

-
摘要: 针对电力巡检机器人(Power-line inspection robot, PLIR)的平衡调节问题, 设计了广义二型模糊逻辑控制器(General type-2 fuzzy logic controller, GT2FLC); 针对GT2FLC中隶属函数参数难以确定的问题, 通过模糊粒子群(Fuzzy particle swarm optimization, FPSO)算法来优化隶属函数参数. 将GT2FLC的控制性能与区间二型模糊逻辑控制器(Interval type-2 fuzzy logic controller, IT2FLC)和一型模糊逻辑控制器(Type-1 fuzzy logic controller, T1FLC) 的控制性能进行对比. 除此之外, 还考虑了外部干扰对三种控制器控制效果的影响. 仿真结果表明, GT2FLC具有更好的性能和处理不确定性的能力.
-
关键词:
- 广义二型模糊逻辑控制器 /
- 隶属函数 /
- 模糊粒子群 /
- 电力巡检机器人
Abstract: A general type-2 fuzzy logic controller (GT2FLC) is designed to control the balance of a power-line inspection robot (PLIR). Because it is difficult to determine parameters of membership function in GT2FLC, the fuzzy particle swarm optimization (FPSO) is applied to optimize the parameters of membership function in GT2FLC. The performance of GT2FLC is compared with the performance of the type-1 fuzzy logic controller (T1FLC) and interval type-2 fuzzy logic controller (IT2FLC). Furthermore, the influence of external disturbances on the control effect of the PLIR is considered. According to simulations, the performance of GT2FLC is better than performance of other controllers, and the GT2FLC has better ability to deal with uncertainties. -
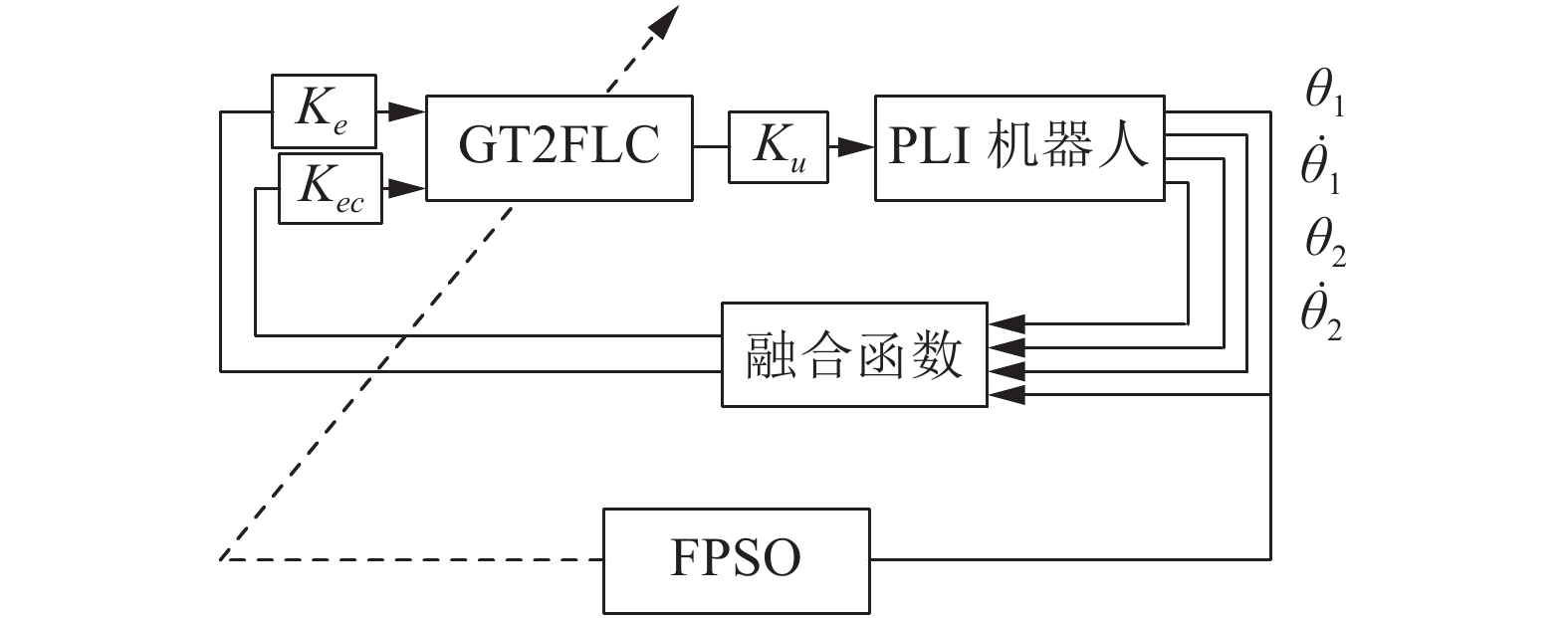
图 6 PLIR平衡控制和优化原理图
Fig. 6 The diagram of balance control and optimization for the PLIR
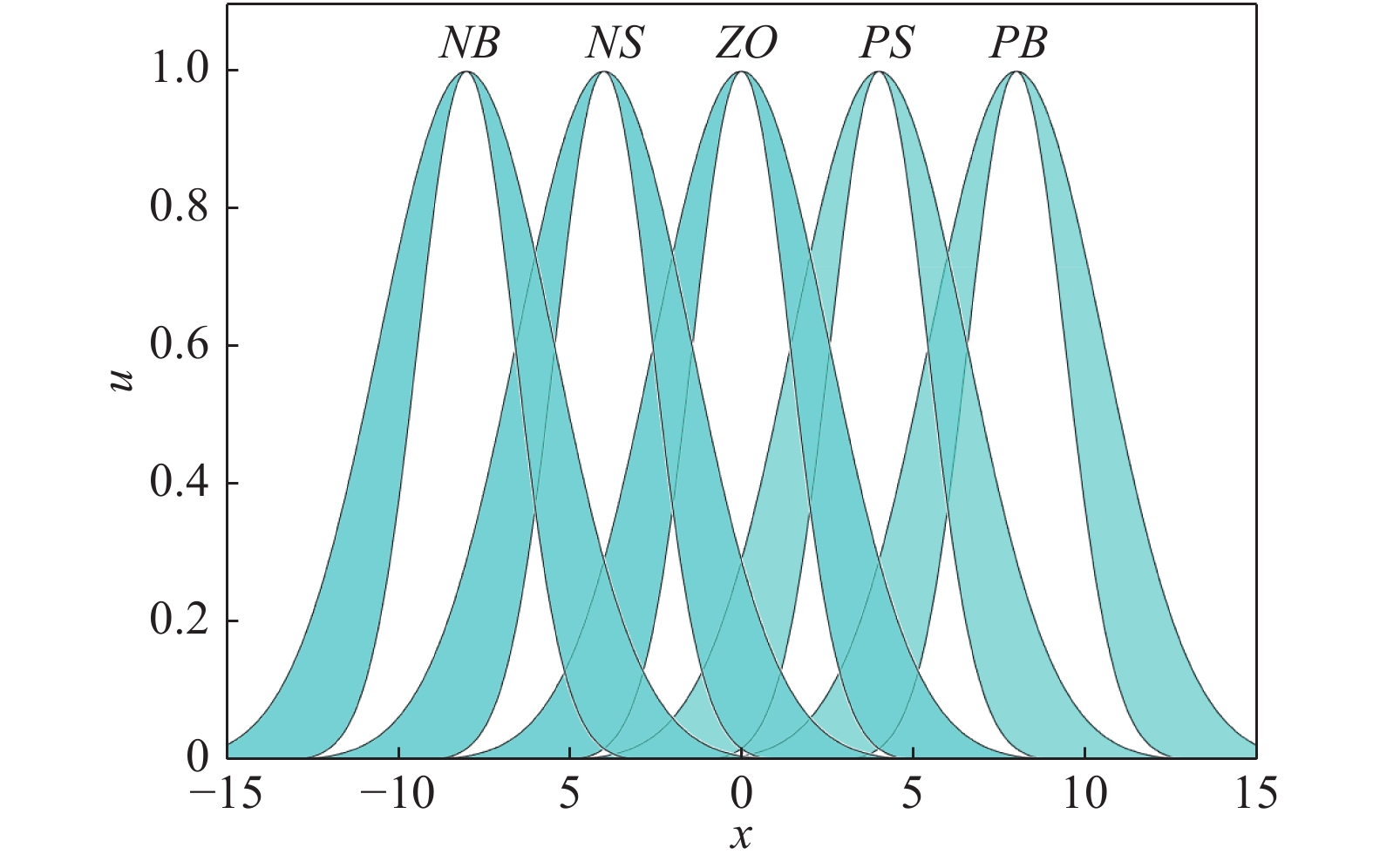
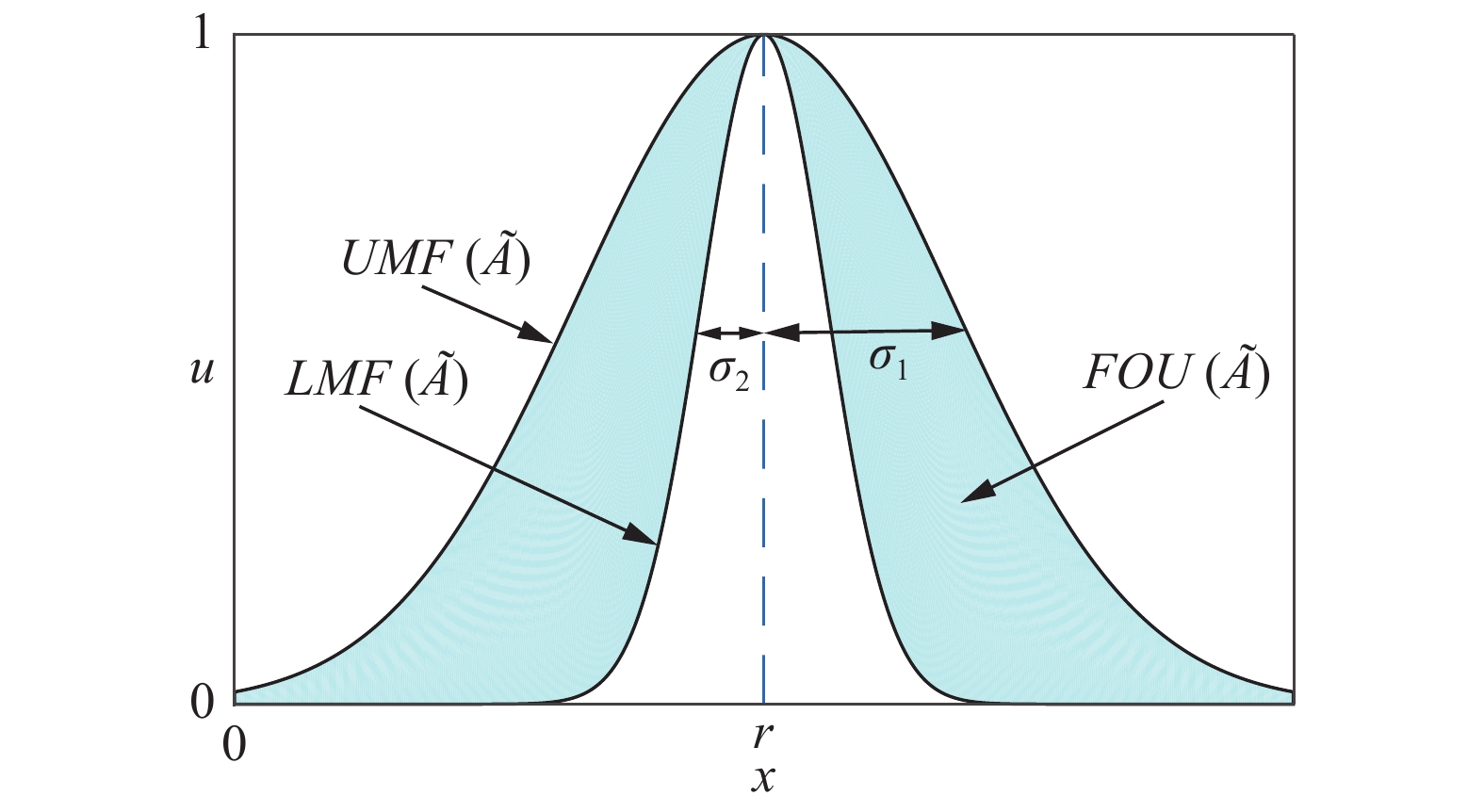
图 8 优化前
${{\tilde \theta }_1}$ 对应的FOUFig. 8 The FOU for
${{\tilde \theta }_1}$ without optimization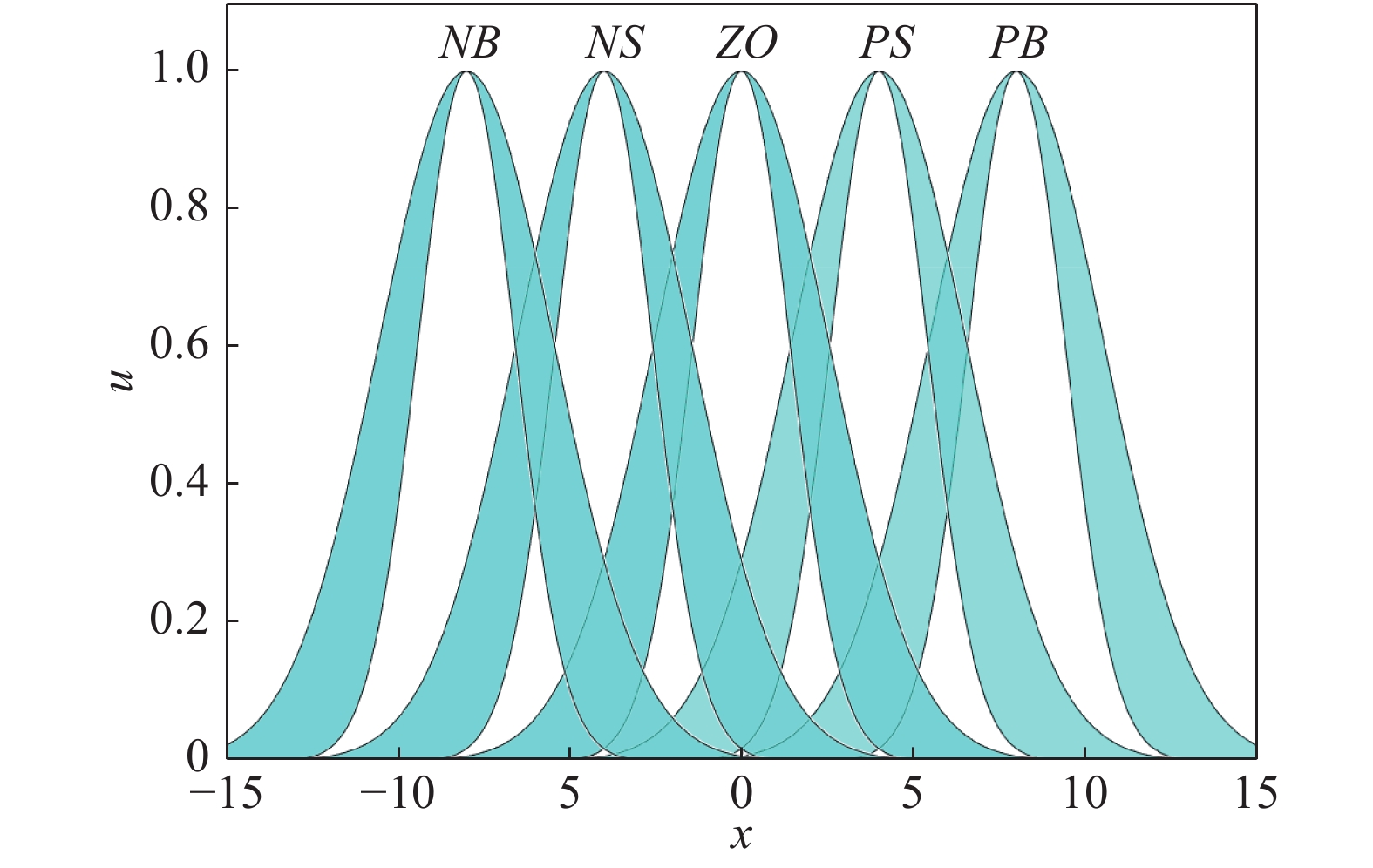
图 9 优化前
${{{\dot{\tilde{\theta }}}}_{2}}$ 对应的FOUFig. 9 FOU for
