

Backstepping-based Output Feedback Boundary Control for Coupled Fractional Reaction-diffusion Systems
-
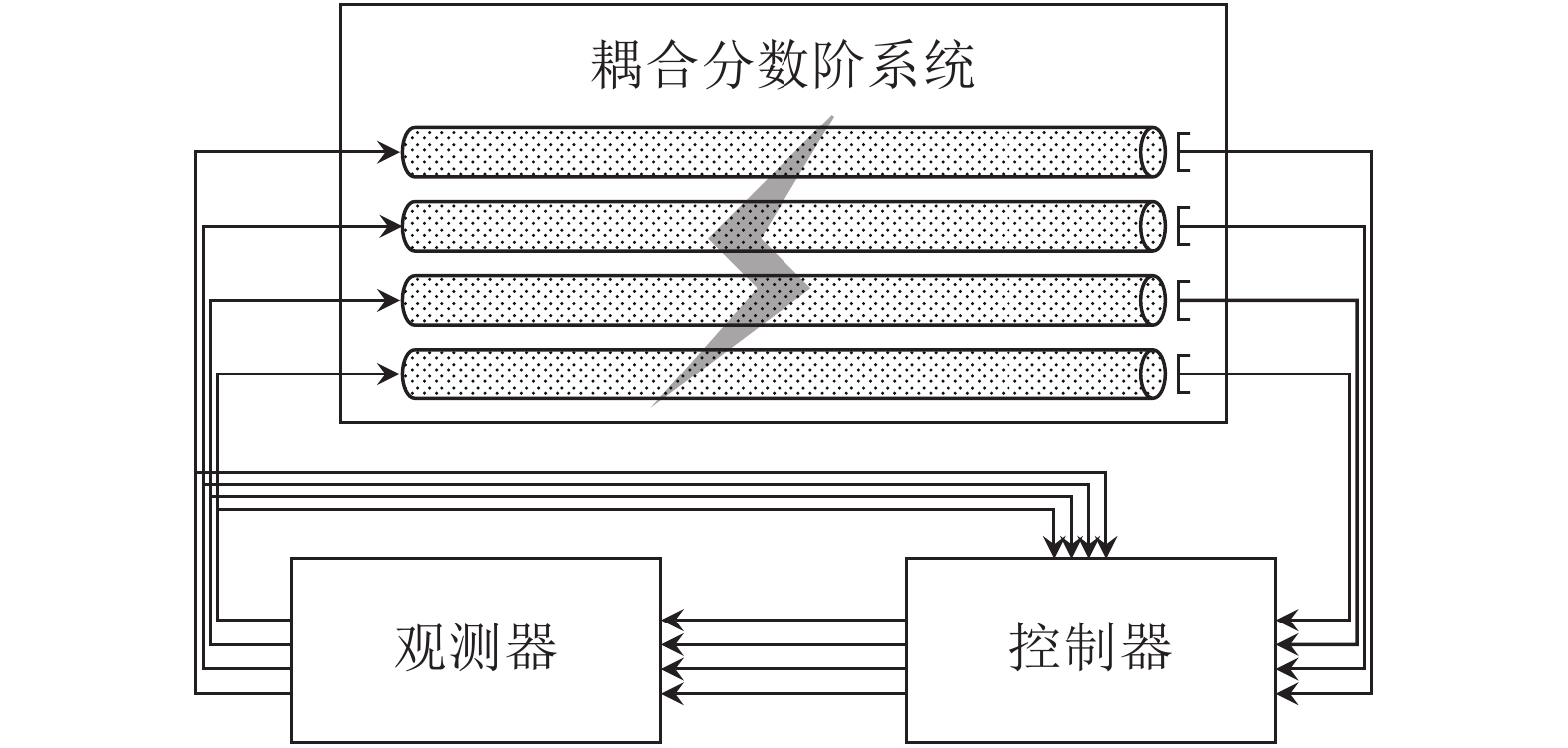
摘要: 针对具有空间依赖耦合系数的分数阶反应扩散系统, 利用反步法设计了基于观测器的边界输出反馈控制器, 证明了观测增益和控制增益核函数矩阵方程的适定性. 针对误差系统和输出反馈的闭环系统, 利用分数阶Lyapunov方法分析了系统的Mittag-Leffler稳定性, 且利用Wirtinger不等式改进了耦合系统稳定的条件. 当系统具有空间依赖的耦合系数时, 难以求得控制增益和观测增益核函数的解析解, 为此, 给出了核函数偏微分方程的数值解方法. 数值仿真验证了理论结果.Abstract: An observer-based boundary output feedback controller is designed by backstepping method for fractional reaction-diffusion systems with space-dependent coupling coefficients. The well-posednesses are proved for the kernel function matrix equations of the observer gains and control gains. For the error system and close-loop system of output feedback, the Mittag-Leffler stabilities of the systems are analyzed by the fractional Lyapunov method, and the stability conditions of the coupled systems are improved by using the Wirtinger's inequality. For the system with spatially-varying coupling coefficients, it is difficult to obtain analytical solutions of the kernel functions for the controller and the observer. Therefore, numerical methods of partial differential equations of the kernel functions are given. Numerical simulations verify the theoretical results.
