

-
摘要: 研究了控制信号被恶意篡改的信息物理系统的安全控制问题. 首先, 提出一种改进果蝇优化核极限学习机算法(Kernel extreme learning machine with improved fruit fly optimization algorithm, IFOA-KELM)对攻击信号进行重构. 然后, 将所得重构信号作为系统扰动加以补偿, 进而设计模型预测控制策略, 并给出了使被控系统是输入到状态稳定的条件. 另外, 本文从攻击者角度建立优化模型得到最优攻击策略用以生成足够的受攻击数据, 基于此数据, 来训练改进果蝇优化核极限学习机算法. 最后, 使用弹簧−质量−阻尼系统进行仿真, 验证了改进果蝇优化极限学习机算法和所提安全控制策略的有效性.Abstract: This paper investigates the security control problem of cyber-physical systems whose control signals are maliciously tampered. Firstly, a kernel extreme learning machine with improved fruit fly optimization (IFOA-KELM) algorithm is proposed to reconstruct the attack signal. Secondly, with the reconstructed signal treated as disturbance, a model predictive control strategy is designed to secure the system, and a condition that guarantees the input-to-state stability of the attacked system is given. In addition, to train the proposed algorithm, enough data of the system attacked with an optimal strategy is generated. This strategy is obtained by solving an optimization problem from the attacker' s perspective. Finally, a numerical example of the spring-mass-damping system is illustrated to verify the effectiveness of the IFOA-KELM algorithm and the proposed control strategy.
-
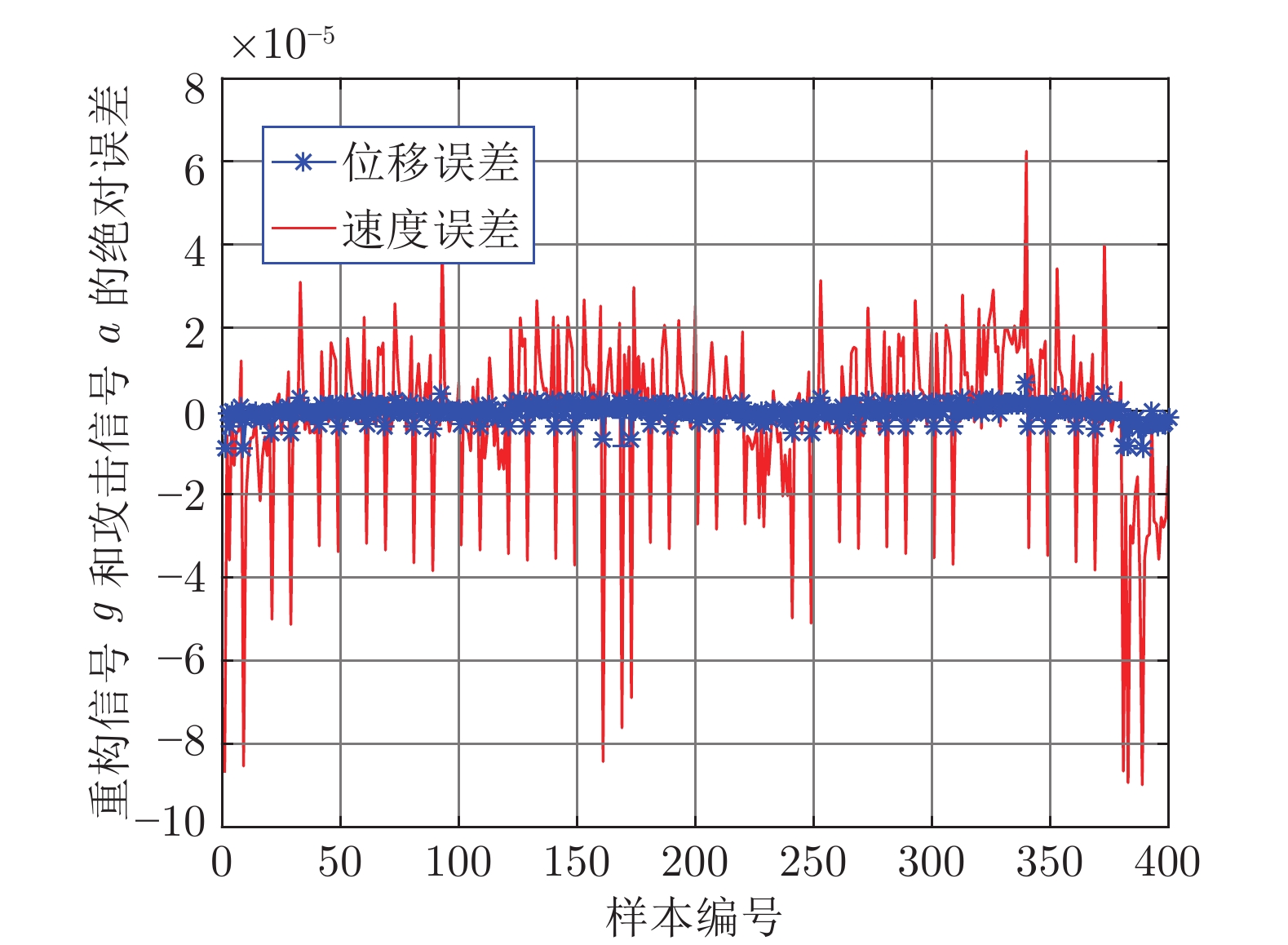
图 8 IFOA-KELM测试样本绝对误差
