

Automotive Control in Intelligent Era
-
摘要: 自动驾驶是汽车产业发展的重要里程碑. 汽车驾驶自动化一直都在进行, 其发展进程是对驾驶人认知感知、决策规划和执行控制等各个重要环节的逐步增强或最终替代. 智能时代下, 大数据分析、泛在计算、泛在传感和人工智能等颠覆性技术为汽车驾驶自动化向着高级别迈进提供了新的机遇. 控制技术是智能时代汽车自动化进程中的基石, 更多的信息在先进控制技术的赋能下将衍生出更多的新功能与新系统, 从而实现汽车安全性、经济性以及舒适性等各个方面的提升. 本文对智能时代的汽车控制进行综述, 首先回顾汽车自动化的发展进程, 然后探讨汽车自动化进程中面临的问题, 最后梳理出一些未来智能汽车控制发展趋势与关键技术.Abstract: Autonomous driving is recognized as the milestone of automotive industry. The purpose of the continuous evolution of vehicular automation is to enhance or replace human-driver's maneuvers in terms of perception, decision-making and execution. With the advent of featured emerging technologies, such as big data, cloud computation, connectivity and artificial intelligence, vehicles are becoming more and more intelligent, leading to unprecedented opportunities to be promoted towards higher level automation. Being as the cornerstone in the process of vehicular automation in intelligent era, control technologies enable the development of new vehicular systems and extended functionalities to offer improved safety, fuel economy, mobility and comfort. This paper provides an overview of the state of the art on intelligent and automated vehicle in control-domain. First, a brief history of vehicle automation is reviewed. Then, key challenges in the development of the automotive control are discussed. Finally, promising technologies and future research trends in intelligent era are identified.
-
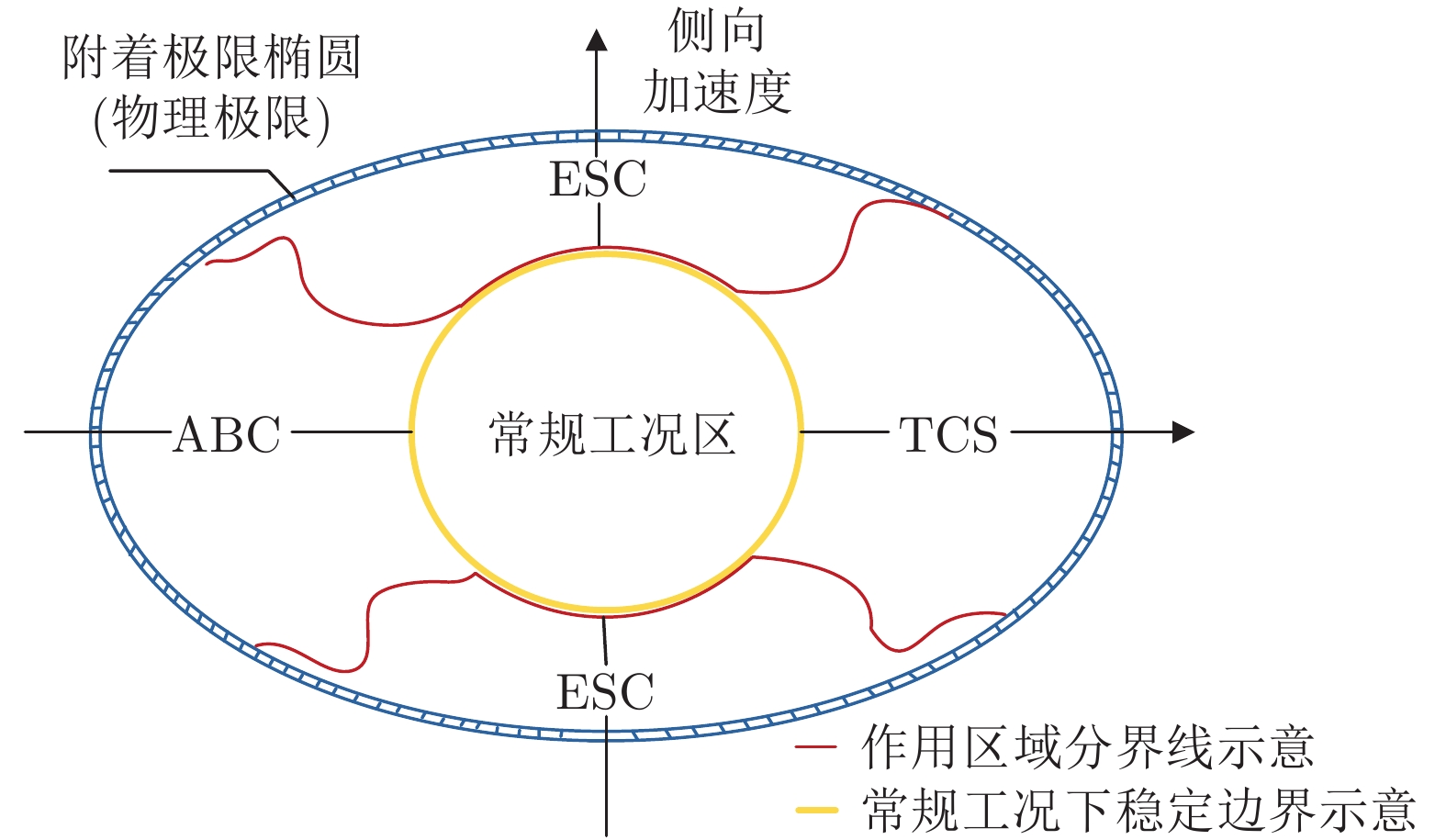
图 3 车辆极限工况示意图 (侧向 − 纵向)
Fig. 3 Schematics of extreme driving condition (lateral-longitudinal)
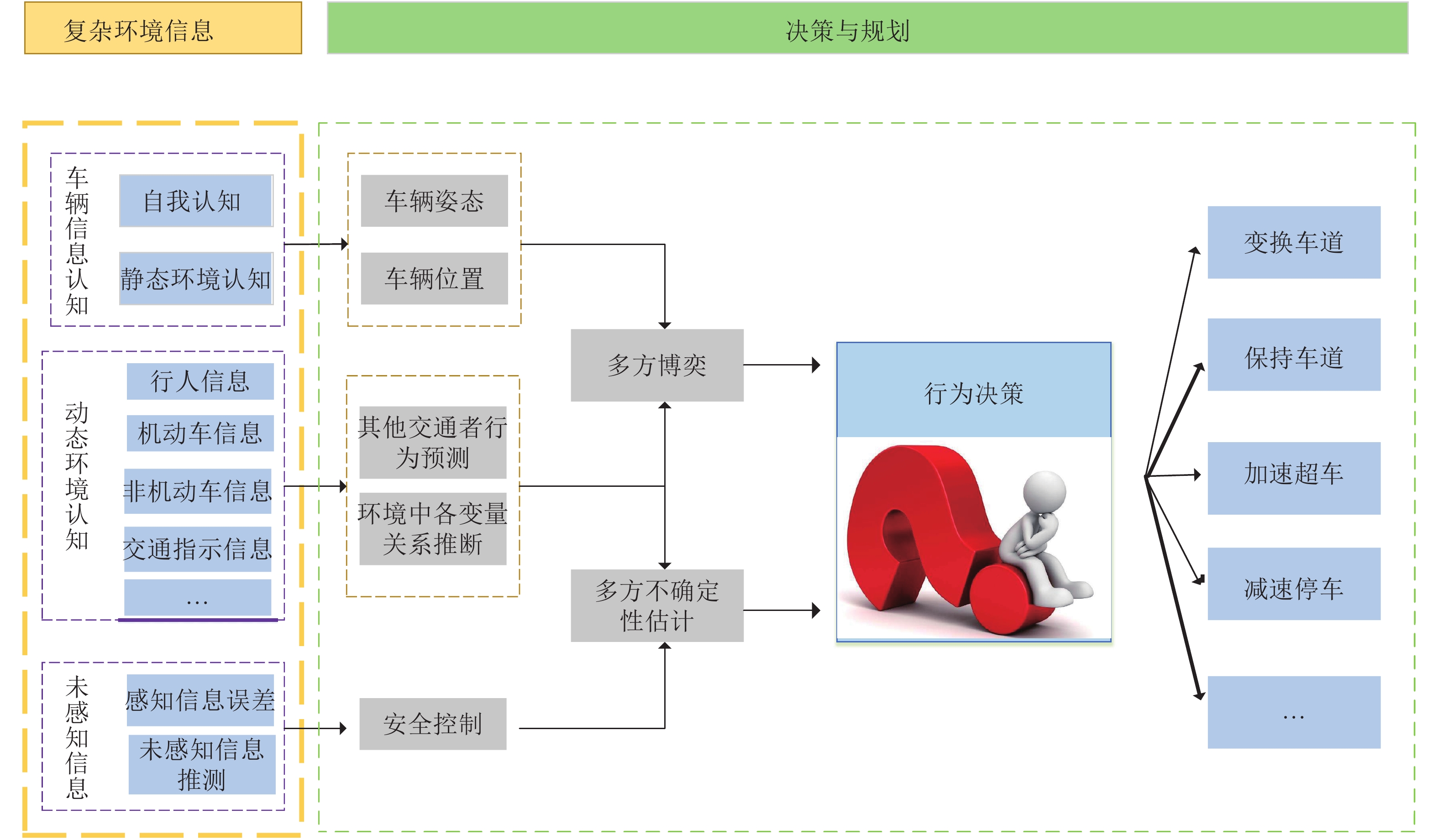
图 4 开放道路复杂场景的驾驶自主决策与规划技术
Fig. 4 The technology of decision-making and planning in open road with complex scenario
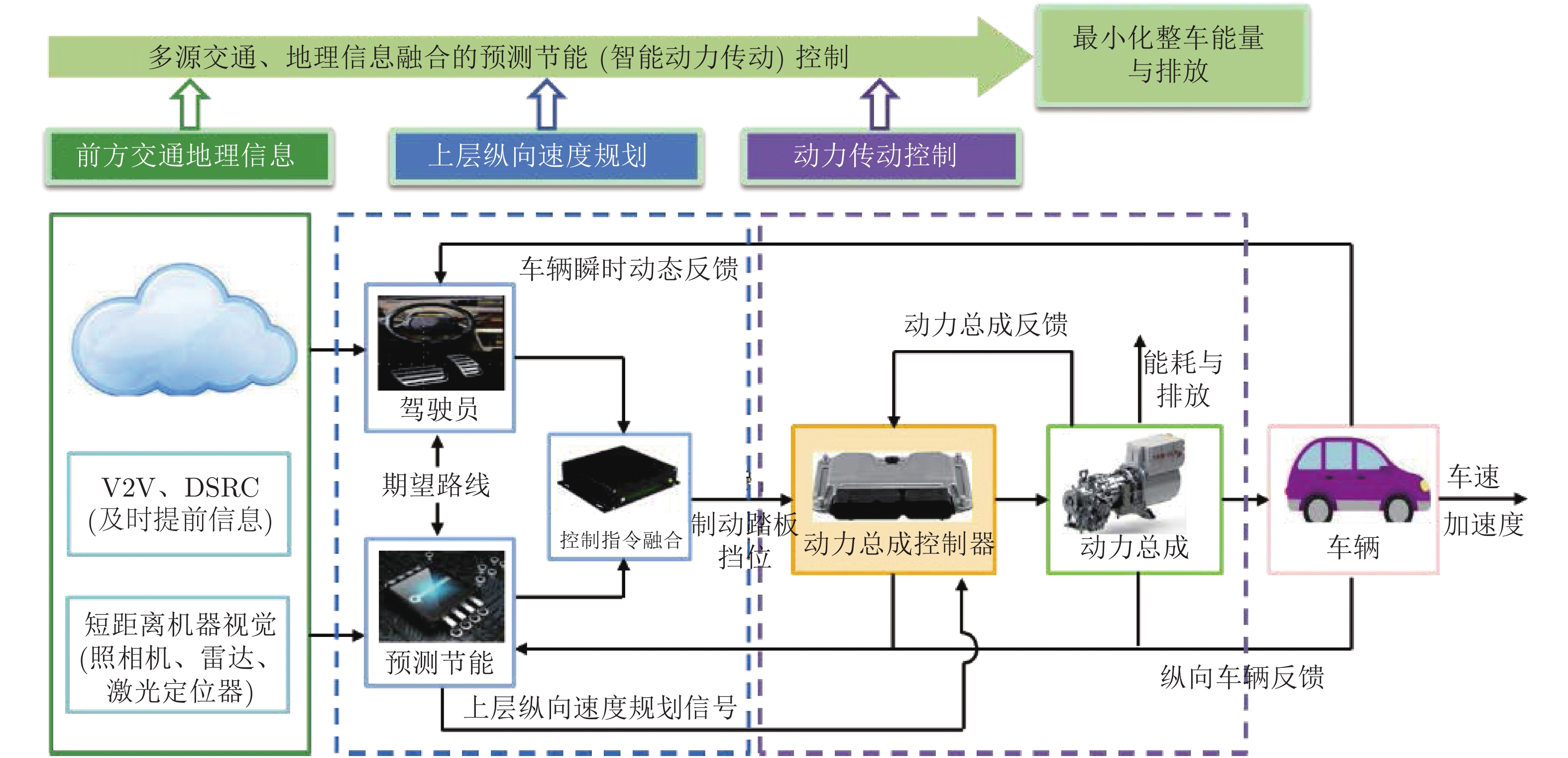
图 5 智能网联环境下的智能节能与减排技术框图
Fig. 5 Connectivity for improved fuel economy and reduced emission
-
[1] 国家制造强国建设战略咨询委员会. "绿皮书"助跑机器人—解读"中国制造2025"机器人领域技术路线图. 机器人产业, 2015, (5): 36−43National Manufacturing-Power-Construction-Strategy-Advisory-Committee. 《Made in China 2025》 technology roadmap in robotics. Robot Industry, 2015, (5): 36−43 [2] 黎宇科, 刘宇. 国内智能网联汽车发展现状及建议. 汽车与配件, 2016, (41): 56−59 doi: 10.3969/j.issn.1006-0162.2016.41.009Li Yu-Ke, Liu Yu. Development status and suggestions of intelligent networked automobile in China. Automobile & Parts, 2016, (41): 56−59 doi: 10.3969/j.issn.1006-0162.2016.41.009 [3] 陈虹, 郭露露, 边宁. 对汽车智能化进程及其关键技术的思考. 科技导报, 2017, 35(11): 52−59Chen Hong, Guo Lu-Lu, Bian Ning. On automobile intelligentization and key technologies. Science & Technology Review, 2017, 35(11): 52−59 [4] 陈虹, 宫洵, 胡云峰, 刘奇芳, 高炳钊, 郭洪艳. 汽车控制的研究现状与展望. 自动化学报, 2013, 39(4): 322−346 doi: 10.1016/S1874-1029(13)60033-6Chen Hong, Gong Xun, Hu Yun-Feng, Liu Qi-Fang, Gao Bing-Zhao, Guo Hong-Yan. Automotive control: the state of the art and perspective. Acta Automatica Sinica, 2013, 39(4): 322−346 doi: 10.1016/S1874-1029(13)60033-6 [5] Deur J, Pavkovic D, Peric N, Jansz M, Hrovat D. An electronic throttle control strategy including compensation of friction and limp-home effects. IEEE Transactions on Industry Applications, 2004, 40(3): 821−834 doi: 10.1109/TIA.2004.827441 [6] 胡云峰, 李超, 李骏, 郭洪艳, 孙鹏远, 陈虹. 基于观测器的输出反馈电子节气门控制器设计. 自动化学报, 2011, 37(6): 746−754Hu Yun-Feng, Li Chao, Li Jun, Guo Hong-Yan, Sun Peng-Yuan, Chen Hong. Observer-based output feedback control of electronic throttles. Acta Automatica Sinica, 2011, 37(6): 746−754 [7] Powell J D, Fekete N P, Chang C F. Observer-based air fuel ratio control. IEEE Control Systems Magazine, 1998, 18(5): 72−83 doi: 10.1109/37.722254 [8] Zhu G G, Haskara I, Winkelman I. Closed-loop ignition timing control for SI engines using ionization current feedback. IEEE Transactions on Control Systems Technology, 2007, 15(3): 416−427 doi: 10.1109/TCST.2007.894634 [9] Hrovat D, Sun J. Models and control methodologies for IC engine idle speed control design. Control Engineering Practice, 1997, 5(8): 1093−1100 doi: 10.1016/S0967-0661(97)00101-9 [10] Gerhardt J, Hönninger H, Bischof H. A New Approach to Functional and Software Structure for Engine Management Systems-BOSCH ME7, SAE Technical Paper 980801, SAE, 1998 [11] Ravi N, Liao H H, Jungkunz A F, Song H H, Gerdes J C. Modeling and control of exhaust recompression HCCI: split fuel injection for cylinder-individual combustion control. IEEE Control Systems Magazine, 2012, 32(4): 26−42 doi: 10.1109/MCS.2012.2194840 [12] Qiu Z, Santillo M, Jankovic M, Sun J. Composite adaptive internal model control and its application to boost pressure control of a turbocharged gasoline engine. IEEE Transactions on Control Systems Technology, 2015, 23(6): 2306−2315 doi: 10.1109/TCST.2015.2414400 [13] Hu Y F, Chen H, Wang P, Chen H, Ren L Q. Nonlinear model predictive controller design based on learning model for turbocharged gasoline engine of passenger vehicle. Mechanical Systems and Signal Processing, 2018, 109: 74−88 doi: 10.1016/j.ymssp.2018.02.012 [14] Hsieh M F, Wang J M. Development and experimental studies of a control-oriented SCR model for a two-catalyst urea-SCR system. Control Engineering Practice, 2011, 19(4): 409−422 doi: 10.1016/j.conengprac.2011.01.004 [15] Cook J A, Sun J, Buckland J H, Kolmanovsky I V, Peng H, Grizzle J W. Automotive powertrain control — A survey. Asian Journal of Control, 2006, 8(3): 237−260 [16] Glielmo L, Iannelli L, Vacca V, Vasca F. Gearshift control for automated manual transmissions. IEEE/ASME Transactions on Mechatronics, 2006, 11(1): 17−26 doi: 10.1109/TMECH.2005.863369 [17] Szabo T, Buchholz M, Dietmayer K. Optimal control of a gearshift with a dual-clutch transmission. In: Proceedings of ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium on Fluid Power and Motion Control. Arlington, USA: ASME, 2011. 751−756 [18] Tepeš B, Kasać J, Deur J. Optimal control of automated transmission engagement process. In: Proceedings of the 2012 IEEE International Conference on Control Applications. Dubrovnik, Croatia: IEEE, 2012. 