${{{\dot{\tilde{\theta }}}}_{2}}$ without optimization
图 10 优化后
${{\tilde \theta }_1}$ 对应的FOUFig. 10 The FOU for
${{\tilde \theta }_1}$ with optimization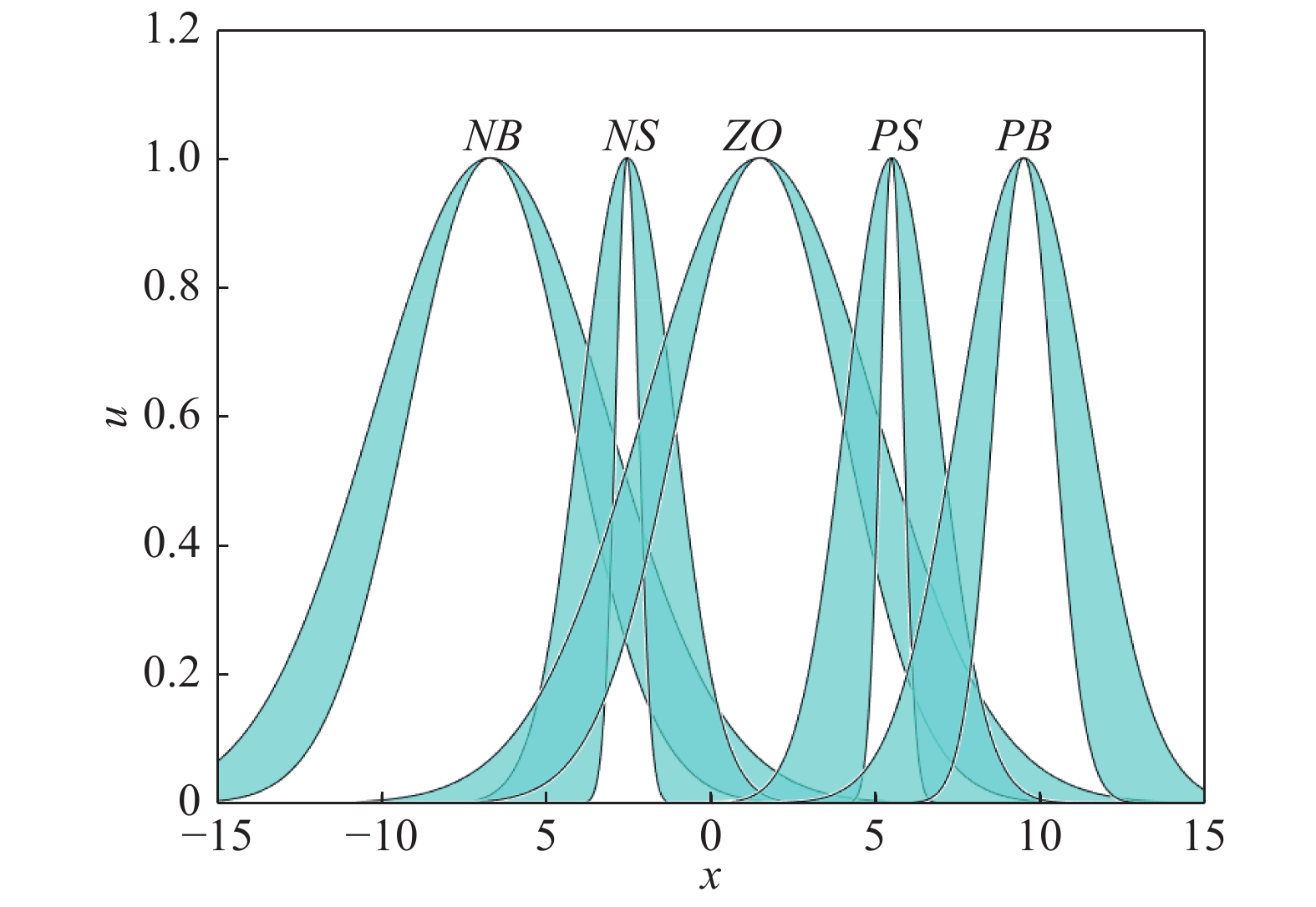
图 11 优化后
${{{\dot{\tilde{\theta }}}}_{2}}$ 对应的FOUFig. 11 The FOU for
${{{\dot{\tilde{\theta }}}}_{2}}$ with optimization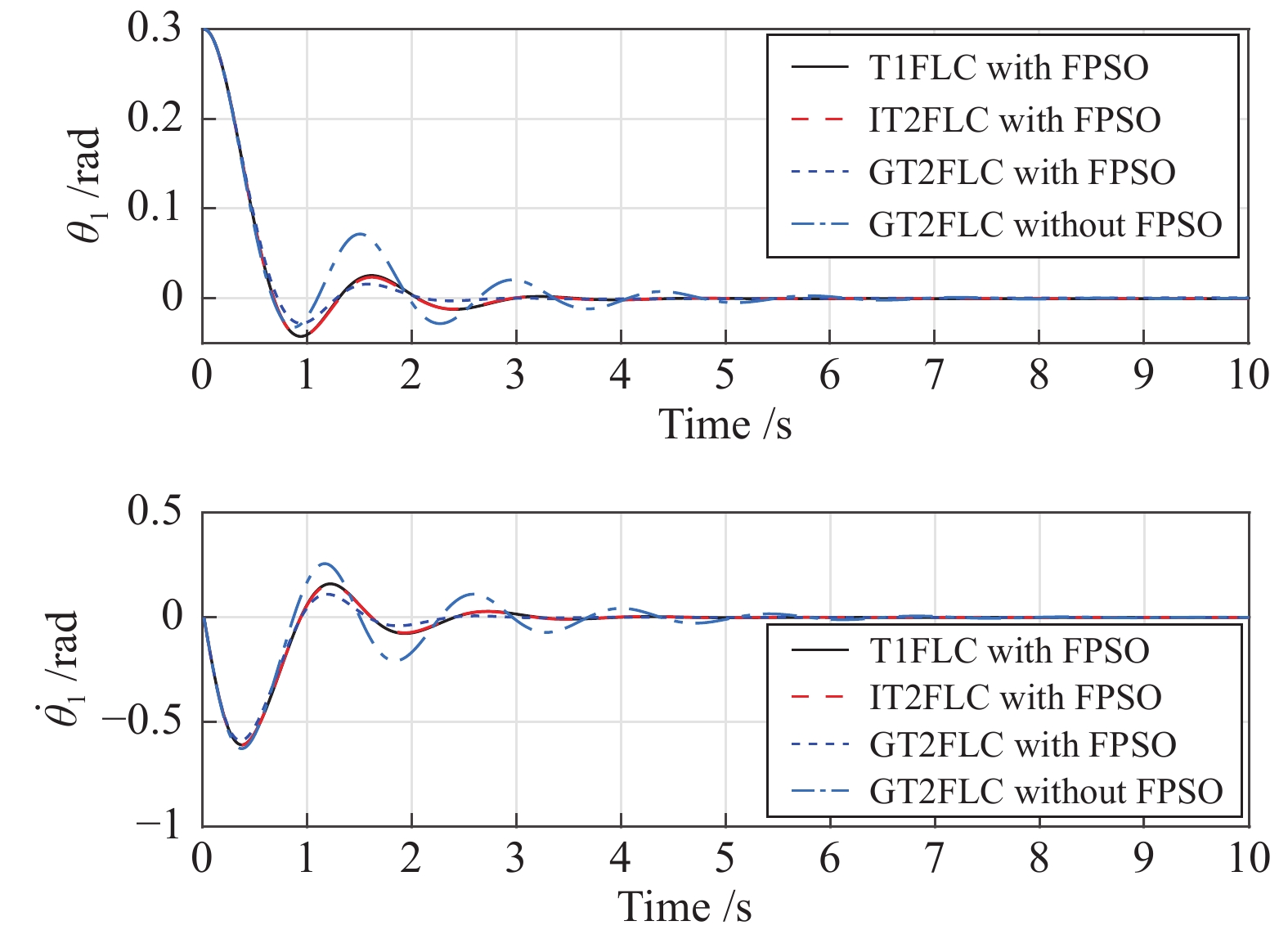
图 12 无干扰下
$\theta_1$ 和$\dot{\theta}_1$ 的响应Fig. 12 Responses of
$\theta_1$ and$\dot{\theta}_1$ without disturbance
图 13 无干扰下
$\theta_2$ 和$\dot{\theta}_2$ 的响应Fig. 13 Responses of
$\theta_2$ and$\dot{\theta}_2$ without disturbance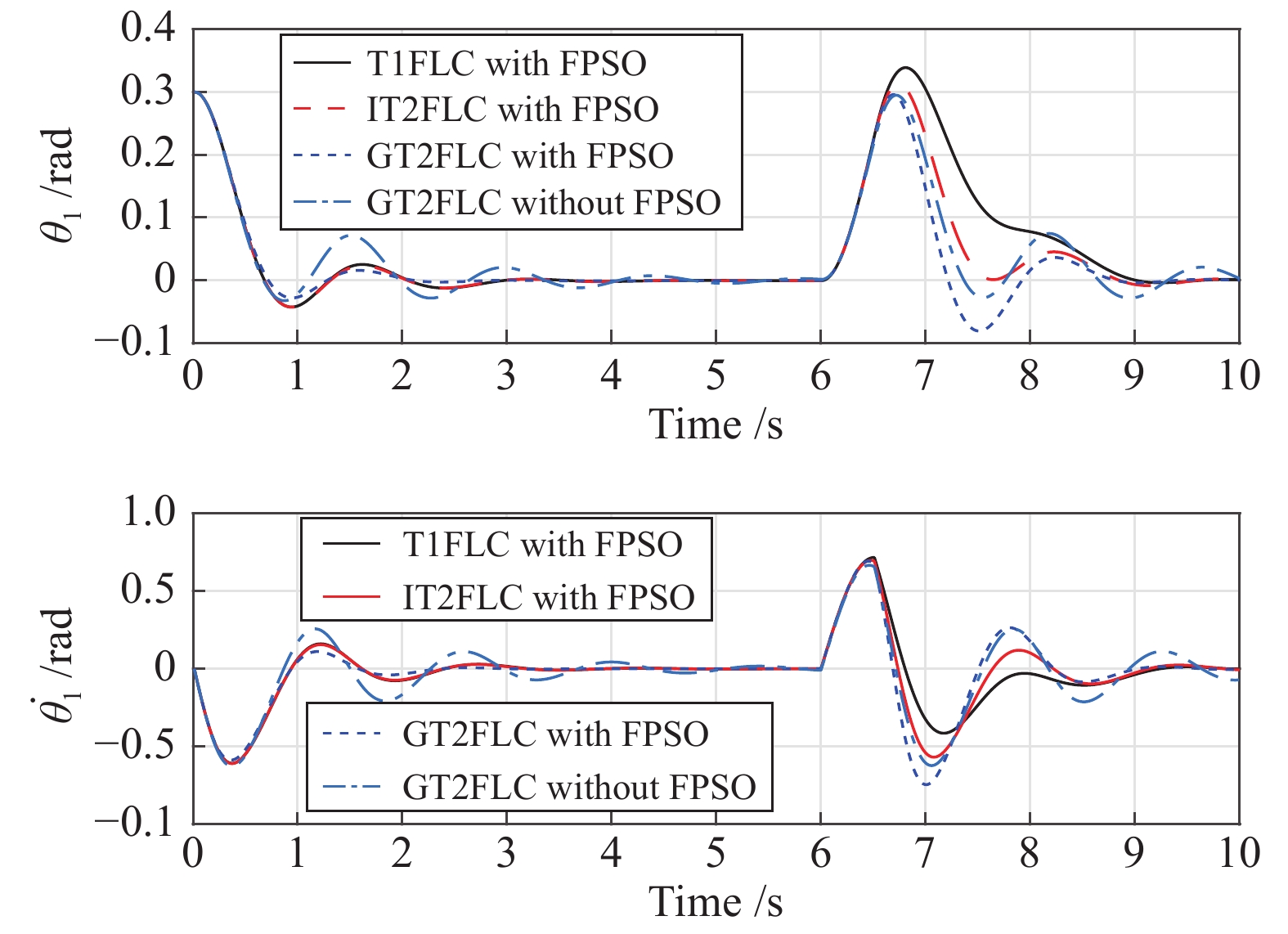
图 14 有干扰下
$\theta_1$ 和$\dot{\theta}_1$ 的响应Fig. 14 Responses of
$\theta_1$ and$\dot {\theta}_1$ with disturbances
图 15 有干扰下
$\theta_2$ 和$\dot{\theta}_2$ 的响应Fig. 15 Responses of
$\theta_2$ and$\dot{\theta}_2$ with disturbances表 1 PLIR对应参数值
Table 1 Values of parameters for the PLI robot
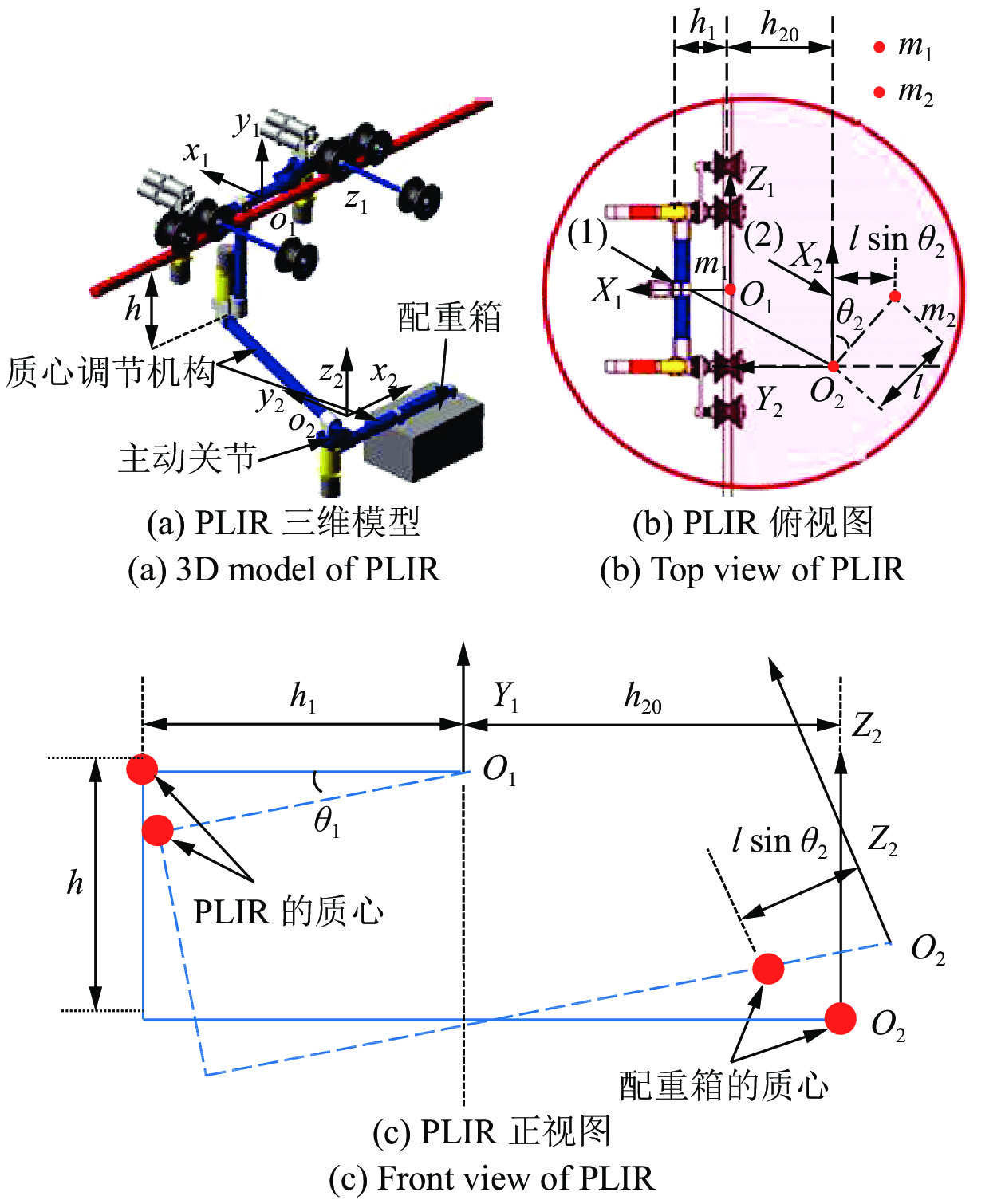
参数 参数值 参数 参数值 $m_1\, ({\rm{kg} })$ 63 $m_2\,({\rm{kg} })$ 27 $h_1\,({\rm{m} })$ 0.18 $h_{20}\,({\rm{m} })$ 0.42 $l \,({\rm{m} })$ 0.5 $h\,({\rm{m} })$ 0.5  下载: 导出CSV
下载: 导出CSV
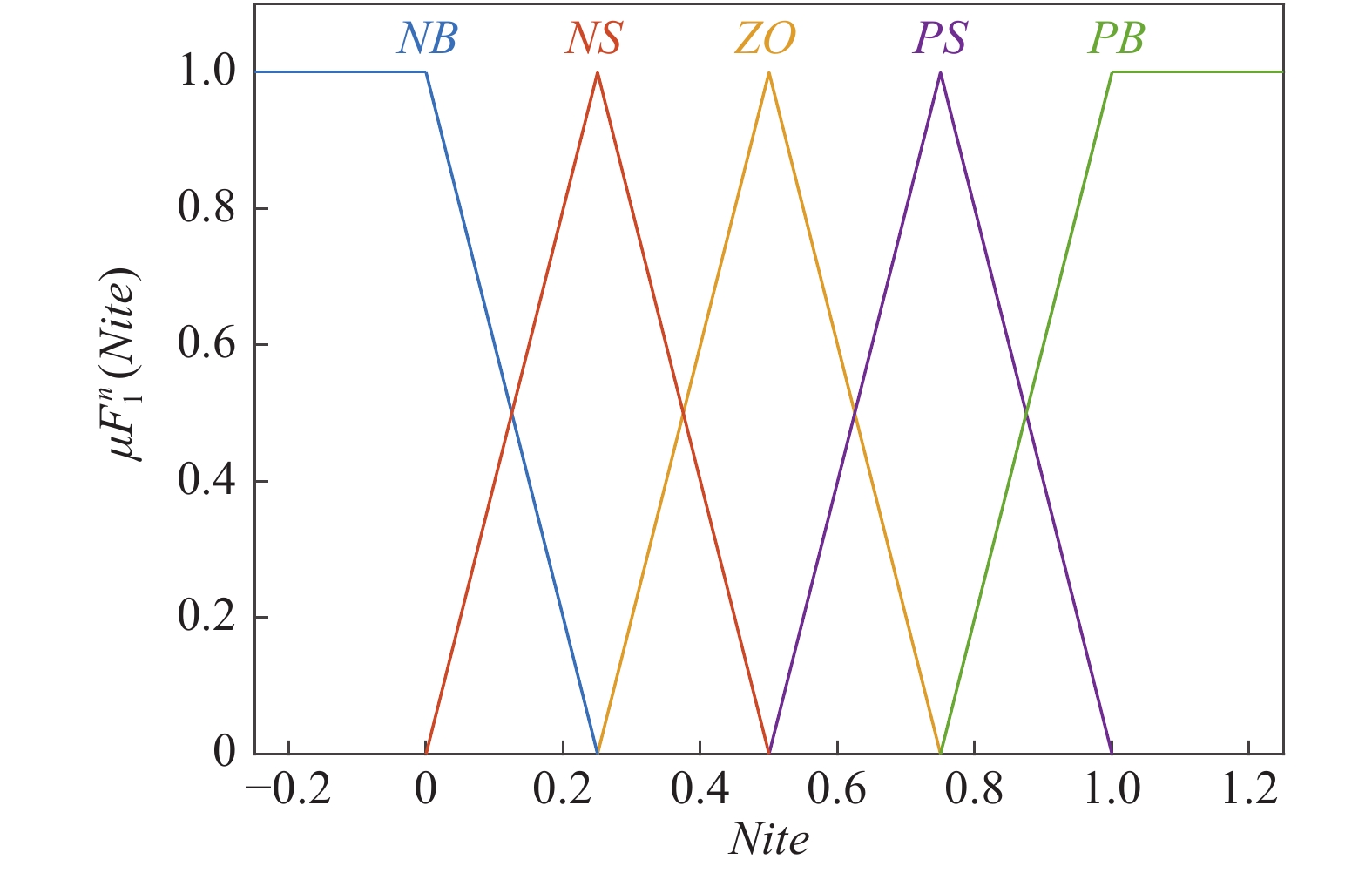
表 2 FPSO惯性权重调整模糊规则表
Table 2 The rulebase of adjustment for inertia weight in FPSO
$\omega$ $Nite$ NB NS ZO PS PB $Nfit$ NB ZO PS PS PB PB NS NS ZO PS PB PB ZO NS NS ZO PS PS PS NB NB NS ZO PS PB NB NB NS NS ZO
下载: 导出CSV
表 3 PLIR平衡调节模糊规则表
Table 3 The rulebase of balance adjustment for the PLIR
u2 ${{{\tilde \theta }_1}}$ NB NS ZO PS PB ${{{\dot{\tilde{\theta }}}}_{1}}$ NB PB PB PS PS ZO NS PB PB PS ZO NS ZO PS PS ZO NS NS PS PS ZO NS NB NB PB ZO NS NS NB NB
