

-
摘要: 针对当前交通拥堵现状,考虑车辆间通信受限或故障条件下,基于现有路侧设施以及邻车相对位置、相对速度提出一种车队控制的通用可变时距策略(Variable time headway policy,VTHP).通过选择可变行驶时间距离参数,建立形式统一的车间距策略及其误差模型,并根据单车、队列以及交通流稳定性分析,综合设计控制器,同时将分析方法推广到固定间距策略(Constant spacing policy,CSP)与固定时距策略(Constant time headway policy,CTHP)中.依据上述稳定性结果给出一种物理意义明确的可变行驶时距计算方法,并得到该时距的变化界限,从而更准确快速地控制车距安全.仿真结果表明,本文提出的通用可变时距策略及相关计算方法,不但可实现车队与交通流的稳定控制,而且可改善车队综合性能.Abstract: In view of the current situation of traffic congestion, a general variable time headway policy (VTHP) for platoon control based on the existing roadside facilities and the relative position and speed of adjacent vehicles is proposed under the constraint or fault of communication between vehicles. By selecting variable travel time headway parameters, a uniform spacing policy and its error model between adjacent vehicles are established. Based on the stability analysis of internal vehicle, string and traffic flow under the general VTHP, the controller is designed synthetically. At the same time, the analysis method is extended to constant spacing policy (CSP) and constant time headway policy (CTHP). According to the above stability conditions, a calculation method of variable travel time headway with definite physical significance is given, and the boundary of variable time headway is obtained, so as to control the safety of vehicle spacing more accurately and quickly. The simulation results show that the general VTHP proposed in this paper can not only realize the stable control of the platoon and traffic flow, but also improve the overall performance of the platoon.1) 本文责任编委 李力
-

图 1 车队间距控制(虚线代表信息传输方向)
Fig. 1 Spacing control of the platoon (The dotted line represents the direction of information transmission.)
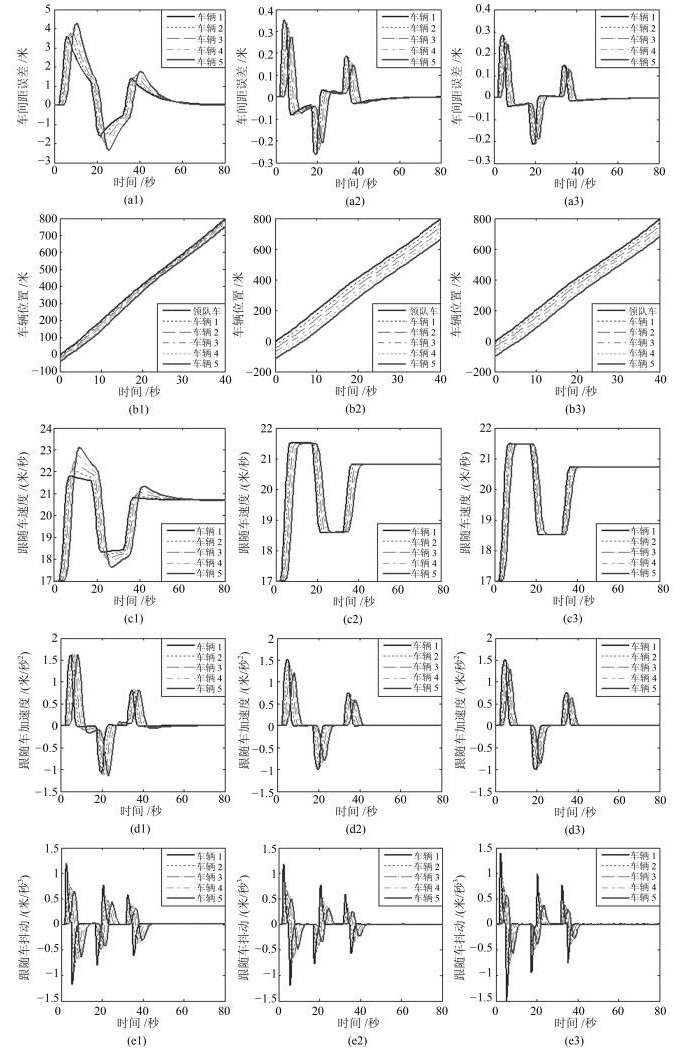
图 3 车间距策略比较(第1~3列图分别采用固定间距、固定时距以及可变时距策略)
Fig. 3 Comparison results with different spacing policies (CSP, CTHP and VTHP are used for column 1 to 3 of the diagram respectively.)
