

Reliability and Safety Evaluation of Autonomous Computer System of Intelligent CTC in High Speed Railway
-
摘要: 自律机系统是智能调度集中控制(Centralized traffic control, CTC)系统的核心, 其安全性和可靠性都至关重要. 首先分析了双机热备自律机系统和二乘二取二自律机系统的结构及工作原理; 然后综合考虑自律机分机的故障检出率和故障发生率等因素, 采用Markov模型, 构建了两个系统的安全度和可靠度模型. MATLAB仿真结果表明, 双机热备自律机系统的可靠性高于二乘二取二自律机系统的, 但双机热备自律机系统的安全度远低于二乘二取二自律机系统的, 因此二乘二取二自律机系统更能保障CTC系统的安全.Abstract: Autonomous computer system is the core of the intelligent centralized traffic control (CTC) system, and its safety and reliability are very important. Firstly, the structure and working principle of the dual computer hot standby autonomous system and the double 2-vote-2 autonomous system are analyzed; Then, the factors such as error detection rate and failure rate are considered. Next, combined with the Markov model, the safety and reliability model of two systems are established. MATLAB simulation results show that the reliability of the dual computer hot standby autonomous system is higher than that of the double 2-vote-2 autonomous system, but the safety of the dual computer hot standby autonomous system is much lower than that of the double 2-vote-2 autonomous system, so the double 2-vote-2 autonomous system can guarantee the security of CTC system more.
-
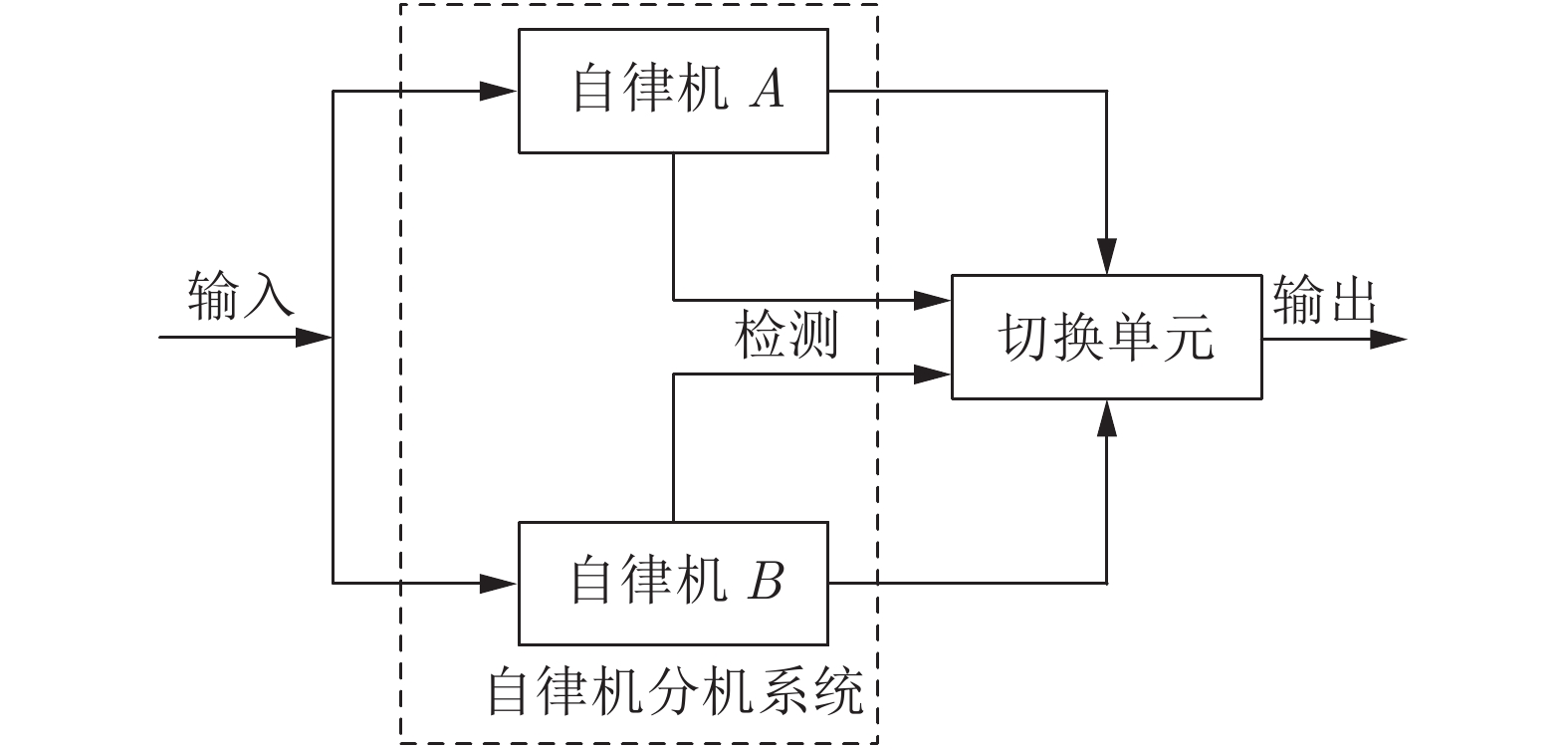
图 1 双机热备自律机系统结构图
Fig. 1 The structure of double hot standby autonomous computer system