Fig. 8 The error between the real attack and the attack learned by IFOA-KELM
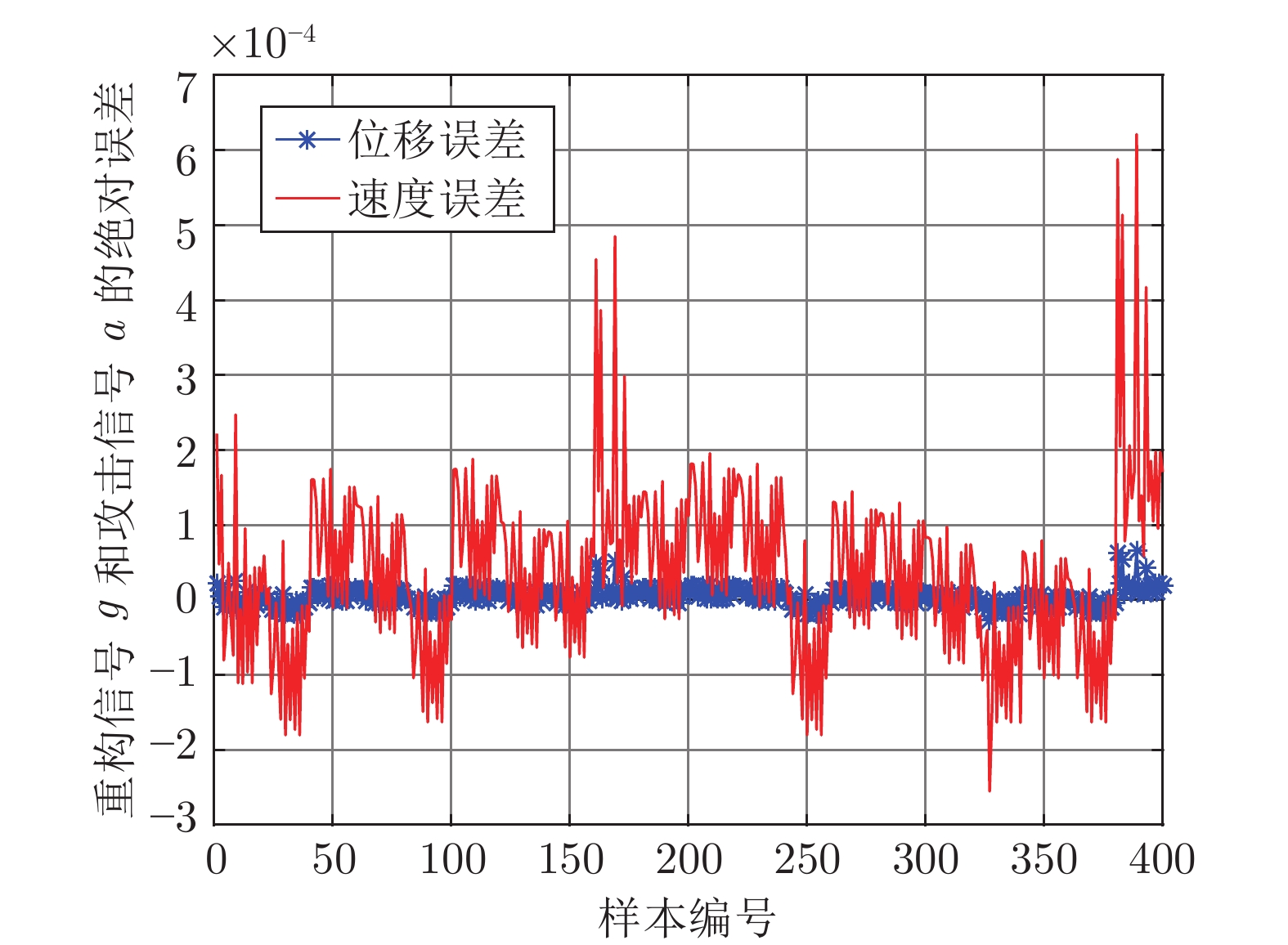
图 11 LSSVM测试样本绝对误差
Fig. 11 The error between the real attack and the attack learned by LSSVM
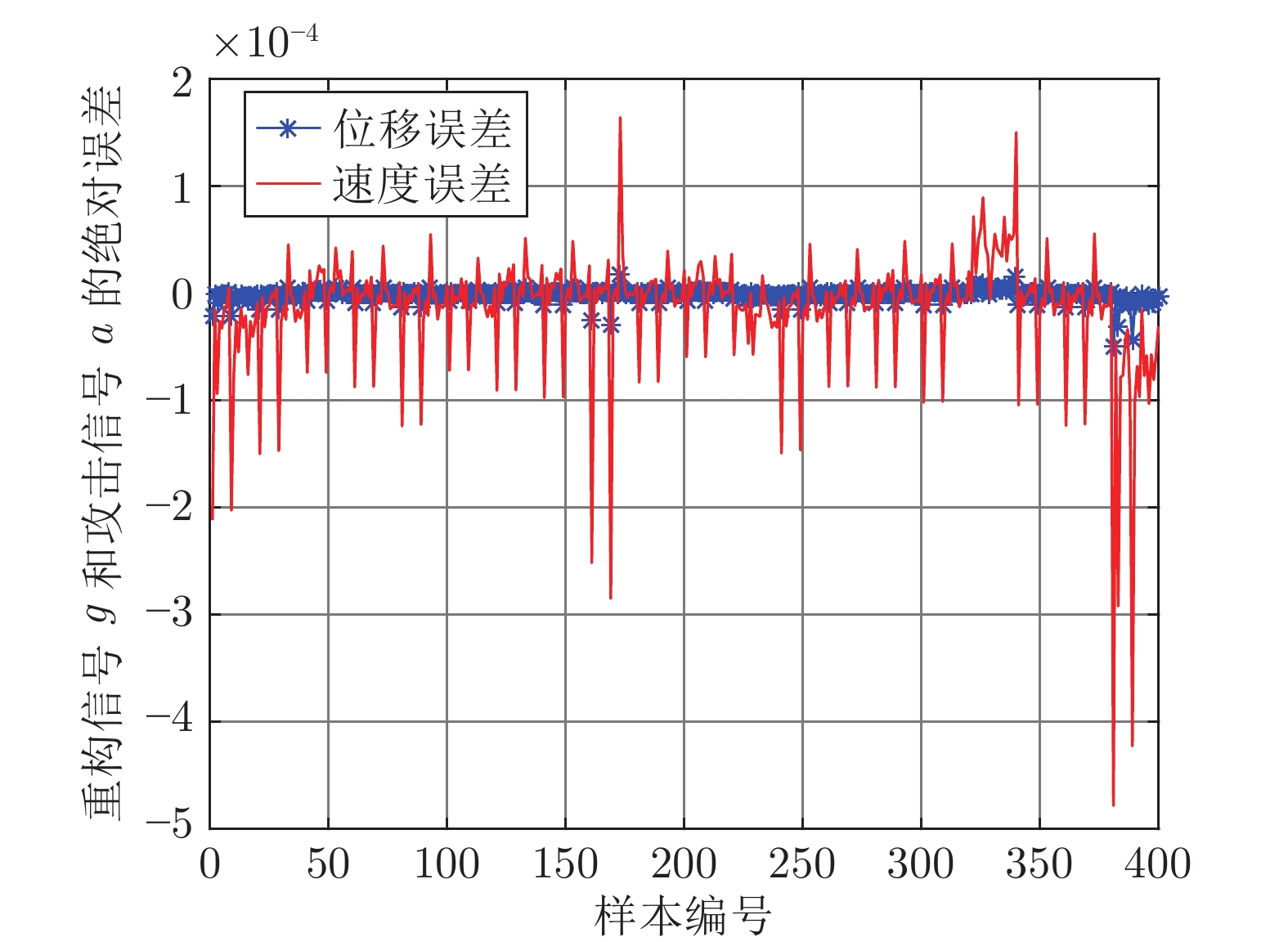
图 9 FOA-KELM测试样本绝对误差
Fig. 9 The error between the real attack and the attack learned by FOA-KELM
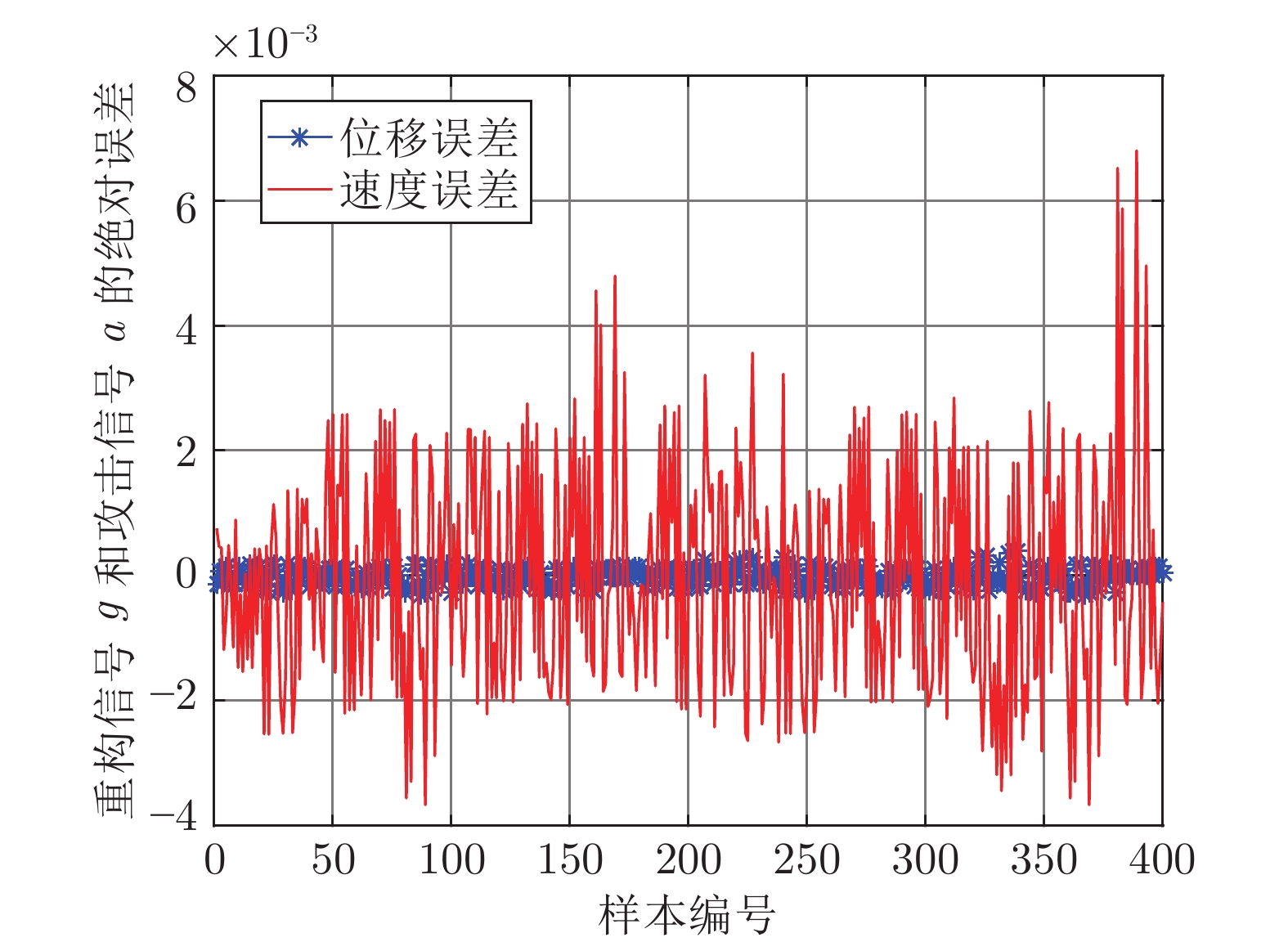
图 10 PSO-BP测试样本绝对误差
Fig. 10 The error between the real attack and the attack learned by PSO-BP
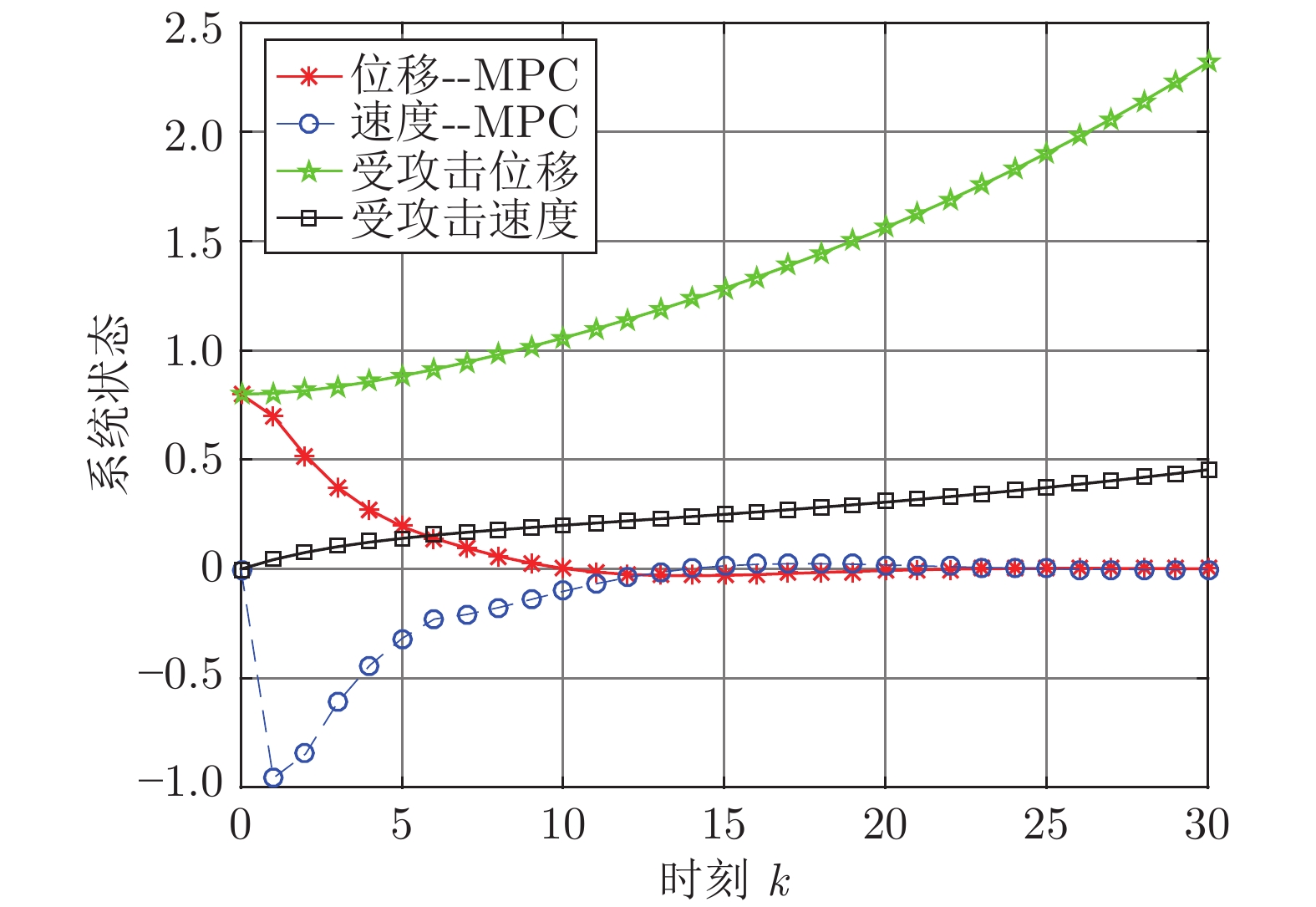
图 13 受攻击系统引入MPC前后的状态轨迹
Fig. 13 The state trajectory of the attacked system with MPC and without MPC
-
[1] Lee J, Bagheri B, Kao H A. A cyber-physical systems architecture for industry 4.0-based manufacturing systems. Manufacturing Letters, 2015, 3: 18−23 doi: 10.1016/j.mfglet.2014.12.001 [2] 李洪阳, 魏慕恒, 黄洁, 邱伯华, 赵晔, 骆文城, 何晓, 何潇. 信息物理系统技术综述. 自动化学报, 2019, 45(1): 37−50Li Hong-Yang, Wei Mu-Heng, Huang Jie, Qiu Bo-Hua, Zhao Ye, Luo Wen-Cheng, He Xiao, He Xiao. Survey on cyber-physical systems. Acta Automatica Sinica, 2019, 45(1): 37−50 [3] Inoue J, Yamagata Y, Chen Y, Poskitt C, Sun J. Anomaly detection for a water treatment system using unsupervised machine learning. In: Proceedings of the 2017 IEEE International Conference on Data Mining Workshops. New Orleans, LA, USA: IEEE, 2017. 