329−335 [19] Gao B Z, Liang Q, Xiang Y, Guo L L, Chen H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mechanical Systems and Signal Processing, 2015, 50(1): 615−631 doi: 10.1016/j.ymssp.2014.05.045 [20] Guo L L, Gao B Z, Chen H. Online shift schedule optimization of 2-speed electric vehicle using moving horizon strategy. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2858−2869 doi: 10.1109/TMECH.2016.2586503 [21] Sciarretta A, Guzzella L. Control of hybrid electric vehicles. IEEE Control Systems Magazine, 2007, 27(2): 60−70 doi: 10.1109/MCS.2007.338280 [22] Zhao H Y, Ren B T, Chen H, Deng W W. Model predictive control allocation for stability improvement of four-wheel drive electric vehicles in critical driving condition. IET Control Theory & Applications, 2015, 9(18): 2688−2696 [23] Xiang W D, Richardson P C, Zhao C M, Mohammad S. Automobile brake-by-wire control system design and analysis. IEEE Transactions on Vehicular Technology, 2008, 57(1): 138−145 doi: 10.1109/TVT.2007.901895 [24] 韩伟, 熊璐, 侯一萌, 余卓平. 基于线控制动系统的车辆横摆稳定性优化控制. 同济大学学报(自然科学版), 2017, 45(5): 732−740Han Wei, Xiong Lu, Hou Yi-Meng, Yu Zhuo-Ping. Vehicle yaw stability optimized control based on brake by wire system. Journal of Tongji University (Natural Science), 2017, 45(5): 732−740 [25] Zhang J, Ioannou P A. Longitudinal control of heavy trucks in mixed traffic: environmental and fuel economy considerations. IEEE Transactions on Intelligent Transportation System, 2006, 7(1): 92−104 doi: 10.1109/TITS.2006.869597 [26] Li S E, Jia Z Z, Li K Q, Cheng B. Fast online computation of a model predictive controller and its application to fuel economy-oriented adaptive cruise control. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(3): 1199−1209 doi: 10.1109/TITS.2014.2354052 [27] Yamamura Y, Tabe M, Kanehira M, Murakami T. Development of an Adaptive Cruise Control System with Stop-and-Go Capability, SAE Technical Paper 2001-01-0798, SAE, 2001 [28] Zhao D B, Hu Z H, Xia Z P, Alippi C, Zhu Y H, Wang D. Full-range adaptive cruise control based on supervised adaptive dynamic programming. Neurocomputing, 2014, 125: 57−67 doi: 10.1016/j.neucom.2012.09.034 [29] Glaser H. Electronic Stability Program ESP. Lycksele, Sweden: Audi Press Presentation, 1996. 13 [30] Kremer M A. The electronic stability program (ESP) on the ford focus. In: Proceedings of 2000 European Conference on Vehicle Electronic Systems. Stratford-upon-Avon, UK: Vehicle Electronic Systems, 2000. [31] 盛勇鑫. 轿车侧向稳定性控制算法研究[硕士学位论文], 吉林大学, 中国, 2008Sheng Yong-Xin. Study on Lateral Stability Control Strategy for Car [Master thesis], Jilin University, China, 2008 [32] Yim S, Park Y, Yi K. Design of active suspension and electronic stability program for rollover prevention. International Journal of Automotive Technology, 2010, 11(2): 147−153 doi: 10.1007/s12239-010-0020-6 [33] 曹阳, 贺登博, 喻凡, 罗哲. 基于主动转向的车辆路径跟随广义预测控制. 上海交通大学学报, 2016, 50(3): 401−406Cao Yang, He Deng-Bo, Yu Fan, Luo Zhe. Generalized predictive control based on vehicle path following strategy by using active steering system. Journal of Shanghai Jiaotong University, 2016, 50(3): 401−406 [34] 刘成恩. 汽车主动转向系统设计及控制特性研究[硕士学位论文], 重庆交通大学, 中国, 2017Liu Cheng-En. Research on the Design and Control Features of the Automobile Active Front Steering [Master dissertation], Chongqing Jiaotong University, China, 2017 [35] 曹阳. 基于驾驶员模型的车辆主动转向控制研究[博士学位论文], 上海交通大学, 中国, 2016Cao Yang. Study of Vehicle Active Steering Control Based on Driver Model [Ph. D. dissertation], Shanghai Jiaotong University, China, 2016 [36] 宗长富, 李刚, 郑宏宇, 张泽星. 线控汽车底盘控制技术研究进展及展望. 中国公路学报, 2013, 26(2): 160−176 doi: 10.3969/j.issn.1001-7372.2013.02.023Zong Chang-Fu, Li Gang, Zheng Hong-Yu, Zhang Ze-Xing. Study progress and outlook of chassis control technology for X-by-wire automobile. China Journal of Highway and Transport, 2013, 26(2): 160−176 doi: 10.3969/j.issn.1001-7372.2013.02.023 [37] 何磊. 基于FlexRay总线的线控转向系统双电机控制方法研究[博士学位论文], 吉林大学, 中国, 2011He Lei. Research on Dual-motor Control Method Based on FlexRay Bus for Steering-by-Wire Automobile [Ph. D. dissertation], Jilin University, China, 2011 [38] 宗长富, 韩衍东, 何磊, 王祥. 汽车线控转向变角传动比特性研究. 中国公路学报, 2015, 28(9): 115−120 doi: 10.3969/j.issn.1001-7372.2015.09.015Zong Chang-Fu, Han Yan-Dong, He Lei, Wang Xiang. Research on variable angle transmission ratio characteristics for automobile with SBW. China Journal of Highway and Transport, 2015, 28(9): 115−120 doi: 10.3969/j.issn.1001-7372.2015.09.015 [39] Wu X D, Zhang M M, Xu M, Kakogawa Y. Adaptive feedforward control of a steer-by-wire system by online parameter estimator. International Journal of Automotive Technology, 2018, 19(1): 159−166 doi: 10.1007/s12239-018-0015-2 [40] 吴蒙, 张飞铁, 文桂林. 无人驾驶汽车线控转向系统控制策略的研究. 计算机仿真, 2016, 33(12): 163−168 doi: 10.3969/j.issn.1006-9348.2016.12.034Wu Meng, Zhang Fei-Tie, Wen Gui-Lin. The control strategy research of unmanned vehicles steering-by-wire system. Computer Simulation, 2016, 33(12): 163−168 doi: 10.3969/j.issn.1006-9348.2016.12.034 [41] 柳长春, 都东, 潘际銮. 基于小偏差模型预测的车道保持辅助控制. 清华大学学报(自然科学版), 2015, 55(10): 1087−1092Liu Chang-Chun, Du Dong, Pan Ji-Luan. Predictive control for lane control systems using a small deviation model. Journal of Tsinghua University (Science and Technology), 2015, 55(10): 1087−1092 [42] 任殿波, 崔胜民, 吴杭哲. 车道保持预瞄控制及其稳态误差分析. 汽车工程, 2016, 38(2): 192−199 doi: 10.3969/j.issn.1000-680X.2016.02.010Ren Dian-Bo, Cui Sheng-Min, Wu Hang-Zhe. Preview control for lane keeping and its steady-state error analysis. Automotive Engineering, 2016, 38(2): 192−199 doi: 10.3969/j.issn.1000-680X.2016.02.010 [43] 郭孔辉, 姜辉, 张建伟, 丁海涛. 基于模糊逻辑的自动平行泊车转向控制器. 吉林大学学报(工学版), 2009, 39(S2): 236−240Guo Kong-Hui, Jiang Hui, Zhang Jian-Wei, Ding Hai-Tao. Automatic parallel parking steering controller based on fuzzy logic control theory. Journal of Jilin University (Engineering and Technology Edition), 2009, 39(S2): 236−240 [44] Crolla D A, Cao D P. The impact of hybrid and electric powertrains on vehicle dynamics, control systems and energy regeneration. Vehicle System Dynamics, 2012, 50(S1): 95−109 [45] Pinto L. Advance Yaw Motion Control of a Hybrid Vehicle Using Twin Rear Electric Motors. AVEC, 2010 [46] 陈慧, 高博麟, 徐帆. 