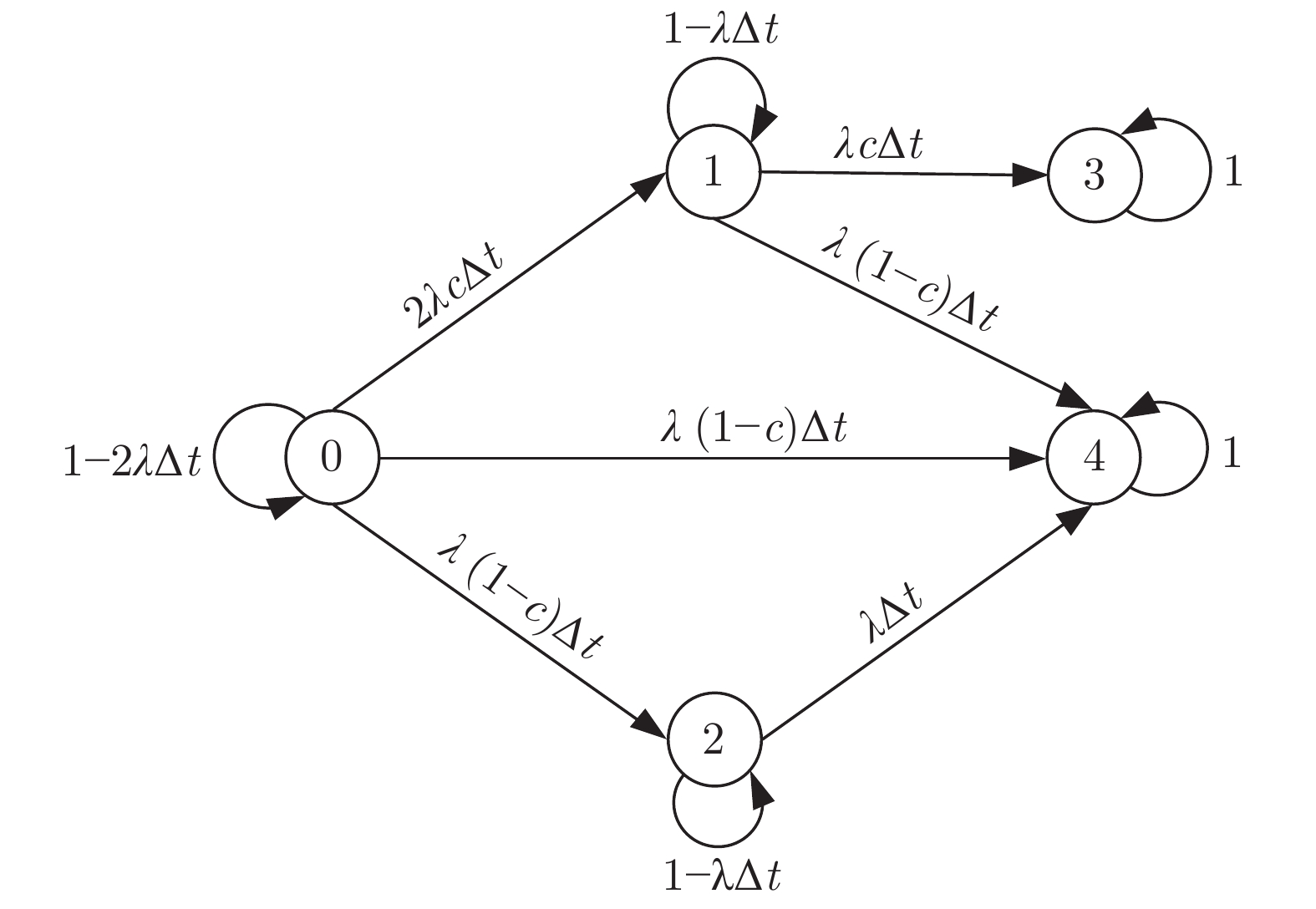
图 4 双机热备自律机系统的状态转移图
Fig. 4 The state transition diagram of double hot standby autonomous computer system

图 5 二乘二取二自律机系统的状态转移图
Fig. 5 The state transition diagram of double 2-vote-2 autonomous computer system
表 1 双机热备自律机系统的状态定义及解释说明
Table 1 Definition and explanation of double hot standby autonomous computer system state
状态定义 状态解释说明 状态 0 两台自律机均未发生故障, 系统处于正常工作状态. 状态 1 两台自律机中有且仅有一台自律机出现故障并且可测, 系统处于降级工作状态. 状态 2 两台自律机中的工作主机正常, 热备分机发生故障并且不可测, 系统处于降级工作状态. 状态 3 两台自律机均出现故障并且可测, 系统处于故障—安全状态. 状态 4 两台自律机中的工作主机出现故障并且不可测, 系统危险状态.  下载: 导出CSV
下载: 导出CSV
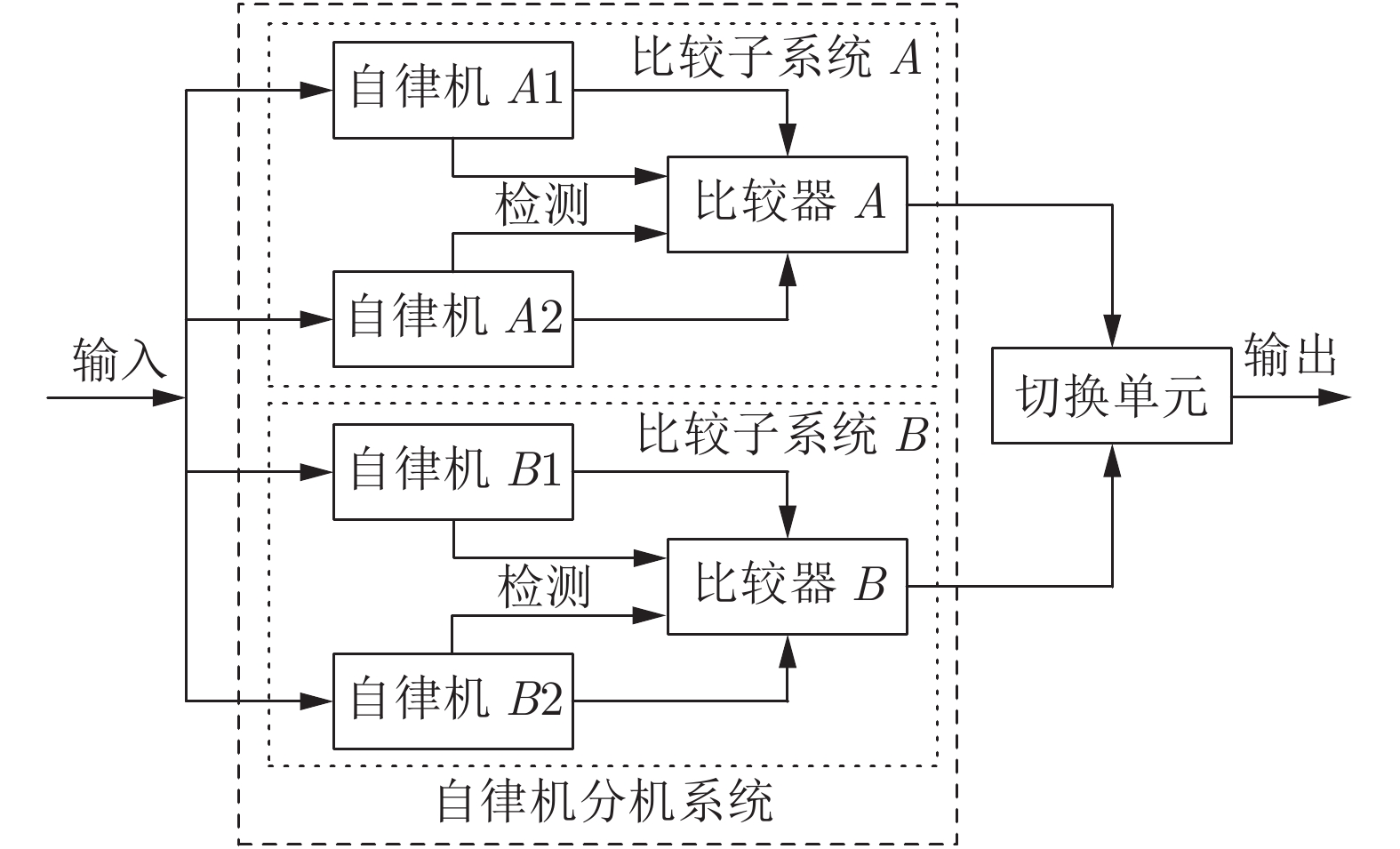
表 2 二乘二取二自律机系统的状态定义及解释说明
Table 2 Definition and explanation of double 2-vote-2 autonomous computer system state
状态定义 状态解释说明 状态 0 四台自律机均未发生故障, 系统处于正常工作状态. 状态 1 两个比较子系统中, 其中一个子系统中的一台自律机出现故障并且可测, 系统处于降级工作状态. 状态 2 两个比较子系统中, 其中一个子系统中的一台自律机出现故障并且不可测, 系统处于降级工作状态. 状态 3 两个比较子系统中, 其中一个子系统中的两台自律机均出现故障, 系统处于降级工作状态. 状态 4 两个比较子系统都出现故障, 系统处于故障—安全状态.
下载: 导出CSV
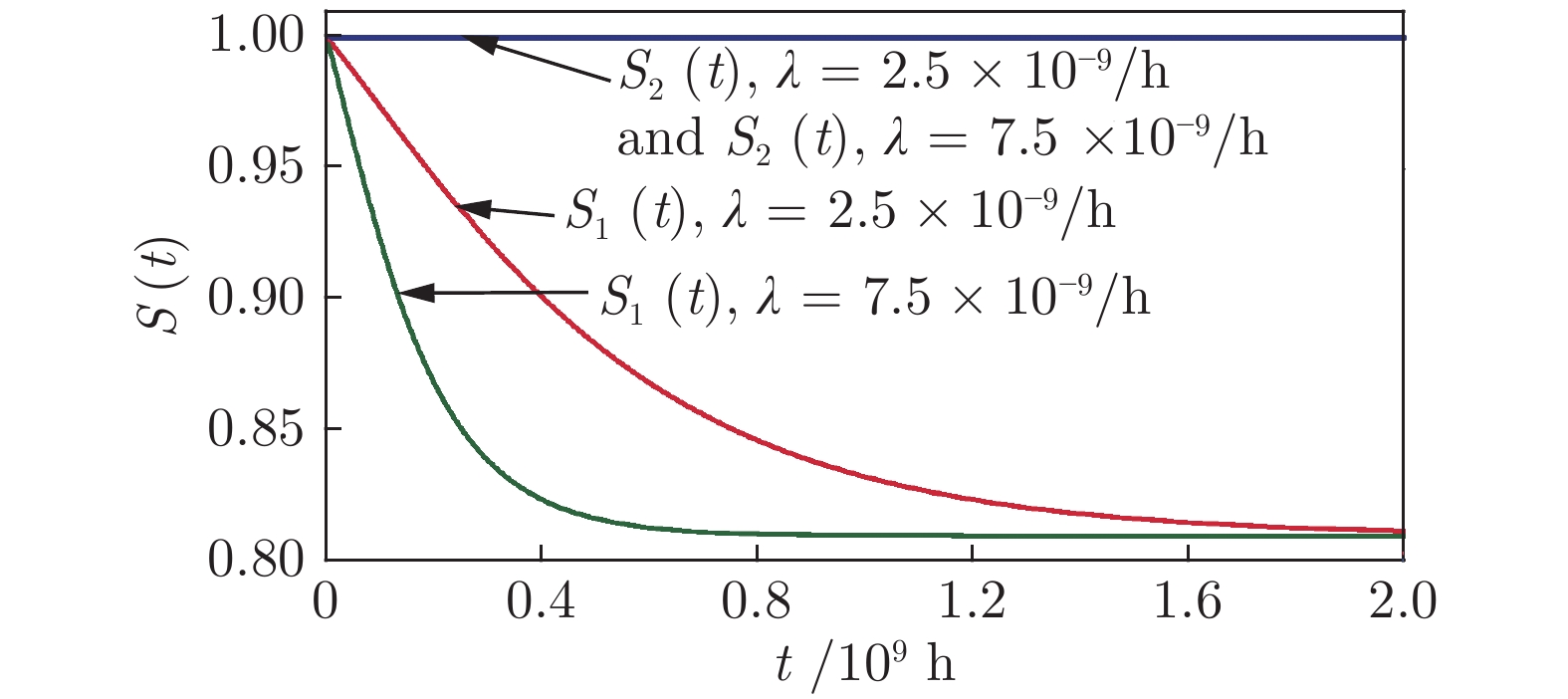
表 3 不同仿真时间和故障率下的安全度和可靠度比较
Table 3 The degree of reliability and safety at different failure rates and times
仿真时间t (h) 故障率λ(h−1) 可靠度R (%) 安全度S (%) R1 R2 $\frac{{{R_2} - {R_1}}}{{{R_1}}}$ S1 S2 $\frac{{{S_2} - {S_1}}}{{{S_1}}}$ 5.0 × 107 2.5 × 10−9 97.58 95.11 −2.53 98.70 100.00 1.32 5.0 × 107 7.5 × 10−9 88.07 72.16 −18.07 95.99 100.00 4.18 1.0 × 108 2.5 × 10−9 93.38 84.52 −9.49 97.35 100.00 2.72 1.0 × 108 7.5 × 10−9 69.67 39.65 −43.09 92.22 100.00 8.44
