

-
摘要:
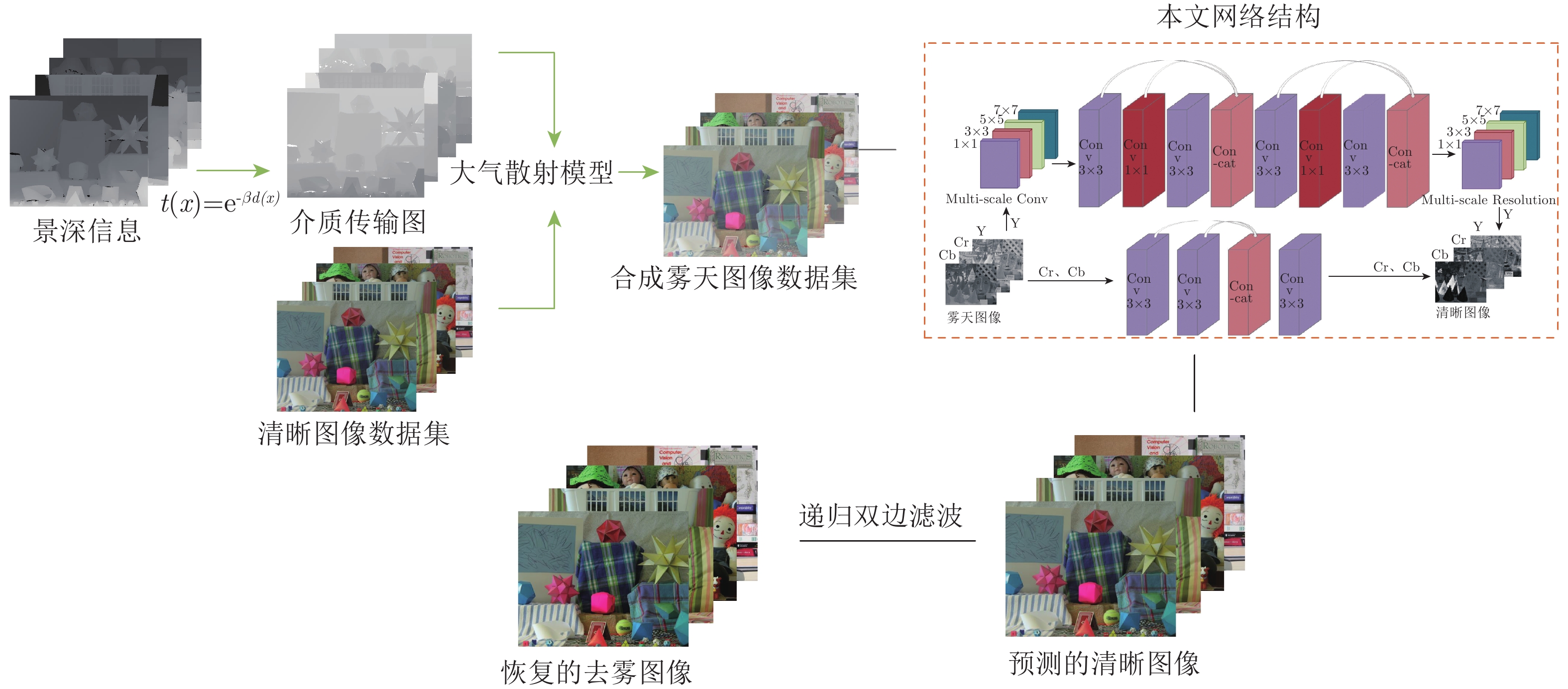
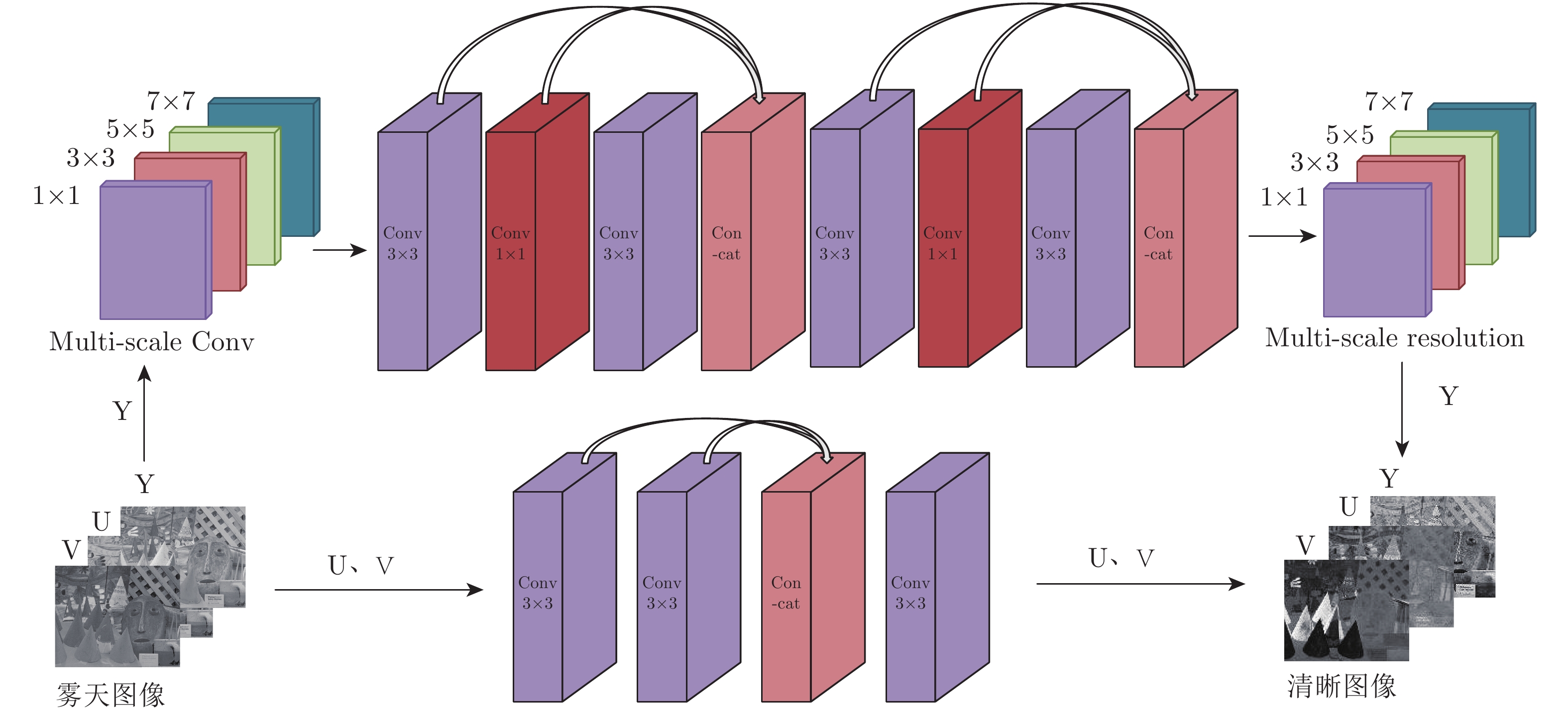
针对现有的单幅图像去雾问题, 提出了一种基于并联卷积神经网络的单幅图像去雾算法, 以端对端的方式实现图像去雾. 首先, 使用雾天RGB图像YUV变换的Y、U和V分量构建并联卷积神经网络, 自适应获得雾霾特征; 网络结构由两个子网络组成, 较深的网络预测清晰图像的亮度通道, 较浅的网络预测色度通道和饱和度通道. 最后, 采用递归双边滤波, 对去雾后的图像进行滤波, 可以得到更加清晰的无雾图像. 实验结果表明, 本文去雾算法无论是在合成雾天图像数据集还是自然雾天图像数据集上, 都具有良好的对比度与清晰度. 在主观评价和客观评价方面, 本文去雾算法都优于其他对比算法.
Abstract:Aiming at the problem that the existing single image dehazing algorithm, a single image dehazing algorithm based on multiple convolutional neural networks is proposed. Firstly, the Y, U and V components transformed by YUV of foggy day RGB images were used to construct a multiple convolutional neural network to obtain haze characteristics adaptively. The network structure is composed of two subnetworks, the deeper one predicts the brightness channel of the clear image, and the lighter one predicts the chromaticity channel and saturation channel. Finally, recursive bilateral filtering is adopted to filter the image after dehazing to obtain a clearer fog-free image. The experimental results show that this algorithm has good contrast and clarity in both synthetic and natural foggy image data sets, and is superior to other comparison algorithms in terms of subjective and objective evaluation.