下载: 导出CSV
表 4 无干扰下平均评价指标
Table 4 Average evaluation index without disturbance
控制器 ISE IAE ITAE T1FLC-PSO 0.02660 0.14820 0.08061 IT2FLC-PSO 0.02655 0.14238 0.06800 GT2FLC-PSO 0.02655 0.14290 0.06914 T1FLC-FPSO 0.02656 0.14534 0.07417 IT2FLC-FPSO 0.02653 0.14236 0.06732 GT2FLC-FPSO 0.02654 0.14127 0.06536
下载: 导出CSV
表 5 有干扰下平均评价指标
Table 5 Average evaluation index with disturbances
控制器 ISE IAE ITAE T1FLC-PSO 0.07380 0.39140 1.76303 IT2FLC-PSO 0.06907 0.37776 1.69851 GT2FLC-PSO 0.06856 0.37537 1.68996 T1FLC-FPSO 0.07376 0.38991 1.75956 IT2FLC-FPSO 0.06875 0.37773 1.69275 GT2FLC-FPSO 0.06857 0.37414 1.68423
下载: 导出CSV
-
[1] Dian S, Chen L, Hoang S, Pu M, Liu J. Dynamic balance control based on an adaptive gain-scheduled backstepping scheme for power-line inspection robots[J]. IEEE/CAA Journal of Automatica Sinica, 2017: 198-208. [2] Fu S Y, Zuo Q, Hou Z G, Liang Z Z, Ta, M, Jing F S, Fu X L. Unsupervised learning of categories from sets of partially matching image features for power line inspection robot. In: Proceedings of the 2008 IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence), Hong Kong, China: IEEE, 2008. 2596−2603 [3] Chen C, Wu G L, Wang Q, Hou X Z, Wang C J, Ye L J, et al. Design of the gripper for power lines inspection robot. In: Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China: IEEE, 2014. 3340−3344 [4] Katrasnik J, Pernus F, Likar B. A survey of mobile robots for distribution power line inspection[J]. IEEE Transactions on Power Delivery, 2010, 25(1): 485-493. doi: 10.1109/TPWRD.2009.2035427 [5] Montambault S, Pouliot N. Design and validation of a mobile