下载: 导出CSV
-
[1] 陈显锋, 王忠卫. 自律机双机热备倒机装置的设计与实现. 铁路通信信号工程技术, 2015, 12(4): 86−87 doi: 10.3969/j.issn.1673-4440.2015.04.0241 Chen Xian-Feng, Wang Zhong-Wei. The design and implementation of the double hot standby machine of autonomous machine. Railway Signaling and Communication Engineering, 2015, 12(4): 86−87 doi: 10.3969/j.issn.1673-4440.2015.04.024 [2] 中国铁路总公司. 分散自律调度集中系统. 北京: 中国铁道出版社, 2014, 76−80China Railway Corporation. Decentralized and autonomous CTC system. Beijing: China Railway Publishing House, 2014, 76−80 [3] 3 Samet R. Recovery device for real-time dual-redundant computer systems. IEEE Transactions on Dependable and Secure Computing, 2011, 8(3): 391−403 [4] 史文路, 胡平. 双机热备份系统的研究与改进. 微处理机, 2008, 29(3): 180−182 doi: 10.3969/j.issn.1002-2279.2008.03.0594 Shi Wen-Lu, Hu Ping. The research and improvement in duplex hot-backup system. Microprocessors, 2008, 29(3): 180−182 doi: 10.3969/j.issn.1002-2279.2008.03.059 [5] 李杰, 沈锐. 空间计算机冗余架构可靠性分析比较. 深空探测学报, 2018, 5(6): 575−5815 Li Jie, Shen Rui. Analysis and comparison of reliability of computer redundancy architecture in space. Journal of Deep Space Exploration, 2018, 5(6): 575−581 [6] 孙广路, 张洛什, 薛一波. 秸秆资源海量存储系统的设计与实现. 