-
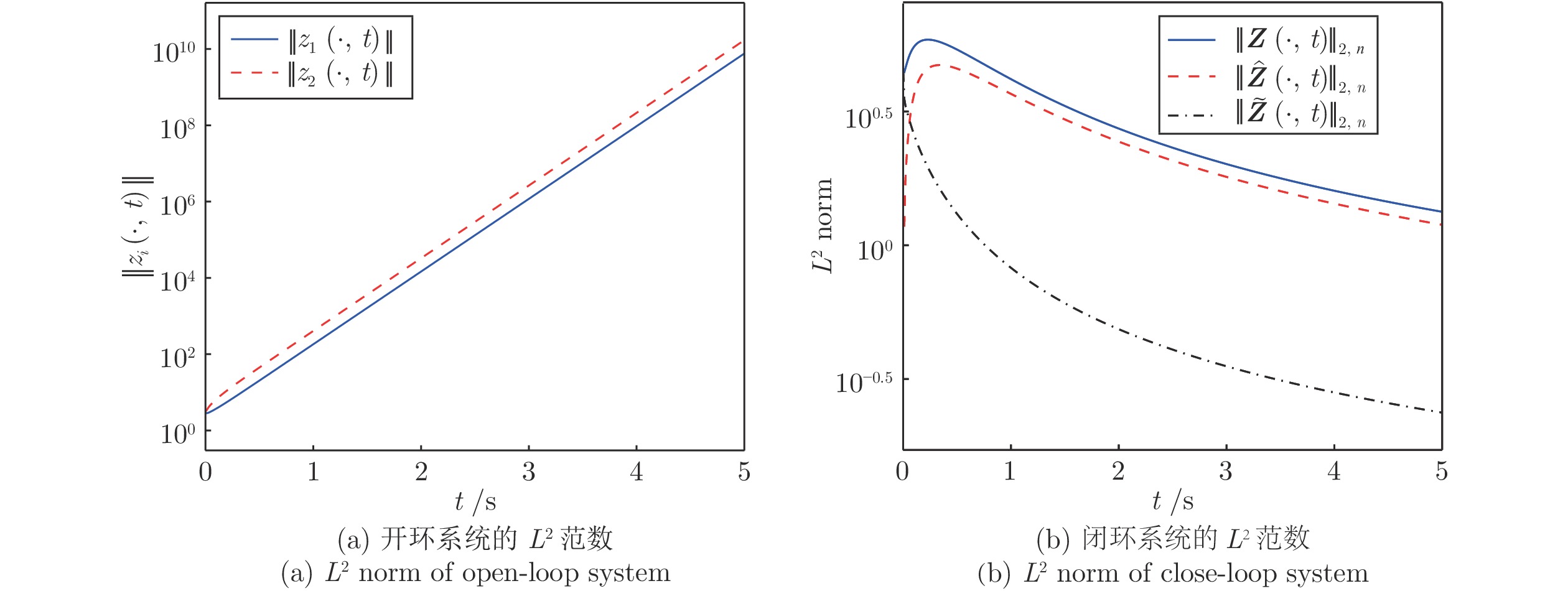
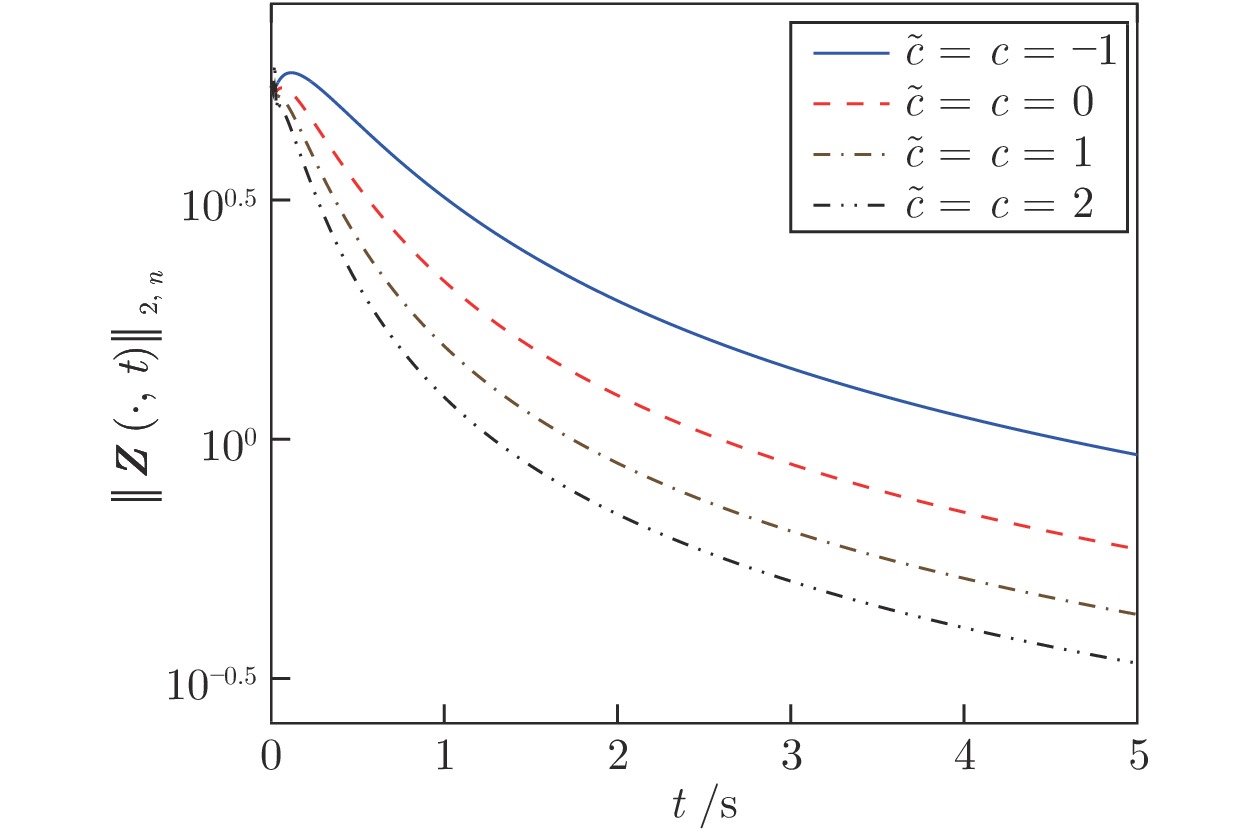
图 2 开环和闭环系统的状态
$ L^2 $ 范数Fig. 2 The state
$ L^2 $ norm of open-loop and close-loop systems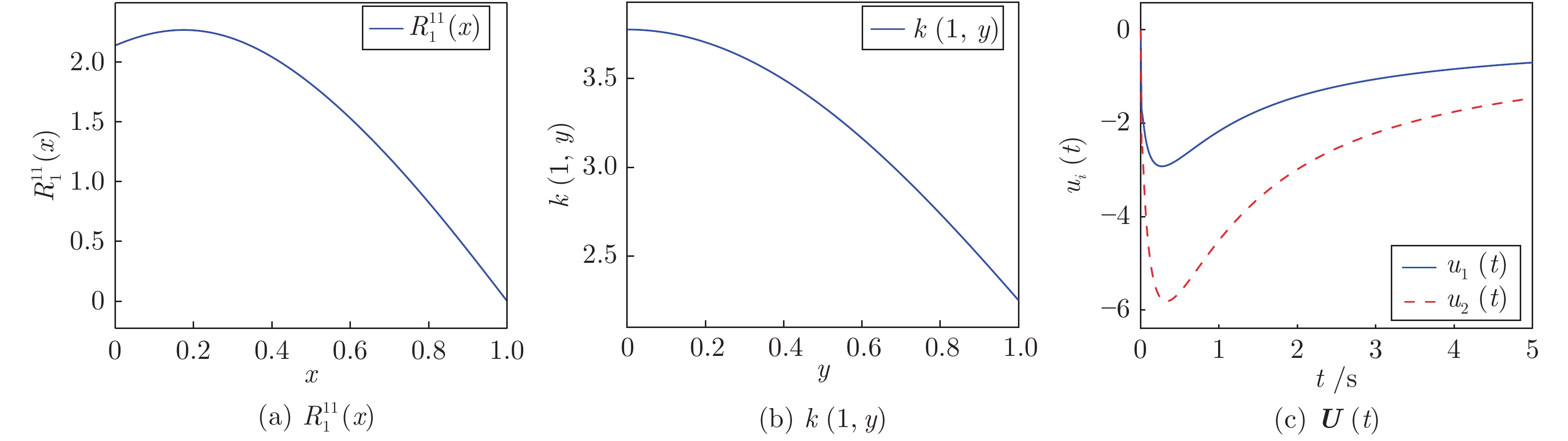
图 3 观测增益, 控制增益核函数和控制输入
Fig. 3 The observer gain and control gain kernel functions, and control input
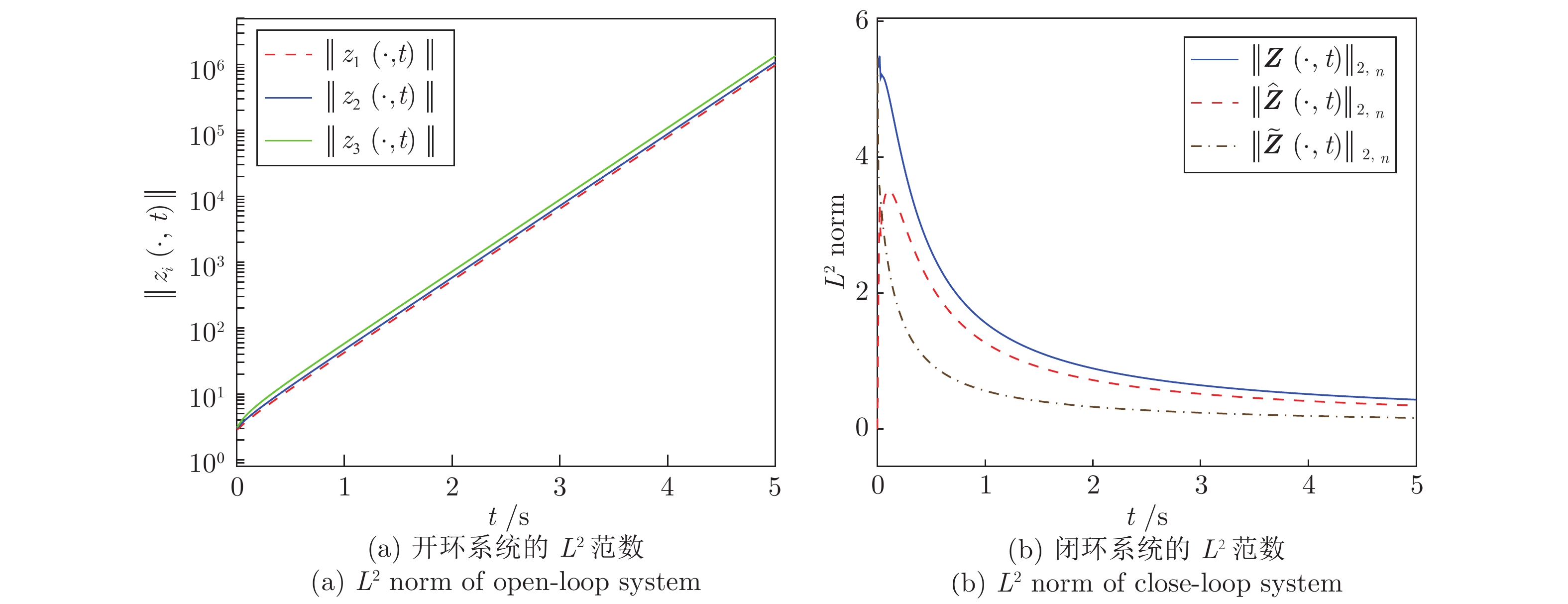
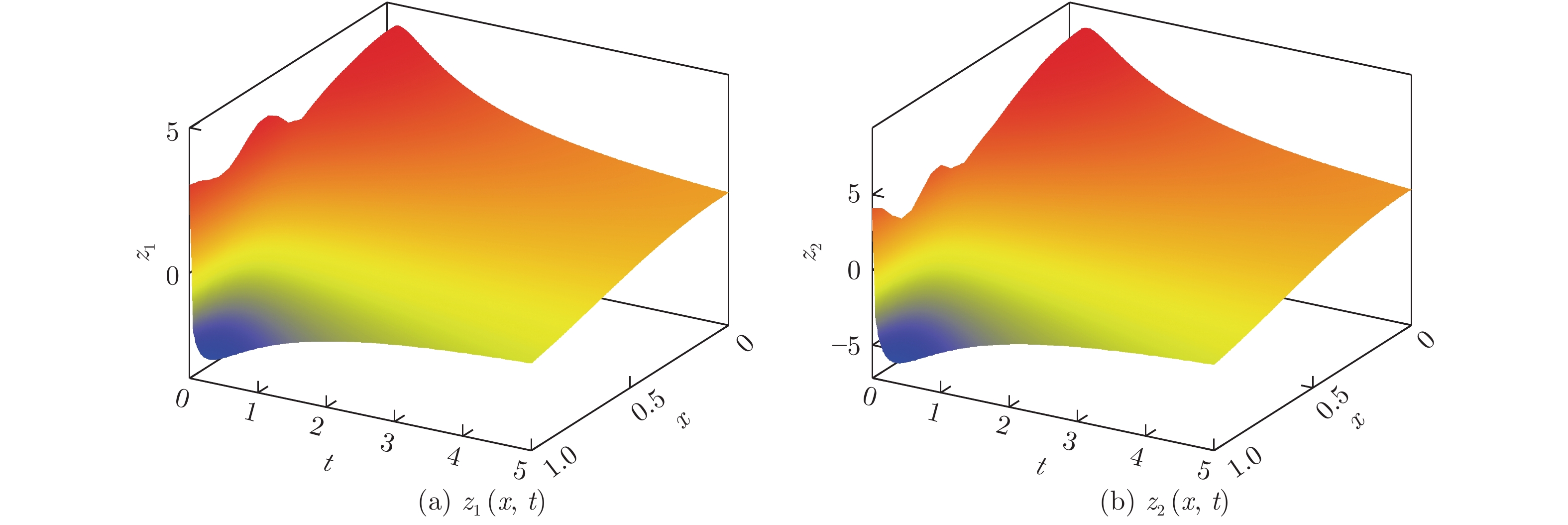
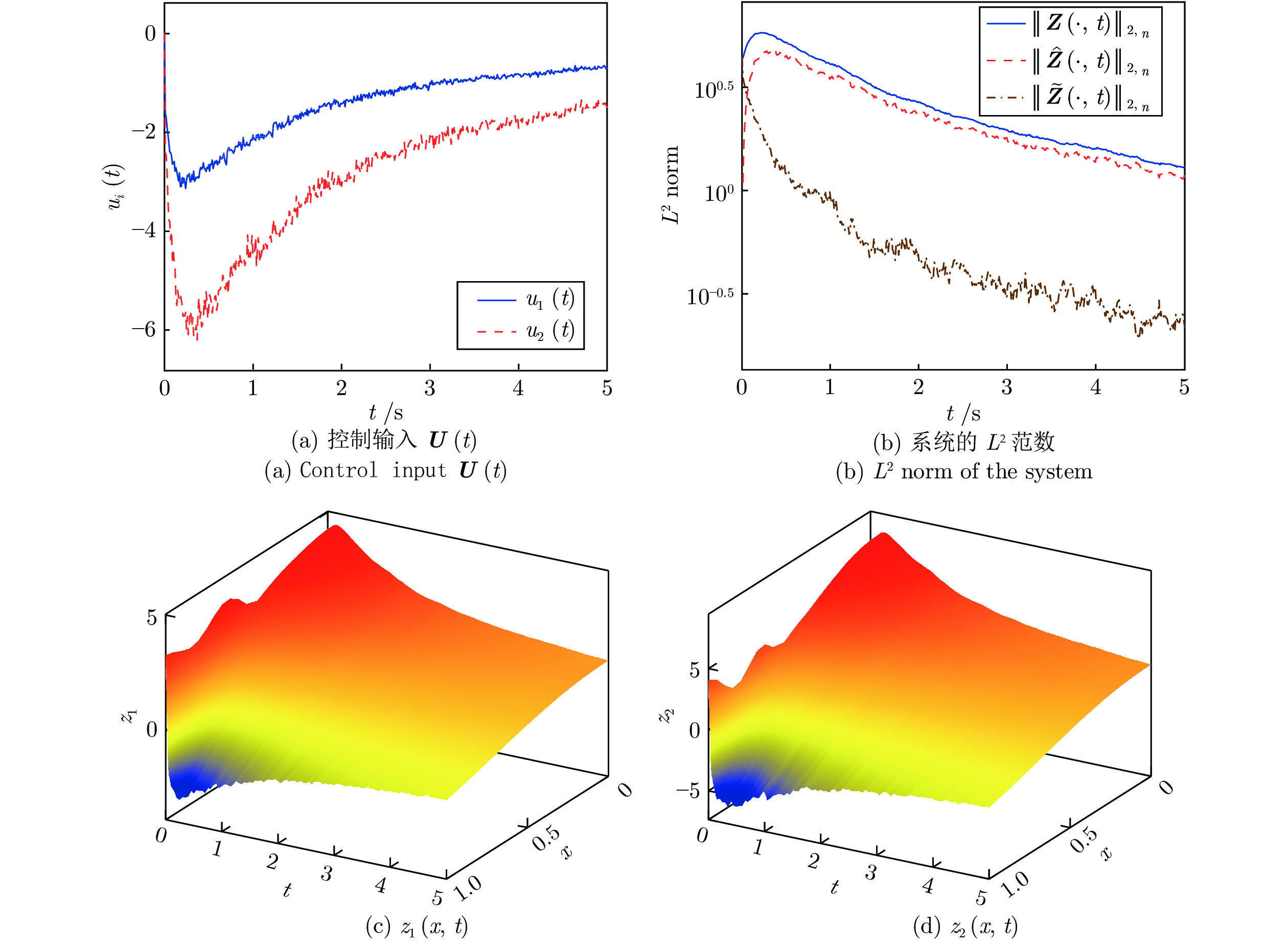
图 6 开环和闭环系统的状态
$ L^2 $ 范数Fig. 6 The state
$ L^2 $ norm of open-loop and close-loop systems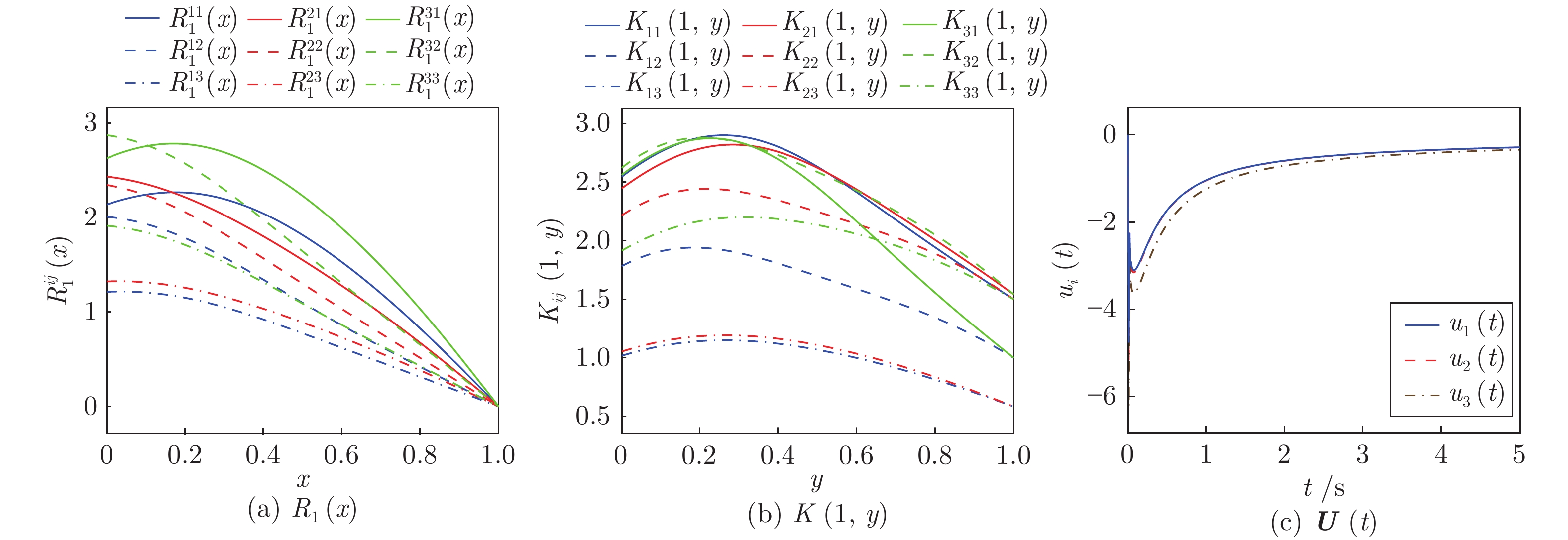
图 7 观测增益, 控制增益核函数和控制输入
Fig. 7 The observer gain and control gain kernel functions, and control input
-
[1] Saxena R K, Mathai A M, Haubold H J. Fractional reactiondiffusion equations. Astrophysics and Space Science, 2006, 305(3):289-296 doi: 10.1007/s10509-006-9189-6 [2] Henry B I, Langlands T A M, Wearne S L. Anomalous diffusion with linear reaction dynamics: From continuous time random walks to fractional reaction-diffusion equations. Physical Review E, 2006, 74(3):031116 doi: 10.1103/PhysRevE.74.031116 [3] Podlubny I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and some of Their Applications. New York: Academic Press, 1999. [4] del Castillo-Negrete D, Carreras B A, Lynch V E. Front dynamics in reaction-diffusion systems with Levy flights: a fractional diffusion approach. Physical Review Letters, 2003, 91:018302 doi: 10.1103/PhysRevLett.91.018302 [5] 张桂梅, 孙晓旭, 刘建新, 储珺. 基于分数阶微分的TV-L1光流模型的图像配准方法研究. 自动化学报, 2017, 43(12):2213-2224Zhang Gui-Mei, Sun Xxiao-Xu, Liu Jian-Xin, Chu Jun. Research on TV-L1 optical flow model for image registration based on fractional-order differentiation. Acta Automatica Sinica, 2017, 43(12):2213-2224 [6] Yin H W, Wen X Q. Pattern formation through temporal fractional derivatives. Scientific Reports, 2018, 8(1):5070 doi: 10.1038/s41598-018-23470-8 [7] Liu W J. Boundary feedback stabilization of an unstable heat equation. SIAM Journal on Control & Optimization, 2003, 42(3):1033-1043 [8] Smyshlyaev A, Krstic M. Closed-form boundary state feedbacks for a class of 1-D partial integro-differential equations. IEEE Transactions on Automatic