

Research on Dynamic Multiobjective Intelligent Optimal Control for Municipal Wastewater Treatment Process
-
摘要:
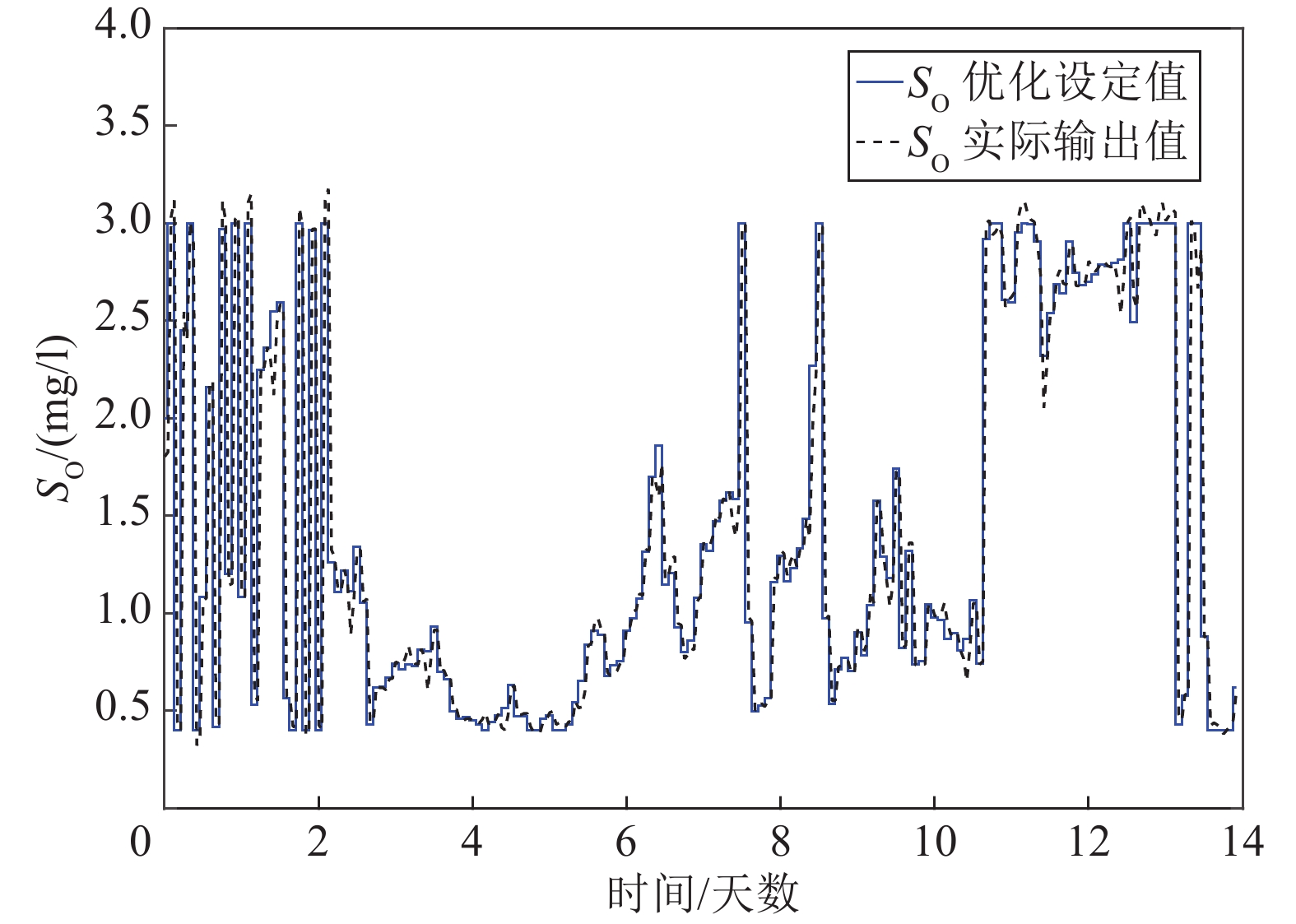
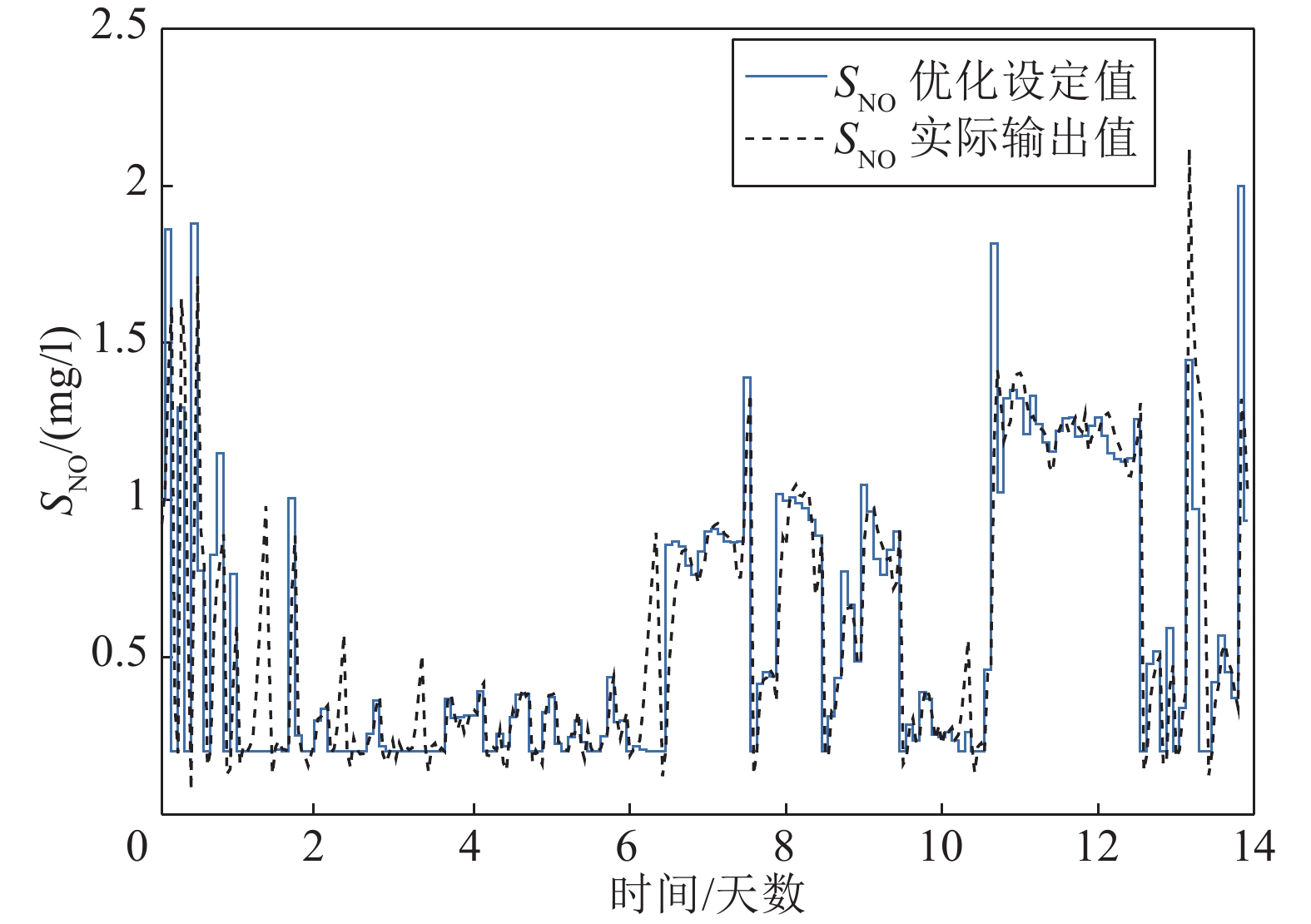
城市污水处理过程(Municipal wastewater treatment process, MWWTP)是一个典型的复杂流程工业过程, 其优化运行涉及到多个动态性能指标. 为了实现城市污水处理运行过程的优化控制, 本文提出了一种城市污水处理过程动态多目标智能优化控制方法(Dynamic multiobjective intelligent optimal control, DMIOC). 首先, 建立了一种基于自适应核函数的动态性能指标模型, 实现了城市污水处理关键性能指标的准确描述; 其次, 设计了一种基于自适应飞行参数调整机制的动态多目标粒子群优化算法(Dynamic multiobjective particle swarm optimization, DMOPSO), 可有效平衡粒子的多样性和收敛性, 完成了溶解氧和硝态氮优化设定值的实时获取; 最后, 利用多回路PID控制方法对溶解氧和硝态氮优化设定值进行控制, 实现了城市污水处理过程安全稳定运行. 将提出的DMIOC应用于城市污水处理基准仿真平台, 实验结果显示: DMIOC 能够提高溶解氧和硝态氮的控制效果, 实现城市污水处理过程出水水质达标, 并降低运行成本.
