

The Measurement Method of Target Pose Based on Feature Points Position Calibration
-
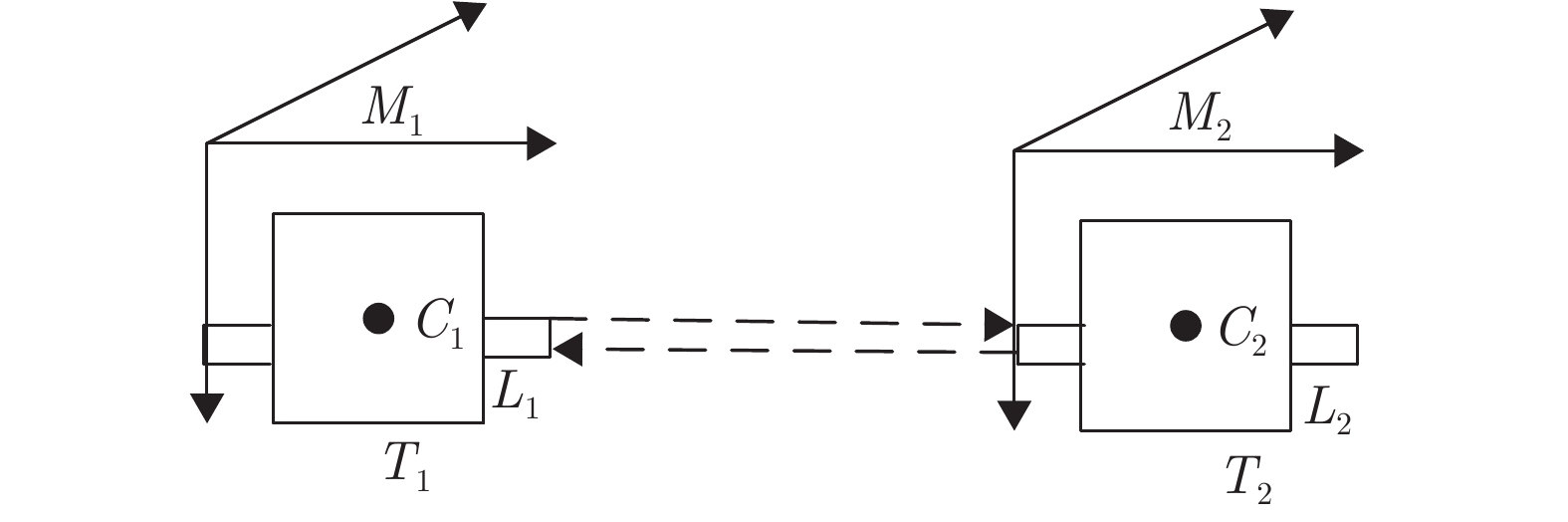
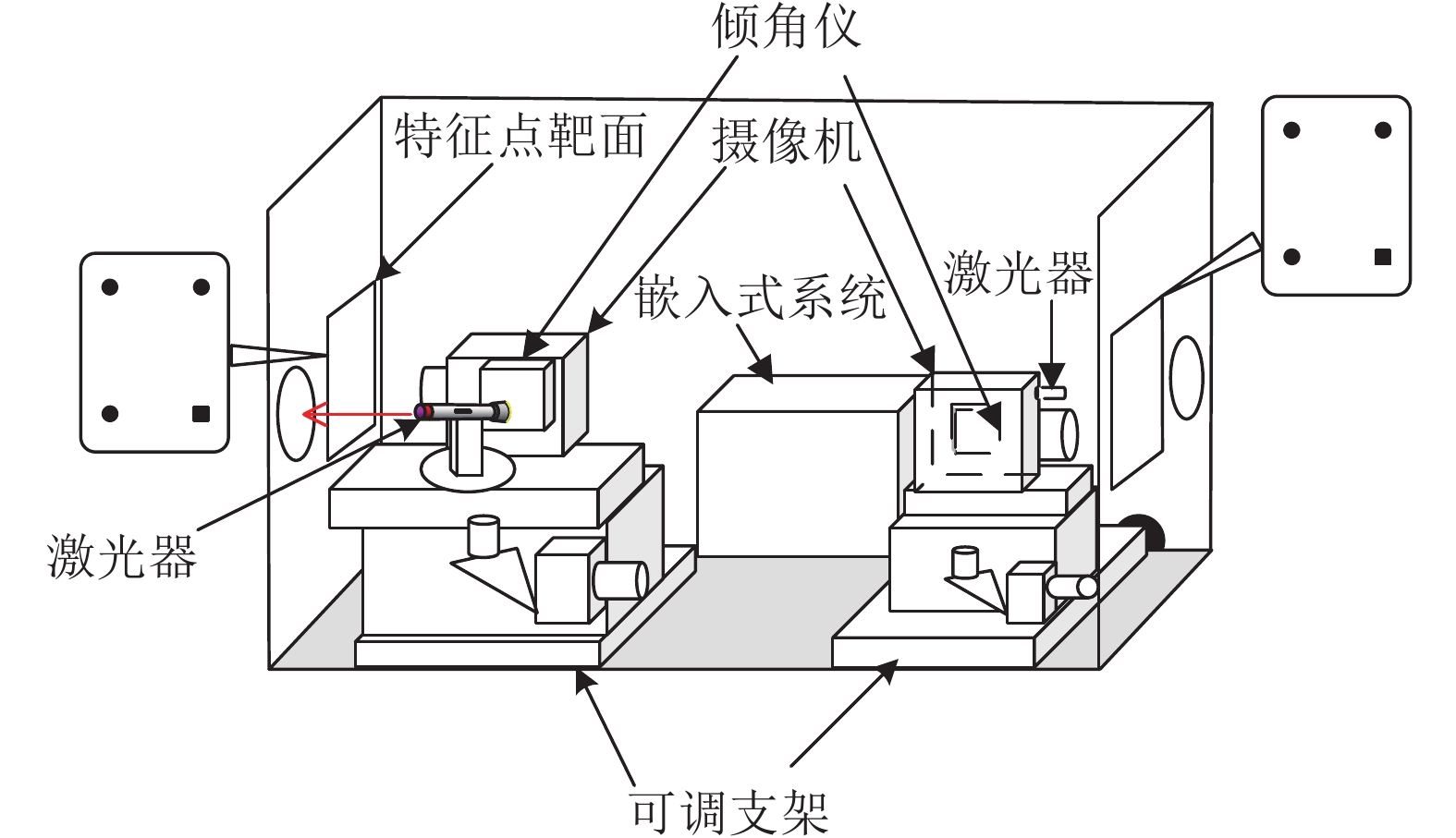
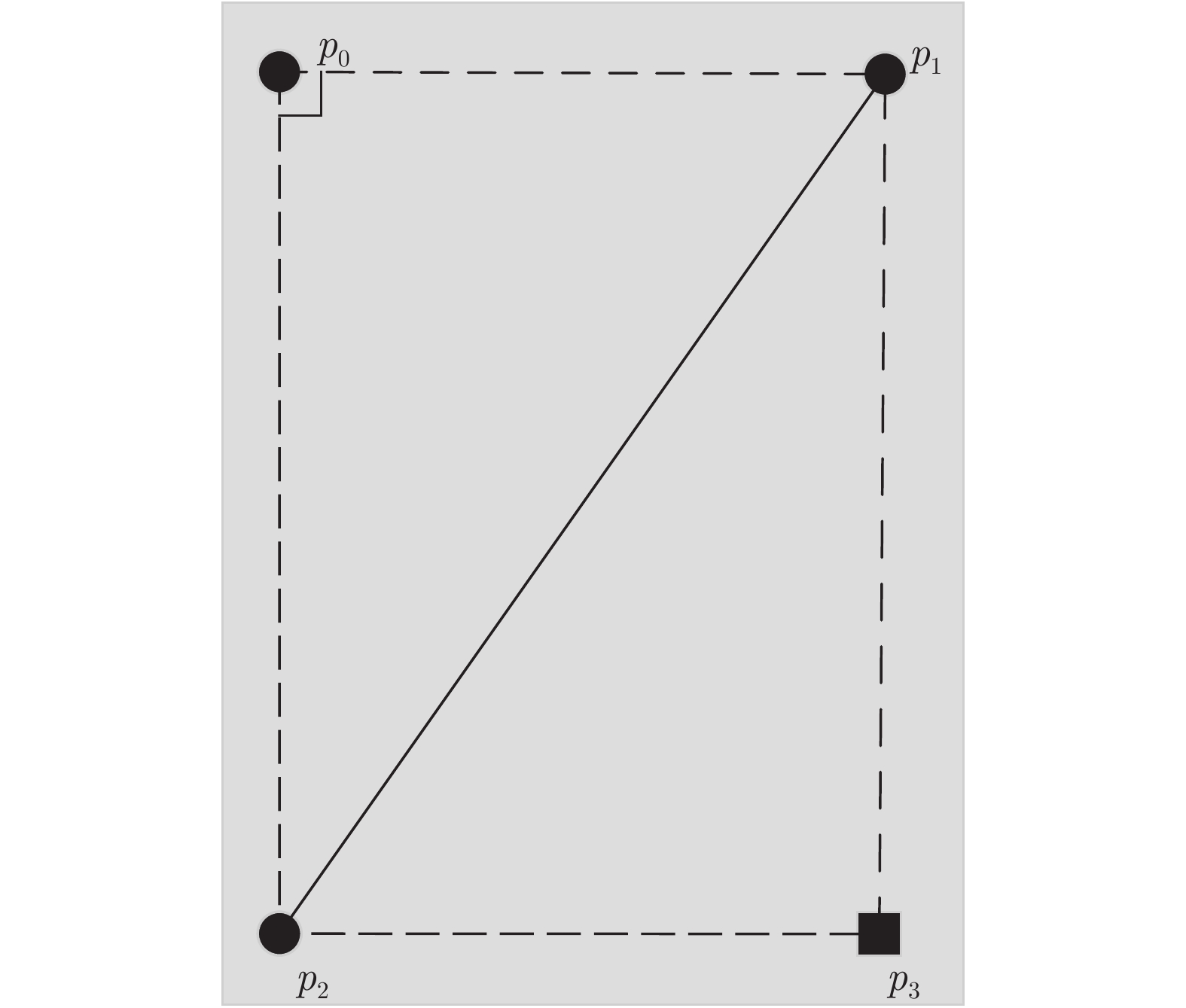
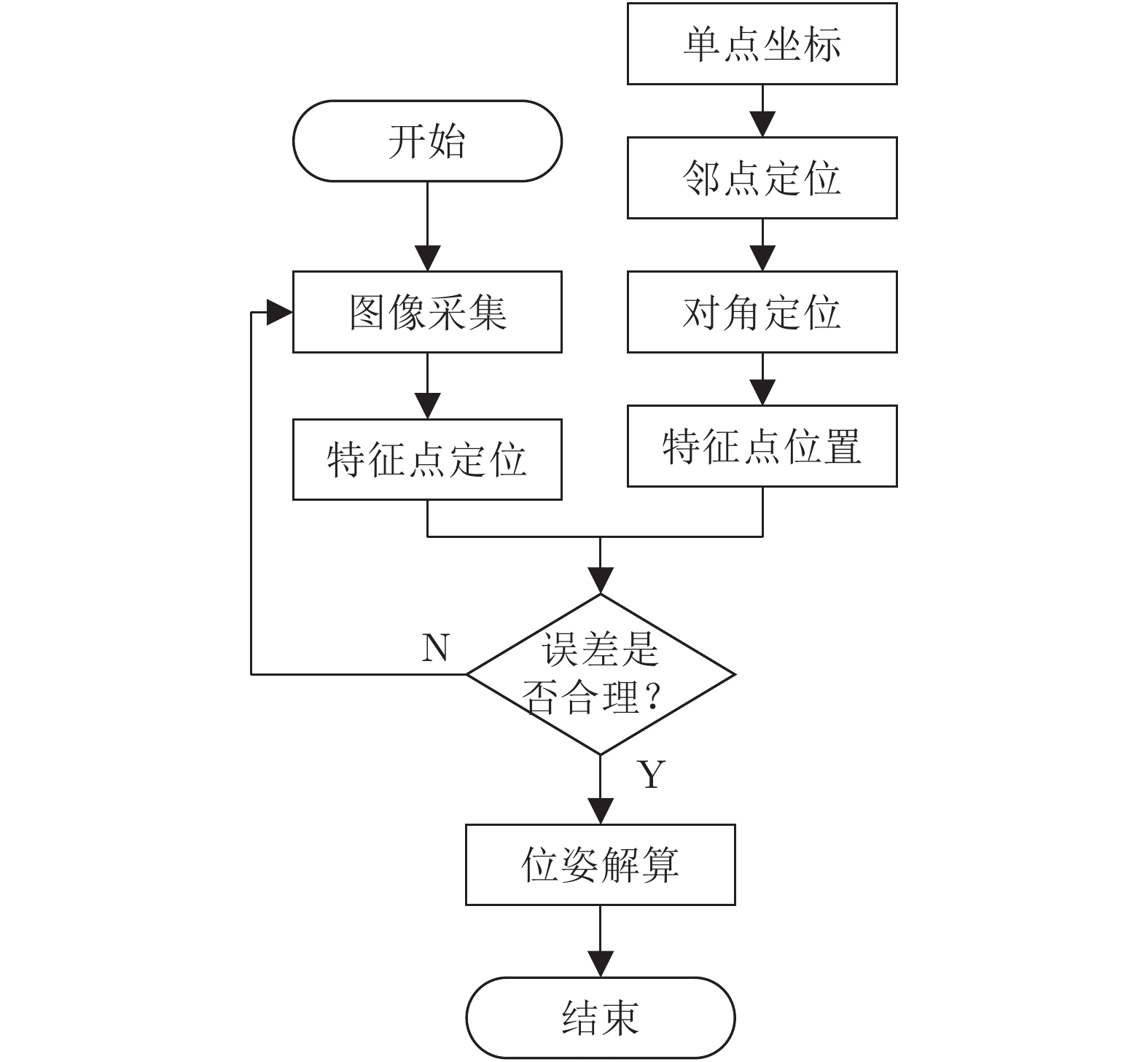
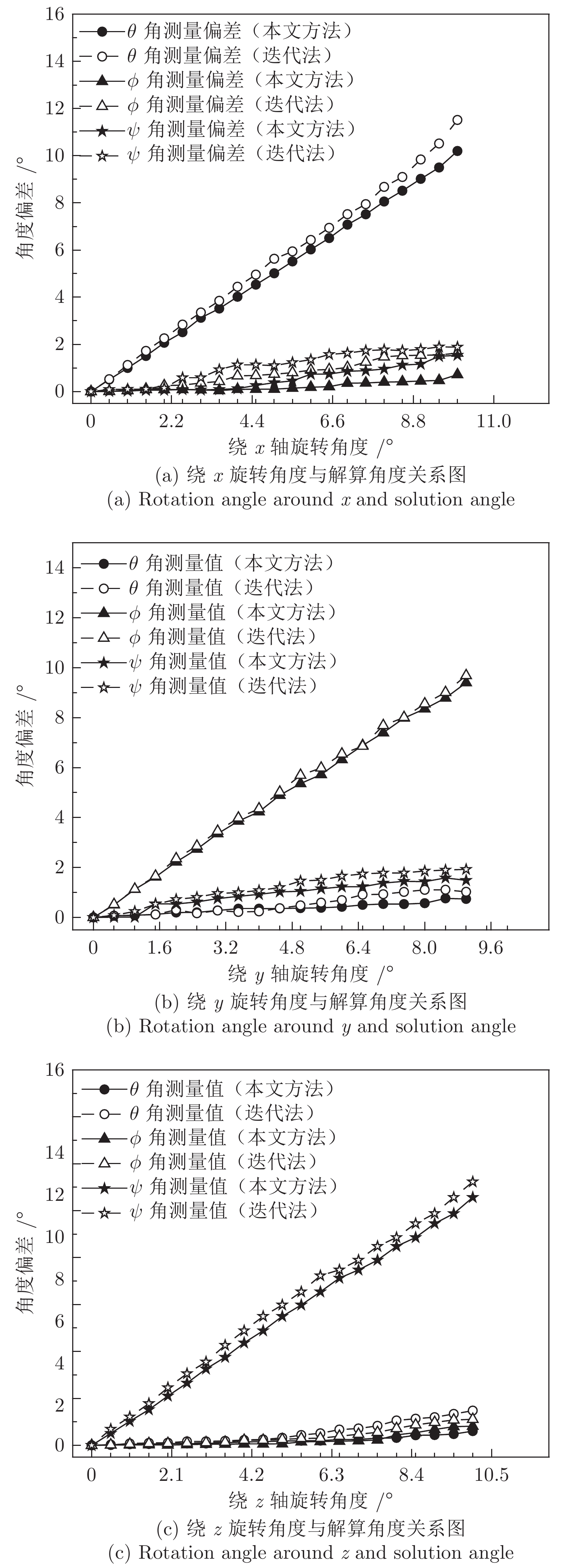
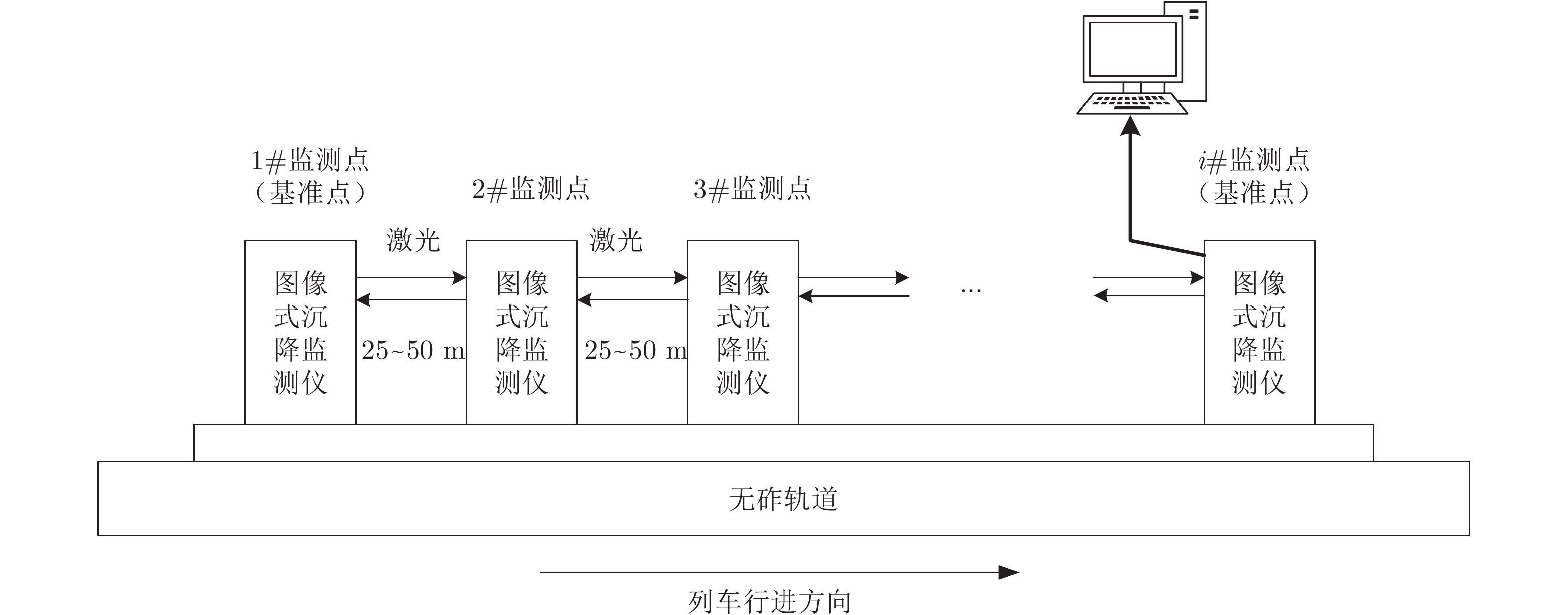
摘要: 针对图像式路基沉降监测系统中由于振动等因素导致靶标与相机发生偏转产生测量误差的问题, 本文在设计监测系统靶面位姿测量系统的基础上提出了基于4特征点位置校正的位姿测量方法. 首先介绍了图像式路基沉降监测方法的工作原理; 然后根据实际情况设计了区别于传统特征点的4特征点靶面的位姿测量系统, 并利用特殊特征点对靶面特征点进行位置校正; 最后根据设计的4特征点靶面测量系统提出已知矩形4特征点边长的位姿求解方法. 实验结果表明: 本文方法比迭代法位姿解算后角度误差值更小, 其位姿解算相对误差减小1.2 %. 当偏转角度小于2° 时, 本文方法位姿求解旋转角度误差小于0.09°, 相对角度误差为1.003 %. 其时间和测量精度都能够达到监测系统要求, 可以应用于监测系统中需要对相机和靶标进行实时标定的场景.Abstract: Aiming at the problem of measurement error caused by the deflection of the target and the camera in the image subgrade settlement monitoring system due to vibration, a pose measurement method based on 4 feature points position calibration was proposed. Firstly, the operational principle of the image based settlement