Control, 2004, 49(12): 2185-2202 doi: 10.1109/TAC.2004.838495 [9] Smyshlyaev A, Krstic M. Backstepping observers for a class of parabolic PDEs. Systems & Control Letters, 2005, 54(7): 613-625 [10] Smyshlyaev A, Krstic M. On control design for PDEs with space-dependent diffusivity or time-dependent reactivity. Automatica, 2005, 41(9):1601-1608 doi: 10.1016/j.automatica.2005.04.006 [11] Krstic B M, Smyshlyaev A. Boundary Control of PDEs: A Course on Backstepping Design. Philadelphia: Society for Industrial and Applied Mathematics, 2008. [12] Smyshlyaev A. Adaptive Control of Parabolic PDEs. Princeton: Princeton University Press, 2010. [13] Baccoli A, Pisano A, Orlov Y. Boundary control of coupled reaction-diffusion processes with constant parameters. Automatica, 2015, 54:80-90 doi: 10.1016/j.automatica.2015.01.032 [14] Baccoli A, Pisano A. Anticollocated backstepping observer design for a class of coupled reaction-diffusion PDEs. Journal of Control Science and Engineering, 2015, 2015:1-10 [15] Liu B N, Boutat D, Liu D Y. Backstepping observer-based output feedback control for a class of coupled parabolic PDEs with different diffusions. Systems & Control Letters, 2016, 97:61-69 [16] Orlov Y, Pisano A, Pilloni A, Usia E. Output feedback stabilization of coupled reaction-diffusion processes with constant parameters. SIAM Journal on Control and Optimization, 2017, 55(6):4112-4155 doi: 10.1137/15M1034325 [17] Vazquez R, Krstic M. Boundary control of coupled reactionadvection-diffusion systems with spatially-varying coefficients. IEEE Transactions on Automatic Control, 2017, 62(4):2026-2033 doi: 10.1109/TAC.2016.2590506 [18] Deutscher J, Kerschbaum S. Output regulation for coupled linear parabolic PIDEs. Automatica, 2019, 100:360-370 doi: 10.1016/j.automatica.2018.11.033 [19] Ge F D, Chen Y Q, Kou C H. Boundary feedback stabilisation for the time fractional-order anomalous diffusion system. IET Control Theory & Applications, 2016, 10(11):1250-1257 [20] Ge F D, Chen Y Q. Extended Luenberger-type observer for a class of semilinear time fractional diffusion systems. Chaos, Solitons & Fractals, 2017, 102:229-235 [21] Ge F D, Meurer