计算机研究与发展, 2011, 48(S1): 78−836 Sun Guang-Lu, Zhang Luo-Shi, Xue Yi-Bo. Straw resource mass storage system's design and implementation. Journal of Computer Research and Development, 2011, 48(S1): 78−83 [7] 7 Park K, Kim S. Availability analysis and improvement of active/standby cluster systems using software rejuvenation. Journal of Systems and Software, 2002, 61(2): 121−128 doi: 10.1016/S0164-1212(01)00107-8 [8] 8 Mukherjee A, Dhar A S. Real-time fault-tolerance with hot-standby topology for conditional sum adder. Microelectronics Reliability, 2015, 55(3−4): 704−712 doi: 10.1016/j.microrel.2014.12.011 [9] 9 Levitin G, Xing L, Dai Y. Cold vs. hot standby mission operation cost minimization for 1-out-of-N systems. European Journal of Operational Research, 2014, 234(1): 155−162 doi: 10.1016/j.ejor.2013.10.051 [10] 王江江, 李志强, 赵亮. 双机热备系统的主备切换研究. 铁道通信信号, 2015, 51(2): 11−1210 Wang Jiang-Jiang, Li Zhi-Qiang, Zhao Liang. Research on switch of the dual machine hot standby system. Railway Signaling and Communication, 2015, 51(2): 11−12 [11] 闫剑平, 汪希时. 两种方式双机热备结构的可靠性和安全性分析. 铁道学报, 2000, 22(3): 124−127 doi: 10.3321/j.issn:1001-8360.2000.03.02811 Yan Jian-Ping, Wang Xi-Shi. Reliability and safety analysis of two modes of dual module hot spare architecture. Journal of the China Railway Society, 2000, 22(3): 124−127 doi: 10.3321/j.issn:1001-8360.2000.03.028 [12] 胡爱锋, 杨玉群. 重庆单轨交通道岔电控系统的设计研究. 铁道工程学报, 2009, 26(11): 73−75 doi: 10.3969/j.issn.1006-2106.2009.11.01712 Hu Ai-Feng, Yang Yu-Qun. Design and research on the electric control system for turnout of urban mass transit in Chongqing. Journal of Railway Engineering Society, 2009, 26(11): 73−75 doi: 10.3969/j.issn.1006-2106.2009.11.017 [13] 王秀娟. 