

Multi-level Dynamic Principal Component Analysis for Abnormality Diagnosis of Fused Magnesia Furnaces
-
摘要: 电熔镁熔炼过程中的异常工况(如半熔化工况)直接影响产品质量、威胁人员和生产安全, 有必要及时诊断. 但与异常直接相关的超高温熔池温度(>2850 ℃)难以利用温度传感器检测, 目前现场主要依靠工人在定期巡检时人眼观察炉壁来诊断, 工作强度大、安全度低、诊断不及时. 针对上述问题, 本文提出一种炉体动态图像驱动的电熔镁炉异常工况实时诊断方法. 结合电熔镁炉熔炼各区域温度分布的空间特征、正常工况下熔炼温度变化和水雾扰动引入的图像时序特征、以及异常工况下温度异常区域持续发亮扩大的特征, 在对炉体动态图像进行空间多级划分的基础上, 提出了一种多级动态主元分析(Multi-level dynamic principal component analysis, MLDPCA) 动态图像分块建模方法. 在此基础上, 提出基于MLDPCA的逐级诊断方法与基于贡献图的异常定位方法. 最后, 采用某电熔镁生产现场的实际图像进行方法验证, 结果表明了所提方法的有效性.Abstract: The abnormalities during the melting process of fused magnesia furnace (FMF) such as semimolten situation may significantly affect the product quality, the safety of personnel and manufacturing process. The abnormal condition diagnosis deserves more attentions. However, the ultra-high temperature within the melting zone of the FMF is not measurable, that makes the diagnosis of FMF abnormality be difficult. The practitioners can only perform occasional visual inspections which often fail to detect the abnormalities in time. In order to resolve this challenge, this paper proposes a novel dynamic image analysis based real-time abnormality diagnosis method for the FMF. The proposed method exploits the spatial and temporal characteristics of temperature fluctuation in FMF in normal