T, Chen Y. Mittag-Leffler convergent backstepping observers for coupled semilinear subdiffusion systems with spatially varying parameters. Systems & Control Letters, 2018, 122:86-92 [22] Ge F D, Chen Y Q. Observer design for semilinear time fractional diffusion systems with spatially varying parameters. In: Proceedings of the 2018 International Conference on Fractional Differentiation and Its Applications. Amman, Jordan: SSRN, 2018. [Online], available: http://dx.doi.org/10.2139/ssrn.3281639 [23] Ge F D, Chen Y Q. Event-triggered boundary feedback control for networked reaction-subdiffusion processes with input uncertainties. Information Sciences, 2019, 476:239-255. doi: 10.1016/j.ins.2018.10.023 [24] Chen J, Zhuang B, Chen Y Q, Cui B T. Backstepping-based boundary feedback control for a fractional reaction diffusion system with mixed or Robin boundary conditions. IET Control Theory & Applications, 2017, 11(17):2964-2976. [25] Chen J, Cui B T, Chen Y Q, Mao L. Backstepping-based observer for output feedback stabilization of a boundary controlled fractional reaction diffusion system. In: Proceedings of the 11th Asian Control Conference. Gold Coast, Australia: IEEE, 2017. 2435−2440 [26] Chen J, Cui B T, Chen Y Q. Backstepping-based boundary control design for a fractional reaction diffusion system with a space-dependent diffusion coefficient. ISA Transactions, 2018, 80:203-211 doi: 10.1016/j.isatra.2018.04.013 [27] Chen J, Cui B T, Chen Y Q. Observer-based output feedback control for a boundary controlled fractional reaction diffusion system with spatially-varying diffusivity. IET Control Theory & Applications, 2018, 12(11):1561-1572 [28] Zhou H C, Guo B Z. Boundary feedback stabilization for an unstable time fractional reaction diffusion equation. SIAM Journal on Control and Optimization, 2018, 56(1):75-101 doi: 10.1137/15M1048999 [29] Li Y, Chen Y Q, Podlubny I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica, 2009, 45(8):1965-1969 doi: 10.1016/j.automatica.2009.04.003 [30] Li Y, Chen Y Q, Podlubny I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Computers & Mathematics with Applications, 2010, 59(5):1810-1821 [31] Hardy G H, Littlewood J E, Pólya G. Inequalities. 2nd ed. Cambridge, UK: Cambridge University Press, 1988. [32] Podlubny I. Fractional-order systems and PIλDµ-controllers. IEEE Transactions on Automatic Control, 1999, 44(1):208-214 doi: 10.1109/9.739144 [33] Matignon D. Stability results for fractional differential equations with applications to control processing. Computational Engineering in Systems Applications, 1996, 2:963-968 [34] Aguila-Camacho N, Duarte-Mermoud M A, Gallegos J A. Lyapunov functions for fractional order systems. Communications in Nonlinear Science & Numerical Simulation, 2014, 19(9):2951-2957 [35] Curtain R F, Zwart H. An Introduction to Infinitedimensional Linear Systems Theory. New York: Springer Science and Business Media, 1995. [36] Li H F, Cao J X, Li C P. High-order approximation to Caputo derivatives and Caputo-type advection-diffusion equations (III). Journal of Computational and Applied Mathematics, 2016, 299:159-175 doi: 10.1016/j.cam.2015.11.037 -

 下载:
下载:








计量
- 文章访问数: 708
- HTML全文浏览量: 591
- PDF下载量: 236
- 被引次数: 0