monitoring method was introduced and the components and working model of the online surface settlement monitoring system were described. Then, different from the traditional feature points a pose measurement system with the 4 feature points target surface is designed, and using special feature point to calibrate the target surface. Finally, the method of target pose based on rectangular side length known was proposed. Experimental results show that the angle error of this method is smaller than that of the iterative method, the relative error of the pose solution is reduced by 1.2 %. When the deflection angle is less than 2°, the method solves the rotation angle error of less than 0.09°, the relative angular error is 1.003 %. The time and accuracy of the proposed method can meet the requirements of the monitoring system, it can also be applied to scenes in the monitoring system that require real-time calibration of the camera and target.
-
Key words:
- Subgrade settlement /
- monitoring system /
- position calibration /
- posture solution /
- measurement accuracy
-
表 1 摄像机内参数标定结果
Table 1 Inner parameter calibration of the camera calibration
${f_x}$ (像素)${f_y}$ (像素)${u_0}$ (像素)${v_0}$ (像素) ${k_1}$ ${k_2}$ 1 343.48 1 340.68 510.63 408.36 0.299602 −0.11056  下载: 导出CSV
下载: 导出CSV
-
[1] 刘雪珠, 陈国兴. 轨道交通荷载下路基土的动力学行为研究进展. 防灾减灾工程学报, 2008, 28(2): 248−2551 Liu Xue-Zhu, Chen Guo-Xing. Advances in researches on mechanical behavior of subgrade soils under repeated-load of high-speed track vehicles. Journal of Disaster Prevention and Mitigation Engineering, 2008, 28(2): 248−255 [2] 毛波. 谈铁路路基沉降问题及其控制措施. 工程建设与设计, 2008, 28(13): 99−1002 Mao Bo. Discussion on the settlement problem of railway subgrade and its control measures. Science and Technology Information, 2008, 28(13): 99−100 [3] 廖世芳, 叶满珠. 兰新高速铁路路基沉降自动化监测系统整体设计方案. 高速铁路技术, 2013, 4(5): 26−30 doi: 10.3969/j.issn.1674-8247.2013.05.0063 Liao Shi-Fang, Ye Man-Zhu. Design scheme for subgrade settlement automatic monitoring system on Lanzhou-Wulumuqi high-speed railway. High Speed Railway Technology, 2013, 4(5): 26−30 doi: 10.3969/j.issn.1674-8247.2013.05.006 [4] 张玉芝, 杜彦良, 孙宝臣, 梁建昌. 