condition as well as the partial glowing of the furnace wall and continuous expanding of the glowing area in abnormal conditions. In order to extract these spatial and temporal features from the dynamic images, a new multi-level dynamic principal component analysis (MLDPCA) algorithm is developed. A hierarchical monitoring method is then proposed to perform the abnormality diagnosis and locate the abnormality by using the MLDPCA based contribution plot. The application result on a practical FMF using the collected field images has demonstrated the effectiveness of the proposed method.1) 收稿日期 2019-04-22 录用日期 2019-07-30 Manuscript received April 22, 2019; accepted July 30, 2019 国家自然科学基金(61991401, U20A20189, 61673097, 61833004), 兴辽英才计划项目(XLYC1907049, XLYC1808001), 中央高校基本科研业务费(N180802004)资助 Supported by National Natural Science Foundation of China (61991401, U20A20189, 61673097, 61833004), LiaoNing Revitalization Talents Program (XLYC1907049, XLYC1808001), the Fundamental Research Funds for the Central Universities (N180802004) 本文责任编委 杨浩 Recommended by Associate Editor YANG Hao 1. 东北大学流程工业综合自动化国家重点实验室 沈阳 110819 中国 2. 英国谢菲尔德大学自动控制和系统工程系 谢菲尔德市S1 3JD 英国 1. State Key Laboratory of Synthetical Automation for Process2) Industries, Northeastern University, Shenyang 110819, China 2. Department of Automatic Control and Systems Engineering, University of Sheffield, Sheffield S1 3JD, UK