-
关键词:
- 城市污水处理过程 /
- 动态多目标智能优化控制 /
- 动态多目标粒子群优化 /
- 优化设定值
Abstract:Municipal wastewater treatment process (MWWTP) is a typical complex industrial process, where multiple dynamic performance indices are contained in the optimal operational process. To realize the optimal operational control of MWWTP, a dynamic multiobjective intelligent optimal control (DMIOC) strategy is proposed in this paper. First, dynamic performance index model based on adaptive kernel function was established. Then the dynamic characteristics of performance indices could be accurately captured. Second, a dynamic multiobjective particle swarm optimization (DMOPSO) algorithm, based on an adaptive flight parameter adjustment mechanism, was designed. It can efficiently balance the diversity and convergence of the particles. Then the real-time optimal set-points of the control variables dissolved oxygen and nitrate nitrogen could be obtained. Third, a multi-loop PID control strategy was utilized to realize the control of the optimal set-points of dissolved oxygen and nitrate nitrogen. The proposed DMIOC strategy was tested in the benchmark simulation model to evaluate its effectiveness. The results demonstrate that the proposed DMIOC strategy can realize the dynamic optimal control of the control variables dissolved oxygen and nitrate nitrogen, guarantee the effluent qualities in the limits and reduce the operation cost.
-

图 1 城市污水处理过程动态多目标智能优化控制架构
Fig. 1 The scheme of DMIOC for municipal wastewater treatment process
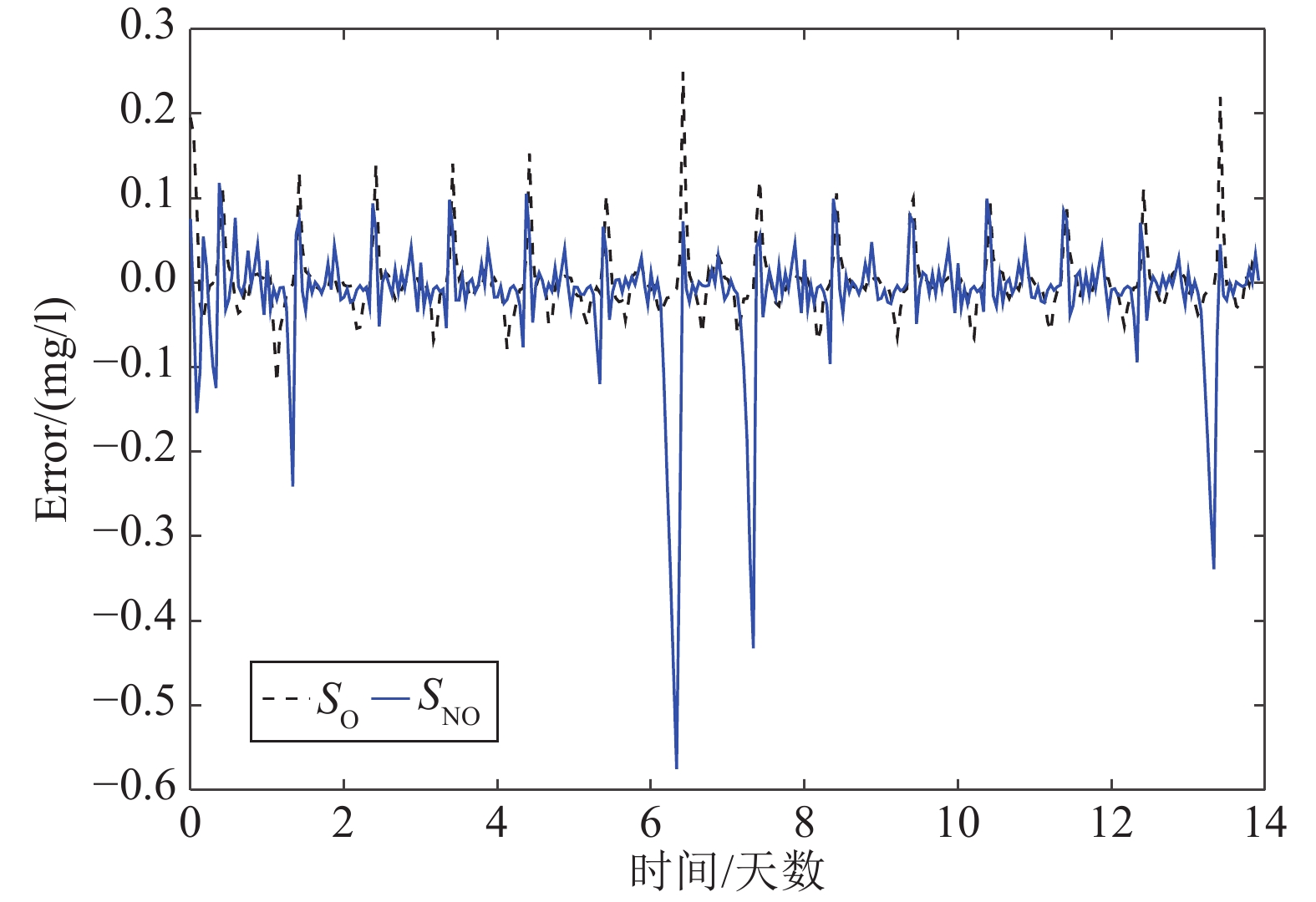
图 8
$S_{\rm{O}}$ 和$S_{{\rm{NO}}}$ 的误差值Fig. 8 Control errors of
$S_{\rm{O}}$ and$S_{{\rm{NO}}}$ 表 1 不同优化算法的性能比较
Table 1 The approximation effect of different optimization algorithms
函数 指标 DMOPSO Pccs−AMOPSO Cluster−MOPSO NSGANSGA ZDT3 GD 3.982E−03 3.323E−03 1.047E−02 5.834E−03 std 3.623E−03 9.951E−05 7.052E−02 2.020E−04 SP 7.025E−02 7.159E−02 7.784E−02 9.222E−02 std 7.171E−03 4.054E−03 4.362E−02 8.415E−03 ZDT4 GD 4.147E−03 7.971E−03 3.989E+00 1.655E−02 std 2.980E−04 1.470E−03 2.616E+00 3.174E−02 SP 2.645E−02 2.881E−02 7.692E−02 3.838E−02 std 4.998E−04 5.132E−04 1.931E−02 3.837E−03 DTLZ2 GD 6.595E−02 