基于液力测量的高速铁路无砟轨道路基沉降变形监测方法. 北京交通大学学报, 2013, 37(1): 80−84 doi: 10.3969/j.issn.1673-0291.2013.01.0144 Zhang Yu-Zhi, Du Yan-Liang, Sun Bao-Chen, Liang Jian-Chang. High-speed railway ballastless track roadbed settlement monitoring method based on fluid pressure differential. Journal of Beijing Jiaotong University, 2013, 37(1): 80−84 doi: 10.3969/j.issn.1673-0291.2013.01.014 [5] 5 Tan Q L, Xie C. Comparison and analysis of permafrost railway subgrade settlement deformation monitoring. Applied Mechanics and Materials, 2012, 226−228: 1651−1654 doi: 10.4028/www.scientific.net/AMM.226-228.1651 [6] 花梅. 高速铁路路基常用沉降变形监测方法浅析. 铁道标准设计, 2014, 58(s1): 122−1256 Hua Mei. Analysis on common settlement deformation monitoring methods for high-speed railway subgrade. Railway Standard Design, 2014, 58(s1): 122−125 [7] 赵洪勇, 刘建坤, 崔江余. 高速铁路路基沉降监测方法的认识与评价. 路基工程, 2001, (6): 15−17 doi: 10.3969/j.issn.1003-8825.2001.06.0067 Zhao Hong-Yong, Liu Jian-Kun, Cui Jiang-Yu. Cognition and evaluation of monitoring method for subgrade settlement of high speed railway. Subgrade Engineering, 2001, (6): 15−17 doi: 10.3969/j.issn.1003-8825.2001.06.006 [8] 危凤海. 高速铁路路基沉降的几种原因及其监测方法. 筑路机械与施工机械化, 2010, 27(10): 24−27 doi: 10.3969/j.issn.1000-033X.2010.10.0138 Wei Feng-Hai. Several causes of high-speed railway subgrade settlement and its monitoring method. Road Machinery and Construction Mechanization, 2010, 27(10): 24−27 doi: 10.3969/j.issn.1000-033X.2010.10.013 [9] 于起峰, 姜广文, 丁晓华, 尚洋. 测量大型船体变形的折线光路摄像测量方法与系统研究. 庆祝中国力学学会成立50周年暨中国力学学会学术大会, 中国北京, 2007.Yu Qi-Feng, Jiang Guang-Wen, Ding Xiao-Hua, Shang Yang. Research on measurement method and system of optical line camera measurement for measuring large ship hull deformation.In: Proceedings of the China Society of Theoretical and Applied Mechanics, Bejing, China, 2007. [10] 姜广文. 像机链位姿传递摄像测量方法及船体变形测量研究[博士学位论文], 国防科学技术大学, 中国, 2010.Jiang Guang-Wen. Research on Camera Measurement Method and Ship Deformation Measurement [Ph.D.dissertation], National University of Defense Technology, China, 2010. [11] 尚洋, 于起峰, 关棒磊, 孙聪, 钟立军, 刘海波, 张小虎. 