

Cascaded Linear Active Disturbance Rejection Control for Uncertain Systems With Input Constraint and Output Noise
-
摘要: 针对一类具有输入约束和输出噪声的SISO (Single input single output)不确定非线性系统, 提出了一种基于误差补偿和工程滤波的抗饱和级联线性自抗扰控制(Linear active disturbance rejection control, LADRC)方法. 首先针对高频量测噪声, 分析了线性扩张状态观测器(Linear extended state observer, LESO)对噪声的放大机理及其与观测器增益的定量关系, 进而设计了一种基于工程滤波器的级联LADRC方法, 在滤除噪声的同时有效补偿了因滤波所造成的输出幅值和相位损失, 确保了闭环系统的跟踪精度. 然后继续考虑输入饱和的问题, 利用LADRC的实时估计/补偿能力, 通过将饱和差值信号引入LESO, 设计了一种基于误差补偿的抗饱和LADRC方法, 有效减小了系统设计控制量, 避免了系统长时间陷入饱和. 通过实时仿真比较, 验证了所提出方法的有效性.Abstract: For a class of SISO (single input single output) uncertain nonlinear systems with input constraint and output noise, an anti-saturation cascaded linear active disturbance rejection control (LADRC) method based on error compensation and engineering filtering is proposed. Firstly, aiming at high frequency measurement noise, the amplification mechanism of linear extended state observer (LESO) and its quantitative relationship with LESO gain are analyzed. On this basis, a cascaded LADRC scheme using engineering filter is designed to remove the noise while compensating for the amplitude and phase losses of system output caused by filtering, which ensures the tracking accuracy of closed-loop system. Then continuing to consider input saturation, using the real-time estimation/compensation capability of LADRC, the saturation difference signal is introduced into LESO, thus an anti-saturation LADRC scheme based on error compensation is designed, which effectively reduces the designed control variable and avoids the system falling into saturation for a long time. By real-time simulation comparison, the effectiveness of the proposed method is verified.
-
