

Bounded Bipartite Synchronization for Coupled Discrete Systems Under Antagonistic Interactions and Time-varying Topologies
-
摘要: 针对含有对抗关系和时变拓扑的耦合离散系统, 本文研究了这类系统有界双向同步问题(Bounded bipartite synchronization, BBS). 考虑了以下两种情形: 1)在某时刻所有个体不能划分为两个敌对阵营; 2)尽管在每一个时刻所有个体都可以被划分为两个敌对阵营, 但每个阵营中的成员随着时间的推移而改变. 对于以上两种情形, 耦合系统不能达到双向同步, 可以在一定条件下达到有界双向同步. 本文得到了使耦合离散系统达到有界双向同步的一些充分条件, 并通过一个数值例子验证了所得结论的有效性.Abstract: For coupled discrete systems with antagonistic interactions and time-varying topologies, this paper studies the bounded bipartite synchronization (BBS) for such coupled systems. This paper considers the following two cases: 1) At some time instants all agents cannot be divided into two hostile camps; 2) Although all agents can be partitioned into two hostile camps, the members of hostile camps change as time goes on. For the above conditions, the coupled systems cannot achieve bipartite synchronization, and can achieve BBS under some conditions. This paper obtains some sufficient conditions such that the coupled discrete system achieves BBS, and one numerical example is provided to illustrate the effectiveness of obtained results.
-
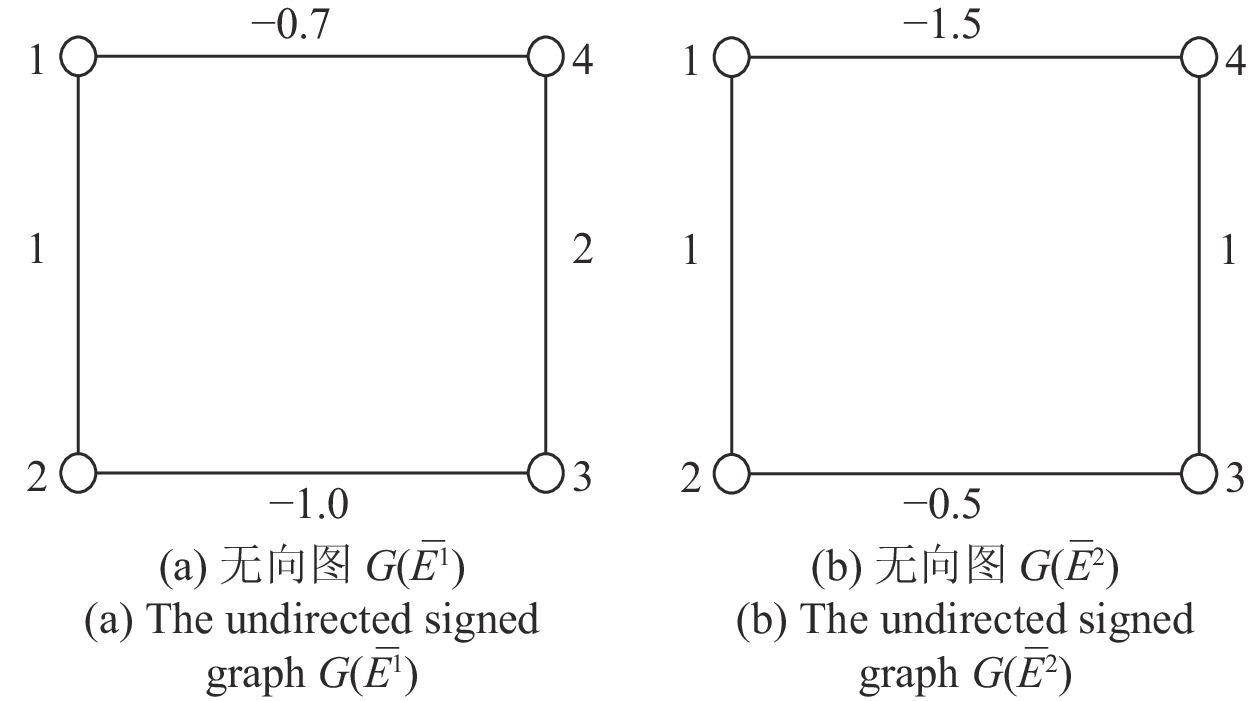
图 2 无向图
$G( {\bar {E}^i} )$ ,$i = 1,2$ Fig. 2 The undirected signed graph
$G( {\bar {E}^i} )$ ,$i = 1,2$ 
-
[1] Ren W, Beard R W. Distributed Consensus in Multi-Vehicle Cooperative Control. Berlin, Germany: Springer, 2008. [2] Mesbahi M, Egerstedt M. Graph Theoretic Methods in Multiagent Networks. USA: Princeton University Press, 2010. [3] 陈关荣. 复杂动态网络环境下控制理论遇到的问题与挑战. 自动化学报2013, 39(4): 312-321Chen Guan-Rong. Problems and challenges in control theory under complex dynamical network environments. Acta Automatica Sinica, 2013, 39(4): 312-321 [4] 徐君, 张国良, 曾静, 孙巧, 羊帆. 具有时延和切换拓扑的高阶离散时间多智能体系统鲁棒保性能一致性. 自动化学报, 2019, 45(2): 360-373Xu Jun, Zhang Guo-Liang, Zeng Jing, Sun Qiao, Yang Fan. Robust guaranteed cost consensus for high-order discretetime multi-agent systems with switching topologies and time delays. Acta Automatica Sinica, 2019, 45(2): 360-373 [5] Xu J, Zhang G, Zeng J, Du B, Jia X. Robust H∞ consensus control for high-order discrete-time multi-agent systems with parameter uncertainties and external disturbances. Acta Automatica Sinica, 2017, 43(10): 1850-1857 [6] Altaflni C. Dynamics of opinion forming in structurally balanced social networks. PLoS ONE 2012, 7(6): e38135 doi: 10.1371/journal.pone.0038135 [7] Lee S H. Predator’s attack-induced phase-like transition in prey flock. Physics Letters A, 2006, 357(4): 270-274 [8] Grossberg S. Competition, decision, and consensus. Journal of Mathematical Analysis and Applications, 1978, 66(2): 470-493 doi: 10.1016/0022-247X(78)90249-4 [9] Chen C C, Wan Y H, Chung M C, Sun Y C. An efiective recommendation method for cold start new users using trust and distrust networks. Information Sciences, 2013, 224: 19- 36 doi: 10.1016/j.ins.2012.10.037 [10] Altaflni C. Consensus problems on networks with antagonistic interactions. IEEE Transactions on Automatic Control, 2013, 58(4): 935-946 doi: 10.1109/TAC.2012.2224251 [11] Valcher M E, Misra