-

图 4 不同算法对雾天图像Dolls的去雾结果
Fig. 4 Different algorithms to defog results of fog image Dolls
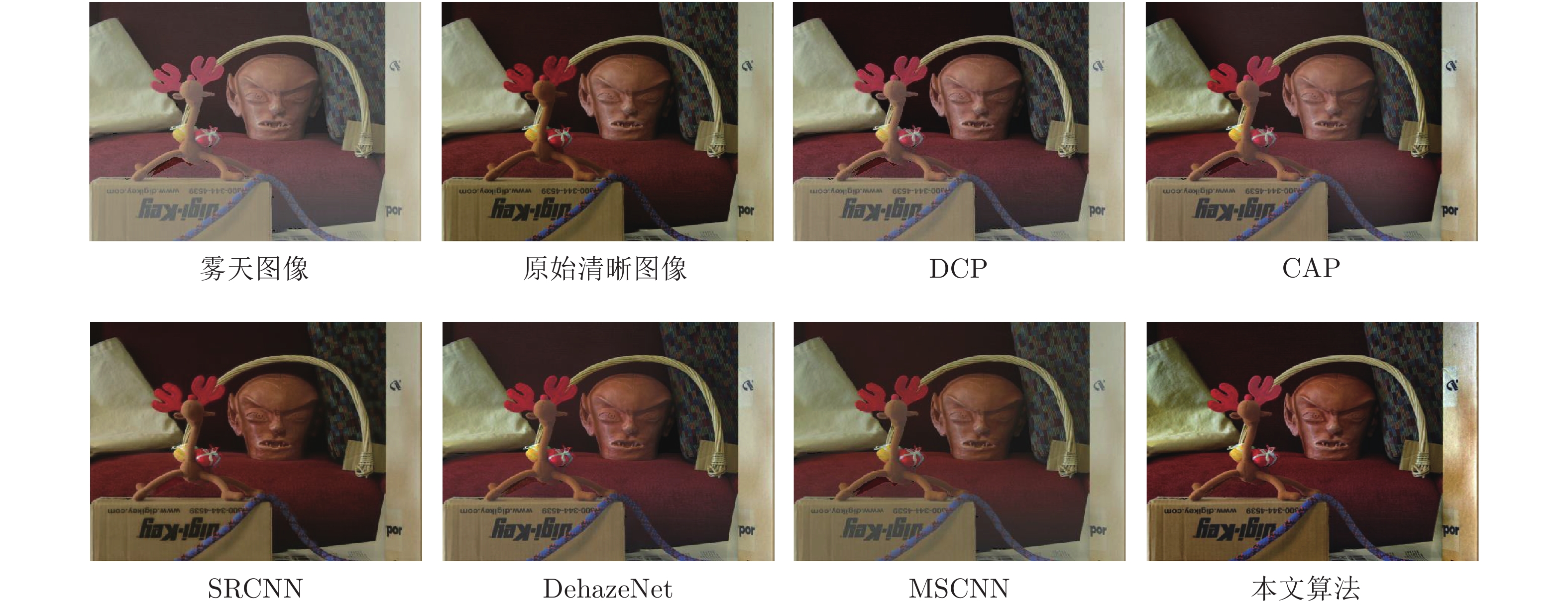
图 6 不同算法对雾天图像Reindeer的去雾结果
Fig. 6 Different algorithms to defog results of fog image Reindeer
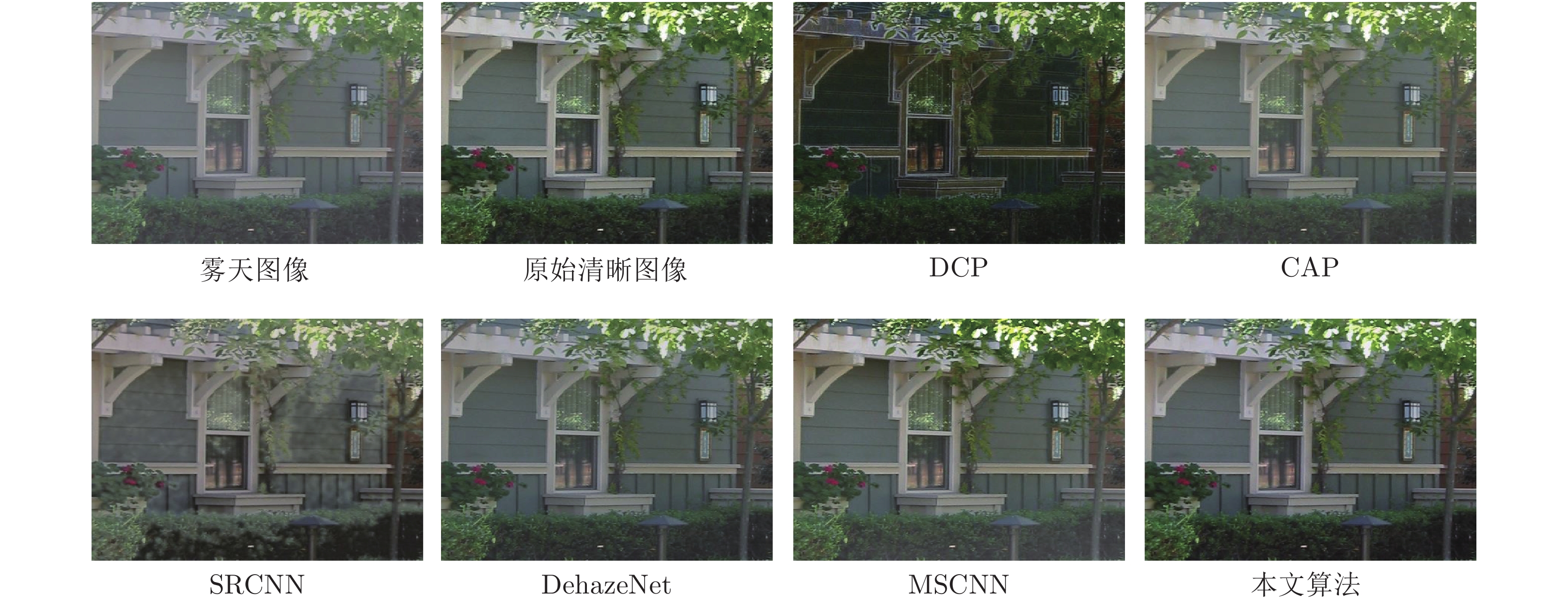
图 5 不同算法对雾天图像Trees的去雾结果
Fig. 5 Different algorithms to defog results of fog image Trees

图 7 不同算法的峰值信噪比和结构相似度的对比结果
Fig. 7 Comparison results of PSNR and SSIM of different algorithms
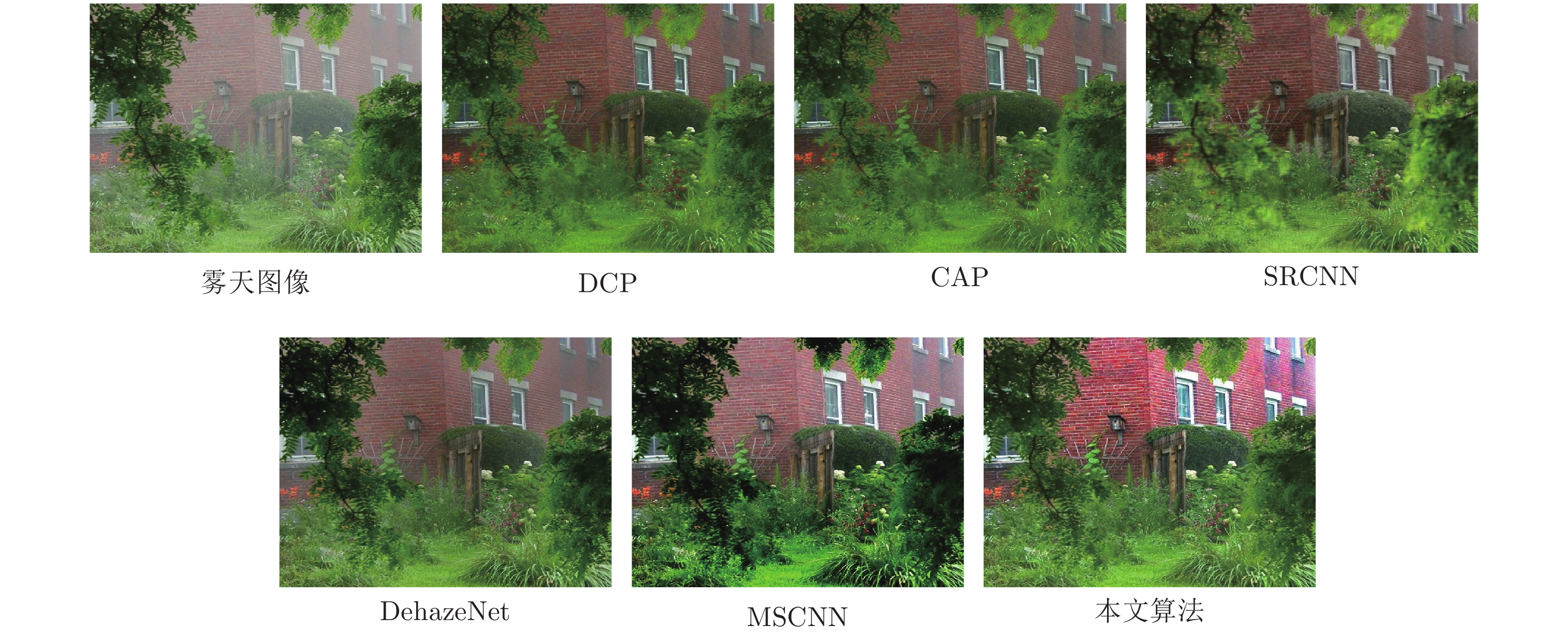
图 8 自然雾天图像House的去雾结果对比
Fig. 8 Comparison of defogging results of natural foggy images House
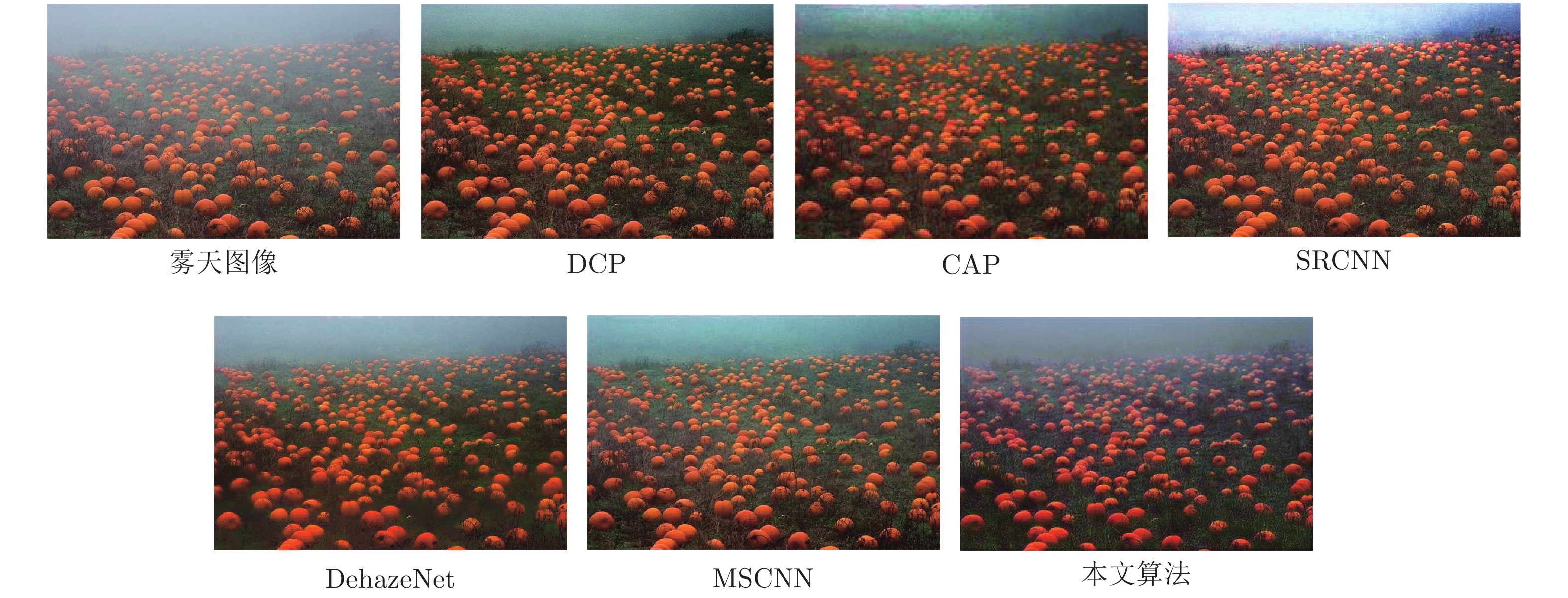
图 9 自然雾天图像Pumpkin的去雾结果对比
Fig. 9 Comparison of defogging results of natural foggy images Pumpkin

图 10 不同算法的对比度和平均梯度的对比结果
Fig. 10 Comparison results of Contrast and average gradient of different algorithms
表 1 多尺度卷积模型
Table 1 Multi-scale convolution model
卷积核尺寸 补零 步长 1×1×16 0 1 3×3×16 1 1 5×5×16 2 1 7×7×16 3 1  下载: 导出CSV
下载: 导出CSV
表 2 30幅合成雾天图像的RMSE, 色调还原度, 平均梯度, 信息熵, PSNR, SSIM的平均结果
Table 2 The average results of RMSE, tone reduction, average gradient, information entropy, PSNR, SSIM for the 30 synthetic foggy images