1058−1065 [4] Li D, Chen D C, Goh J, Ng S K. Anomaly detection with generative adversarial networks for multivariate time series. arXiv: 1809.04758, 2018. [5] He H B, Yan J. Cyber-physical attacks and defences in the smart grid: A survey. IET Cyber-Physical Systems: Theory and Applications, 2016, 1(1): 13−27 [6] 夏元清, 闫策, 王笑京, 宋向辉. 智能交通信息物理融合云控制系统. 自动化学报, 2019, 45(1): 132−142Xia Yuan-Qing, Yan Ce, Wang Xiao-Jing, Song Xiang-Hui. Intelligent transportation cyber-physical cloud control systems. Acta Automatica Sinica, 2019, 45(1): 132−142 [7] Wang H J, Zhao H T, Zhang J, Ma D T. Survey on unmanned aerial vehicle networks: A cyber physical system perspective. arXiv: 1812.06821, 2018. [8] 刘烃, 田决, 王稼舟, 吴宏宇, 孙利民, 周亚东, 沈超, 管晓宏. 信息物理融合系统综合安全威胁与防御研究. 自动化学报, 2019, 45(1): 5−24Liu Ting, Tian Jue, Wang Jia-Zhou, Wu Hong-Yu, Sun Li-Min, Zhou Ya-Dong, Shen Chao, Guan Xiao-Hong. Integrated security threats and defense of cyber-physical systems. Acta Automatica Sinica, 2019, 45(1): 5−24 [9] Wolf M, Serpanos D. Safety and security in cyber-physical systems and internet-of-things systems. Proceedings of the IEEE, 2018, 106(1): 9−20 doi: 10.1109/JPROC.2017.2781198 [10] De Persis C, Tesi P. Input-to-state stabilizing control under denial-of-service. IEEE Transactions on