

-
摘要:
本文针对由雷达与红外组成的分布式传感器网络, 研究基于一致性的分布式变结构多模型方法(Distributed variable structure multiple model, DVSMM). 首先,使用无迹信息滤波(Unscented information filter, UIF)解决系统非线性的问题, 然后,将变结构交互式多模型(Variable structure interacting multiple model, VSMM)方法进行改进, 提出一类可应用于分布式状态估计的分布式变结构多模型DVSMM方法. 仿真实验结果验证了该方法的有效性.
-
关键词:
- 机动目标跟踪 /
- 分布式状态估计 /
- 分布式交互式多模型方法
Abstract:This paper proposed a distributed variable structure multiple model (DVSMM) algorithm based on consensus theory in a distributed radar and infrared sensor system. Firstly, the unscented information filter (UIF) for nonlinear system is introduced. Secondly, according to improving the variable structure interacting multiple model (VSMM), the algorithm about consensus-based distributed variable structure multiple model is proposed to be applied in distributed sensor networks. The simulation results reveal that the DVSMM is effective.
-
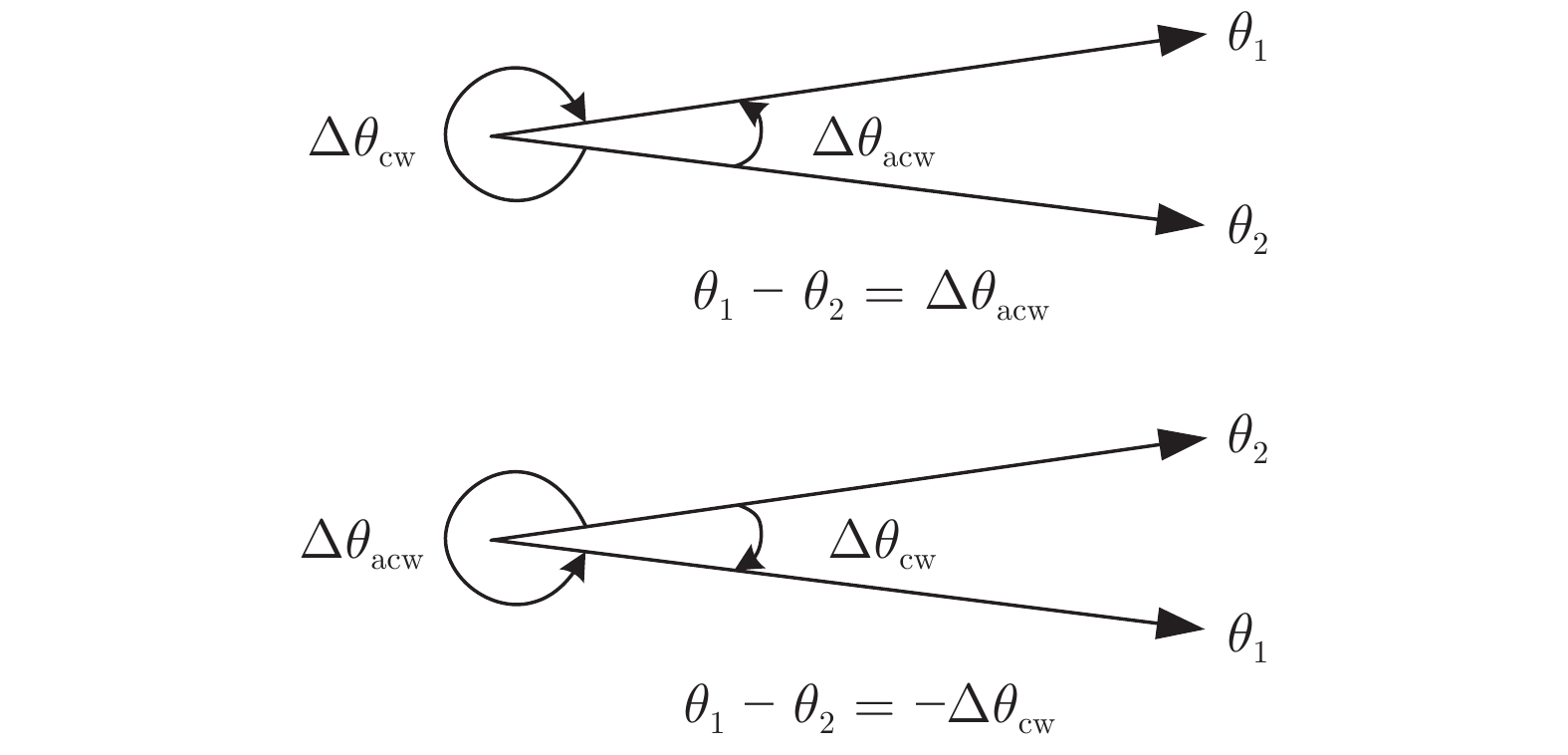
图 3
$ {\theta }_{1}-{\theta }_{2} $ 的定义Fig. 3 Definition of
$ {\theta }_{1}-{\theta }_{2} $ 表 1 目标运动模式的变化
Table 1 Target mode switching
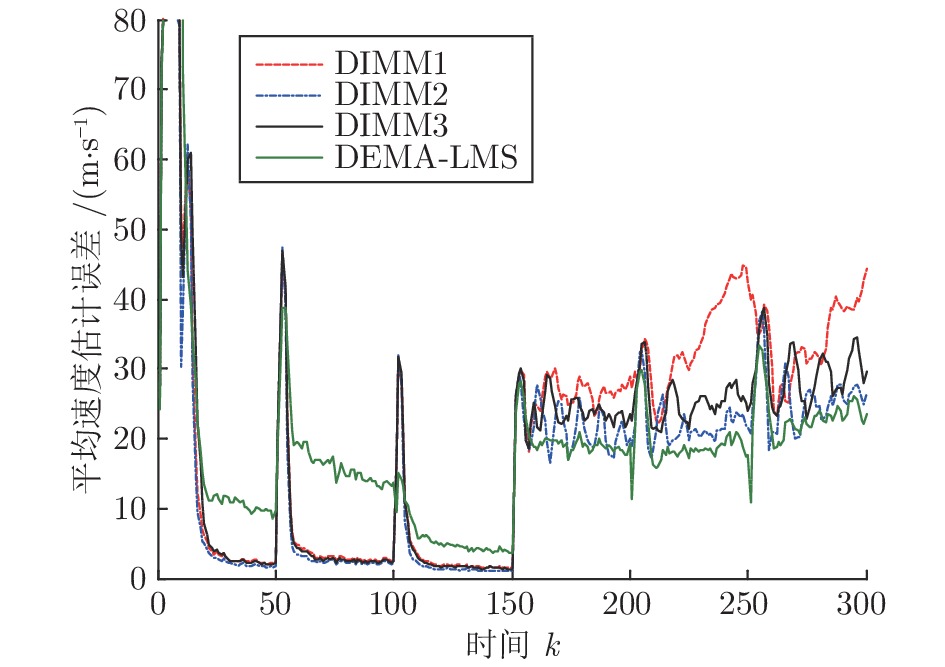
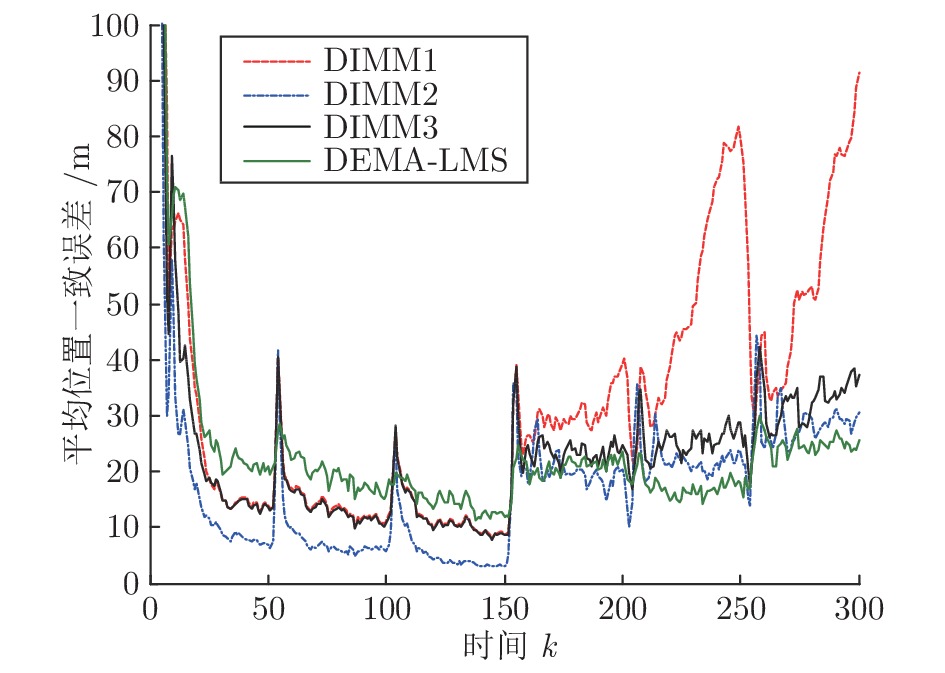
时间k 1 ~ 50 50 ~ 100 100 ~ 150 150 ~ 200 200 ~ 250 250 ~ 300 加速度${u_k}$ $ {\left[\rm{0}, \rm{0}\right]}^{\rm{T}}$ $ {\left[\rm{0}, \rm{-20}\right]}^{\rm{T}}$ $ {\left[\rm{0}, \rm{0}\right]}^{\rm{T}}$ $ {\left[\rm{10}, \rm{10}\right]}^{\rm{T}}$ $ {\left[\rm{-10}, \rm{-10}\right]}^{\rm{T}}$ $ {\left[\rm{10}, \rm{10}\right]}^{\rm{T}}$  下载: 导出CSV
下载: 导出CSV
-
[1] Blom H A P. An efficient filter for abruptly changing systems. In: Proceedings of the 23rd IEEE Conference on Decision and Control, Las Vegas, USA, 1984. 656−658 [2] Li X R. Model-set sequence-conditioned estimation for variable-structure MM estimation. In: Proceedings of Signal and Data Processing of Small Targets, Orlando, United States, 1998. 546−558 [3] Li X R. Multiple-model estimation with variable structure. II. Model-set adaptation. IEEE Transactions on Automatic Control, 2000, 45(11): 2047−2060 doi: 10.1109/9.887626 [4] Li X R, Zhang Y M. Multiple-model estimation with variable structure. V. Likely-model set algorithm. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 448−466 doi: 10.1109/7.845222 [5] Li X R, Jilkov V P, Ru J. Multiple-model estimation with variable structure - Part VI: Expected-mode augmentation. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(3): 853−867 doi: 10.1109/TAES.2005.1541435 [6] Xiong N, Svensson P. Multi-sensor management for information fusion: issues and approaches. Information fusion, 2002, 3(2): 163−186 doi: 10.1016/S1566-2535(02)00055-6 [7] Carli R, Chiuso A, Schenato L. Distributed Kalman filtering based on consensus strategies. IEEE Journal on Selected Areas In Communications, 2008, 26(4): 622−633 doi: 10.1109/JSAC.2008.080505 [8] Olfati-Saber R. Distributed Kalman filtering for sensor networks. In: Proceedings of 46th IEEE Conference on Decision and Control, New Orleans, USA, 2007. 5492−5498 [9] Olfati-Saber R. Distributed Kalman filter with embedded consensus filters. In: Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 2005. 8179−8184 [10] Casbeer D W, Beard R. Distributed information filtering using consensus filters. In: Proceedings of American Control Conference, Saint Louis, USA, 2009. 1882−1887 [11] Casbeer D W, Beard R. Multi-static radar target tracking using information consensus filters. In: Proceedings of AIAA Guidance, Navigation, and Control Conference, Chicago, USA, 2009. 6223−6232 [12] Stanković S S, Stanković M S, Stipanović D M. Consensus based overlapping decentralized estimation with missing observations and communication faults. Automatica, 2009, 45(6): 1397−1406 doi: 10.1016/j.automatica.2009.02.014 [13] Lin P, Jia Y, Li L. Distributed robust H∞ consensus control in directed networks of agents with time-delay. Systems & Control Letters, 2008, 57(8): 643−653 [14] Spanos D P, Olfati-Saber R, Murray R M. Dynamic consensus on mobile networks. In: Proceedings of International Federation of Automatic Control, Prague, Czech Republic, 2005. 