评价指标 雾天图像 DCP CAP SRCNN DehazeNet MSCNN 本文算法 RMSE $ \downarrow $ 0.1534 0.0289 0.0331 0.0179 0.0176 0.0241 0.0160 色调还原度 $ \uparrow $ 0.5373 0.7523 0.6554 0.8900 0.8925 0.8064 0.9503 平均梯度 $ \uparrow $ 5.1909 6.0140 6.0101 6.2006 6.0335 7.1038 7.2011 信息熵 $ \uparrow $ 12.5004 14.5855 14.5920 16.6002 16.5660 16.4850 16.6522 PSNR $ \uparrow $ 15.3102 19.8640 23.2021 25.2305 25.7017 25.6899 25.9057 SSIM $ \uparrow $ 0.5883 0.8512 0.8666 0.9374 0.9461 0.8657 0.9603
下载: 导出CSV
表 3 图像House采用不同算法去雾后评价指标结果
Table 3 Evaluation indicators results by different defogging algorithms for image House
评价指标 雾天图像 DCP CAP SRCNN DehazeNet MSCNN 本文算法 均值 $ \uparrow $ 85.2630 85.5620 86.1508 90.4007 89.4709 83.4437 93.6325 标准差 $ \uparrow $ 32.5943 23.0221 28.5681 33.9261 37.9512 56.1652 59.3654 信息熵 $ \uparrow $ 15.2220 16.4238 15.9294 16.8104 15.8738 14.1624 16.8542
下载: 导出CSV
表 4 图像Pumpkin采用不同算法去雾后评价指标结果
Table 4 Evaluation indicators results by different defogging algorithms for image Pumpkin
评价指标 雾天图像 DCP CAP SRCNN DehazeNet MSCNN 本文算法 均值 $ \uparrow $ 79.0321 79.2335 88.8262 77.8436 97.1924 94.2468 97.9533 标准差 $ \uparrow $ 45.9969 47.4479 44.8145 44.8020 50.4282 43.1658 59.6355 信息熵 $ \uparrow $ 14.8954 14.3255 15.4778 15.9992 15.9761 15.9783 16.7523