大型结构变形监测摄像测量研究进展. 实验力学, 2017, 32(5): 593−60011 Shang Yang, Yu Qi-Feng, Guan Bang-Lei, Sun Cong, Zhong Li-Jun, Liu Hai-Bo, Zhang Xiao-Hu. Research progress in large-scale structural deformation monitoring camera measurement. Experimental Mechanics, 2017, 32(5): 593−600 [12] 闵永智, 党建武, 张振海. 图像式无砟轨道表面沉降在线监测系统. 光学精密工程, 2013, 21(6): 1621−162712 Min Yong-Zhi, Dang Jian-Wu, Zhang Zhen-Hai. On-line monitoring system for surface settlement of image ballastless track. Optical Precision Engineering, 2013, 21(6): 1621−1627 [13] 闵永智, 郭薇, 党建武. 高铁路基沉降监测系统靶面图像中心定位. 光学精密工程, 2017, 25(10s): 288−29613 Min Yong-Zhi, Guo Wei, Dang Jian-Wu. Center positioning of target surface image for subgrade settlement monitoring system of high-speed rail. Optical Precision Engineering, 2017, 25(10s): 288−296 [14] 秦运柏, 徐汶菊, 朱君. 基于激光光斑中心检测的改进算法. 实验技术与管理, 2018, 261(5): 66−7314 Qin Yun-Bai, Xu Wen-Ju, Zhu Jun. An improved algorithm based on laser spot detection. Laboratory Technology and Management, 2018, 261(5): 66−73 [15] 曹远佳, 尉广军, 李先龙. 激光光斑的图像处理及边缘检测的改进. 激光与红外, 2016, 46(9): 1160−1164 doi: 10.3969/j.issn.1001-5078.2016.09.02815 Cao Yuan-Jia, Wei Guang-Jun, Li Xian-Long. Improvement of image processing and edge detection of laser spot. Laser and Infrared, 2016, 46(9): 1160−1164 doi: 10.3969/j.issn.1001-5078.2016.09.028 [16] 张绍堂, 吴鸿, 宁德琼. 一种高精度的激光图像光斑中心检测方法. 激光杂志, 2018, 39(8): 153−15616 Zhang Shao-Tang, Wu Hong, Ning De-Qiong. A high precision laser image spot detection method. Journal of Lasers, 2018, 39(8): 153−156 [17] 于起峰, 孙祥一, 姜广文, 刘肖琳, 张小虎, 周剑, 尚洋. 基于传递像机摄像测量的不稳定平台的静态基准转换方法. 中国科学: 技术科学, 2011, 41(5): 681−68617 Yu Qi-Feng, Sun Xiang-Yi, Jiang Guang-Wen, Liu Xiao-Lin, Zhang Xiao-Hu, Zhou Jian, Shang Yang. Relay camera videometrics based conversion method for unstable platform to static reference. Science China Technological Sciences, 2011, 41(5): 681−686 [18] 何斐彦, 林嘉睿, 高扬, 任永杰, 邾继贵. 单目视觉与倾角仪组合优化的位姿测量系统. 