robot for power line inspection and maintenance. In: Proceedings of the 6th International Conference on Field and Service, Berlin, Heidelberg, Germany: Springer, 2007. [6] Gulzar M A, Kumar K, Javed M A, M Sharif. High-voltage transmission line inspection robot. In: Proceedings of the 2018 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan: IEEE, 2018. 1−7 [7] Almutairi N B, Zribi M. On the sliding mode control of a ball on a beam system[J]. Nonlinear dynamics, 2010, 59(1-2): 221. doi: 10.1007/s11071-009-9534-8 [8] Ghommam J, Saad M. Backstepping-based cooperative and adaptive tracking control design for a group of underactuated AUVs in horizontal plan[J]. International Journal of Control, 2014, 87(5): 1076-1093. doi: 10.1080/00207179.2013.868605 [9] Li Y, Liu L, Feng G. Robust adaptive output feedback control to a class of non-triangular stochastic nonlinear systems[J]. Automatica, 2018, 89: 325-332. doi: 10.1016/j.automatica.2017.12.020 [10] Chang X H. Robust Nonfragile H1 Filtering of Fuzzy Systems With Linear Fractional Parametric Uncertainties[J]. IEEE Transactions on Fuzzy Systems, 2012, 20(6): 1001-1011. doi: 10.1109/TFUZZ.2012.2187299 [11] Xie X, Yue D, Peng C. Multi-instant observer design of discrete-time fuzzy systems: a ranking-based switching approach[J]. IEEE Transactions on Fuzzy Systems, 2017, 25(5): 1281-1292. doi: 10.1109/TFUZZ.2016.2612260 [12] Mamdani E H, Assilian S. An experiment in linguistic synthesis with a fuzzy logic controller[J]. International journal of man-machine studies, 1975, 7(1): 1-13. doi: 10.1016/S0020-7373(75)80002-2 [13] 王永富, 马冰心, 柴天 佑, 等. PEMFC 空气供给系统的二型自适应模糊建模与过氧比控 制[J]. 