下载: 导出CSV
表 5 不同算法的运行时间对比结果 (s)
Table 5 The run time comparison results of different algorithms (s)
图像 像素尺寸 DCP CAP SRCNN DehazeNet MSCNN 本文算法 House 345×450 1.026985 1.083050 1.420000 0.712700 2.300000 0.386680 Pumpkin 600×450 1.040880 4.097866 2.413527 0.643354 2.632809 0.401389
下载: 导出CSV
-
[1] McCann J J. Retinex at 40. Journal Electronic Imaging, 2004, 13(1): 6−7 doi: 10.1117/1.1645250 [2] Cooper T J, Baqai F A. Analysis and extensions of the Frankle-McCann retinex algorithm. Journal of Electronic Imaging, 2004, 13(1): 85−92 doi: 10.1117/1.1636182 [3] Land E H, McCann J J. Lightness and retinex theory. Journal of the Optical Society of America, 1971, 61(1): 1−11 doi: 10.1364/JOSA.61.000001 [4] Land E H. An alternative technique for the computation of the designator in the retinex theory of color vision. Proceedings of the National Academy of Sciences of the United States of America, 1986, 83(10): 3078−3080 doi: 10.1073/pnas.83.10.3078 [5] Frankle J A, McCann J J. Method and Apparatus for Lightness Imaging: USA. Patent 4384336, May 1983. [6] He K M, Sun J, Tang X O. Single image haze removal using dark channel prior. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(12): 2341−2353 [7] Zhu Q S, Mai J M, Shao L. A fast single image haze removal algorithm using color attenuation prior. IEEE Transactions on Image Processing, 2015, 24(11): 3522−3533 doi: 10.1109/TIP.2015.2446191 [8] 周全, 王磊, 周亮, 郑宝玉. 多尺度上下文的图像标注算法. 自动化学报, 2014, 40(12): 2944−2949Zhou Quan, Wang Lei, Zhou Liang, Zheng Bao-Yu. Multi-scale contextual image labeling. Acta Automatica Sinica, 2014, 40(12): 2944−2949 [9] 李新德, 杨伟东, Dezert Jean. 一种飞机图像目标多特征信息融合识别方法. 自动化学报, 2012, 38(8): 1298−1307Li Xin-De, Yang Wei-Dong, Dezert Jean. An airplane image target′s multi-feature fusion recognition method. Acta Automatica Sinica, 2012, 38(8): 1298−1307 [10] 胡长胜, 詹曙, 吴从中. 基于深度特征学习的图像超分辨率重建. 自动化学报, 2017, 43(5): 814−821Hu Chang-Sheng, Zhan Shu, Wu Cong-Zhong. Image super-resolution based on deep learning features. Acta Automatica Sinica, 2017, 43(5): 814−821 [11] Cai B L, Xu X M, Jia K, Qing C M, Tao D C. DehazeNet: An end-to-end system for single image haze removal. IEEE Transactions on Image Processing, 2016, 25(15): 5187−5198 [12] Ren W Q, Liu S, Zhang H, Pan J S, Cao X C, Yang M H. Single image dehazing via multi-scale convolutional neural networks. In: Proceedings of the 2016 Conference on Computer Vision–ECCV2016, 2016. 