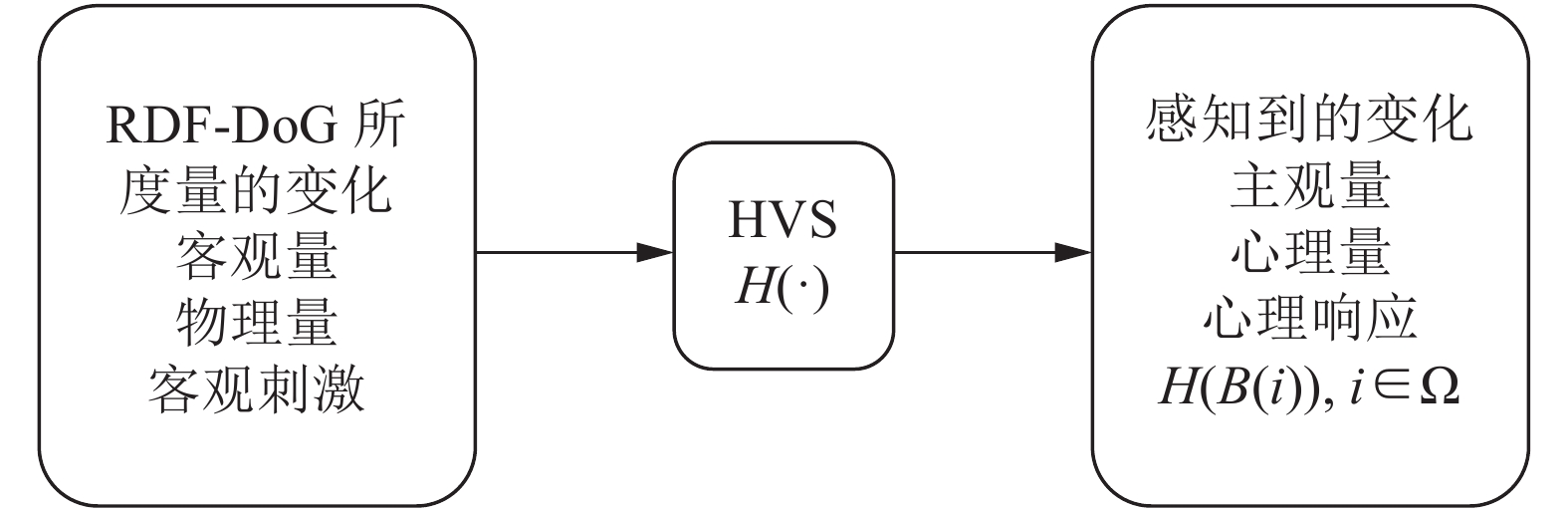
图 10 客观灰度变化与感知到的变化之间的关系
Fig. 10 The relationship between objective grayscale changes and perceived changes
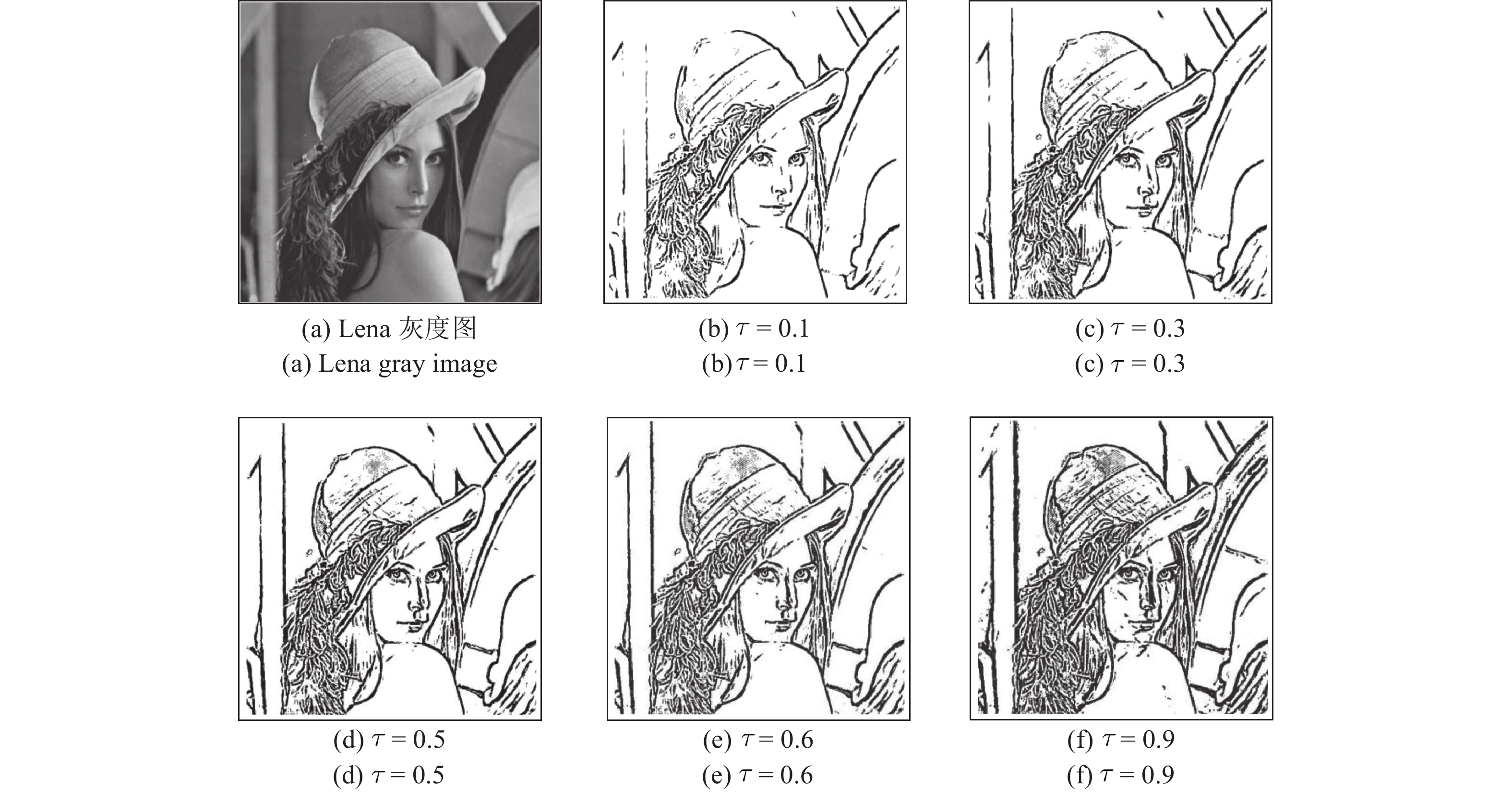
图 11 Lena图像在不同参数
$\tau$ 时的线描画Fig. 11 Line drawing of Lena images at different parameters
$\tau$ -
[1] Pandey R K, Karmakar S, Ramakrishnan A G. Computationally efficient approaches for image style transfer. arXiv preprint. arXiv: 1807.05927, 2018. [2] Decaudin P. Cartoon-looking rendering of 3D-scenes. INRIA, 1996. [3] DeCarlo D, Santella A. Stylization and abstraction of photographs. In: Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques. New York, USA: TOG, 2002, 21(3): 769−776 [4] Santella A, DeCarlo D. Visual interest and npr: an evaluation and manifesto. In: Proceedings of the 3rd International Symposium on Non-Photorealistic Animation and Rendering. New York, USA: ACM Press, 2004. 71−78 [5] Kyprianidis J E, Döllner J. Image abstraction by structure adaptive filtering. In: Proceedings of the 6th Theory and Practice of Computer Graphics Conference. Manchester, UK: TPCG, 2008. 51−58 [6] Kang H, Lee S, Chui C K. Flow-based image abstraction. IEEE Transactions on Visualization Computer Graphics, 2009, 15(1): 62−76 doi: 10.1109/TVCG.2008.81 [7] Qian W H, Xu D, Yue K, Guan Z. Image abstraction painting of flow-like stylization. Tehnicki Vjesnik, 2015, 22(4): 837−844 doi: 10.17559/TV [8] Gatys L A, Ecker A S, Bethge M. Image style transfer using convolutional neural networks. In: Proceedings of the 2016 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016. 