

The External Calibration Algorithm for Plane Laser-Scanning Machanism Based on Vertical Constraint
-
摘要:
为了解决人造特征点标定法中特征匹配不精确等缺陷, 本文针对二轴传动的高精度平面激光扫描机构提出了利用线特征的垂直约束进行外参标定的新算法. 不仅如此, 在该算法中为了简化建立标定方程的流程, 避免计算与标定目标无关的冗余中间量, 提出了一种快速确定标定方程参数的方法. 首先将扫描结果按待标定参数标准值转换至同一坐标系形成点云, 再提取其中的线特征; 接着根据线特征的垂直约束建立外参方程, 并根据线特征的测量值和实际值间的转换计算方程参数; 最终, 将多次测量得到的方程组求解转化为最优化问题, 并得到外参的数值解. 在对比实验中, 本算法比基于特征点的标定方法表现更好.
Abstract:In order to solve the defect of inaccurate feature matching in the artificial feature point calibration method, a new algorithm for the external parameter calibration using the vertical constraint of line feature for the plane laser-scanning machanism of high precision two-axis transmission is proposed in this article. Moreover, in this algorithm, in order to simplify the process of establishing the calibration equation and avoid calculating the redundant intermediate quantity unrelated to the calibration target, a method for quickly determining the parameters of the calibration equation is proposed. Firstly, the scan result is converted to the same coordinate system according to the standard value of the parameter to be calibrated to form a point cloud, and then the line features are extracted; then the external parameter equation is established according to the