6.143E−02 1.265E−01 1.059E−01 std 7.241E−04 1.898E−03 1.683E−02 8.383E−03 SP 2.399E−01 3.411E−01 5.762E−01 4.162E−01 std 9.732E−03 1.242E−02 4.472E−02 3.655E−02 DTLZ7 GD 1.215E−02 4.277E−02 4.022E−02 1.799E−02 std 8.600E−04 9.506E−04 2.068E−03 1.294E−03 SP 3.758E−01 3.988E−01 3.902E−01 4.191E−01 std 7.593E−03 8.417E−03 1.293E−02 7.961E−03  下载: 导出CSV
下载: 导出CSV
表 2 不同优化算法的计算时间比较 (s)
Table 2 Calculation time comparison of different optimization methods (s)
函数 DMOPSO PccsAMOPSO ClusterMOPSO NSGA ZDT3 134 138 141 139 ZDT4 140 144 142 148 DTLZ2 249 280 230 287 DTLZ7 260 287 250 301
下载: 导出CSV
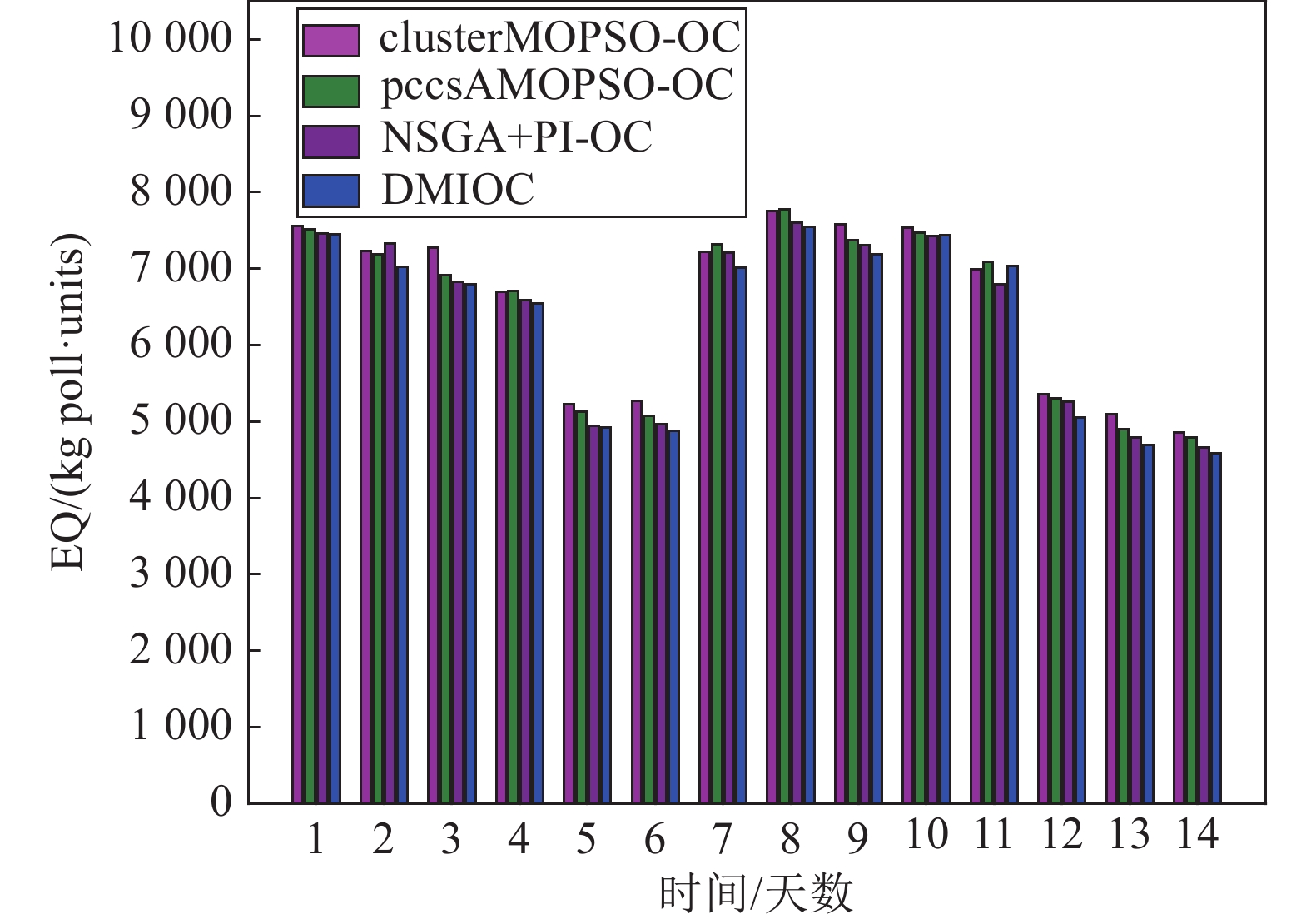
表 3 不同优化控制方法优化性能比较
Table 3 Comparison of optimization performance of different optimal control methods
方法 PE (kW·h) AE (kW·h) EQ (kg poll) DMIOC 249 3630 6616 clusterMOPSO-OC 254 3691 7291 pccsAMOPSO-OC 255 3687 7220 NSGA+PI-OC 243 3694 7214
下载: 导出CSV
表 4 不同优化控制方法控制性能比较
Table 4 Comparison of control performance of different optimal control methods
方法 IAE (mg/L) SNH (mg/L) SS (mg/L) DMIOC 0.097 3.08 12.15 clusterMOPSO-OC 0.122 3.23 12.45 pccsAMOPSO-OC 0.012 3.31 13.25 NSGA+PI-OC 0.100 3.12 12.52
下载: 导出CSV
-
[1] 韩红桂, 伍小龙, 张璐, 乔俊飞. 城市污水处理过程异常工况识别和抑制研究. 自动化学报, 2018, 44(11): 1971−1984Han Hong-Gui, Wu Xiao-Long, Zhang Lu, Qiao Jun-Fei. Identiflcation and suppression of abnormal conditions in municipal wastewater treatment process. Acta Automatica Sinica, 2018, 44(11): 1971−1984 [2] Han H G, Wu X L, Qiao J F. A self-organizing sliding-mode controller for wastewater treatment processes. IEEE Transactions on Control Systems Technology, 2019, 27(4): 1480−1491 doi: 10.1109/TCST.87 [3] 栗三一, 乔俊飞, 李文静. 污水处理决策优化控制. 自动化学报, 2018, 44(12): 2198−2209Li San-Yi, Qiao Jun-Fei, Li Wen-Jing. Advanced decision and optimization control for wastewater treatment plants. Acta Automatica Sinica, 2018, 44(12): 2198−2209 [4] Han H G, Qiao J F. Nonlinear model-predictive control for industrial processes: An application to wastewater treatment process. IEEE Transactions on Industrial Electronics, 2013, 61(4): 1970−1982 [5] Castelletviciano L, Torregrossa D, Hernandezsancho F. The relevance of the design characteristics to the optimal operation of wastewater treatment plants: Energy cost assessment. Journal of Environmental Management, 2018, 222: 275−283 [6] 乔俊飞, 韩改堂, 周红标. 