

Event-Triggered Control for Multi-Agent Systems With Prescribed Performance and Full State Constraints
-
摘要: 针对一类非严格反馈的非线性多智能体系统一致性跟踪问题,在考虑全状态约束和指定性能的基础上提出了一种事件触发自适应控制算法.首先,通过设计性能函数,使跟踪误差在规定时间内收敛于指定范围.然后,在反步法中引入Barrier Lyapunov函数使所有状态满足约束条件,结合动态面技术解决传统反步法产生的"计算爆炸"问题,并利用径向基函数神经网络(Radial basis function neural networks,RBF NNs)处理系统中的未知非线性函数.最后基于Lyapunov稳定性理论证明系统中所有信号都是半全局一致最终有界的,跟踪误差收敛于原点的有界邻域内且满足指定性能.仿真结果验证了该控制算法的有效性.Abstract: In this paper, an event-triggered adaptive control algorithm is proposed to address the consensus tracking problem of non-strict feedback nonlinear multi-agent systems with prescribed performance and full state constraints. With the aid of performance function, tracking error converges to a specified range within a specified time. By introducing the Barrier Lyapunov function into the backstepping approach, the full states of the systems satisfy the constraints. And the dynamic surface technique is employed to dispose the problem of "explosion of complexity". Moreover, the radial basis function neural networks (RBF NNs) are utilized to approximate unknown nonlinear functions in the systems. According to the Lyapunov stability theory, all signals are semi-globally uniformly ultimately bounded, and the tracking error converges to a bounded neighborhood of the origin with prescribed performance. Finally, the effectiveness of the proposed control algorithm is verified by simulation results.1) 本文责任编委 孙秋野
-