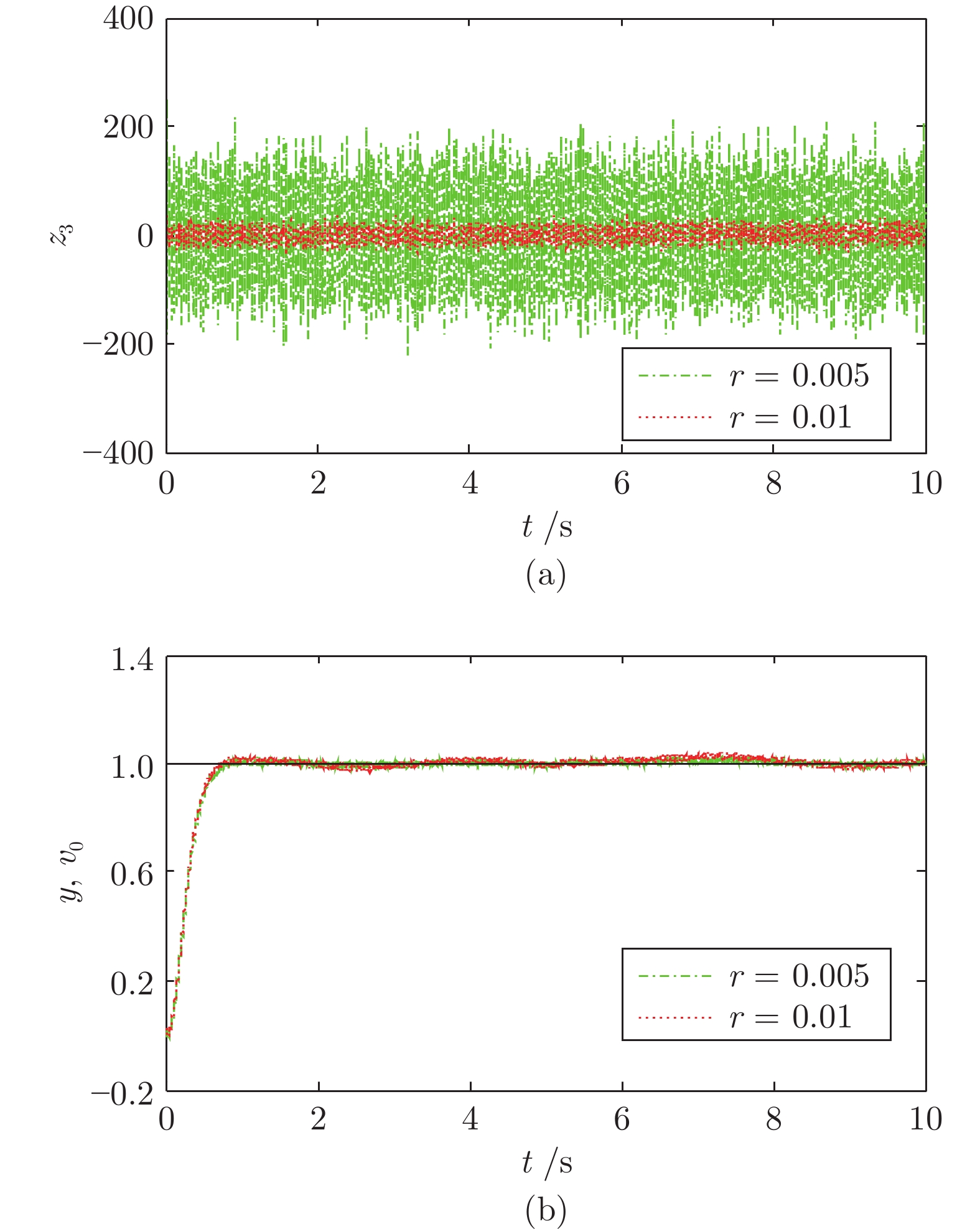
图 3 不同r值对系统控制性能的影响
Fig. 3 Effect on system control performance with different values of r

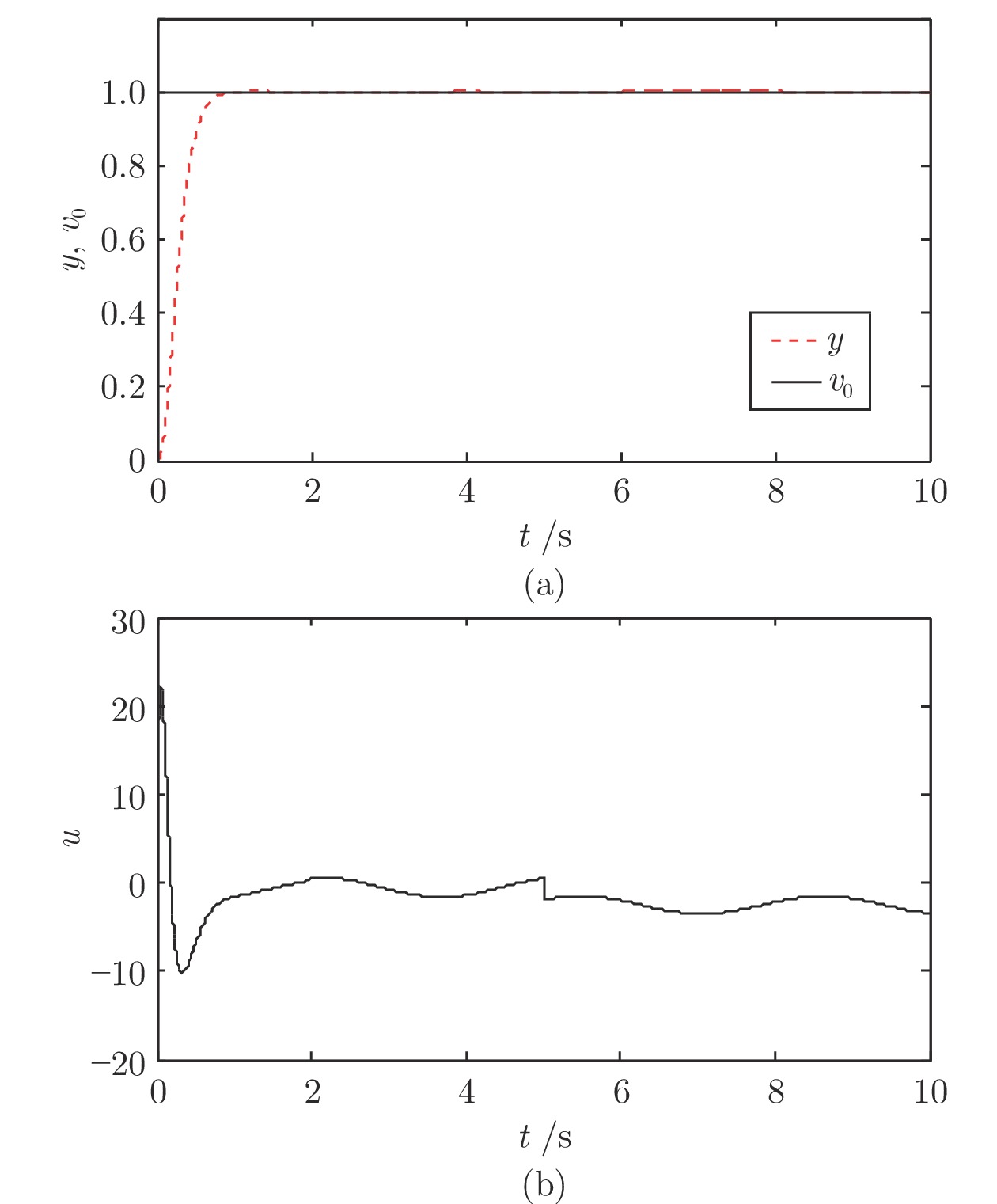
图 7 输入饱和约束下的CLADRC闭环系统响应
Fig. 7 Closed-loop system responses with input saturation based on CLADRC
-
[1] Gao Z Q. On the centrality of disturbance rejection in automatic control. ISA Transactions, 2014, 53(4): 850-857 doi: 10.1016/j.isatra.2013.09.012 [2] 郭宝珠. 非线性系统的自抗扰控制引论. 数学建模及其应用, 2017, 6(1): 13-22 doi: 10.3969/j.issn.2095-3070.2017.01.003Guo Bao-Zhu. An introduction to active disturbance rejection control for nonlinear systems. Mathematical Modeling and Its Applications, 2017, 6(1): 13-22 doi: 10.3969/j.issn.2095-3070.2017.01.003 [3] Han J Q. From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906 doi: 10.1109/TIE.2008.2011621 [4] 韩京清. 自抗扰控制器及其应用. 控制与决策, 1998, 13(1): 19-23 doi: 10.3321/j.issn:1001-0920.1998.01.005Han Jing-Qing. Active disturbance rejection controller and applications. Control and Decision, 1998, 13(1): 19-23 doi: 10.3321/j.issn:1001-0920.1998.01.005 [5] Guo B Z, Zhao Z L. On convergence of nonlinear active disturbance rejection for SISO systems. In: Proceedings of the 24th Chinese Control and Decision Conference. Taiyuan, China: IEEE, 2012. 3507−3512 [6] Qi X H, Li J, Xia Y Q, Gao Z Q. On the robust stability of active disturbance rejection control for SISO systems. Circuits, Systems, and Signal Processing, 2017, 36(1): 65-81 doi: 10.1007/s00034-016-0302-y [7] Xue W C, Huang Y. Performance analysis of 2-DOF tracking control for a class of nonlinear uncertain systems with discontinuous disturbances. International Journal of Robust Nonlinear Control, 2018, 28(4): 1456-1473 doi: 10.1002/rnc.3972 [8] Li Z Y, Li X M, Zhou Z Y. Active disturbance rejection controller for loitering unit with parameter uncertainty. In: Proceedings of the 16th International Conference on Control, Automation and Systems. Gyeongju, Korea (South): IEEE, 2016. 