车辆质心侧偏角估计综述. 机械工程学报, 2013, 49(24): 76−94 doi: 10.3901/JME.2013.24.076Chen Hui, Gao Bo-Lin, Xu Fan. Review on vehicle sideslip angle estimation. Journal of Mechanical Engineering, 2013, 49(24): 76−94 doi: 10.3901/JME.2013.24.076 [47] 郭洪艳, 陈虹, 赵海艳, 杨斯琦. 汽车行驶状态参数估计研究进展与展望. 控制理论与应用, 2013, 30(6): 661−672 doi: 10.7641/CTA.2013.21190Guo Hong-Yan, Chen Hong, Zhao Hai-Yan, Yang Si-Qi. State and parameter estimation for running vehicle: recent developments and perspective. Control Theory & Applications, 2013, 30(6): 661−672 doi: 10.7641/CTA.2013.21190 [48] Rajamani R, Piyabongkarn D N. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 249−261 doi: 10.1109/TITS.2012.2215856 [49] Mokhiamar O, Abe M. How the four wheels should share forces in an optimum cooperative chassis control. Control Engineering Practice, 2006, 14(3): 295−304 doi: 10.1016/j.conengprac.2005.03.023 [50] Nagai M, Shino M, Gao F. Study on integrated control of active front steer angle and direct yaw moment. JSAE Review, 2002, 23(3): 309−315 doi: 10.1016/S0389-4304(02)00189-3 [51] 高晓杰, 余卓平, 张立军. 基于车辆状态识别的AFS与ESP协调控制研究. 汽车工程, 2007, 29(4): 283−291 doi: 10.3321/j.issn:1000-680X.2007.04.005Gao Xiao-Jie, Yu Zhuo-Ping, Zhang Li-Jun. Coordinated control of AFS and ESP based on vehicle state identification. Automotive Engineering, 2007, 29(4): 283−291 doi: 10.3321/j.issn:1000-680X.2007.04.005 [52] Cho W, Yoon J, Kim J, Hur J, Yi K. An investigation into unified chassis control scheme for optimised vehicle stability and manoeuvrability. Vehicle System Dynamics, 2008, 46(S1): 87−105 [53] 冀杰, 李以农, 郑玲, 赵树恩. 车辆自动驾驶系统纵向和横向运动综合控制. 中国公路学报, 2010, 23(5): 119−126 doi: 10.3969/j.issn.1001-7372.2010.05.019Ji Jie, Li Yi-Nong, Zheng Ling, Zhao Shu-En. Integrated control of longitudinal and lateral motion for autonomous vehicle driving system. China Journal of Highway and Transport, 2010, 23(5): 119−126 doi: 10.3969/j.issn.1001-7372.2010.05.019 [54] Katriniok A, Maschuw J P, Christen F, Eckstein L, Abel D. Optimal vehicle dynamics control for combined longitudinal and lateral autonomous vehicle guidance. In: Proceedings of the 2013 European Control Conference (ECC). Zurich, Switzerland: IEEE, 2013. 974−979 [55] Xu L H, Wang Y Z, Sun H B, Xin J M, Zheng N N. Integrated longitudinal and lateral control for Kuafu-Ⅱ autonomous vehicle. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2032−2041 doi: 10.1109/TITS.2015.2498170 [56] Nunes A, Reimer B, Coughlin J F. People must retain control of autonomous vehicles. Nature, 2018, 556(7700): 169−171 doi: 10.1038/d41586-018-04158-5 [57] Liu Y H, Fan X Q, Lv C, Wu J, Li L, Ding D W. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles. Mechanical Systems and Signal Processing, 2018, 100: 605−616 doi: 10.1016/j.ymssp.2017.07.051 [58] 陆炳华, 刘婷, 张海滨. 智能驾驶汽车传感器介绍及布置. 上海汽车, 2017, (11): 40−43 doi: 10.3969/j.issn.1007-4554.2017.11.10Lu Bing-Hua, Liu Ting, Zhang Hai-Bin. Introduction and layout of sensors for intelligent driving cars. Shanghai Auto, 2017, (11): 40−43 doi: 10.3969/j.issn.1007-4554.2017.11.10 [59] 马国成. 车辆自适应巡航跟随控制技术研究[博士学位论文], 北京理工大学, 中国, 2014Ma Guo-Cheng. Research on the Adaptive Cruise Control Tracking System Applied for Motor vehicles [Ph. D. dissertation], Beijing Institute of Technology, China, 2014 [60] Kuo Y C, Pai N S, Li Y F. Vision-based vehicle detection for a driver assistance system. Computers & Mathematics with Applications, 2011, 61(8): 2096−2100 [61] Takeuchi E, Yoshihara Y, Yoshiki N. Blind area traffic prediction using high definition maps and LiDAR for safe driving assist. In: Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems. Las Palmas, Spain: IEEE, 2015. 2311−2316 [62] Heimberger M, Horgan J, Hughes C, McDonald J, Yogamani S. Computer vision in automated parking systems: design, implementation and challenges. Image and Vision Computing, 2017, 68: 88−101 doi: 10.1016/j.imavis.2017.07.002 [63] Jung H G, Cho Y H, Yoon P J, Kim J. Scanning laser radar-based target position designation for parking aid system. IEEE Transactions on Intelligent Transportation Systems, 2008, 9(3): 406−424 doi: 10.1109/TITS.2008.922980 [64] 孙宁, 秦洪懋, 张利, 葛如海. 基于多传感器信息融合的车辆目标识别方法. 汽车工程, 2017, 39(11): 1310−1315Sun Ning, Qin Hong-Mao, Zhang Li, Ge Ru-Hai. Vehicle target recognition based on multi-sensor information fusion. Automotive Engineering, 2017, 39(11): 1310−1315 [65] Möbus R, Baotic M, Morari M. Multi-object adaptive cruise control. In: Proceedings of the 6th International Workshop on Hybrid Systems: Computation and Control. Prague, Czech Republic: Springer, 2003. 359−374 [66] Cheng H, Zheng N N, Zhang X T, Qin J J, Van De Wetering H. Interactive road situation analysis for driver assistance and safety warning systems: framework and algorithms. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(1): 157−167 doi: 10.1109/TITS.2006.890073 [67] Paden B, Čáp M, Yong S Z, Yershov, D, Frazzoli E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33−55 doi: 10.1109/TIV.2016.2578706 [68] Kanayama Y J, Hartman B I. Smooth local-path planning for autonomous vehicles. The International Journal of Robotics Research, 1997, 16(3): 263−284 doi: 10.1177/027836499701600301 [69] 冯来春. 基于引导域的参数化RRT无人驾驶车辆运动规划算法研究[硕士学位论文], 中国科学技术大学, 中国, 2017Feng Lai-Chun. Research on Autonomous Vehicle Motion Planning Method Using Parameterized RRT Based on Guiding Area [Master thesis], University of Science and Technology of China, China, 2017 [70] 苏锑, 杨明, 王春香, 唐卫, 王冰. 一种基于分类回归树的无人车汇流决策方法. 自动化学报, 2018, 44(1): 35−43Su Ti, Yang Ming, Wang Chun-Xiang, Tang Wei, Wang Bing. Classification and regression tree based traffic merging for method self-driving vehicles. Acta Automatica Sinica, 2018, 44(1): 35−43 [71] Furda A, Vlacic L. Enabling safe autonomous driving in real-world city traffic using multiple criteria decision making. IEEE Intelligent Transportation Systems Magazine, 2011, 3(1): 4−17 doi: 10.1109/MITS.2011.940472 [72] Ishikawa K, Fujinami T, Sakurai A. Integration of constraint logic programming and artificial neural networks for driving robots. In: Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the Next Millennium. Maui, USA: IEEE, 2001. 