vertical constraint of the line feature, and the parameters of the equation is calculated according to the conversion between the measured value and the actual value of the line feature; finally, the equations obtained from the multiple measurements are transformed into optimization problems, and the numerical solution of the external parameters is obtained. In the contrast experiment, the algorithm performs better than the feature point based calibration method.
-
Key words:
- Laser scan /
- point cloud /
- external calibration /
- optimization
-
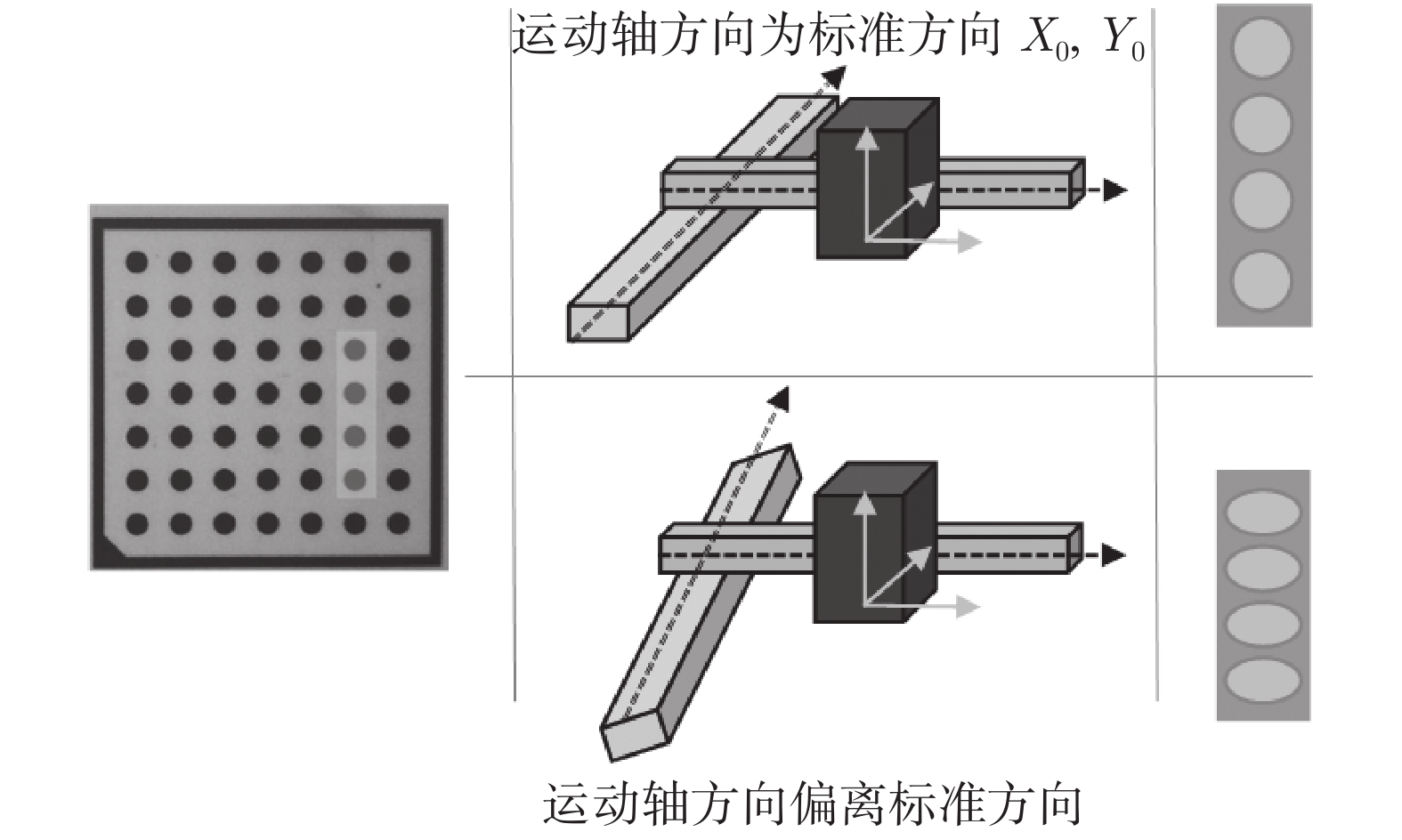
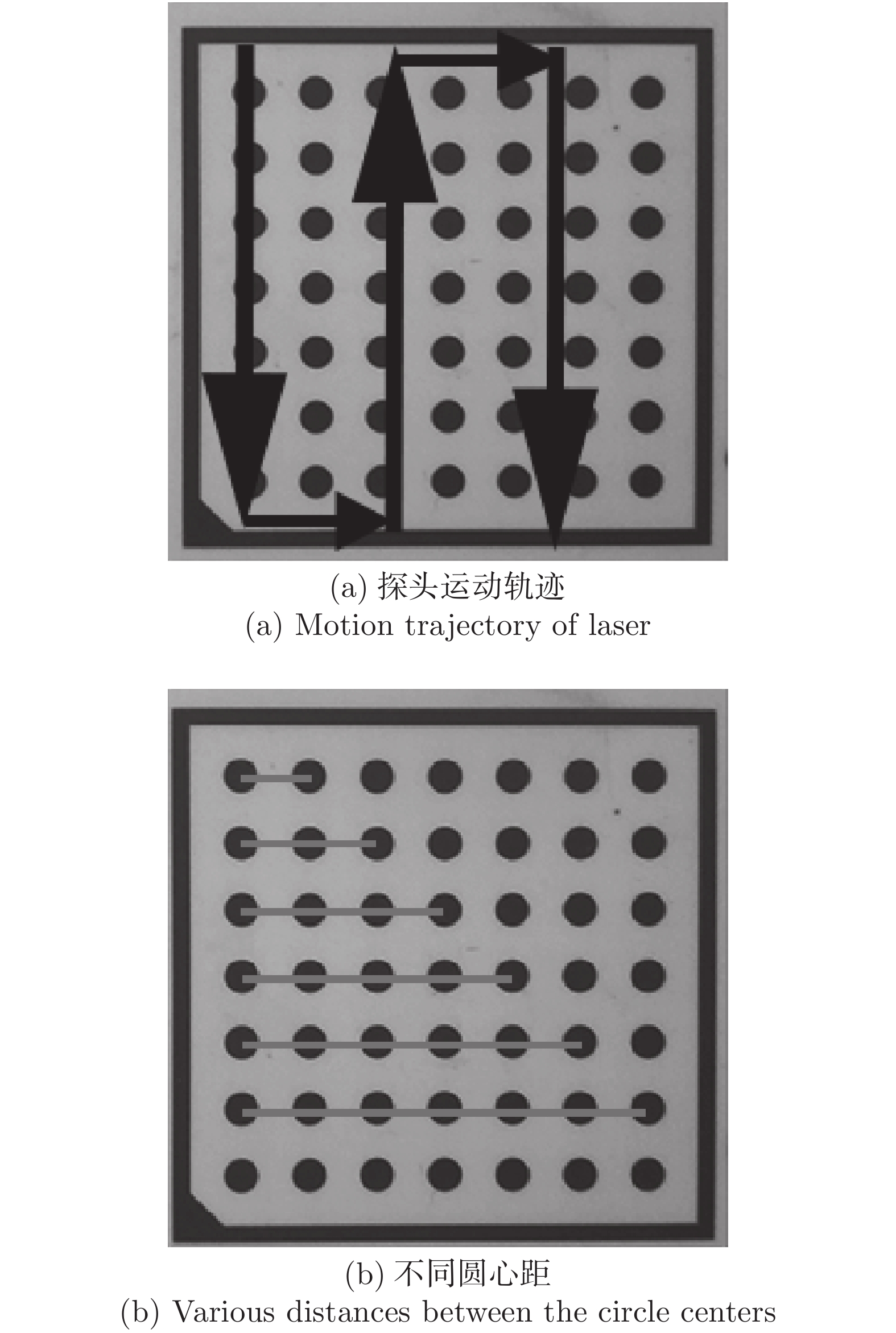
图 3 圆斑标定板与扫描结果的形状畸变
Fig. 3 Spot calibration board and shape distortion of scanning result

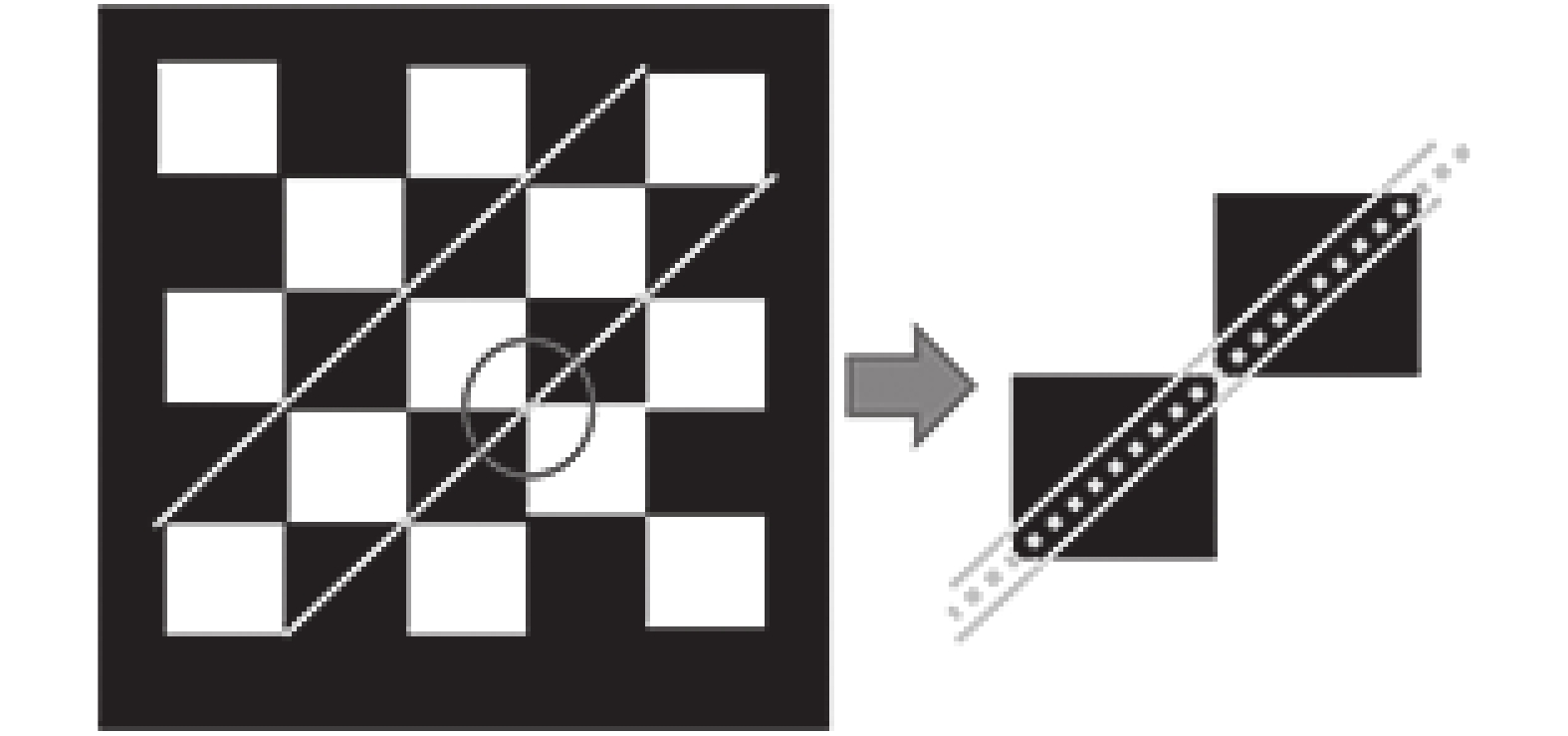
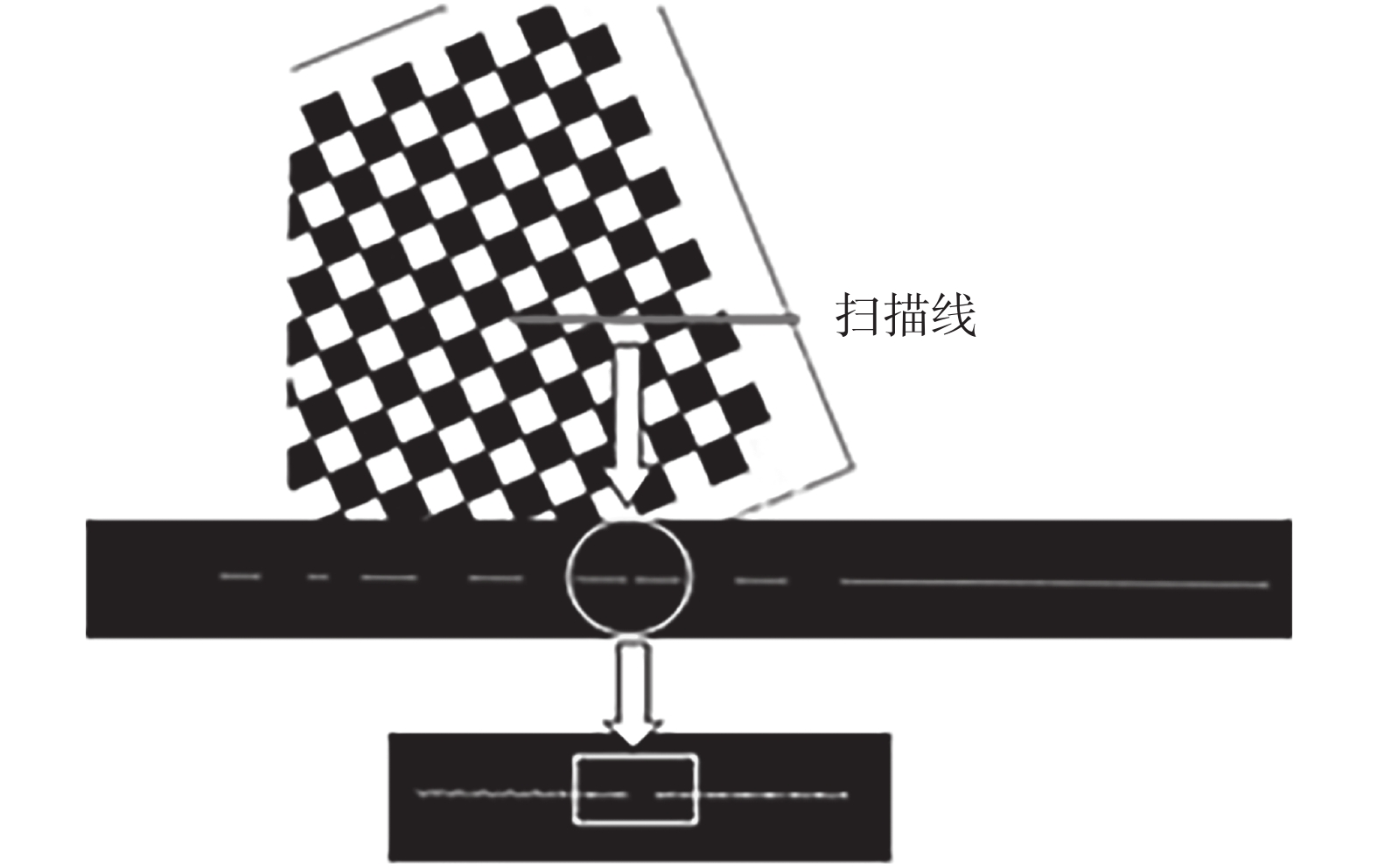
图 5 标定板扫描与线特征提取过程
Fig. 5 Scanning of calibration board and procedure of line feature extraction
表 1 测量结果
Table 1 Measurement results
直线 1 的方向向量 直线 2 的方向向量 $[0.99659, 0.03356,0.07539]$ $[-0.04385,0.99904,0.00192]$ $[-0.69945,0.71395,-0.03244]$ $[0.71329,-0.03317,0.70008]$ $[0.80461,0.58967,0.06998]$ $[-0.58046,0.81253,-0.05343]$ $[-0.61523,0.78755,-0.03541]$ $[0.78759,0.61540,-0.03129]$ $[0.79372,0.59944,0.10337]$ $[-0.59260,0.80175,-0.07760]$ $[0.87606,-0.47478,0.08426]$ $[0.46701,0.88316,0.04391]$ $[0.82421,-0.56561,0.02783]$ $[0.56293,0.82555,-0.03971]$  下载: 导出CSV