调度集中系统中双机热备机制的实现. 北京交通大学学报, 2009, 33(2): 26−29 doi: 10.3969/j.issn.1673-0291.2009.02.00613 Wang Xiu-Juan. Research and realization of hot standby for centralized traffic control system. Journal of Beijing Jiaotong University, 2009, 33(2): 26−29 doi: 10.3969/j.issn.1673-0291.2009.02.006 [14] 孙蕾, 徐洪泽. 双机热备计算机联锁控制系统的安全性和可用性分析. 中国安全科学学报, 2004, 14(7): 30−33 doi: 10.3969/j.issn.1003-3033.2004.07.00814 Sun Lei, Xu Hong-Ze. Study of security and usability of the dual module hot spare computer interlocking control system. China Safety Science Journal, 2004, 14(7): 30−33 doi: 10.3969/j.issn.1003-3033.2004.07.008 [15] 刘芳, 王海峰. 二乘二取二与双机热备计算机联锁系统性能比较. 铁道通信信号, 2008, 44(2): 26−29 doi: 10.3969/j.issn.1000-7458.2008.02.01115 Liu Fang, Wang Hai-Feng. Comparison of the performance of double 2-vote-2 computer-based interlocking system and double hot standby computer-based interlocking system. Railway Signalling and Communication, 2008, 44(2): 26−29 doi: 10.3969/j.issn.1000-7458.2008.02.011 [16] 文俊, 苏宏升, 沈强. 两种铁路信号系统双机热备结构可靠性与安全性分析. 铁道标准设计, 2015, 59(3): 110−11316 Wen Jun, Su Hong-Sheng, Shen Qiang. Reliability and security analysis on two railway signal dual computer hot standby systems. Railway Standard Design, 2015, 59(3): 110−113 [17] 李军丽, 张友鹏. 基于动态故障树的计算机联锁系统安全性及性能分析研究. 