自动化学报, 2019, 45(5): 853-865.Wang Yong-Fu, Ma Bing-Xin, Chai Tian-You, Zhang XiaoYu. Type-2 Adaptive Fuzzy Modeling and Oxygen Excess Ratio Control for PEMFC Air Supply System[J]. Acta Automatica Sinica, 2019, 45(5): 853-865 [14] Tanaka K. An Introduction to Fuzzy Logic for Practical Applications. New York: Springer, 1997. [15] Lee C C. Fuzzy logic in control systems: fuzzy logic controller. II[J]. IEEE Transactions on systems, man, and cybernetics, 1990, 20(2): 419-435. doi: 10.1109/21.52552 [16] Rai N, Rai B. Control of fuzzy logic based PV-battery hybrid system for stand-alone DC applications. Journal of Electrical Systems and Information Technology, 2018, 5(2): 135-143 [17] Mamdani E H. Application of fuzzy logic to approximate reasoning using linguistic synthesis. IEEE Transactions on Computers, 1997, 26(12): 1182−1191 [18] Berenji H R, Khedkar P. Learning and tuning fuzzy logic controllers through reinforcements[J]. IEEE Transactions on neural networks, 1992, 3(5): 724-740. doi: 10.1109/72.159061 [19] Li X J, Yang G H. Fault detection in finite frequency domain for Takagi-Sugeno fuzzy systems with sensor faults[J]. IEEE Transactions on Cybernetics, 2013, 44(8): 1446-1458. [20] Zhao T, Huang M, Dian S. Stability and stabilization of TS fuzzy systems with two additive time-varying delays[J]. Information Sciences, 2019, 494: 174-192. doi: 10.1016/j.ins.2019.04.057 [21] Xie X, Yue D, Peng C. Relaxed Real-Time Scheduling Stabilization of Discrete-Time Takagi–Sugeno Fuzzy Systems via An Alterable-Weights-Based Ranking Switching Mechanism[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(6): 