表 1 车队参数说明
Table 1 Platoon parameters explanation
符号 定义 $p_i(t)$, $v_i(t)$, $a_i(t)$ 车辆位置、速度、加速度 $\eta$ 发动机时间常数 $u_{i}(t)$ 每辆车的控制量 $e_i(t)$ 车头间距误差 $\psi_{i}(t)$ 实际车头间距 $l$ 每辆车的长度, 设为常数 $d$ 期望静态间距, 设为常数 $h_{i}(t)$ 车辆间行驶时距  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数
Table 2 Simulation parameters
$k_{pi}$ $k_{vi}$ $\sigma$ $c$ $\sigma_1$ $c_1$ $\mu$ 0.1 1.1 0.05 0.9 0.09 0.7 0.1 注: $k_{pi}$、$k_{vi}$为固定间距策略的控制增益.
下载: 导出CSV
表 3 车队综合性能
Table 3 Comprehensive performance of the platoon
性能指标 车间距策略 固定间距 固定时距 可变时距 行驶时距 0秒 0.9秒 可变 车头间距 8米 23.5米 约20米 单车稳定 是 是 是 队列稳定 否 是 是 交通流稳定 ~ 否 是 车间距误差 4.30米 0.36米 0.30米 速度跟踪 波动大 一致 一致 加速度跟踪 有波动 缓和 精度高 抖动大小 1.2米/秒$^{3}$ 1.25米/秒$^{3}$ 1.5米/秒$^{3}$ 抖动时间 长 较短 短
下载: 导出CSV
-
[1] Colombo A, Gabriel R D C, Della Rossa F. Control of a city road network:distributed exact verification of traffic safety. IEEE Transactions on Automatic Control, 2017, 62(10):4933-4948 doi: 10.1109/TAC.2017.2676464 [2] 柴天佑.自动化科学与技术发展方向.自动化学报, 2018, 44(11):1923-1930 http://www.aas.net.cn/CN/abstract/abstract19376.shtmlChai Tian-You. Development directions of automation science and technology. Acta Automatica Sinica, 2018, 44(11):1923-1930 http://www.aas.net.cn/CN/abstract/abstract19376.shtml [3] Tithi T, Deka B, Gerdes R M, Winstead C, Li M, Heaslip K. Analysis of friendly jamming for secure location verification of vehicles for intelligent highways. IEEE Transactions on Vehicular Technology, 2018, 67(8):7437-7449 doi: 10.1109/TVT.2018.2839560 [4] Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS:a unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatic Sinica, 2017, 4(4):577-587 doi: 10.1109/JAS.2017.7510598 [5] Li L, Peng X Y, Wang F Y, Cao D P, Li L X. A situation-aware collision avoidance strategy for car-following. IEEE/CAA Journal of Automatic Sinica, 2018, 5(5):1012-1016 doi: 10.1109/JAS.2018.7511198 [6] 原豪男, 郭戈.交通信息物理系统中的车辆协同运行优化调度.自动化学报, 2019, 45(1):143-152 http://www.aas.net.cn/CN/abstract/abstract19423.shtmlYuan Hao-Nan, Guo Ge. Vehicle cooperative optimization scheduling in transportation cyber physical systems. Acta Automatica Sinica, 2019, 45(1):143-152 http://www.aas.net.cn/CN/abstract/abstract19423.shtml [7] Ali A, Garcia G, Martinet P. The flatbed platoon towing model for safe and dense platooning on highways. IEEE Intelligent Transportation Systems Magazine, 2015, 7(1):58-68 doi: 10.1109/MITS.2014.2328670 [8] Zheng Y, Li S B E, Wang J Q, Cao D P, Li K Q. Stability and scalability of homogeneous vehicular platoon:study on the influence of information flow topologies. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1):14-26 doi: 10.1109/TITS.2015.2402153 [9] Ghasemi A, Kazemi R, Azadi S. Stable decentralized control of a platoon of vehicles with heterogeneous information feedback. IEEE Transactions on Vehicular Technology, 2013, 62(9):4299-4308 doi: 10.1109/TVT.2013.2253500 [10] Yue W, Guo G, Wang L Y, Wang W. Nonlinear platoon control of Arduino cars with range-limited sensors. International Journal of Control, 2015, 88(5):1037-1050 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1080/00207179.2014.992962 [11] Besselink B, Johansson K H. String stability and a delay-based spacing policy for vehicle platoons subject to disturbances. IEEE Transactions on Automatic Control, 2017, 62(9):4376-4391 doi: 10.1109/TAC.2017.2682421 [12] Gao F, Li S B E, Zheng Y, Kum D S. Robust control of heterogeneous vehicular platoon with uncertain dynamics and communication delay. IET Intelligent Transport Systems, 2016, 10(7):503-513 doi: 10.1049/iet-its.2015.0205 [13] Liu B, Gao F, He Y D, Wang C