1011−1016 [73] Chong L S, Abbas M M, Flintsch A M, Higgs B. A rule-based neural network approach to model driver naturalistic behavior in traffic. Transportation Research Part C: Emerging Technologies, 2013, 32: 207−223 doi: 10.1016/j.trc.2012.09.011 [74] 许骏, 李一兵. 基于Markov决策过程的驾驶员行为模型. 汽车工程, 2008, 30(1): 14−16, 60 doi: 10.3321/j.issn:1000-680X.2008.01.003Xu Jun, Li Yi-Bing. A driver behavior model based on Markov decision processes. Automotive Engineering, 2008, 30(1): 14−16, 60 doi: 10.3321/j.issn:1000-680X.2008.01.003 [75] 王娟, 朱庆保, 崔靖. 复杂环境下基于贝叶斯决策的机器人路径规划. 计算机工程与应用, 2012, 48(2): 245−248 doi: 10.3778/j.issn.1002-8331.2012.02.070Wang Juan, Zhu Qing-Bao, Cui Jing. Robot path planning based on Bayes decision in complex environment. Computer Engineering and Applications, 2012, 48(2): 245−248 doi: 10.3778/j.issn.1002-8331.2012.02.070 [76] Ulbrich S, Maurer M. Probabilistic online POMDP decision making for lane changes in fully automated driving. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). The Hague, Netherlands: IEEE, 2013. 2063−2067 [77] Brechtel S, Gindele T, Dillmann R. Probabilistic decision-making under uncertainty for autonomous driving using continuous POMDPs. In: Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao, China: IEEE, 2014. 392−399 [78] Havlak F, Campbell M. Discrete and continuous, probabilistic anticipation for autonomous robots in urban environments. IEEE Transactions on Robotics, 2014, 30(2): 461−474 doi: 10.1109/TRO.2013.2291620 [79] Tran Q, Firl J. Modelling of traffic situations at urban intersections with probabilistic non-parametric regression. In: Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV). Gold Coast, Australia: IEEE, 2013. 334−339 [80] Friedman J H. An overview of predictive learning and function approximation. From Statistics to Neural Networks: Theory and Pattern Recognition Applications. Berlin Heidelberg: Springer, 1994. 1−61 [81] Osborne M J, Rubinstein A. A Course in Game Theory. Cambridge: MIT Press, 1994. [82] Graves A, Wayne G, Reynolds M, Harley T, Danihelka I, Grabska-Barwińska A, et al. Hybrid computing using a neural network with dynamic external memory. Nature, 2016, 538(7626): 471−476 doi: 10.1038/nature20101 [83] Arulampalam M S, Maskell S, Gordon N, Clapp T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Transactions on Signal Processing, 2002, 50(2): 174−188 doi: 10.1109/78.978374 [84] Ando N, Fujimoto H. Yaw-rate control for electric vehicle with active front/rear steering and driving/braking force distribution of rear wheels. In: Proceedings of the 11th IEEE International Workshop on Advanced Motion Control (AMC). Nagaoka, Niigata, Japan: IEEE, 2010. 726−731 [85] Wang F, Chen H, Guo H Y, Cao D P. Constrained H∞ control for road vehicles after a tire blow-out. Mechatronics, 2015, 30: 371−382 doi: 10.1016/j.mechatronics.2014.12.007 [86] Wang F, Chen H, Cao D P. Nonlinear coordinated motion control of road vehicles after a tire blowout. IEEE Transactions on Control Systems Technology, 2016, 24(3): 956−970 doi: 10.1109/TCST.2015.2472982 [87] Wang F, Chen H, Guo K H, Cao D P. A novel integrated approach for path following and directional stability control of road vehicles after a tire blow-out. Mechanical Systems and Signal Processing, 2017, 93: 431−444 doi: 10.1016/j.ymssp.2017.02.016 [88] 王菲, 刘柏楠, 郭洪艳, 陈虹. 爆胎汽车的轨迹跟踪与稳定性控制. 电机与控制学报, 2013, 17(11): 97−104 doi: 10.3969/j.issn.1007-449X.2013.11.015Wang Fei, Liu Bai-Nan, Guo Hong-Yan, Chen Hong. Trajectory tracking and stability control for vehicle after tire blow-out. Electric Machines and Control, 2013, 17(11): 97−104 doi: 10.3969/j.issn.1007-449X.2013.11.015 [89] Shen X M, Yu F. Investigation on integrated vehicle chassis control based on vertical and lateral tyre behaviour correlativity. Vehicle System Dynamics, 2006, 44(S1): 506−519 [90] Song J. Integrated control of brake pressure and rear-wheel steering to improve lateral stability with fuzzy logic. International Journal of Automotive Technology, 2012, 13(4): 563−570 doi: 10.1007/s12239-012-0054-z [91] 李勇. 无信号灯十字交叉口协作车辆控制研究[硕士学位论文], 北京理工大学, 中国, 2015Li Yong. Research on Multi-Vehicle Cooperation and Control in an Intersection without Traffic Light [Master thesis], Beijing Institute of Technology, China, 2015 [92] Kawabe T, Nishira H, Ohtsuka T. An optimal path generator using a receding horizon control scheme for intelligent automobiles. In: Proceedings of the 2004 IEEE International Conference on Control Applications. Taipei, China: IEEE, 2004. 1597−1602 [93] Glaser S, Vanholme B, Mammar S, Gruyer D, Nouvelière L. Maneuver-based trajectory planning for highly autonomous vehicles on real road with traffic and driver interaction. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 589−606 doi: 10.1109/TITS.2010.2046037 [94] Koo Y, Kim J, Han W. A method for driving control authority transition for cooperative autonomous vehicle. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV). Seoul, South Korea: IEEE, 2015. 394−399 [95] 胡云峰, 曲婷, 刘俊, 施竹清, 朱冰, 曹东璞, 等. 智能汽车人机协同控制的研究现状与展望. 自动化学报, 2019, 45(7): 1261−1280Hu Yun-Feng, Qu Ting, Liu Jun, Shi Zhu-Qing, Zhu Bing, Cao Dong-Pu, et al. Human-machine cooperative control of intelligent vehicle: recent developments and future Perspectives. Acta Automatica Sinica, 2019, 45(7): 1261−1280 [96] Xu F, Chen H, Gong X, Mei Q. Fast nonlinear model predictive control on FPGA using particle swarm optimization. IEEE Transactions on Industrial Electronics, 2016, 63(1): 310−321 doi: 10.1109/TIE.2015.2464171 [97] Whaiduzzaman M, Sookhak M, Gani A, Buyya R. A survey on vehicular cloud computing. Journal of Network and Computer Applications, 2014, 40: 325−344 doi: 10.1016/j.jnca.2013.08.004 [98] Yang M, Otterness N, Amert T, Bakita J, Anderson J H, Smith F D. Avoiding pitfalls when using NVIDIA GPUs for real-time tasks in autonomous systems. In: Proceedings of the 30th Euromicro Conference on Real-Time Systems (ECRTS 2018). Dagstuhl, Germany: Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik, 2018. 