3808-3819. doi: 10.1109/TFUZZ.2018.2849701 [22] Chang X H, Liu Q, Wang Y M, Xiong J. Fuzzy peak-to-peak filtering for networked nonlinear systems with multipath data packet dropouts[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(3): 436-446. doi: 10.1109/TFUZZ.2018.2859903 [23] Liu Y J, Gong M, Tong S, Chen C P, Li D J. Adaptive fuzzy output feedback control for a class of nonlinear systems with full state constraints[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2607-2617 doi: 10.1109/TFUZZ.2018.2798577 [24] Mendel J M, John R I B. Type-2 fuzzy sets made simple[J]. IEEE Transactions on fuzzy systems, 2002, 10(2): 117-127. doi: 10.1109/91.995115 [25] Liu F. An efficient centroid type-reduction strategy for general type-2 fuzzy logic system[J]. Information Sciences, 2008, 178(9): 2224-2236. doi: 10.1016/j.ins.2007.11.014 [26] Zhai D, Mendel J M. Computing the centroid of a general type-2 fuzzy set by means of the centroid-flow algorithm[J]. IEEE Transactions on Fuzzy Systems, 2011, 19(3): 401-422. doi: 10.1109/TFUZZ.2010.2103076 [27] Wagner C, Hagras H. Toward general type-2 fuzzy logic systems based on zSlices[J]. IEEE Transactions on Fuzzy Systems, 2010, 18(4): 637-660.10 doi: 10.1109/TFUZZ.2010.2045386 [28] Zhao T, Liu J, Dian S. Finite-time control for interval type-2 fuzzy time-delay systems with norm-bounded uncertainties and limited communication capacity[J]. Information Sciences, 2019, 483: 153-173. doi: 10.1016/j.ins.2019.01.044 [29] Zhao T, Dian S. State feedback control for interval type-2 fuzzy systems with time-varying delay and unreliable