铁道科学与工程学报, 2019, 16(6): 1543−155217 Li Jun-Li, Zhang You-Peng. Research on safety and performance analysis of computer based interlocking system based on dynamic fault tree analysis. Journal of Railway Science and Engineering, 2019, 16(6): 1543−1552 [18] 18 Kumar, K V, Chandra V. Transputer-based fault-tolerant and fail-safe node for dual ring distributed railway signaling systems. Microprocessors and Microsystems, 1994, 18(3): 141−150 [19] Kim H, Lee J, Lee K, Lee H. Design of dual-duplex system and evaluation of RAM. In: Proceedings of the 2001 IEEE Conference on Intelligent Transportation Systems, IEEE, 2001. 710−715 [20] 张振波. 计算机联锁控制系统的研究与发展趋势. 电子世界, 2014, (3): 22−23 doi: 10.3969/j.issn.1003-0522.2014.03.02220 Zhang Zhen-Bo. Research and development trend of computer-based interlocking system. Electronics World, 2014, (3): 22−23 doi: 10.3969/j.issn.1003-0522.2014.03.022 [21] 陈光武, 范多旺, 魏宗寿, 方亚飞. 基于二乘二取二的全电子计算机联锁系统. 中国铁道科学, 2010, 31(4): 138−14421 Chen Guang-Wu, Fan Duo-Wang, Wei Zong-Shou, Fang Ya-Fei. All electronic computer interlocking system based on double 2-vote-2. China railway science, 2010, 31(4): 138−144 [22] IEC 62278—2002. Railway application-specification and demonstration of reliability, availability, maintainability and safety. International Electrotechnical Commission, 2002. [23] 王贵国, 张荧驿, 谈立成, 李娜, 曹源. 轨道车辆RAMS工程技术体系研究. 