基于知识的污水生化处理过程智能优化方法. 自动化学报, 2017, 43(6): 1038−1046Qiao Jun-Fei, Han Gai-Tang, Zhou Hong-Biao. Knowledge-based intelligent optimal control for wastewater biochemical treatment process. Acta Automatica Sinica, 2017, 43(6): 1038−1046 [7] 丁进良, 杨翠娥, 陈远东, 柴天佑. 复杂工业过程智能优化决策系统的现状与展望. 自动化学报, 2018, 44(11): 1931−1943Ding Jin-Liang, Yang Cui-E, Chen Yuan-Dong, Chai Tian-You. Research progress and prospects of intelligent optimization decision making in complex industrial process. Acta Automatica Sinica, 2018, 44(11): 1931−1943 [8] 辛斌, 陈杰, 彭志红. 智能优化控制: 概述与展望. 自动化学报, 2013, 39(11): 1831−1848Xin Bin, Chen Jie, Peng Zhi-Hong. Intelligent optimized control: overview and prospect. Acta Automatica Sinica, 2013, 39(11): 1831−1848 [9] Jeong E, Kim H W, Nam J Y, Shin H S. Enhancement of bioenergy production and effluent quality by integrating optimized acidification with submerged anaerobic membrane bioreactor. Bioresource Technology, 2010, 101(1): S7−S12 doi: 10.1016/j.biortech.2009.04.064 [10] Xie W M, Zhang R, Li W W, Ni B J, Fang F, Sheng G P, Yu H Q, Song J, Le D Z, Bi X J, Liu C Q, Yang M. Simulation and optimization of a full-scale carrousel oxidation ditch plant for municipal wastewater treatment. Biochemical Engineering Journal, 2011, 56(1−2): 9−16 doi: 10.1016/j.bej.2011.04.010 [11] Alsina F X, Arnell M, Amerlinck Y, Corominas L, Gernaey K V, Guo L, Lindblom E, Nopens I, Porro J, Shaw A, Snip L, Vanrolleghem P A, Jeppsson U. Balancing effluent quality, economic cost and greenhouse gas emissions during the evaluation of (plant-wide) control/operational strategies in WWTPs. Science of the Total Environment, 2014, 466−467(1): 616−624 [12] Yang Y, Yang J K, Zuo J L, Li Y, He S, Yang X, Zhang K. Study on two operating conditions of a full-scale oxidation ditch for optimization of energy consumption and effluent quality by using CFD model. Water Research, 2011, 45(11): 3439−3452 doi: 10.1016/j.watres.2011.04.007 [13] Santin I, Pedret C, Vilanova R. Applying variable dissolved oxygen set point in a two