下载: 导出CSV
表 2 算法比较
Table 2 Comparision between algorithms
比较指标 基于角点 基于圆心 本文算法 指标 1) 否 (需单应性矩阵) 否 (需坐标变换) 是 指标 2) 否 是 否 指标 3) 无 (算法难以实践) 0.94 % 0.15 %
下载: 导出CSV
-
[1] Zhang Q, Pless R. Extrinsic calibration of a camera and laser range finder (improves camera calibration). In: Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan: IEEE, 2004. 8: 2301−2306 [2] Geiger A, Moosmann F, Mer C, Schuster B. Automatic camera and range sensor calibration using a single shot. In: Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA: IEEE, 2012. 3936−3943 [3] Zou C, He B W, Zhang L W, Zhang J W, Deng Z. An automatic calibration between an omni-directional camera and a laser rangefinder for dynamic scenes reconstruction. In: Proceeding of the 2016 IEEE International Conference on Robotics and Biomimetics, ROBIO 2016, Qingdao, China: IEEE, 2016. 1528−1534 [4] 胡钊政, 赵斌, 李娜, 夏克文. 基于虚拟三面体的摄像机与二维激光测距仪外参数最小解标定新算法. 自动化学报, 2015, 41(11): 1951−1960Hu Zhao-Zheng, Zhao Bin, Li Na, Xia Ke-Wen. Minimal solution to extrinsic calibration of camera and 2D laser rangefinder based on virtual trihedron. Acta Automatica Sinica, 2015, 41(11): 1951−1960 [5] Atanacio-Jiménez G, González-Barbosa