Automatic Control, 2015, 60(11): 2930−2944 doi: 10.1109/TAC.2015.2416924 [11] Liu K, Guo H, Zhang Q R, Xia Y Q. Distributed secure filtering for discrete-time systems under Round-Robin protocol and deception attacks. IEEE Transactions on Cybernetics, 2020, 50(8): 3571−3580 doi: 10.1109/TCYB.2019.2897366 [12] Peng L H, Shi L, Cao X, Sun C Y. Optimal attack energy allocation against remote state estimation. IEEE Transactions on Automatic Control, 2018, 63(7): 2199−2205 doi: 10.1109/TAC.2017.2775344 [13] Zhang Q R, Liu K, Xia Y Q, Ma A Y. Optimal stealthy deception attack against cyber-physical systems. IEEE Transactions on Cybernetics, 2020, 50(9): 3963−3972 doi: 10.1109/TCYB.2019.2912622 [14] Zhu Q Y, Basar T. Game-theoretic methods for robustness, security, and resilience of cyberphysical control systems: Games-in-games principle for optimal cross-layer resilient control systems. IEEE Control Systems Magazine, 2015, 35(1): 46−65 doi: 10.1109/MCS.2014.2364710 [15] Vu N H, Choi Y S, Choi M. DDoS attack detection using K-nearest neighbor classifier method. In: Proceedings of the 4th IASTED International Conference on Telehealth/Assistive Technologies. Baltimore, Maryland, USA, 2008. 