level hierarchical control structure to a wastewater treatment process. Journal of Process Control, 2015, 28: 40−55 doi: 10.1016/j.jprocont.2015.02.005 [14] Hakanen J, Sahlstedt K, Miettinen K. Wastewater treatment plant design and operation under multiple conflicting objective functions. Environmental Modelling and Software, 2013, 46(7): 240−249 [15] Asadi A, Verma A, Yang K. Wastewater treatment aeration process optimization: A data mining approach. Journal of Environmental Management, 2016, 203(2): 630−639 [16] Durrenmatt D J. Data mining and data-driven modeling approaches to support wastewater treatment plant operation. Environmental Modelling and Software, 2011, 30(5): 47−56 [17] 丛秋梅, 柴天佑, 余文. 污水处理过程的递阶神经网络建模. 控制理论与应用, 2009, 26(1): 8−14Cong Qiu-Mei, Chai Tian-You, Yu Wen. Modeling wastewater treatment plant via hierarchical neural networks. Control Theory and Applications, 2009, 26(1): 8−14 [18] Qiao J F, Zhang W. Dynamic multi-objective optimization control for wastewater treatment process. Neural Computing and Applications, 2018, 29(11): 1261−1271 [19] Hreiz R, Latifi M A, Roche N. Optimal design and operation of activated sludge processes: state-of-the-art. Chemical Engineering Journal, 2015, 281: 900−920 doi: 10.1016/j.cej.2015.06.125 [20] Hreiz R, Roche N, Benyahia B, Latifi M A. Multi-objective optimal control of small-size wastewater treatment plants. Chemical Engineering Research and Design, 2015, 102: 345−353 [21] Ozturk M C, Serrat F M, Teymour F. Optimization of aeration profiles in the activated sludge process. Chemical Engineering Science, 2016, 139: 1−14 doi: 10.1016/j.ces.2015.09.007 [22] Vega P, Revollar S, Francisco M, Martin J M. Integration of set point optimization techniques into nonlinear MPC for improving the operation of WWTPs. Computers and Chemical Engineering, 2014, 68(8): 78−95 [23] Schluter M, Egea J A, Antelo L T, Alonso A A, Banga J R. An extended ant colony optimization algorithm for integrated process and control system design. Industrial and Engineering Chemistry Research, 2009, 48(14): 6723−6738 [24] Cai X, Yang Z, Fan Z, Zhang Q F. Decomposition- based-sorting and angle-based-selection