communication links[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(2): 951-966. doi: 10.1109/TFUZZ.2017.2699947 [30] Mendel J M, Liu F, Zhai D. α-Plane Representation for Type-2 Fuzzy Sets: Theory and Applications[J]. IEEE Transactions on Fuzzy Systems, 2009, 17(5): 1189-1207. doi: 10.1109/TFUZZ.2009.2024411 [31] Caraveo C, Valdez F, Castillo O. A new meta-heuristics of optimization with dynamic adaptation of parameters using type-2 fuzzy logic for trajectory control of a mobile robot[J]. Algorithms, 2017, 10(3): 85. doi: 10.3390/a10030085 [32] Lu X G, Liu M, Liu J X. Design and optimization of interval type-2 fuzzy logic controller for delta parallel robot trajectory control[J]. International Journal of Fuzzy Systems, 2017, 19(1): 190-206. doi: 10.1007/s40815-015-0131-3 [33] Castillo O, Melin P. Optimization of type-2 fuzzy systems based on bio-inspired methods: A concise review[J]. Information Sciences, 2012, 205: 1-19. doi: 10.1016/j.ins.2012.04.003 [34] Zhao T, Wu Q, Li S C, Guo R, Dian S, Jia H R. Optimization design of general Type-2 fuzzy logic controllers for an uncertain Power-line inspection robot. Journal of Intelligent & Fuzzy Systems, 2019, DOI: 10.3233/JIFS-182515. [35] Castillo O, Amador-Angulo L. A generalized type-2 fuzzy logic approach for dynamic parameter adaptation in bee colony optimization applied to fuzzy controller design[J]. Information Sciences, 2018, 460: 476-496. [36] Eberhart R, Kennedy J. A new optimizer using particle swarm theory. In: Proceedings of the 6th International Symposium on Micro Machine and Human Science, Nagoya, Japan: IEEE, 1995. 