-
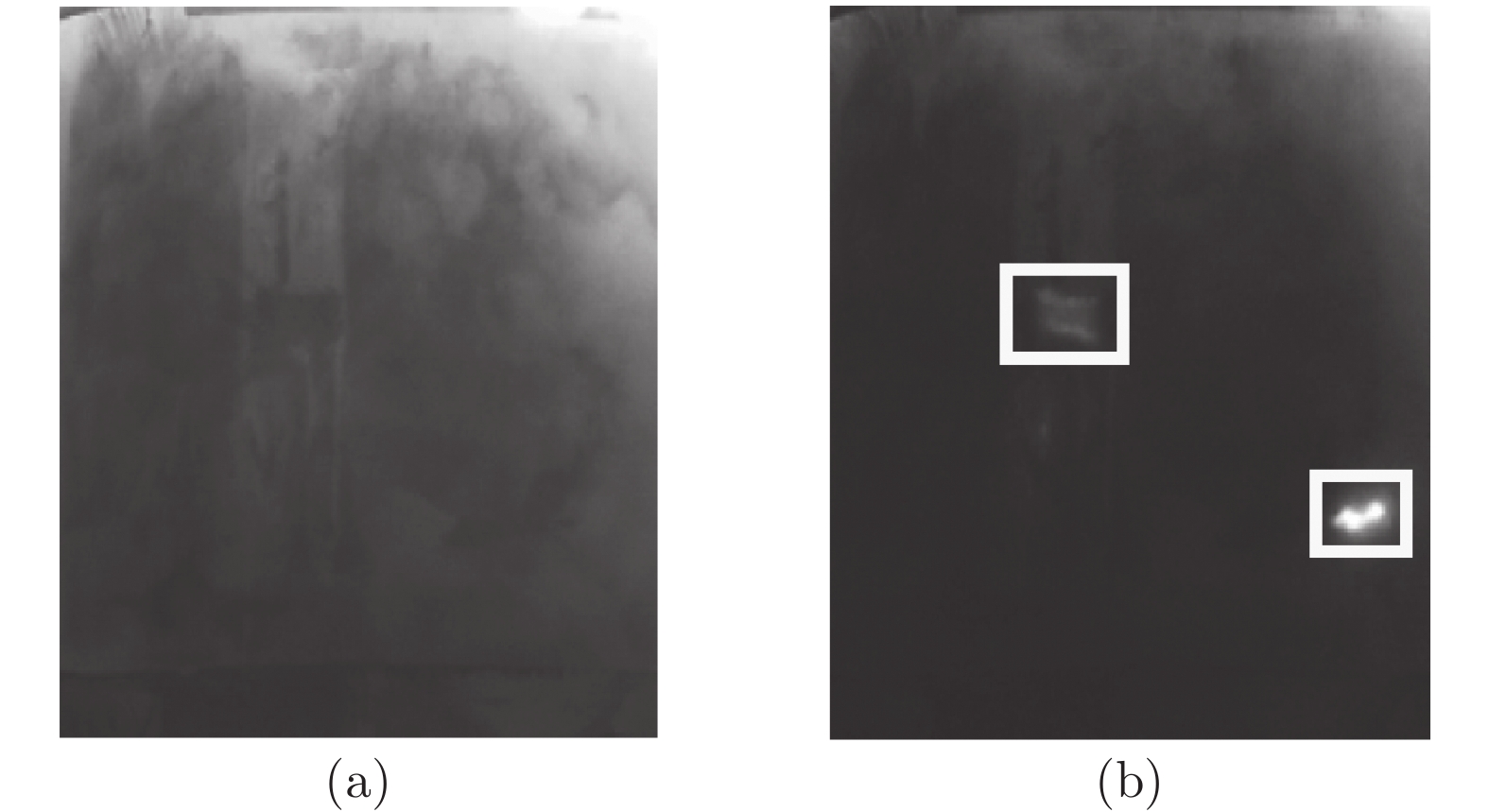
图 2 (a)正常工况图像; (b)半熔化工况图像
Fig. 2 (a) Image of normal situation; (b) Image of semimolten situation
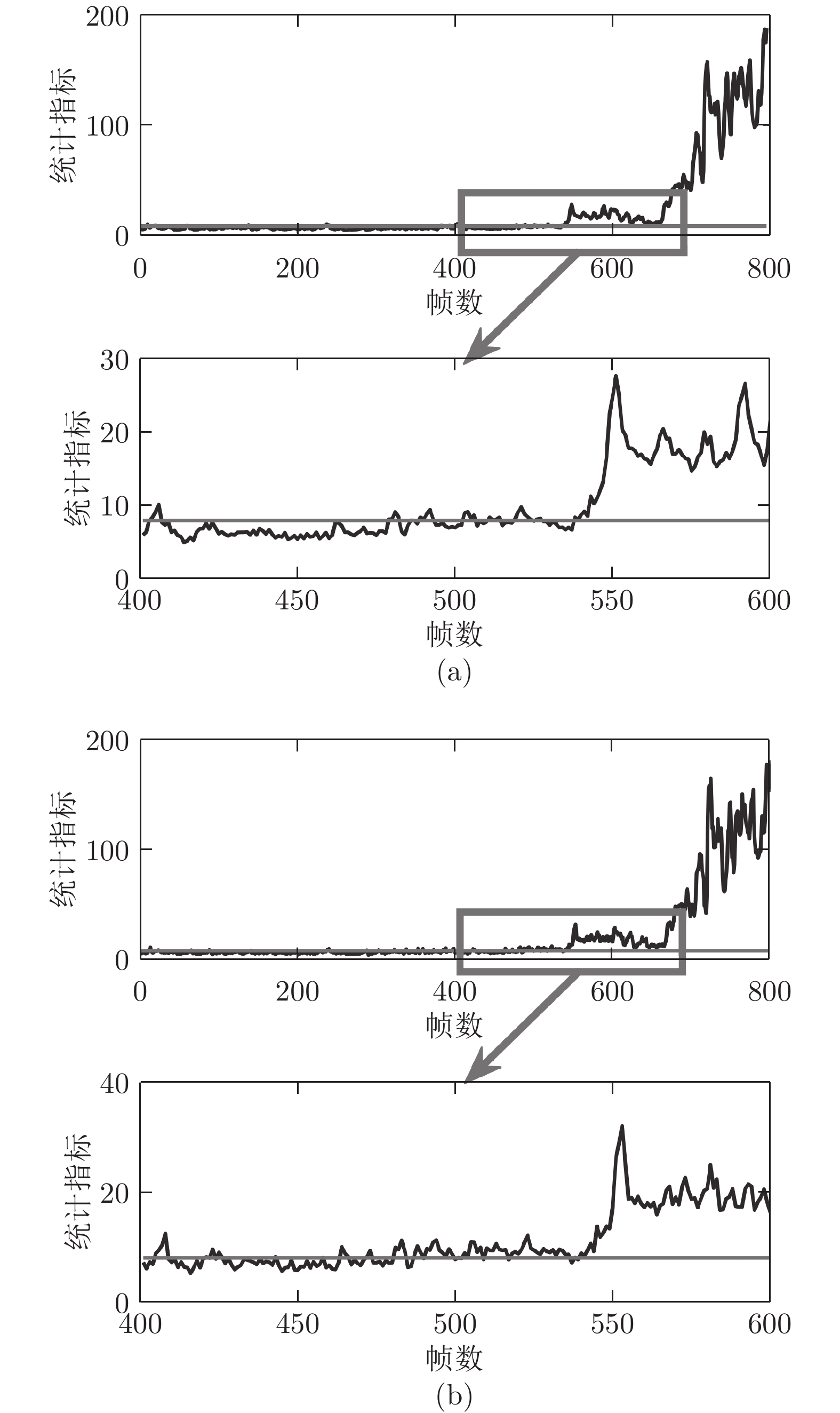
图 5 (a) MLDPCA诊断结果; (b)多级PCA诊断结果
Fig. 5 (a) Diagnosis result of MLDPCA; (b) Diagnosis result of MLPCA
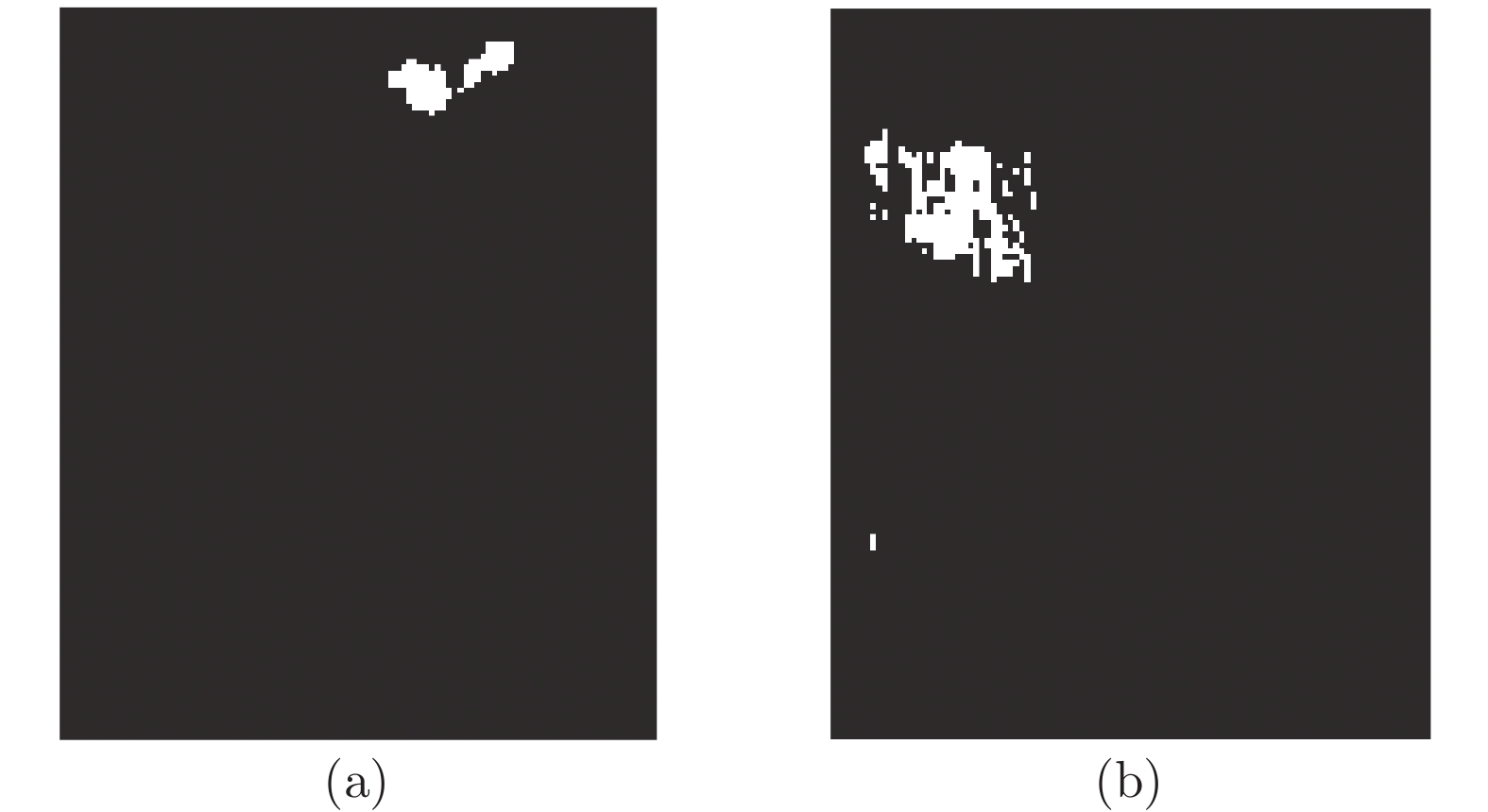
图 7 (a) 第540帧时第9块贡献图; (b) 第700帧时第5块贡献图
Fig. 7 (a) Contribution plot in 9th block at 540th; (b) Contribution plot in 5th block at 700th
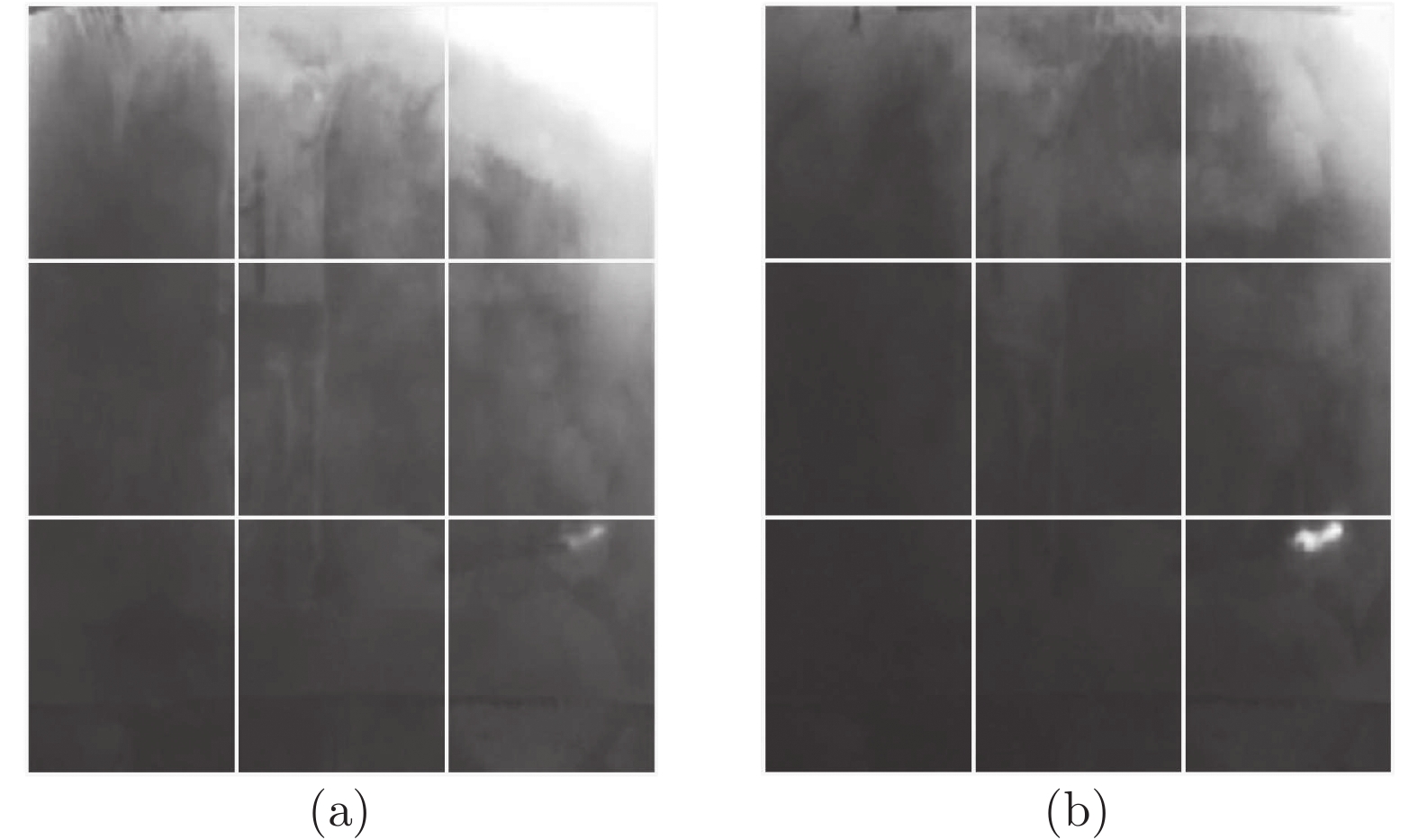
图 8 (a) 第540帧时炉壁图像; (b) 第700帧时炉壁图像
Fig. 8 (a) Image at 540th frame; (b) Image at 700th frame
表 1 电熔镁炉半熔化工况诊断误报率
Table 1 False positive rates of semimolten for FMF
诊断方法 误报率 (不加时间延迟诊断) 误报率 (加时间延迟诊断) 多级 PCA 35.17 % 8.69 % 本文方法 7.63 % 0.1 %  下载: 导出CSV
下载: 导出CSV
表 2 建模时间与诊断时间
Table 2 Cost time of modeling and online diagnosis
诊断方法 建模时间 (秒) 诊断时间 (秒) 多级 PCA 54.95 0.87 本文方法 145.14 0.94
下载: 导出CSV
-
[1] 罗仙平, 李建康, 徐徽, 王金庆, 逯登琴, 张贤. 电熔镁砂制备工艺及熔炼过程. 盐业与化工, 2016, 45(08): 8-13Luo Xian-Ping, Li Jian-Kang, Xu Hui, Wang Jin-Qing, Lu Deng-Qing, Zhang Xian. Preparation and melting process of fused magnesia. Journal of Salt and Chemical Industr, 2016, 45(08): 8-13 [2] 吴志伟, 柴天佑, 吴永建. 电熔镁砂产品单吨能耗混合预报模型. 