

Cooperative Optimization Method for High-speed Trains Running Time and Energy Saving Based on Block Sections
-
摘要: 提出了一种高速列车运行时间与节能协同优化方法. 针对由动态调度层、优化控制层、跟踪控制层组成的列车运行控制与动态调度一体化结构, 设计了面向动态调度层和优化控制层的列车运行时间调整策略和节能速度位置曲线. 基于高速铁路闭塞区间, 建立了列车 − 区间模型和列车速度曲线节能优化模型. 利用模型预测控制方法对列车区间运行时间进行调整, 优化列车总延误时间; 根据调整后的区间运行时间设计列车运行优化速度位置曲线, 减少列车运行能耗. 仿真算例验证了设计的运行时间与节能协同优化策略的有效性.Abstract: A cooperative optimization method for high-speed trains running time and energy saving is proposed. For the integrated scheme of train operation control and dynamic rescheduling which consists of dynamic rescheduling layer, optimization control layer and tracking control layer, the running time adjustment strategy and energy saving speed-position trajectory are designed for dynamic rescheduling layer and optimization control layer. The train-section model and energy saving speed trajectory model are established based on the block sections of high-speed railway. The model predictive control method is utilized to adjust the section running time of trains and optimize the total delay time of trains. Then according to the adjusted section running time, the optimal speed-position trajectory is generated for each train so as to reduce the energy consumption. Numerical examples are given to illustrate the effectiveness of the proposed running time and energy saving cooperative optimization strategy.
-
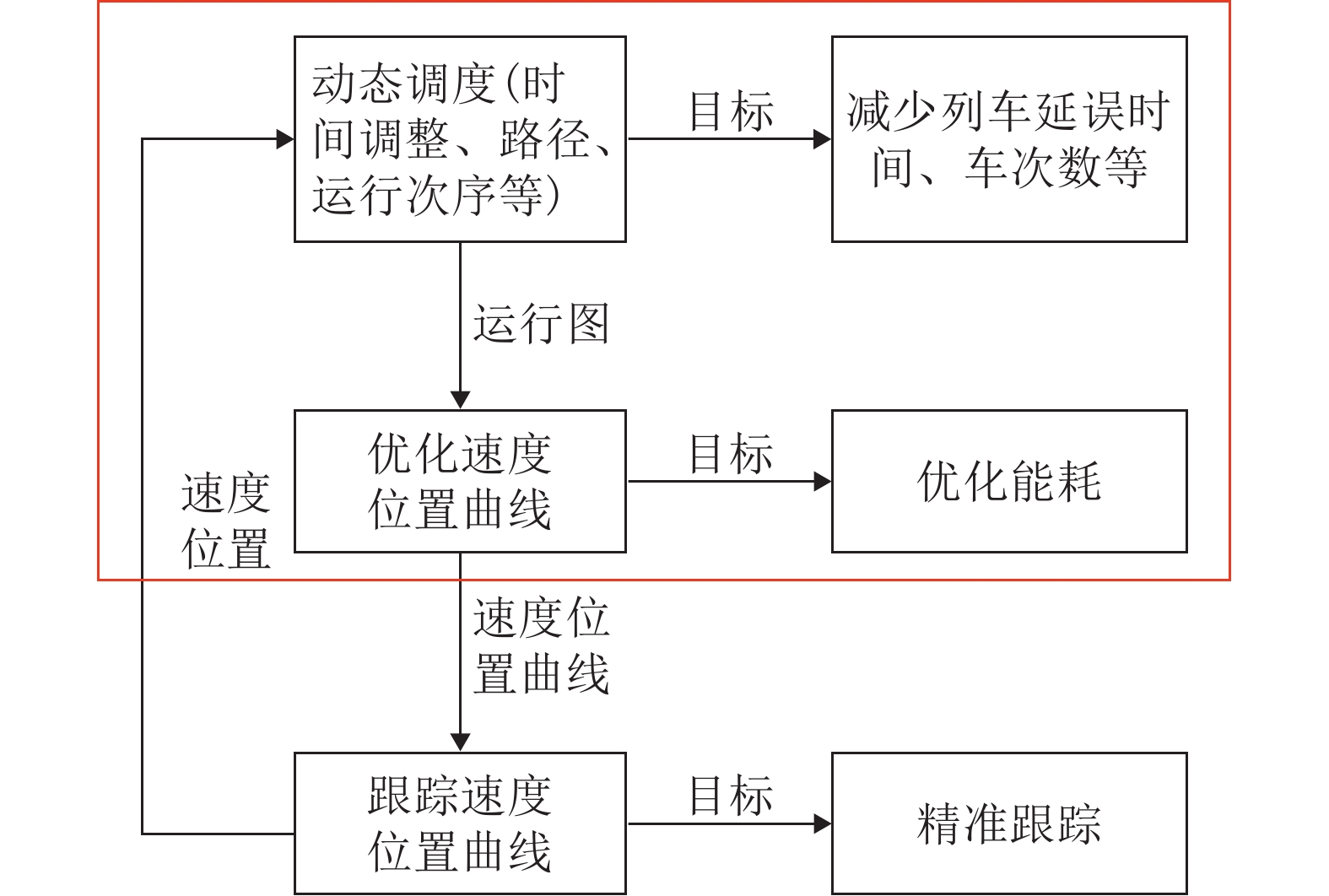
图 1 动态调度和运行控制一体化结构图
Fig. 1 Integrated structure diagram of dynamic rescheduling and operation control
-
[1] 孙亚华. 高速列车运行控制与动态调度一体化的研究[硕士学位论文], 北京交通大学, 2015.Sun Ya-Hua. The Integration Study of High-Speed Train Operation Control and Scheduling [Master thesis], Beijing Jiaotong University, 2015. [2] 2 Gao S G, Hou Y H, Dong H R, Stichel S, Ning B. High-speed trains automatic operation with protection constraints: a resilient nonlinear gain-based feedback control approach. IEEE/CAA Journal of Automatica Sinica, 2019, 6(4): 992−999 doi: 10.1109/JAS.2019.1911582 [3] 3 Gao S G, Dong H R, Ning B, Zhang Q. Cooperative prescribed performance tracking control for multiple high-speed trains in moving block signaling system. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(7): 2740−2749 doi: 10.1109/TITS.2018.2877171 [4] 4 Albrecht A R, Howlett P G, Pudney P J, Vu X. Energy-efficient train control: from local convexity to global optimization and uniqueness. Automatica, 2013, 49(10): 3072−3078 doi: 10.1016/j.automatica.2013.07.008 [5] 5 Yan X H, Cai B G, Ning B, Wei S G. Moving horizon optimization of dynamic trajectory planning for high-speed train operation. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(5): 1258−1270 doi: 10.1109/TITS.2015.2499254 [6] 6 Yang H, Zhang K P, Liu H E. Online regulation of high speed train trajectory control based on T-S fuzzy bilinear model. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1496−1508 doi: 10.1109/TITS.2015.2497320 [7] 7 Li L, Dong W, Ji Y D, Zhang Z K, Lang T. Minimal-energy driving strategy for high-speed electric train with hybrid system model. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(4): 1642−1653 doi: 10.1109/TITS.2013.2265395 [8] 8 Fang W, Yang S X, Yao X. A survey on problem models and solution approaches to rescheduling in railway networks. IEEE Transactions on Intelligent Transportation Systems, 2016, 16(6): 2997−3016 [9] 9 Binder S, Maknoon Y, Bierlaire M. The multi-objective railway timetable rescheduling problem. Transportation Research Part C Emerging Technologies, 2017, 78: 78−94 doi: 10.1016/j.trc.2017.02.001 [10] 10 Dong H R, Zhu H N, Li Y D, Lv Y S, Gao S G, Zhang Q, et al. Parallel intelligent systems for integrated high-speed railway operation control and dynamic scheduling. IEEE Transactions on Cybernetics, 2018, 48(12): 3381−3389 doi: 10.1109/TCYB.2018.2852772 [11] 11 Zheng Y J. Emergency train scheduling on Chinese high-speed railways. Transportation Science, 2018, 52(5): 1077−1091 doi: 10.1287/trsc.2017.0794 [12] 12 Krasemann J T. Design of an effective algorithm for fast response to the re-scheduling of railway traffic during disturbances. Transportation Research Part C Emerging Technologies, 2012, 20(1): 62−78 doi: 10.1016/j.trc.2010.12.004 [13] 13 Shakibayifar M, Sheikholeslami A, Corman F. A simulation-based optimization approach to rescheduling train traffic in uncertain conditions during disruptions. Scientia Iranica, 2018, 25(2): 646−662 [14] 14 Yang L X, Qi J G, Li S K, Gao Y. Collaborative optimization for train scheduling and train stop planning on high-speed railways. Omega, 2016, 64: 57−76 doi: 10.1016/j.omega.2015.11.003 [15] Zhou W L, Tian J L, Qin J, Deng L B, Wei T J. Optimization of multiperiod mixed train schedule on high-speed railway. Discrete Dynamics in Nature and Society, 2015, Article ID: 107048 [16] 16 Hou Z P, Dong H R, Gao S G, Nicholson G, Chen L, Roberts C. Energy-saving metro train timetable rescheduling model considering ATO profiles and dynamic passenger flow. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(7): 2774−2785 doi: 10.1109/TITS.2019.2906483 [17] 17 Yan X H, Cai B, Ning B, Wei S G. Online distributed cooperative model predictive control of energy-saving trajectory planning for multiple high-speed train movements. Transportation Research Part C Emerging Technologies, 2016, 69: 60−78 doi: 10.1016/j.trc.2016.05.019 [18] 范家璐, 张也维, 柴天佑. 一类工业过程运行反馈优化控制方法. 自动化学报, 2015, 41(10): 1754−176118 Fan Jia-Lu, Zhang Ye-Wei, Chai Tian-You. Optimal operational feedback control for a class of industrial processes. Acta Automatica Sinica, 2015, 41(10): 1754−1761 [19] 19 Li S K, Zhou X S, Yang L X, Gao Z Y. Automatic train regulation of complex metro networks with transfer coordination constraints: a distributed optimal control framework. Transportation Research Part B Methodological, 2018, 117: 228−253 doi: 10.1016/j.trb.2018.09.001 [20] 20 Li S K, Yang L X, Gao Z Y. Efficient real-time control design for automatic train regulation of metro loop lines. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(2): 485−496 doi: 10.1109/TITS.2018.2815528 [21] 21 Wang X, Li S K, Su S, Tang T. Robust fuzzy predictive control for automatic train regulation in high-frequency metro lines. IEEE Transactions on Fuzzy Systems, 2019, 27(6): 1295−1308 doi: 10.1109/TFUZZ.2018.2877593 [22] 22 Van Breusegem S, Campion G, Bastin G. Traffic modeling and state feed back control for metro lines. IEEE Transactions on Automatic Control, 1991, 36(7): 770−784 doi: 10.1109/9.85057 [23] 23 Su S, Tang T, Li X, Gao Z Y. Optimization of multitrain operations in a subway system. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 673−684 doi: 10.1109/TITS.2013.2285737 [24] Zhao H, Dai X W, Zhang M, Zhang Q. An event-triggered robust cruise control strategy for multiple high-speed trains. In: Proceedings of the 30th Chinese Control and Decision Conference. Shenyang, China: IEEE, 2018. 2041−2046 [25] Tang H Y, Ge X C, Liu Q Q, Wang Q Y. Robust H∞ control of high-speed trains with parameter uncertainties and unpredictable time-varying delays. In: Proceedings of the 35th Chinese Control Conference. Chengdu, China: IEEE, 2016. 10173−10178 [26] 26 Dong H R, Gao S G, Ning B, Li L. Extended fuzzy logic controller for high speed train. Neural Computing and Applications, 2013, 22(2): 321−328 doi: 10.1007/s00521-011-0681-8 [27] 27 Zhou Y H, Zhang Z L. High-speed train control based on multiple-model adaptive control with second-level adaptation. Vehicle System Dynamics, 2014, 52(5): 637−652 doi: 10.1080/00423114.2014.887209 [28] 28 Ji H H, Hou Z S, Zhang R K. Adaptive iterative learning control for high-speed trains with unknown speed delays and input saturations. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 260−273 doi: 10.1109/TASE.2014.2371816 [29] 29 Tang H Y, Wang Q Y, Feng X Y. Robust stochastic control for high-speed trains with nonlinearity, parametric uncertainty, and multiple time-varying delays. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(4): 1027−1037 doi: 10.1109/TITS.2017.2710138 [30] 徐君, 张国良, 曾静, 杜柏阳, 贾枭. 高阶离散多智能体系统在参数不确定和带外部干扰下的鲁棒H∞一致性控制. 自动化学报, 2017, 43(10): 1850−185730 Xu Jun, Zhang Guo-Liang, Zeng Jing, Du Bo-Yang, Jia Xiao. Robust H∞ consensus control for high-order discrete time multi-agent systems with parameter uncertainties and external disturbances. Acta Automatica Sinica, 2017, 43(10): 1850−1857 [31] 俞立. 鲁棒控制——线性矩阵不等式处理方法. 北京: 清华大学出版社, 2002. 41−59Yu Li. Robust Control — Linear Matrix Inequality Method. Beijing: Tsinghua University Press, 2002. 41−59 -

 下载:
下载:


图(7)
计量
- 文章访问数: 3086
- HTML全文浏览量: 1110
- PDF下载量: 219
- 被引次数: 0