J J, Hurtado-Ramos J B, Ornelas-Rodríguez F J, Jiménez-Hernández H, García-Ramirez, T. LiDAR velodyne HDL-64E calibration using pattern planes. International Journal of Advanced Robotic Systems, 2011, 8(5): 70−82 doi: 10.5772/45709 [6] Chen Z, Yang X P, Zhang C X, Jiang S F. Extrinsic calibration of a laser range finder and a camera based on the automatic detection of line feature. In: Proceedings of the 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics, CISP-BMEI 2016, Datong, China: IEEE, 2016. 448–453 [7] Zhou L P, Deng Z D. A new algorithm for the extrinsic calibration of a 2D LIDAR and a camera. Measurement Science and Technology, 2014, 25(6): 065107 [8] Gomez-Ojeda R, Briales J, Fernandez-Moral E, GonzalezJimenez J. Extrinsic calibration of a 2D laser-rangefinder and a camera based on scene corners. In: Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA: IEEE, 2015. 3611−3616 [9] Liao Q H, Liu M, Tai L, Ye H Y. Extrinsic calibration of 3D range finder and camera without auxiliary object or human intervention [Online], available: https://arxiv.org/pdf/1703.04391.pdf, September 27, 2019 [10] Gong Z, Wen C L, Wang C, Li J. A target-free automatic self-calibration approach for multibeam laser scanners. IEEE Transactions on Instrumentation and Measurement, 2018, 67(1): 238−240 doi: 10.1109/TIM.2017.2757148 [11] 钱丽丹, 杨军伟. 