1−21 [99] Jalali H, Hinton K, Ayre R, Alpcan T, Tucker R S. Fog computing may help to save energy in cloud computing. IEEE Journal on Selected Areas in Communications, 2016, 34(5): 1728−1739 doi: 10.1109/JSAC.2016.2545559 [100] Shi W J, Alawieh M B, Li X, Yu H F. Algorithm and hardware implementation for visual perception system in autonomous vehicle: a survey. Integration, 2017, 59: 148−156 doi: 10.1016/j.vlsi.2017.07.007 [101] Abadi M, Barham P, Chen J M, Chen Z F, Davis A, Dean J, et al. TensorFlow: a system for large-scale machine learning. In: Proceedings of the 12th USENIX Conference on Operating Systems Design and Implementation. Savannah, USA: ACM, 2016. 265−283 [102] Cheng L, Henty B E, Stancil D D, Bai F, Mudalige P. Mobile vehicle-to-vehicle narrow-band channel measurement and characterization of the 5.9 GHz dedicated short range communication (DSRC) frequency band. IEEE Journal on Selected Areas in Communications, 2007, 25(8): 1501−1516 [103] Vaezi M, Ding Z G, Poor V. Multiple Access Techniques for 5G Wireless Networks and Beyond. Cham: Springer, 2019. [104] 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017. 中国公路学报, 2017, 30(6): 1−197 doi: 10.3969/j.issn.1001-7372.2017.06.001Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017. China Journal of Highway and Transport, 2017, 30(6): 1−197 doi: 10.3969/j.issn.1001-7372.2017.06.001 [105] Wang W, Liu Z Y, Xie R R. Quadratic extended Kalman filter approach for GPS/INS integration. Aerospace Science and Technology, 2006, 10(8): 709−713 doi: 10.1016/j.ast.2006.03.003 [106] Liu Y H, Fan X Q, Lv C, Wu J, Li L, Ding D W. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles. Mechanical Systems and Signal Processing, 2018, 100: 605−616 doi: 10.1016/j.ymssp.2017.07.051 [107] Hinton G E, Osindero S, Teh Y W. A fast learning algorithm for deep belief nets. Neural Computation, 2006, 18(7): 1527−1554 doi: 10.1162/neco.2006.18.7.1527 [108] Jaradat M A K, Abdel-Hafez M F. Enhanced, delay dependent, intelligent fusion for INS/GPS navigation system. IEEE Sensors Journal, 2014, 14(5): 1545−1554 doi: 10.1109/JSEN.2014.2298896 [109] Ren S Q, He K M, Girshick R, Sun J. Faster R-CNN: towards real-time object detection with region proposal networks. In: Proceedings of the 28th Conference on Neural Information Processing Systems. Cambridge, UK: MIT Press: ACM, 2015. 91−99 [110] Bojarski M, Del Testa D, Dworakowski D, Firner B, Flepp B, Goyal P, Jackel L D, et al. End to end learning for self-driving cars. Arxiv Preprint Arxiv: 1604.07316, 2016. [111] Bojarski M, Yeres P, Choromanska A, Choromanski K, Firner B, Jackel L, et al. Explaining how a deep neural network trained with end-to-end learning steers a car. arXiv preprint arXiv: 1704.07911, 2017. [112] Kim J, Park C. End-to-end ego lane estimation based on sequential transfer learning for self-driving cars. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Honolulu, USA: IEEE, 2017. 1194−1202 [113] Sallab A E, Abdou M, Perot E, Yogamani S. End-to-end deep reinforcement learning for lane keeping assist. arXiv preprint arXiv: 1612.04340, 2016. [114] Brechtel S, Gindele T, Dillmann R. Probabilistic MDP-behavior planning for cars. In: Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). Washington, USA: IEEE, 2011. 1537−1542 [115] Galceran E, Cunningham A G, Eustice R M, Olson E. Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction: theory and experiment. Autonomous Robots, 2017, 41(6): 1367−1382 doi: 10.1007/s10514-017-9619-z [116] Zhang Y X, Gao B Z, Guo L L, Chen H, Zhao J H. Velocity control in a right-turn across traffic scenario for autonomous vehicles using kernel-based reinforcement learning. In: Proceedings of the 2017 Chinese Automation Congress (CAC). Jinan, China: IEEE, 2017. 6211−6216 [117] Zhu Q, Huang Z H, Sun Z P, Liu D X, Dai B. Reinforcement learning based throttle and brake control for autonomous vehicle following. In: Proceedings of the 2017 Chinese Automation Congress (CAC). Jinan, China: IEEE, 2017. 6657−6662 [118] Huang Z H, Xu X, He H B, Tan J, Sun Z P. Parameterized batch reinforcement learning for longitudinal control of autonomous land vehicles. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(4): 730−741 doi: 10.1109/TSMC.2017.2712561 [119] Xu N Y, Tan B W, Kong B Y. Autonomous driving in reality with reinforcement learning and image translation. arXiv preprint arXiv: 1801.05299, 2018. [120] Sadigh D, Sastry S, Seshia S A, Dragan A D. Planning for autonomous cars that leverage effects on human actions. Robotics: Science and Systems. Ann Arbor, MI, USA, 2016. 2 [121] Bieshaar M, Reitberger G, Kreß V, Zernetsch S, Doll K, Fuchs E, et al. Highly automated learning for improved active safety of vulnerable road users. arXiv preprint arXiv: 1803.03479, 2018. [122] Tian Y C, Pei K X, Jana S, Ray B. DeepTest: automated testing of deep-neural-network-driven autonomous cars. In: Proceedings of the 40th International Conference on Software Engineering. Gothenburg, Sweden: ACM, 2018. 303−314 [123] 段艳杰, 吕宜生, 张杰, 赵学亮, 王飞跃. 深度学习在控制领域的研究现状与展望. 自动化学报, 2016, 42(5): 643−654Duan Yan-Jie, Lv Yi-Sheng, Zhang Jie, Zhao Xue-Liang, Wang Fei-Yue. Deep learning for control: the state of the art and prospects. Acta Automatica Sinica, 2016, 42(5): 643−654 [124] Mnih V, Kavukcuoglu K, Silver D, Rusu A A, Veness J, Bellemare M G, et al. Human-level control through deep reinforcement learning. Nature, 2015, 518(7540): 529−533 doi: 10.1038/nature14236 [125] 陈虹. 模型预测控制. 北京: 中国科学出版社, 2013.Chen Hong. Model Predictive Control. Beijing: China Science Press, 2013. [126] Hrovat D. MPC-based idle speed control for IC engines. In: Proceedings of 1996 FISITA Conference. 