P. On the consensus and bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. Systems & Control Letters, 2014, 66: 94-103 [12] Zhang H W, Chen J. Bipartite consensus of linear multiagent systems over signed digraphs: An output feedback control approach. In: Proceeding of the 19th World Congress, Cape Town, South Africa: IFAC, 2014, 4681−4686 [13] Hu J P, Zheng W X. Emergent collective behaviors on coopetition networks. Physics Letters A, 2014, 378(26): 1787-1796 [14] Fan M C, Zhang H T, Wang M. Bipartite flocking for multiagent systems. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(9): 3313-3322 doi: 10.1016/j.cnsns.2013.10.009 [15] Meng D, Du M, Jia Y. Interval bipartite consensus of networked agents associated with signed digraphs. IEEE Transactions on Automatic Control, 2016, 61(12): 3755-3770 doi: 10.1109/TAC.2016.2528539 [16] Guo X, Lu J, Alsaedi A, Alsaedi F E. Bipartite consensus for multi-agent systems with antagonistic interactions and communication delays. Physica A: Statistical Mechanics and its Applications, 2018, 495: 488-497 doi: 10.1016/j.physa.2017.12.078 [17] Zhai S D, Li Q D. Bipartite synchronization in a network of nonlinear systems: a contraction approach. Journal of the Franklin Institute, 2016, 353(17): 4602-4619 doi: 10.1016/j.jfranklin.2016.08.017 [18] Liu J, Chen X, Basar T, Belabbas M A. Exponential convergence of the discrete-and continuous-time Altaflni models. IEEE Transactions on Automatic Control, 2017, 62(12): 6168-6182 doi: 10.1109/TAC.2017.2700523 [19] Liang J Q, Meng D Y. Quasi-interval bipartite consensus problems on discrete-time signed networks. In: Proceedings of the 2018 Chinese Intelligent Systems Conference. Singapore, Singapore: Springer, 2019. 11−20 [20] Proskurnikov A V, Tempo R. A tutorial on modeling and analysis of dynamic social networks. Part I. Annual Reviews in Control, 2017, 43: 65-79 [21] Proskurnikov A V, Tempo R. A tutorial on modeling and analysis of dynamic social networks. Part II. Annual Reviews in Control, 2018, 45: 166-190 doi: 10.1016/j.arcontrol.2018.03.005 [22] Altaflni C, Lini G. Predictable dynamics of opinion forming for networks with antagonistic interactions. IEEE Transactions on Automatic Control, 2015, 60(2): 342-357 doi: 10.1109/TAC.2014.2343371 [23] Zhai S D. Modulus synchronization in a network of nonlinear systems with antagonistic interactions and switching topologies. Communications in Nonlinear Science and Numerical Simulation, 2016, 33: 184-193 doi: 10.1016/j.cnsns.2015.09.010 [24] Zhai S D, Li Q D. Pinning bipartite synchronization for coupled nonlinear systems with antagonistic interactions and switching topologies. Systems & Control Letters, 2016, 94: 127-132 [25] Zhai S D, Liu P. Synchronization of coupled discrete systems with competitive interactions and time-varying topologies. In: Proceedings of the 37th Chinese Control Conference (CCC). Wuhan, China: IEEE, 2018. 6896-6901 [26] Khalil H K. Nonlinear Systems. New Jersey: Prentice-Hall, 2002. -





 下载:
下载:











图(5)
计量
- 文章访问数: 1194
- HTML全文浏览量: 344
- PDF下载量: 121
- 被引次数: 0