1−6 [15] Xi Feng, Liu Zhong. Distributed Kalman filter with information matrix weighted consensus strategies. Information and Control, 2010, 39(2): 194−199 [16] Shi L, Johansson K H, Murray R M. Change sensor topology when needed: How to efficiently use system resources in control and estimation over wireless networks. In: Proceedings of 46th IEEE Conference on Decision and Control, New Orleans, USA, 2007. 5478−5485 [17] Yu W, Chen G, Wang Z. Distributed consensus filtering in sensor networks. IEEE Transactions on Systems, Man, and Cyberneticsb - Part B: Cybernetics, 2009, 39(6): 1568−1577 doi: 10.1109/TSMCB.2009.2021254 [18] Li W, Jia Y. Consensus-based distributed multiple model UKF for jump Markov nonlinear systems. IEEE Transactions on Automatic Control, 2011, 57(1): 227−233 [19] Ding Z, Liu Y, Liu J. Adaptive interacting multiple model algorithm based on information-weighted consensus for maneuvering target tracking. Sensors, 2018, 18(7): 2012−2035 doi: 10.3390/s18072012 [20] Fantacci C, Battistelli G, Chisci L. Multiple-model algorithms for distributed tracking of a maneuvering target. In: Proceedings of 15th International Conference on Information Fusion, Singapore, Singapore, 2012. 1028−1035 [21] Lee D J. Nonlinear estimation and multiple sensor fusion using unscented information filtering. IEEE Signal Processing Letters, 2008, 15: 861−864 doi: 10.1109/LSP.2008.2005447 [22] Julier S J, Uhlmann J K, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Transactions on Automatic Control, 2000, 45(3): 477−482 doi: 10.1109/9.847726 [23] Wan E A, Van D M R. The unscented Kalman filter for nonlinear estimation. In: Proceedings of Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, Canada, 2000. 153−158 [24] Li X R, Jilkov V P. Survey of maneuvering target tracking. Part V. Multiple-model methods. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1255−1321 doi: 10.1109/TAES.2005.1561886 [25] Xiao L, Boyd S, Lall S. A scheme for robust distributed sensor fusion based on average consensus. In: Proceedings of International Symposium on Information Processing in Sensor Networks, Boise, USA, 2005. 63−70 -

 下载:
下载:




计量
- 文章访问数: 1154
- HTML全文浏览量: 636
- PDF下载量: 242
- 被引次数: 0