光学学报, 2016, 36(12): 190−19718 He Fei-Yan, Lin Jia-Rui, Gao Yang, Ren Yong-Jie, Zhu Ji-Gui. Pose measurement system optimized by combination of monocular vision and inclinometer. Acta Optica Sinica, 2016, 36(12): 190−197 [19] 刘进博, 郭鹏宇, 李鑫, 张小虎. 基于点对应的相机姿态估计算法性能评价. 光学学报, 2016, 36(5): 121−13019 Liu Jin-Bo, Guo Peng-Yu, Li Xin, Zhang Xiao-Hu. Performance evaluation of camera attitude estimation algorithm based on point correspondence. Acta Optica Sinica, 2016, 36(5): 121−130 [20] 郝颖明, 朱枫, 欧锦军, 吴清潇, 周静, 付双飞. 基于点特征的位姿测量系统鲁棒性分析. 计算机应用, 2008, 28(7): 1713−171620 Hao Ying-Ming, Zhu Feng, Ou Jin-Jun, Wu Qing-Xiao, Zhou Jing, Fu Shuang-Fei. Robust analysis of pose measurement system based on point feature. Journal of Computer Applications, 2008, 28(7): 1713−1716 [21] 孙凤梅, 王波. 关于PnP问题多解的分布与解的稳定性的讨论. 自动化学报, 2010, 36(9): 1213−121921 Sun Feng-Mei, Wang Bo. A note on the roots distribution and stability of the PnP problem. Acta Automatica Sinica, 2010, 36(9): 1213−1219 -

 下载:
下载:









图(10) / 表(1)
计量
- 文章访问数: 2334
- HTML全文浏览量: 992
- PDF下载量: 185
- 被引次数: 0