1996. [127] Huang M, Zaseck K, Butts K, Kolmanovsky I. Rate-based model predictive controller for diesel engine air path: design and experimental evaluation. IEEE Transactions on Control Systems Technology, 2016, 24(6): 1922−1935 doi: 10.1109/TCST.2016.2529503 [128] Gong X, Kolmanovsky I, Garone E, Zaseck K, Chen H. Constrained control of free piston engine generator based on implicit reference governor. Science China Information Sciences, 2018, 61(7): Article No.70203 doi: 10.1007/s11432-017-9337-1 [129] Di Cairano S, Liang W, Kolmanovsky I V, Kuang M L, Phillips A M. Power smoothing energy management and its application to a series hybrid powertrain. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2091−2103 doi: 10.1109/TCST.2012.2218656 [130] Guo L L, Gao B Z, Gao Y, Chen H. Optimal energy management for HEVs in eco-driving applications Using Bi-Level MPC. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(8): 2153−2162 doi: 10.1109/TITS.2016.2634019 [131] Hsieh M F, Wang J M, Canova M. Two-level nonlinear model predictive control for lean NO_x trap regenerations. Journal of Dynamic Systems, Measurement, and Control, 2010, 132(4): Article No.041001 [132] Bemporad A, Bernardini D, Long R X, Verdejo J. Model Predictive Control of Turbocharged Gasoline Engines for Mass Production, SAE Technical Paper 2018-01-0875, SAE, 2018. [133] Guo H Y, Liu F, Xu F, Chen H, Cao D P, Ji Y. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(1): 2−13 doi: 10.1109/TSMC.2017.2749337 [134] Wang F, Chen H, Guo L L, Hu Y F. Predictive safety control for road vehicles after a tire blowout. Science China Information Sciences, 2018, 61(7): Article No.70209 doi: 10.1007/s11432-017-9330-6 [135] Xu X, Chen H, Lian C Q, Li D Z. Learning-based predictive control for discrete-time nonlinear systems with stochastic disturbances. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(12): 6202−6213 doi: 10.1109/TNNLS.2018.2820019 [136] Xu F, Chen H, Gong X, Mei Q. Fast nonlinear model predictive control on FPGA using particle swarm optimization. IEEE Transactions on Industrial Electronics, 2016, 63(1): 310−321 doi: 10.1109/TIE.2015.2464171 [137] Khalil H K. Nonlinear Systems (Third Edition). Prentice Hall, Upper Saddle River: Pearson, 2002. [138] Chen H, Gong X, Liu Q F, Hu Y F. Triple-step method to design non-linear controller for rail pressure of gasoline direct injection engines. IET Control Theory & Applications, 2014, 8(11): 948−959 [139] Liu Q F, Gong X, Chen H, Xin B Y, Sun P Y. Nonlinear GDI rail pressure control: design, analysis and experimental implementation. In: Proceedings of the 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. 8132−8139 [140] Gao B Z, Chen H, Liu Q F, Chu H Q. Position control of electric clutch actuator using a triple-step nonlinear method. IEEE Transactions on Industrial Electronics, 2014, 61(12): 6995−7003 doi: 10.1109/TIE.2014.2317131 [141] Wang F, Chen H, Cao D P. Nonlinear coordinated motion control of road vehicles after a tire blowout. IEEE Transactions on Control Systems technology, 2016, 24(3): 956−970 doi: 10.1109/TCST.2015.2472982 [142] Wang Y L, Zong C F, Li K, Chen H. Fault-tolerant control for in-wheel-motor-driven electric ground vehicles in discrete time. Mechanical Systems and Signal Processing, 2019, 121: 441−454 doi: 10.1016/j.ymssp.2018.11.030 [143] Na X X, Cole D J. Modelling of a human driver’s interaction with vehicle automated steering using cooperative game theory. IEEE/CAA Journal of Automatica Sinica, 2019, 6(5): 1095−1107 doi: 10.1109/JAS.2019.1911675 [144] Dextreit C, Kolmanovsky I V. Game theory controller for hybrid electric vehicles. IEEE Transactions on Control Systems Technology, 2014, 22(2): 652−663 doi: 10.1109/TCST.2013.2254597 [145] Yin X, Chen J, Li Z J, Li S Y. Robust fault diagnosis of stochastic discrete event systems. IEEE Transactions on Automatic Control, 2019, 64(10): 4237−4244 doi: 10.1109/TAC.2019.2893873 [146] Qin H, Long S X, Yu K. Simulation research on the shift schedule in the auto with automated manual transmission based on cruise gear shift program. Advanced Materials Research, 2013, 712-715: 2160−2163 doi: 10.4028/www.scientific.net/AMR.712-715.2160 [147] Hofman T, Dai C H. Energy efficiency analysis and comparison of transmission technologies for an electric vehicle. In: Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference. Lille, France: IEEE, 2010. 1−6 [148] Mashadi B, Kazemkhani A, Lakeh R B. An automatic gear-shifting strategy for manual transmissions. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2007, 221(5): 757−768 doi: 10.1243/09596518JSCE253 [149] Ozatay E, Ozguner U, Filev D. Velocity profile optimization of on road vehicles: pontryagin's maximum principle based approach. Control Engineering Practice, 2017, 61: 244−254 doi: 10.1016/j.conengprac.2016.09.006 [150] Kockelman K, Avery P, Bansal P, Boyles S D, Bujanovic P, Choudhary T, et al. Implications of Connected and Automated Vehicles on the Safety and Operations of Roadway Networks: A Final Report. CTR Technical Report FHWA/TX-16/0-6849-1, Center for Transportation Research, The University of Texas at Austin, Austin, USA, 2016. [151] Beusen B, Broekx S, Denys T, Beckx C, Degraeuwe B, Gijsbers M, et al. Using on-board logging devices to study the longer-term impact of an eco-driving course. Transportation Research Part D: Transport and Environment, 2009, 14(7): 514−520 doi: 10.1016/j.trd.2009.05.009 [152] Kamal M A S, Mukai M, Murata J, Kawabe T. Ecological driver assistance system using model-based anticipation of vehicle-road-traffic information. IET Intelligent Transport Systems, 2010, 4(4): 244−251 doi: 10.1049/iet-its.2009.0127 [153] ARPA-E Programs [Online], available: https://arpa-e.energy.gov/?q=program-listing, December 13, 2019. [154] Ahn K, Rakha H A, Park S. Ecodrive application: algorithmic development and preliminary testing. Transportation Research Record: Journal of the Transportation Research Board, 2013, 2341(1): 1−11 doi: 10.3141/2341-01 [155] Barth M, Boriboonsomsin K. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transportation Research Part D: Transport and Environment, 2009, 14(6): 400−410 doi: 10.1016/j.trd.2009.01.004 [156] Asadi B, Vahidi A. Predictive cruise control: utilizing upcoming traffic signal information for improving fuel economy and reducing trip time. IEEE Transactions on Control Systems Technology, 2011, 19(3): 707−714 doi: 10.1109/TCST.2010.2047860 [157] Jin Q, Wu G Y, Boriboonsomsin K, Barth M J. Power-based optimal longitudinal control for a connected eco-driving system. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2900−2910 doi: 10.1109/TITS.2016.2535439 [158] Dib W, Chasse A, Moulin P, Sciarretta A, Corde G. Optimal energy management for an electric vehicle in eco-driving applications. Control Engineering Practice, 2014, 29: 299−307 doi: 10.1016/j.conengprac.2014.01.005 [159] Sciarretta A, De Nunzio G, Ojeda L L. Optimal ecodriving control: energy-efficient driving of road vehicles as an optimal control problem. IEEE Control Systems Magazine, 2015, 35(5): 71−90 doi: 10.1109/MCS.2015.2449688 [160] Guo L L, Gao B Z, Liu Q F, Tang J H, Chen H. On-line optimal control of the gearshift command for multispeed electric vehicles. IEEE/ASME Transactions on Mechatronics, 2017, 22(4): 1519−1530 doi: 10.1109/TMECH.2017.2716340 [161] Saust F, Wille J M, Maurer M. Energy-optimized driving with an autonomous vehicle in urban environments. In: Proceedings of the 75th IEEE Vehicular Technology Conference (VTC Spring). Yokohama, Japan: IEEE, 2012. 1−5 [162] Wahl H G, Holzäpfel M, Gauterin F. Approximate dynamic programming methods applied to far trajectory planning in optimal control. In: Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn, USA: IEEE, 2014. 1085−1090 [163] Kamal M A S, Mukai M, Murata J, Kawabe T. Model predictive control of vehicles on urban roads for improved fuel economy. IEEE Transactions on Control Systems Technology, 2013, 21(3): 831−841 doi: 10.1109/TCST.2012.2198478 [164] Rugh J, Farrington R. Vehicle Ancillary Load Reduction Project Close-Out Report: An Overview of the Task and A Compilation of the Research Results, No. NREL/TP-540-42454, National Renewable Energy Lab (NREL), Golden, CO, USA, 2008. [165] Jeffers M A, Chaney L, Rugh J P. Climate Control Load Reduction Strategies for Electric Drive Vehicles in Warm Weather, No. NREL/CP-5400-63551, National Renewable Energy Lab (NREL), Golden, CO, USA, 2015. [166] Kim N, Rousseau A, Lee D, Lohse-busch H. Thermal Model Development and Validation for 2010 Toyota Prius, SAE Technical Paper 2014-01-1784, SAE, 2014. [167] Wang H, Kolmanovsky I, Amini M R, Sun J. Model predictive climate control of connected and automated vehicles for improved energy efficiency. In: Proceedings of the 2018 Annual American Control Conference (ACC). Milwaukee, USA: IEEE, 2018. 828−833 [168] Yang H, Jin W L. A control theoretic formulation of green driving strategies based on inter-vehicle communications. Transportation Research Part C: Emerging Technologies, 2014, 41: 48−60 doi: 10.1016/j.trc.2014.01.016 [169] Lee J, Park B, Malakorn K, So J. Sustainability assessments of cooperative vehicle intersection control at an urban corridor. Transportation Research Part C: Emerging Technologies, 2013, 32: 193−206 doi: 10.1016/j.trc.2012.09.004 [170] Coelho M C, Farias T L, Rouphail N M. Impact of speed control traffic signals on pollutant emissions. Transportation Research Part D: Transport and Environment, 2005, 10(4): 323−340 doi: 10.1016/j.trd.2005.04.005 [171] Tielert T, Killat M, Hartenstein H, Luz R, Hausberger S, Benz T. The impact of traffic-light-to-vehicle communication on fuel consumption and emission. In: Proceedings of the 2010 Internet of Things (IOT). Tokyo, Japan: IEEE, 2010. 1−8 [172] Barth M, Boriboonsomsin K. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transportation Research Part D: Transport and Environment, 2009, 14(6): 400−410 doi: 10.1016/j.trd.2009.01.004 [173] Barth M, Mandava S, Boriboonsomsin K, Xia H T. Dynamic ECO-driving for arterial corridors. In: Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation Systems. Vienna, Austria: IEEE, 2011. 182−188 [174] Rajagopalan A, Washington G. Intelligent Control of Hybrid Electric Vehicles using GPS Information, SAE Technical Paper 2002-01-1936, SAE, 2002. [175] Zheng Y, Li S B, Li K Q, Borrelli F, Hedrick J K. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Transactions on Control System Technology, 2017, 25(3): 899−910 doi: 10.1109/TCST.2016.2594588 [176] Li S B, Zheng Y, Li K Q, Wang L Y, Zhang H W. Platoon control of connected vehicles from a networked control perspective: literature review, component modeling, and controller synthesis. IEEE Transactions on Vehicular Technology, to be published [177] Makarem L, Gillet D. Model predictive coordination of autonomous vehicles crossing intersections. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). The Hague, Netherlands: IEEE, 2013. 1799−1804 [178] Turri V, Carvalho A, Tseng H E, Johansson K H, Borrelli F. Linear model predictive control for lane keeping and obstacle avoidance on low curvature roads. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). The Hague, Netherlands: IEEE, 2013. 378−383 [179] Wang F, Chen H, Guo L L, Hu Y F. Predictive safety control for road vehicles after a tire blowout. Science China Information Sciences, 2018, 61(7): Article No.70209 doi: 10.1007/s11432-017-9330-6 [180] Guo H Y, Shen C, Zhang H, Chen H, Jia R. Simultaneous trajectory planning and tracking using an MPC method for cyber-physical systems: a case study of obstacle avoidance for an intelligent vehicle. IEEE Transactions on Industrial Informatics, 2018, 14(9): 4273−4283 doi: 10.1109/TII.2018.2815531 [181] Guo H Y, Liu J, Cao D P, Chen H, Yu R, Lv C. Dual-envelop-oriented moving horizon path tracking control for fully automated vehicles. Mechatronics, 2018, 50: 422−433 doi: 10.1016/j.mechatronics.2017.02.001 [182] Ren B T, Chen H, Zhao H Y, Yuan L. MPC-based yaw stability control in in-wheel-motored EV via active front steering and motor torque distribution. Mechatronics, 2016, 38: 103−114 doi: 10.1016/j.mechatronics.2015.10.002 [183] Yuan L, Zhao H Y, Chen H, Ren B T. Nonlinear MPC-based slip control for electric vehicles with vehicle safety constraints. Mechatronics, 2016, 38: 1−15 doi: 10.1016/j.mechatronics.2016.05.006 [184] Li Z J, Kolmanovsky I V, Atkins E M, Lu J B, Filev D P, Bai Y C. Road disturbance estimation and cloud-aided comfort-based route planning. IEEE Transactions on Cybernetics, 2017, 47(11): 3879−3891 doi: 10.1109/TCYB.2016.2587673 [185] Mühlbacher-Karrer S, Mosa A H, Faller L M, Ali M, Hamid R, Zangl H, et al. A driver state detection system — combining a capacitive hand detection sensor with physiological sensors. IEEE Transactions on Instrumentation and Measurement, 2017, 66(4): 624−636 doi: 10.1109/TIM.2016.2640458 [186] 郭孔辉. 