基于精密运动的激光平面标定方法. 计算机工程, 2013, 39(4): 318−321 doi: 10.3969/j.issn.1000-3428.2013.04.073Qian Li-dan, Yang Jun-wei. Laser plane calibration method based on precise movement. Computer Engineering, 2013, 39(4): 318−321 doi: 10.3969/j.issn.1000-3428.2013.04.073 [12] Zhang Z. A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330−1334 doi: 10.1109/34.888718 [13] 程金龙, 冯莹, 曹毓, 雷兵, 魏立安. 车载激光雷达外参数的标定方法. 光电工程, 2013, 40(12): 89−94 doi: 10.3969/j.issn.1003-501X.2013.12.015Cheng Jin-Long, Feng Ying, Cao Yu, Lei Bing, Wei Li-An. Extrinsic calibration method for multiple lidars mounted on mobile vehicle. Opto-Electronic Engineering, 2013, 40(12): 89−94 doi: 10.3969/j.issn.1003-501X.2013.12.015 [14] Raguram R, Chum O, Pollefeys M, Matas J, Frahm J M. USAC: A universal framework for random sample consensus. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(8): 2022−2038 doi: 10.1109/TPAMI.2012.257 [15] Feng D H, Zhang X, Zhang X, Chu W Q. RANSAC-based spatial circle fitting algorithm and its application on motion range detection of a manipulator. Optical Technique, 2016, 42(2): 156−160 [16] 俞毓锋, 赵卉菁. 基于相机与摇摆激光雷达融合的非结构化环境定位. 