自动化学报, 2013, 39(12): 2002-2011Wu Zhi-wei, Chai Tian-you, Wu Yong-jian. A hybrid prediction model of energy consumption per ton for fused magnesia. Acta Automatica Sinica, 2013, 39(12): 2002-2011 [3] Zhang X, Xue D F, Xu D L, Feng X Q, Wang J Y. Growth of large MgO single crystals by an arc-fusion method. Journal of Crystal Growth, 2005, 280(6): 234-238 [4] Zhang X, Xue D F, Wang J Y, Feng X Q. Improved growth technology of large MgO single crystals. Journal of Crystal Growth, 2006, 292(7): 505-509 [5] Wu Z W, Wu Y J, Chai T Y, Sun J. Data-driven abnormal condition identi cation and self-healing control system for fused magnesium furnace. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1703-1715 doi: 10.1109/TIE.2014.2349479 [6] Chai T Y, Wu Z W, Wang H. A CPS based optimal operational control system for fused magnesium furnace. In: Proceedings of the 20th world Congress of the International Federation of Automatic Control. Toulouse, France: IFAC, 2013. 50(1): 14992−14999 [7] 孔德志, 刘强, 郎志强. 基于图像动态相关度的电熔镁炉半熔化异常工况诊断, 中国过程控制会议, 沈阳, 中国, 2018Kong De-Zhi, Liu Qiang, Lang Zhi-Qiang. Dynamic correlation based semi-melting condition diagnosis for fused magnesia furnaces. In: Proceedings of the 2018 Chinese Process Control Conference. Shenyang, China, 2018 [8] 卢绍文, 王克栋, 吴志伟, 李鹏琦, 郭章. 基于深度卷积网络的电熔镁炉欠烧工况在线识别. 