248−253 [16] Kumar P G, Devaraj D. Intrusion detection using artificial neural network with reduced input features. ICTACT Journal on Soft Computing, 2010: 30−36 [17] Nawaz R, Shahid M A, Qureshi I M, Mehmood M H. Machine learning based false data injection in smart grid. In: Proceedings of the 1st International Conference on Power, Energy and Smart Grid. Mirpur, Azad Kashmir, Pakistan, 2018. 1−6 [18] Esmalifalak M, Liu L, Nguyen N, Zheng R. Detecting stealthy false data injection using machine learning in smart grid. IEEE Systems Journal, 2017, 11(3): 1644−1652 doi: 10.1109/JSYST.2014.2341597 [19] Kiss I, Genge B, Haller P. A clustering-based approach to detect cyber attacks in process control systems. In: Proceedings of the 13th International Conference on Industrial Informatics. Cambridge, United Kingdom, 2015. 142−148 [20] Yan Z, Wang J. Model predictive control of nonlinear systems with unmodeled dynamics based on feedforward and recurrent neural networks. IEEE Transactions on Industrial Informatics, 2012, 8(4): 746−756 doi: 10.1109/TII.2012.2205582 [21] 封鹏. 基于PSO-BP神经网络的网络流量预测算法的研究与应用[硕士学位论文], 东北大学, 中国, 2015.Feng Peng. Research and Application of Network Traffic Prediction Algorithm Based on PSO-BP Neural Network [Master thesis], Northeastern University, China, 2015. [22] Huang G B, Zhou H M, Ding X J, Zhang R. Extreme learning machine for regression and multiclass classification. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42(2): 513−529 doi: 10.1109/TSMCB.2011.2168604 [23] Huang G B, Zhu Q Y, Siew C K. Extreme learning machine: A new learning scheme of feedforward neural networks. In: Proceedings of the 2004 IEEE International Joint Conference on Neural Networks. Budapest, Hungary: IEEE, 2004. 985−990 [24] Huang G B, Siew C K. Extreme learning machine with randomly assigned RBF kernels. International Journal of Information Technology, 2005, 11(1): 16−24 [25] Minh H Q, Niyogi P, Yao Y. Mercer' s theorem, feature maps, and smoothing. In: Proceedings of the 2006 International Conference on Computational Learning Theory. Berlin, Heidelberg, Germary: Springer, 2006. 154−168 [26] Pan W T. A new fruit fly optimization algorithm: Taking the financial distress model as an example. Knowledge-Based Systems, 2012, 26: 69−74 doi: 10.1016/j.knosys.2011.07.001 [27] Kennedy J, Eberhart R. Particle swarm optimization. In: Proceedings of the 1995 IEEE International Conference on Neural Networks. Perth, Australia, 1995. 1942−1948 [28] 魏立新, 赵默林, 范锐, 周红星. 基于改进鲨鱼优化算法的自抗扰控制参数整定. 