预瞄跟随理论与人-车闭环系统大角度操纵运动仿真. 汽车工程, 1992, 14(1): 1−11Guo Kong-Hui. Preview follower theory and simulations of large angle cornering motion of a man-vehicle system. Automotive Engineering, 1992, 14(1): 1−11 [187] Qu T, Chen H, Cao D P, Guo H Y, Gao B Z. Switching-based stochastic model predictive control approach for modeling driver steering skill. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 365−375 doi: 10.1109/TITS.2014.2334623 [188] Qin L J, Wang T. Design and research of automobile anti-collision warning system based on monocular vision sensor with license plate cooperative target. Multimedia Tools and Applications, 2017, 76(13): 14815−14828 doi: 10.1007/s11042-016-4042-6 [189] Glaser S, Vanholme B, Mammar S, Gruyer D, Nouvelière L. Maneuver-based trajectory planning for highly autonomous vehicles on real road with traffic and driver interaction. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 589−606 doi: 10.1109/TITS.2010.2046037 [190] Enache N M, Mammar S, Netto M, Lusetti B. Driver steering assistance for lane-departure avoidance based on hybrid automata and composite Lyapunov function. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(1): 28−39 doi: 10.1109/TITS.2009.2026451 [191] Lv C, Liu Y H, Hu X S, Guo H Y, Cao D P, Wang F Y. Simultaneous observation of hybrid states for cyber-physical systems: a case study of electric vehicle powertrain. IEEE Transactions on Cybernetics, 2018, 48(8): 2357−2367 doi: 10.1109/TCYB.2017.2738003 [192] Petermeijer S M, Abbink D A, De Winter J C F. Should drivers be operating within an automation-free bandwidth? Evaluating haptic steering support systems with different levels of authority. Human Factors: The Journal of the Human Factors and Ergonomics Society, 2015, 57(1): 5−20 doi: 10.1177/0018720814563602 [193] Anderson S J, Walker J M, Iagnemma K. Experimental performance analysis of a homotopy-based shared autonomy framework. IEEE Transactions on Human-Machine Systems, 2014, 44(2): 190−199 doi: 10.1109/TSMC.2014.2298383 [194] Gong X, Guo Y H, Feng Y H, Sun J, Zhao D. Evaluation of the energy efficiency in a mixed traffic with automated vehicles and human controlled vehicles. In: Proceedings of 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, USA: IEEE, 2018. 1981−1986 [195] Rios-Torres J, Malikopoulos A A. Impact of partial penetrations of connected and automated vehicles on fuel consumption and traffic flow. IEEE Transactions on Intelligent Vehicles, 2018, 3(4): 453−462 doi: 10.1109/TIV.2018.2873899 [196] Zhao D, Lam H, Peng H, Bao S, LeBlanc D J, Nobukawa K, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(3): 595−607 doi: 10.1109/TITS.2016.2582208 [197] Zhao D, Huang X N, Peng H, Lam H, LeBlanc D J. Accelerated evaluation of automated vehicles in car-following maneuvers. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 733−744 doi: 10.1109/TITS.2017.2701846 [198] Feng Y H, Yu C H, Xu S B, Liu H X, Peng H. An augmented reality environment for connected and automated vehicle testing and evaluation. In: Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu, China: IEEE, 2018. 1549−1554 [199] 王飞跃. 平行控制: 数据驱动的计算控制方法. 自动化学报, 2013, 39(4): 293−302Wang Fei-Yue. Parallel control: a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293−302 [200] Li L, Wang X, Wang K F, Lin Y L, Xin J M, Chen L, et al. Parallel testing of vehicle intelligence via virtual-real interaction. Science Robotics, 2019, 4(28): Article No.eaaw4106 doi: 10.1126/scirobotics.aaw4106 [201] 陈伟宏, 安吉尧, 李仁发, 李万里. 深度学习认知计算综述. 自动化学报, 2017, 43(11): 1886−1897Chen Wei-Hong, An Ji-Yao, Li Ren-Fa, Li Wan-Li. Review on deep-learning-based cognitive computing. Acta Automatica Sinica, 2017, 43(11): 1886−1897 [202] Agaram V, Barickman F, Fahrenkrog F, Griffor E, Muharemovic I, Peng H, et al. Validation and verification of automated road vehicles. Road Vehicle Automation 3. Cham: Springer, 2016. 201−210 [203] Kalra N, Paddock S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability?. Transportation Research Part A: Policy and Practice, 2016, 94: 182−193 doi: 10.1016/j.tra.2016.09.010 [204] Wachenfeld W, Winner H. The new role of road testing for the safety validation of automated vehicles. Automated Driving: Safer and More Efficient Future Driving. Cham: Springer, 2017. 419−435 [205] Pütz A, Zlocki A, Küfen J, Bock J, Eckstein L. Database approach for the sign-off process of highly automated vehicles. In: Proceedings of the 25th International Technical Conference on the Enhanced Safety of Vehicles (ESV). Detroit, USA, 2017. [206] He H W, Lu Y M, Lou Y. Virtual reality based intelligent vehicle modeling in driving SIMULATION system. In: Proceedings of 7th International Conference on Computer-Aided Industrial Design and Conceptual Design. Hangzhou, China: IEEE, 2006. 1−5 [207] Mueggler E, Rebecq H, Gallego G, Delbruck T, Scaramuzza D. The event-camera dataset and simulator: event-based data for pose estimation, visual odometry, and SLAM. The International Journal of Robotics Research, 2017, 36(2): 142−149 doi: 10.1177/0278364917691115 [208] Swanson K S, Brown A A, Brennan S N, LaJambe C M. Extending driving simulator capabilities toward hardware-in-the-loop testbeds and remote vehicle interfaces. In: Proceedings of the 2013 IEEE Intelligent Vehicles Symposium Workshops (IV Workshops). Gold Coast, Australia: IEEE, 2013. 115−120 -

 下载:
下载:


图(6)
计量
- 文章访问数: 27194
- HTML全文浏览量: 3059
- PDF下载量: 1418
- 被引次数: 0