控制与决策, 2017, 23(9): 1-8Lu Shao-Wen, Wang Ke-Dong, Wu Zhi-Wei, Li Peng- Qi, Guo Zhang. Online detection of semi-molten of fused magnesium furnace based on deep convolutional neural network. Control and Decision, 2017, 23(9): 1-8 [9] 吴高昌, 刘强, 柴天佑, 秦泗钊. 基于时序图像深度学习的电熔镁炉异常工况诊断. 自动化学报, 201945(8): 1475-1485Wu Gao-Chang, Liu Qiang, Chai Tian-You, Qin S Joe. Abnormal condition diagnosis based on deep learning of image sequences for fused magnesium furnaces. Acta Automatica Sinica, 2019, 45(8): 1475-1485 [10] Qin S J. Data-driven fault detection and diagnosis for complex industrial processes. In: Proceedings of the 7th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes. Barcelona, Spain: IFAC, 2009. 42(8): 1115−1125 [11] 纪洪泉, 何潇, 周东华. 基于多元统计分析的故障检测方法. 上海交通大学学报, 2015, 49(06): 842-848Ji Hong-Quan. He Xiao, Zhou Dong-Hua. Fault detection techniques based on multivariate statistical analysis. Journal of Shanghai Jiao Tong University, 2015, 49(06): 842-848 [12] 刘强, 柴天佑, 秦泗钊, 赵立杰. 基于数据和知识的工业过程监视及故障诊断综述. 控制与决策, 2010, 25(06): 801-807Liu Qiang, Chai Tian-You, Qin S Joe, Zhao Li-Jie. Progress of data-driven and knowledge-driven process monitoring and fault diagnosis for industry process. Control and Decision, 2010, 25(06): 801-807 [13] 贾宝柱, 贾志涛, 余培文. 数据驱动的船舶智能故障诊断方法, 控制工程, 2019 26(10): 1892-1898Jia Bao-zhu, Jia Zhi-tao, Yu Pei-wen. Data-deiven vessel smart fault diagnosis method. Control Engineering of China, 2019, 26(10): 1892-1898 [14] 陈晓露, 王瑞璇, 王晶, 周靖林. 