2414−2423 [9] Johnson J, Alahi A, Li F F. Perceptual losses for real-time style transfer and super-resolution. In: Proceedings of the 14th European Conference on Computer Vision. Amsterdam, Netherlands: Springer, 2016. 694−711 [10] Ulyanov D, Lebedev V, Vedaldi A, Lempitsky V. Texture networks: feed-forward synthesis of textures and stylized images. In: Proceedings of the 33rd International Conference on Machine Learning. New York, USA. 2016. 1(2): 4 [11] Elad M, Milanfar P. Style-transfer via texture-synthesis. IEEE Transactions on Image Processing, 2017, 26(5): 2338−2351 doi: 10.1109/TIP.2017.2678168 [12] Kwatra V, Essa I, Bobick A. Texture optimization for example-based synthesis. ACM Transactions on Graphics (ToG), ACM, 2005, 24(3): 795−802 doi: 10.1145/1073204 [13] Buades A, Coll B, Morel J M. A non-local algorithm for image denoising. In: Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, USA: IEEE, 2005. 60−65 [14] Horn R A and Johnson C R. Matrix Analysis. New York: Cambridge University Press, 2012. [15] Marr D, Hildreth E. Theory of edge detection. Proceedings of the Royal Society B: Biological Sciences, 1980, 207(1167): 187−217 [16] Winnemöller H, Olsen S C, Gooch B. Real-time video abstraction. In: Proceedings of the 2006 ACM Siggraph Papers. New York, USA: TOG, 2006. 25(3): 1221−1226 -

 下载:
下载:




计量
- 文章访问数: 1028
- HTML全文浏览量: 249
- PDF下载量: 136
- 被引次数: 0