154−169 [13] Li C Y, Guo J C, Porikli F, Fu H Z, Pan Y W. A cascaded convolutional neural network for single image dehazing. IEEE Access, 2018, 6: 24877−24887 [14] Narasimhan S G, Nayar S K. Contrast restoration of weather degraded images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(6): 713−724 [15] 徐岩, 孙美双. 基于多特征融合的卷积神经网络图像去雾算法. 激光与光电子学进展, 2018, 55(3): 260−269Xu Yan, Sun Mei-Shuang. Convolution neural network image defogging based on multi-feature fusion. Laser and Optoelectronics Progress, 2018, 55(3): 260−269 [16] Dong C, Chen C L, He K M, Tang X O. Image super-resolution using deep convolutional networks. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(2): 295−307 doi: 10.1109/TPAMI.2015.2439281 [17] 李大鹏, 禹晶, 肖创柏. 图像去雾的无参考客观质量评测方法. 中国图象图形学报, 2011, 16(9): 1753−1757 doi: 10.11834/jig.110024Li Da-Peng, Yu Jing, Xiao Chuang-Bai. No-reference quality assessment method for defogged images. Journal of Image and Graphics, 2011, 16(9): 1753−1757 doi: 10.11834/jig.110024 -

 下载:
下载:


计量
- 文章访问数: 1727
- HTML全文浏览量: 800
- PDF下载量: 374
- 被引次数: 0