基于混合型判别分析的工业过程监控及故障诊断, 自动化学报, 2020, 46(8): 1600−1614Chen Xiao-Lu, Wang Rui-Xuan, Wang Jing, Zhou Jing-Lin. Industrial process monitoring and fault diagnosis based on hybrid discriminant analysis. Acta Automatica Sinica, 2020, 46(8): 1600−1614 [15] Jia R X, Wang J, Zhou J L. Fault diagnosis of industrial process based on the optimal parametric t-distributed stochastic neighbor embedding. Science China Information Sciences, 2021, 64: 159204 [16] Ku W, Storer R H, Georgakis C. Disturbance detection and isolation by dynamic principal component analysis. Chemometrics and Intelligent Laboratory Systems, 1995, 30(1): 179-196 doi: 10.1016/0169-7439(95)00076-3 [17] Chen J, Liu K C. On-line batch process monitoring using dynamic PCA and dynamic PLS models. Chemical Engineering Science, 2002, 57(1): 63-75 doi: 10.1016/S0009-2509(01)00366-9 [18] Lu N, Yao Y, Gao F, Wang F. Two-dimensional dynamic PCA for batch process monitoring. AIChE Journal, 2005, 51(12): 3300-3304 doi: 10.1002/aic.10568 [19] Lin W, Qian Y, Li X. Nonlinear dynamic principal component analysis for on-line process monitoring and diagnosis. Computers and Chemical Engineering, 2000, 24(2): 423-429 [20] Li G, Liu B, Qin S J, Zhou D H. Dynamic latent variable modeling for statistical process monitoring. In: Proceedings of the 18th World Congress The International Federation of Automatic Control. Milano, Italy: IFAC, 2011. 