自动化学报, 2019, 45(9): 1791−1798Yu Yu-Feng, Zhao Hui-Jing. Off-road localization using monocular camera and nodding LiDAR. Acta Automatica Sinica, 2019, 45(9): 1791−1798 [17] Boyd S, Vandenberghe L [著], 王书宁, 许鋆, 黄晓霖 [译]. 凸优化. 北京: 清华大学出版社, 2013.Boyd S, Vandenberghe L [Author], Wang Shu-Ning, Xu Yun, Huang Xiao-Lin [Translator]. Convex Optimization. Beijing: Tsinghua University Press, 2013. [18] 谢理想, 万刚, 曹雪峰, 王庆贺, 王龙. 基于凸优化改进的相机全局位置估计方法. 自动化学报, 2018, 44(3): 506−516Xie Li-Xiang, Wan Gang, Cao Xue-Feng, Wang Qing-He, Wang Long. An improved method for camera location estimation through convex optimization. Acta Automatica Sinica, 2018, 44(3): 506−516 [19] 吴燕雄, 李峰, 刘芳, 程丽娜, 郭丽丽. 平滑度欧氏聚类算法分割点云数据. 测控技术, 2016, 44(3): 506−516Wu Yan-Xiong, Li Feng, Liu Fang, Cheng Li-Na, Guo Li-Li. Point cloud segmentation using euclidean cluster extraction algorithm with the smoothness. Measurement and Control Technology, 2016, 44(3): 506−516 [20] Rusu R B, Cousins S. 3D is here: Point cloud library (PCL). In: Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China: IEEE, 2011. 1−4. [21] Li S H, Wang J X, Liang Z Q, Su L. Tree point clouds registration using an improved ICP algorithm based on kd-tree. In: Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China: IEEE, 2016. 4545−4548 -

 下载:
下载:


计量
- 文章访问数: 1158
- HTML全文浏览量: 628
- PDF下载量: 141
- 被引次数: 0