39−43 [37] Eberhart R C, Shi Y H. Particle swarm optimization: developments, applications and resources. In: Proceedings of the 2001 Congress on Evolutionary Computation, Seoul, South Korea: IEEE, 2001. 81−86 [38] Coello C A C, Pulido G T, Lechuga M S. Handling multiple objectives with particle swarm optimization[J]. IEEE Transactions on Evolutionary Computation, 2004, 8(3):256-279. doi: 10.1109/TEVC.2004.826067 [39] Shi Y H, Eberhart R C. Empirical study of particle swarm optimization. In: Proceedings of the 1999 Congress on Evolutionary Computation, Washington, DC, USA: IEEE, 1999. 3: 1945−1950 [40] Xin J B, Chen G M, Hai Y B. A particle swarm optimizer with multi-stage linearly-decreasing inertia weight. In: Proceedings of the 2009 International Joint Conference on Computational Sciences and Optimization, Sanya, China: IEEE, 2009. 505−508 [41] Shi Y H, Eberhart R C. Fuzzy adaptive particle swarm optimization. In: Proceedings of the 2001 Congress on Evolutionary Computation, Seoul, South Korea: IEEE, 2001. 101−106 [42] Craig J J. Introduction to Robotics: Mechanics and Control. Boston, MA, USA: Addison-Wesley, 1989. [43] Mendel J M. Uncertain Rule-based Fuzzy Systems ——Introduction and New Directions (2nd Edition). Springer International Publishing, 2017. 684 [44] Wang L, Zheng S F, Wang X P, Fan L P. Fuzzy control of a double inverted pendulum based on information fusion. In: Proceedings of the 2010 International Conference on Intelligent Control and Information Processing, Dalian, China: IEEE, 2010. 327−331 -

 下载:
下载:




























计量
- 文章访问数: 926
- HTML全文浏览量: 436
- PDF下载量: 201
- 被引次数: 0