for evolutionary multiobjective and many-objective optimization. IEEE Transactions on Cybernetics, 2017, 47(9): 2824−2837 doi: 10.1109/TCYB.2016.2586191 [25] Yetilmezsoy K. Integration of kinetic modeling and desirability function approach for multi-objective optimization of UASB reactor treating poultry manure wastewater. Bioresource Technology, 2012, 118: 89−101 doi: 10.1016/j.biortech.2012.05.088 [26] Guerrero J, Guisasola A, Comas J, Roda I R, Baeza J A. Multi-criteria selection of optimum WWTP control setpoints based on microbiology-related failures, effluent quality and operating costs. Chemical Engineering Journal, 2012, 188(8): 23−29 [27] Beraud B, Steyer J P, Lemoine C, Latrille E, Manic G, Printemps-Vacquier C. Towards a global multi objective optimization of wastewater treatment plant based on modeling and genetic algorithms. Water Science and Technology, 2007, 56(9): 109−116 [28] Yen G G, Leong W F. Dynamic multiple swarms in multiobjective particle swarm optimization. IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans, 2009, 39(4): 890−911 doi: 10.1109/TSMCA.2009.2013915 [29] Sweetapple C, Fu G, Butler D. Multi-objective optimisation of wastewater treatment plant control to reduce greenhouse gas emissions. Water Research, 2014, 55(55C): 52−62 [30] Qiao J F, Hou Y, Zhang L, Han H G. Adaptive fuzzy neural network control of wastewater treatment process with multiobjective operation. Neurocomputing, 2018, 67: 467−478 [31] Hu W, Yen G G. Adaptive multiobjective particle swarm optimization based on parallel cell coordinate system. IEEE Transactions on Evolutionary Computation, 2015, 19(1): 1−18 doi: 10.1109/TEVC.2013.2296151 [32] Chen W L, Yao C H, Lu X W. Optimal design activated sludge process by means of multi-objective optimization: case study in benchmark simulation model 1 (BSM1). Water Science and Technology, 2014, 69(10): 2052−2058 [33] Chakraborty P, Das S, Roy G G, Abraham A. On convergence of the multi-objective particle swarm optimizers. Information Sciences, 2011, 181(8): 1411−1425 doi: 10.1016/j.ins.2010.11.036 -

 下载:
下载:





计量
- 文章访问数: 1981
- HTML全文浏览量: 604
- PDF下载量: 700
- 被引次数: 0