北京交通大学学报, 2014, 38(2): 130−134, 140 doi: 10.11860/j.issn.1673-0291.2014.04.2323 Wang Gui-Guo, Zhang Ying-Yi, Tan Li-Cheng, Li Na, Cao Yuan. RAMS engineering technology system construction for railway vehicle. Journal of Beijing Jiaotong University, 2014, 38(2): 130−134, 140 doi: 10.11860/j.issn.1673-0291.2014.04.23 [24] 张友鹏, 李远远. 基于云模型和证据理论的铁路信号系统风险评估. 铁道学报, 2016, 38(1): 75−80 doi: 10.3969/j.issn.1001-8360.2016.01.01224 Zhang You-Peng, Li Yuan-Yuan. risk assessment of railway signal system based on cloud model and evidence theory. Journal of the China Railway Society, 2016, 38(1): 75−80 doi: 10.3969/j.issn.1001-8360.2016.01.012 [25] 李春洋, 陈循, 易晓山, 李华旺, 杨根庆. 基于Markov过程的k/n(G)系统共因失效分析. 系统工程与电子技术, 2009, 31(11): 2789−279225 Li Chun-Yang, Chen Xun, Yi Xiao-Shan, Li Hua-Wang, Yang Gen-Qing. Analysis of k/n(G) systems subject to common cause failures based on Markov process. Systems Engineering and Electronics, 2009, 31(11): 2789−2792 [26] 26 Wan Y, Huang H L, Das D, Pecht M. Thermal reliability prediction and analysis for high-density electronic systems based on the Markov process. Microelectronics Reliability, 2015, 56(5): 182−188 [27] 27 Pilch R. Extending the possibilities of quantitative determination of SIL — a procedure based on IEC 61508 and the Markov model with common cause failures. Quality and Reliability Engineering International, 2017, 33(2): 337−346 -

 下载:
下载:




计量
- 文章访问数: 3537
- HTML全文浏览量: 1023
- PDF下载量: 214
- 被引次数: 0