控制与决策, 2019, 34(4): 816−820Wei Li-Xin, Zhao Mo-Lin, Fan Rui, Zhou Hong-Xing. Parameter tuning of active disturbance rejection control based on ameliorated shark smell optimization algorithm. Control and Decision, 2019, 34(4): 816−820 [29] Muller S D, Marchetto J, Airaghi S, Kournoutsakos P. Optimizationbased on bacterial chemotaxis. IEEE Transactions on Evolutionary Computation, 2002, 6(1): 16−29 doi: 10.1109/4235.985689 [30] Guliyev N, Ismailov V. On the approximation by single hidden layer feedforward neural networks with fixed weights. Neural Networks, 2018, 98: 296−304 doi: 10.1016/j.neunet.2017.12.007 [31] 戴荔. 分布式随机模型预测控制方法研究[博士学位论文], 北京理工大学, 中国, 2016.Dai Li. Distributed Stochastic Model Predictive Control [Ph.D. dissertation], Beijing Institute of Technology, China, 2016. [32] Liu K, Ma A Y, Xia Y Q, Sun Z Q, Johansson K H. Network scheduling and control co-design for multi-loop MPC. IEEE Transactions on Automatic Control, 2019, 64(12): 5238−5245 doi: 10.1109/TAC.2019.2910724 [33] Marruedo D L, Alamo T, Camacho E F. Input-to-state stable MPC for constrained discrete-time nonlinear systems with bounded additive uncertainties. In: Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas, Nevada, USA, 2002. 4619−4624 [34] 夏元清. 云控制系统及其面临的挑战. 自动化学报, 2016, 42(1): 1−12Xia Yuan-Qing. Cloud control systems and their challenges. Acta Automatica Sinica, 2016, 42(1): 1−12 -

 下载:
下载:







计量
- 文章访问数: 2587
- HTML全文浏览量: 687
- PDF下载量: 861
- 被引次数: 0