140−144 [9] Long Y, Du Z J, Cong L, Wang W D, Zhang Z M, Dong W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton. ISA Transactions, 2017, 67: 389-397 doi: 10.1016/j.isatra.2017.01.006 [10] 陈增强, 孙明玮, 杨瑞光. 线性自抗扰控制器的稳定性研究. 自动化学报, 2013, 39(5): 574-580Chen Zeng-Qiang, Sun Ming-Wei, Yang Rui-Guang. On the stability of linear active disturbance rejection control. Acta Automatica Sinica, 2013, 39(5): 574-580 [11] Xue W C, Huang Y. Performance analysis of active disturbance rejection tracking control for a class of uncertain LTI systems. ISA Transactions, 2015, 58: 133-154 doi: 10.1016/j.isatra.2015.05.001 [12] Xue W C, Huang Y. On performance analysis of ADRC for a class of MIMO lower-triangular nonlinear uncertain systems. ISA Transactions, 2014, 53(4): 955-962 doi: 10.1016/j.isatra.2014.02.002 [13] 高阳, 吴文海, 高丽. 高阶不确定非线性系统的线性自抗扰控制. 控制与决策, 2020, 35(2): 483−491Gao Yang, Wu Wen-Hai, Gao Li. Linear active disturbance rejection control for high-order nonlinear systems with uncertainty. Control and Decision, 2020, 35(2): 483−491 [14] Li Y M, Tong S C, Li T S. Direct adaptive fuzzy backstepping control of uncertain nonlinear systems in the presence of input saturation. Neural Computing & Applications, 2013, 23(5): 1207-1216 [15] Molavi A, Jalali A, Naraghi M G. Adaptive fuzzy control of a class of nonaffine nonlinear system with input saturation based on passivity theorem. ISA Transactions, 2017, 69: 202-213 doi: 10.1016/j.isatra.2017.03.020 [16] Xu B, Huang X Y, Wang D W, Sun F C. Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation. Asian Journal of Control, 2014, 16(1): 162-174 doi: 10.1002/asjc.679 [17] 彭秀艳, 贾书丽, 张彪. 一类具有执行器饱和的非线性系统抗饱和方法研究. 自动化学报, 2016, 42(5): 798-804Peng Xiu-Yan, Jia Shu-Li, Zhang Biao. An anti-saturation method for a class of nonlinear systems with actuator saturation. Acta Automatica Sinica, 2016, 42(5): 798-804 [18] 林安辉, 蒋德松, 曾建平. 具有输入饱和的欠驱动船舶编队控制. 自动化学报, 2018, 44(8): 1496-1504Lin An-Hui, Jiang De-Song, Zeng Jian-Ping. Underactuated Ship Formation Control With Input Saturation. Acta Automatica Sinica, 2018, 44(8): 1496-1504 [19] Prasov A A, Khalil H K. A nonlinear high-gain observer for systems with measurement noise in a feedback control framework. IEEE Transactions on Automatic Control, 2013, 58(3): 569-580 doi: 10.1109/TAC.2012.2218063 [20] Lee J, Choi J, Khalil H K. New implementation of high-gain observers in the presence of measurement noise using stochastic approximation. In: Proceedings of the 2016 European Control Conference. Aalborg, Denmark: IEEE, 2016. 1740−1745 [21] Teel A R. Further variants of the Astolfi/Marconi high-gain observer. In: Proceedings of the 2016 American Control Conference. Boston, USA: IEEE, 2016. 993−998 [22] Battilotti S. Robust observer design under measurement noise with gain adaptation and saturated estimates. Automatica, 2017, 81: 75-86 doi: 10.1016/j.automatica.2017.02.008 [23] Nair R R, Behera L. Robust adaptive gain higher order sliding mode observer based control-constrained nonlinear model predictive control for spacecraft formation flying. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 367-381 doi: 10.1109/JAS.2016.7510253 -

 下载:
下载:




图(8)
计量
- 文章访问数: 1125
- HTML全文浏览量: 655
- PDF下载量: 287
- 被引次数: 0