M. Robust control of heterogeneous vehicular platoon with non-ideal communication. Electronics, 2019, 8(2):207-221 doi: 10.3390/electronics8020207 [14] Wang J M, Rajamani R. Should adaptive cruise-control systems be designed to maintain a constant time gap between vehicles. IEEE Transactions on Vehicular Technology, 2004, 53(5):1480-1490 doi: 10.1109/TVT.2004.832386 [15] Chehardoli H, Ghasemi A. Adaptive centralized/decentralized control and identification of 1-D heterogeneous vehicular platoons based on constant time headway policy. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(10):3376-3386 doi: 10.1109/TITS.2017.2781152 [16] Bekiaris-Liberis N, Roncoli C, Papageorgiou M. Predictor-based adaptive cruise control design. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(10):3181-3195 doi: 10.1109/TITS.2017.2771501 [17] Guo X G, Wang J L, Liao F, Teo R S H. Distributed adaptive sliding mode control strategy for vehicle-following systems with nonlinear acceleration uncertainties. IEEE Transactions on Vehicular Technology, 2017, 66(2):981-991 doi: 10.1109/TVT.2016.2556938 [18] Ploeg J, Nathan V D W, Nijmeijer H. $\mathcal{L}_p$ string stability of cascaded systems:Application to vehicle platooning. IEEE Transactions on Control Systems Technology, 2014, 22(2):786-793 doi: 10.1109/TCST.2013.2258346 [19] Feng S, Sun H W, Zhang Y, Zheng J F, Liu H X, Li L. Tube-based discrete controller design for vehicle platoons subject to disturbances and saturation constraints. IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2019.2896539 [20] Yanakiev D, Kanellakopoulos I. Nonlinear spacing policies for automated heavy-duty vehicles. IEEE Transactions on Vehicular Technology, 1998, 47(4):1365-1377 doi: 10.1109/25.728529 [21] Zhang J L, Ioannou P A. Longitudinal control of heavy trucks in mixed traffic:environmental and fuel economy considerations. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(1):92-104 doi: 10.1109/TITS.2006.869597 [22] Rajaram V, Subramanian S C. Heavy vehicle collision avoidance control in heterogeneous traffic using varying time headway. Mechatronics, 2018, 50:328-340 doi: 10.1016/j.mechatronics.2017.11.010 [23] Rödönyi G. An adaptive spacing policy guaranteeing string stability in multi-brand Ad Hoc platoons. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(6):1902-1912 doi: 10.1109/TITS.2017.2749607 [24] Mammar S, Oufroukh N A, Yacine Z, Ichalal D, Nouveliére L. Invariant set based variable headway time vehicle longitudinal control assistance. In: Proceedings of the 2012 American Control Conference. Montréal, Canada: IEEE, 2012. 2922-2927 [25] Knorn S, Middleton R H. Stability of two-dimensional linear systems with singularities on the stability boundary using LMIs. IEEE Transactions on Automatic Control, 2013, 58(10):2579-2590 doi: 10.1109/TAC.2013.2264852 [26] Zhou J, Peng H. Range policy of adaptive cruise control vehicles for improved flow stability and string stability. IEEE Transactions on Intelligent Transportation Systems, 2005, 6(2):229-237 doi: 10.1109/TITS.2005.848359 [27] Sungu H E, Inoue M, Imura J I. Nonlinear spacing policy based vehicle platoon control for local string stability and global traffic flow stability. In: Proceedings of the 2015 European Control Conference (ECC). Linz, Austria: IEEE, 2015. 3396-3401 [28] Ntousakis I A, Nikolos I K, Papageorgiou M. On microscopic modelling of adaptive cruise control systems. Transportation Research Procedia, 2015, 6:111-127 doi: 10.1016/j.trpro.2015.03.010 -

 下载:
下载:

计量
- 文章访问数: 2598
- HTML全文浏览量: 500
- PDF下载量: 552
- 被引次数: 0