44(1): 12886−12891 [21] Li G, Qin S J, Zhou D H. A new method of dynamic latent-variable modeling for process monitoring. IEEE Transactions on Industrial Electronics, 2014, 61(11): 6438-6448 doi: 10.1109/TIE.2014.2301761 [22] Dong Y N, Qin S J. A novel dynamic PCA algorithm for dynamic data modeling and process monitoring. Journal of Process Control, 2018, 67(7): 1-11 [23] Liu Q, Qin S J, Chai T Y. Decentralized fault diagnosis of continuous annealing processes based on multilevel PCA. IEEE Transactions on Automation Science and Engineering, 2013, 10(3): 687-698 doi: 10.1109/TASE.2012.2230628 [24] Alcala F, Qin S J. Reconstruction-based contribution for process monitoring. Automatica, 2009, 7(45): 1593-1600 [25] Gonzalez R C, Woods R E. Digital image processing. Englewood: Prentice Hall, 2002. 282−348 [26] Reinhard E, Ashikmin M, Gooch B, Shirley P. Color Transfer between Images. IEEE Computer Graphics & Applications, 2001, 21(5): 34-41 [27] Izadi I, Shah S L, Shook D S, Kondaveeti S R, Chen T W. A framework for optimal design of alarm systems. In: Proceedings of the 7th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes. Barcelona, Spain: IFAC, 2009. 42(8): 651−656 -

 下载:
下载:




计量
- 文章访问数: 1166
- HTML全文浏览量: 378
- PDF下载量: 242
- 被引次数: 0