图 3 具有指定性能的跟踪误差$\tilde{s}_{i, 1}$
Fig. 3 Tracking errors with prescribed performance $\tilde{s}_{i, 1}$
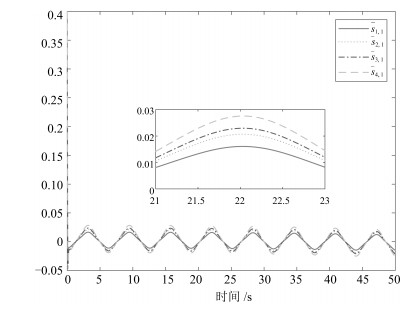
图 4 不具有指定性能的跟踪误差$\tilde{s}_{i, 1}$
Fig. 4 Tracking errors without prescribed performance $\tilde{s}_{i, 1}$
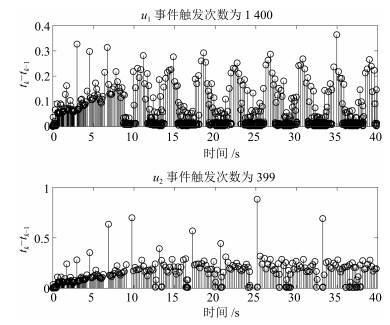
图 6 $u_{1}$, $u_{2}$的事件触发时间间隔
Fig. 6 Time interval of event-triggered for $u_{1}$, $u_{2}$
-
[1] Wang F, Chen B, Lin C, Li X H. Distributed adaptive neural control for stochastic nonlinear multiagent systems. IEEE Transactions on Cybernetics, 2017, 47(7):1795-1803 doi: 10.1109/TCYB.2016.2623898 [2] Wang F, Liu Z, Zhang Y, Chen B. Distributed adaptive coordination control for uncertain nonlinear multi-agent systems with dead-zone input. Journal of the Franklin Institute, 2016, 353(10):2270-2289. doi: 10.1016/j.jfranklin.2016.04.002 [3] Zhang Y H, Liang H J, Ma H, Zhou Q, Yu Z D. Distributed adaptive consensus tracking control for nonlinear multi-agent systems with state constraints. Applied Mathematics and Computation, 2018, 326:16-32 doi: 10.1016/j.amc.2017.12.038 [4] Zhang H W, Lewis F L. Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics. Automatica, 2012, 48(7):1432-1439 doi: 10.1016/j.automatica.2012.05.008 [5] 赵俊, 刘国平.非完整性约束的平面多智能体位置时变一致性控制.自动化学报, 2017, 43(7):1169-1177 http://www.aas.net.cn/CN/abstract/abstract19090.shtmlZhao Jun, Liu Guo-Ping. Position time-varying consensus control for multiple planar agents with non-holonomic constraint. Acta Automatica Sinica, 2017, 43(7):1169-1177 http://www.aas.net.cn/CN/abstract/abstract19090.shtml [6] Wang A J, Liao X F, He H B. Event-triggered differentially private average consensus for multi-agent network. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1):75-83 http://d.old.wanfangdata.com.cn/Periodical/zdhxb-ywb201901006 [7] Su H S, Wang X F, Lin Z L. Flocking of multi-agents with a virtual leader. IEEE Transactions on Automatic Control, 2009, 54(2):293-307 doi: 10.1109/TAC.2008.2010897 [8] Li T S, Zhao R, Chen C L P, Fang L Y, Liu C. Finite-time formation control of under-actuated ships using nonlinear sliding mode control. IEEE Transactions on Cybernetics, 2018, 48(11):3243-3253 doi: 10.1109/TCYB.2018.2794968 [9] Cheng Y, Ugrinovskii V. Event-triggered leader-following tracking control for multivariable multi-agent systems. Automatica, 2016, 70:204-210 doi: 10.1016/j.automatica.2016.04.003 [10] Ding D R, Wang Z D, Shen B, Wei G L. Event-triggered consensus control for discrete-time stochastic multi-agent systems:the input-to-state stability in probability. Automatica, 2015, 62:284-291 doi: 10.1016/j.automatica.2015.09.037 [11] 杨若涵, 张皓, 严怀成.基于事件触发的拓扑切换异构多智能体协同输出调节.自动化学报, 2017, 43(3):472-477 http://www.aas.net.cn/CN/abstract/abstract19025.shtmlYang Ruo-Han, Zhang Hao, Yan Huai-Cheng. Event-triggered cooperative output regulation of heterogeneous multi-agent systems with switching topology. Acta Automatica Sinica, 2017, 43(3):472-477 http://www.aas.net.cn/CN/abstract/abstract19025.shtml [12] Yu M, Yan C, Xie D M, Xie G M. Event-triggered tracking consensus with packet losses and time-varying delays. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2):165-173 doi: 10.1109/JAS.2016.7451104 [13] Borgers D P, Heemels W P M H. Event-separation properties of event-triggered control systems. IEEE Transactions on Automatic Control, 2014, 59(10):2644-2656 doi: 10.1109/TAC.2014.2325272 [14] Xing L T, Wen C Y, Liu Z T, Su H Y, Cai J P. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Transactions on Automatic Control, 2017, 62(4):2071-2076 doi: 10.1109/TAC.2016.2594204 [15] Liu Y J, Tong S C. Barrier Lyapunov functions for Nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica, 2017, 76:143-152 doi: 10.1016/j.automatica.2016.10.011 [16] Liu Y J, Lu S M, Tong S C, Chen X K, Chen C L P, Li D J. Adaptive control-based barrier Lyapunov functions for a class of stochastic nonlinear systems with full state constraints. Automatica, 2018, 87:83-93 doi: 10.1016/j.automatica.2017.07.028 [17] Bechlioulis C P, Rovithakis G A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica, 2014, 50(4):1217-1226 doi: 10.1016/j.automatica.2014.02.020 [18] Li Y M, Tong S C, Liu L, Feng G. Adaptive output-feedback control design with prescribed performance for switched nonlinear systems. Automatica, 2017, 80:225-231 doi: 10.1016/j.automatica.2017.02.005 [19] Zhou Q, Li H Y, Wang L J, Lu R Q. Prescribed performance observer-based adaptive fuzzy control for nonstrict-feedback stochastic nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, 48(10):1747-1758 doi: 10.1109/TSMC.2017.2738155 [20] Li Y M, Tong S C. Adaptive fuzzy control with prescribed performance for block-triangular-structured nonlinear systems. IEEE Transactions on Fuzzy Systems, 2018, 26(3):1153-1163 doi: 10.1109/TFUZZ.2017.2710950 [21] Li Y M, Tong S C. Adaptive neural networks prescribed performance control design for switched interconnected uncertain nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(7):3059-3068 http://www.ncbi.nlm.nih.gov/pubmed/28678722 [22] Zhang H W, Lewis F L, Qu Z H. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Transactions on Industrial Electronics, 2012, 59(7):3026-3041 doi: 10.1109/TIE.2011.2160140 [23] Yang C G, Ge S S, Xiang C, Chai T Y, Lee T H. Output feedback NN control for two classes of discrete-time systems with unknown control directions in a unified approach. IEEE Transactions on Neural Networks, 2008, 19(11):1873-1886 doi: 10.1109/TNN.2008.2003290 [24] Chen M, Shao S Y, Jiang B. Adaptive neural control of uncertain nonlinear systems using disturbance observer. IEEE Transactions on Cybernetics, 2017, 47(10):3110-3123 doi: 10.1109/TCYB.2017.2667680 [25] Bai W W, Zhou Q, Li T S, Li H Y. Adaptive reinforcement learning NN control for uncertain nonlinear system with input saturation, IEEE Transactions on Cybernetics, 2019. DOI: 10.1109/TCYB.2019.2921057 [26] Sun Y M, Chen B, Lin C, Wang H H, Zhou S W. Adaptive neural control for a class of stochastic nonlinear systems by backstepping approach. Information Sciences, 2016, 369:748-764 doi: 10.1016/j.ins.2016.06.010 [27] Ren B B, Ge S S, Tee K P, Lee T H. Adaptive neural control for output feedback nonlinear systems using a Barrier Lyapunov function. IEEE Transactions on Neural Networks, 2010, 21(8):1339-1345 doi: 10.1109/TNN.2010.2047115 [28] Li T S, Wang D, Feng G, Tong S C. A DSC approach to robust adaptive NN tracking control for strict-feedback nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2010, 40(3):915-927 doi: 10.1109/TSMCB.2009.2033563 -

 下载:
下载:


图(7)
计量
- 文章访问数: 3097
- HTML全文浏览量: 1601
- PDF下载量: 443
- 被引次数: 0
